Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для направления движущегося объекта, а более конкретно к системе для направления движущегося объекта, такого как мобильный робот, к зарядному устройству.
Предшествующий уровень техники
Обычно робот, разработанный для промышленных целей, широко используется для автоматизации производственного процесса и собирает за человека данные или информацию в условиях чрезвычайной ситуации, которая непереносима для человека.
В последнее время вышеупомянутые роботизированные технологии использовались для космических отраслей и быстро развивались в различных направлениях, что в результате привело к созданию удобных для человека бытовых роботов.
В бытовом мобильном роботе, чтобы обеспечить мобильность в любом месте, используется батарея. Если напряжение заряда батареи равно или меньше, чем заранее заданное напряжение, бытовой мобильный робот запрограммирован на автоматическое возвращение к зарядному устройству, чтобы осуществить перезарядку батареи.
Для нормального возвращения мобильного робота к зарядному устройству требуется, чтобы мобильный робот распознавал свое собственное относительное местоположение по отношению к зарядному устройству.
Типичная технология по возвращению мобильного робота к зарядному устройству представляет собой способ использования выходных данных кодового датчика положения, установленного на движущемся колесе. Эта технология имеет недостаток, заключающийся в том, что она не может компенсировать ошибки, вызванные проскальзыванием или вращением вхолостую колеса, так что она рассматривается как нежелательный способ.
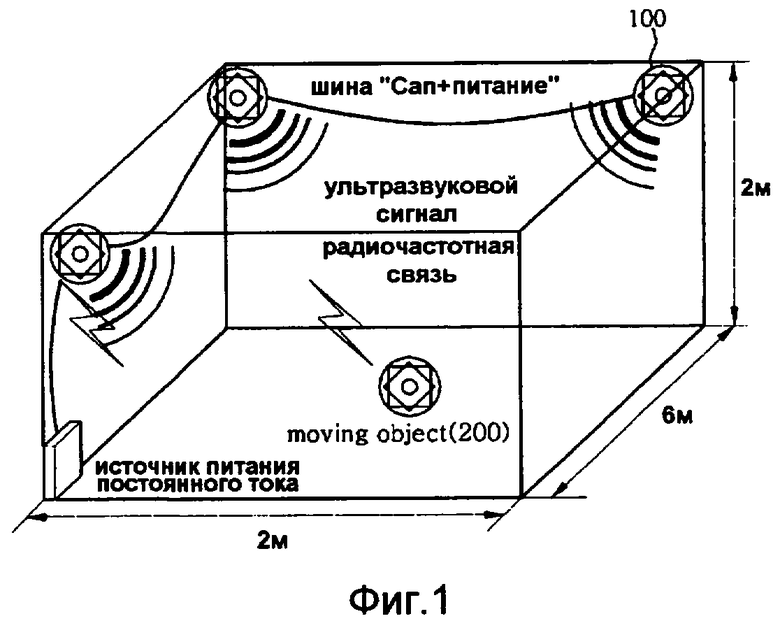
На фиг.1 представлена известная схема системы для оценки относительного местоположения робота, выступающего в качестве движущегося объекта.
Эта система включает в себя множество модулей-маяков (100), установленных во многих местах на потолке помещения, так что она оценивает относительное местоположение мобильного робота (200). Каждый модуль-маяк (100) включает в себя ультразвуковой передатчик и радиочастотный (RF) приемник.
Если мобильный робот (200), оснащенный ультразвуковым приемником и радиочастотным передатчиком, запрашивает генерирование ультразвукового сигнала с модуля-маяка (100), модуль-маяк (100) после приема этого запроса передает ультразвуковой сигнал мобильному роботу (200). Вследствие этого мобильный робот (200) рассчитывает время прибытия ультразвукового сигнала, посылаемого из каждого модуля-маяка (100), так что он может рассчитать расстояние до каждого маяка (100). Мобильный робот (200) оценивает свое относительное местоположение, так что он может вернуться к зарядному устройству.
Однако вышеупомянутая система по использованию маяка имеет недостаток, заключающийся в том, что на потолке помещения во многих местах должно быть установлено множество маяков, так что затраты на реализацию системы неизбежно возрастают вследствие использования многих маяков.
Сущность изобретения
Задача настоящего изобретения заключается в создании системы для направления движущегося объекта, для минимизации затрат на реализацию системы и в то же время для направления движущегося объекта к зарядному устройству без использования дополнительных модулей.
Другой задачей настоящего изобретения является создание системы, направляющей движущийся объект, для корректировки траектории движения движущегося объекта в реальном масштабе времени и для быстрого направления движущегося объекта к заданному местоположению.
В соответствии с настоящим изобретением поставленные задачи решены путем создания системы для направления движущегося объекта, предназначенной для направления движущегося объекта к заданному местоположению и содержащей блок для направления движущегося объекта, содержащий передатчик направляющего сигнала, предназначенный для генерирования первого сигнала, направляющего движущийся объект, последовательной передачи первого сигнала, направляющего движущийся объект, на 360° во всех направлениях, генерирования второго сигнала, направляющего движущийся объект, соответствующего направляющей информации для направления движущегося объекта к заданному местоположению после приема сигнала, свидетельствующего об успешном приеме первого сигнала, направляющего движущийся объект, и передачи второго сигнала, направляющего движущийся объект, и первый блок радиочастотной (RF) связи для приема сигнала, свидетельствующего об успешном приеме сигнала, направляющего движущийся объект, при этом движущийся объект содержит второй блок радиочастотной (RF) связи для беспроводной передачи блоку, направляющему движущийся объект, сигнала, свидетельствующего об успешном приеме сигнала, направляющего движущийся объект, и контроллер для управления операциями колеса в соответствии с направляющей информацией принятого сигнала, направляющего движущийся объект.
Следовательно, система для направления движущегося объекта в соответствии с настоящим изобретением может направлять движущийся объект (например, мобильный робот) к заданному местоположению на основе информации, направляющей движущийся объект, которая передается в реальном масштабе времени из блока, направляющего движущийся объект (то есть зарядного устройства), так что может быть реализована недорогая система, способная перемещать движущийся объект к заданному местоположению без использования дополнительных модулей, таких как маяки.
Краткое описание чертежей
Вышеперечисленные и другие задачи, признаки и преимущества настоящего изобретения будут более понятны из приведенного подробного описания предпочтительных вариантов воплощения со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает схему концептуального представления известной системы для оценки относительного местоположения мобильного робота, выступающего в качестве движущегося объекта;
фиг.2 - структурную схему системы для направления движущегося объекта в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
фиг.3 - структурную схему системы для направления движущегося объекта в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения;
фиг.4 - схему концептуального представления, иллюстрирующую операции системы для направления движущегося объекта, согласно изобретению.
Описание предпочтительных вариантов осуществления изобретения
Ниже со ссылкой на прилагаемые чертежи подробно описаны предпочтительные варианты осуществления настоящего изобретения.
Прежде чем описывать настоящее изобретение, следует отметить, что термин «движущийся объект» касается мобильного робота, например, робота-уборщика или бытового робота. Мобильный робот перемещается при помощи колес, но при необходимости может быть приведен в качестве примера и мобильный робот, основанный на шарнирном механизме.
Система для направления движущегося объекта в соответствии с предпочтительным вариантом осуществления настоящего изобретения представлена на фиг.2.
Система для направления движущегося объекта содержит блок 300 для направления движущегося объекта и движущийся объект 400.
Блок 300 для направления движущегося объекта содержит блоки 320 и 330 передачи направляющих сигналов и первый блок 310 радиочастотной (RF) связи.
Блоки 320 и 330 передачи направляющих сигналов генерируют первый сигнал для направления движущегося объекта 400 и передают первый сигнал движущемуся объекту 400. После приема ответного сигнала, свидетельствующего об успешном приеме первого сигнала, из движущегося объекта 400 блоки 320 и 330 передачи направляющих сигналов генерируют второй сигнал для направления движущегося объекта 400 так, чтобы направить движущийся объект 400 к заданному местоположению (например, к месту стыковки с зарядным устройством) и выводят второй сигнал движущемуся объекту 400.
Первый блок 310 радиочастотной связи принимает сигнал, свидетельствующий об успешном приеме второго сигнала для направления движущегося объекта 400.
Блок 300 для направления движущегося объекта может быть реализован при помощи дополнительного модуля, независимого от зарядного устройства. Предпочтительно, чтобы блок 300 для направления движущегося объекта мог быть интегрирован с зарядным устройством, требующимся для зарядки батареи движущегося объекта 400.
Блок 300 для направления движущегося объекта включает в себя первый блок 310 радиочастотной связи для осуществления связи с движущимся объектом 400, чтобы сообщать движущемуся объекту 400 об успешном приеме сигнала, направляющего движущийся объект.
Кроме того, блок 300 для направления движущегося объекта, включает в себя генераторы 332 и 333 сигнала, направляющего движущийся объект, которые действуют в качестве передатчиков направляющего сигнала, отражающее зеркало 334, блок 335 поворота зеркала и контроллер 320.
Генераторы 332 и 333 сигнала, направляющего движущийся объект, генерируют сигналы, направляющие движущийся объект, в соответствии с управляющим сигналом контроллера 320 и выводят эти сигналы, направляющие движущийся объект.
Генераторы 332 и 333 сигнала, направляющего движущийся объект, могут быть реализованы при помощи усилителя 332 для усиления сигнала и передатчика 333 инфракрасного излучения, оснащенного инфракрасным светоизлучающим диодом (LED). Следовательно, сигнал, направляющий движущийся объект, соответствует инфракрасному лучу для направления движущегося объекта и включает в себя специальную информацию, требующуюся для направления движущегося объекта. Подробное описание сигнала, направляющего движущийся объект, будет приведено ниже.
Отражающее зеркало 334 отражает сигналы, направляющие движущийся объект, сформированные генераторами 332 и 333 сигнала, направляющего движущийся объект, и поворачивается на 360 градусов (то есть 360°) блоком 335 поворота, т.е. электроприводом, приводимым в действие контроллером 320.
Если описать это более подробно, то сигналы, направляющие движущийся объект, сформированные генераторами 332 и 333 сигнала, направляющего движущийся объект, могут быть переданы на 360° во всех направлениях посредством отражающего зеркала 334 и блока 335 поворота.
Контроллер 320 управляет операциями блока 300 для направления движущегося объекта на основе данных управляющей программы, хранящихся во внутреннем запоминающем устройстве. Например, контроллер 320 управляет формированием сигнала, направляющего движущийся объект, и углом поворота отражающего зеркала 334, генерирует сигналы, направляющие движущийся объект, и последовательно выводит сигналы, направляющие движущийся объект, на 360° во всех направлениях.
После приема из первого блока 310 радиочастотной связи сигнала, свидетельствующего об успешном приеме сигнала, направляющего движущийся объект, контроллер 320 останавливает поворот отражающего зеркала 334 и генерирует сигнал, направляющий движущийся объект, соответствующий углу поворота отражающего зеркала 334, так, что он выполняет отслеживание движущегося объекта 400 до тех пор, пока тот не достигнет заданного местоположения.
Предполагается, что информация об угле поворота отражающего зеркала может быть равна информации, направляющей движущийся объект. И информация об угле поворота отражающего зеркала может быть определена как угол смещения движущегося объекта 400, исходя из заданного местоположения (например, места стыковки с зарядным устройством).
В то же время, движущийся объект 400 принимает сигнал, направляющий движущийся объект, из блока 300 для направления движущегося объекта и перемещается к заданному местоположению в соответствии с информацией, направляющей движущийся объект, содержащейся в принятом сигнале.
Движущийся объект 400 (фиг.2) содержит приемник 460 для приема сигнала, направляющего движущийся объект. Приемник 460 может быть реализован при помощи приемника инфракрасного излучения, включающего в себя как блок 461 приема инфракрасного светового излучения, так и усилитель 462 для усиления сигнала. При необходимости, для того чтобы поднять скорость приема сигнала, направляющего движущийся объект, и улучшить характеристику отслеживания, может быть использовано множество приемников 460.
Если в системе содержится множество приемников 460, то контроллер 420 движущегося объекта 400 управляет приводом колеса таким образом, чтобы принимать сигнал, направляющий движущийся объект, посредством центрального приемника инфракрасного излучения из множества приемников инфракрасного излучения.
Кроме того, движущийся объект 400 включает в себя второй блок 410 радиочастотной (RF) связи для осуществления связи с блоком 300 для направления движущегося объекта. Контроллер 420 движущегося объекта 400 может посредством второго блока 410 радиочастотной связи передавать блоку 300 для направления движущегося объекта сигнал, свидетельствующий об успешном приеме сигнала, направляющего движущийся объект.
Контроллер 420 движущегося объекта 400 управляет всеми операциями движущегося объекта 400 на основе данных управляющей программы, хранящихся во внутреннем запоминающем устройстве. Например, после приема сигнала, направляющего движущийся объект, из приемника 420 контроллер 420 передает посредством второго блока 410 радиочастотной связи блоку 300 для направления движущегося объекта сигнал, свидетельствующий об успешном приеме сигнала, направляющего движущийся объект, и управляет приводом колеса в соответствии с направляющей информацией, содержащейся в сигнале, направляющем движущийся объект, переданном из блока 300 для направления движущегося объекта.
Движущийся объект 400 содержит также блок датчиков, содержащий множество датчиков, способных обнаруживать уступ (или спуск), давление и препятствие так же, как в обычном роботе-уборщике. Движущийся объект 400 включает также привод 430 электродвигателя колеса, электродвигатель 440 колеса и датчик 450 величины поворота, так что он может перемещаться посредством операций вышеупомянутых элементов 430, 440 и 450.
Привод 430 электродвигателя колеса приводит в действие электродвигатель (М) колеса после приема из контроллера 420 сигнала управления приводом. Датчик 450 величины поворота, действуя в качестве кодового датчика положения, соединенного с левым и правым колесами, определяет величину поворота левого и правого колес, рассчитывает данные количества оборотов, соответствующие этой определенной величине поворота, и передает рассчитанные данные количества оборотов контроллеру 420.
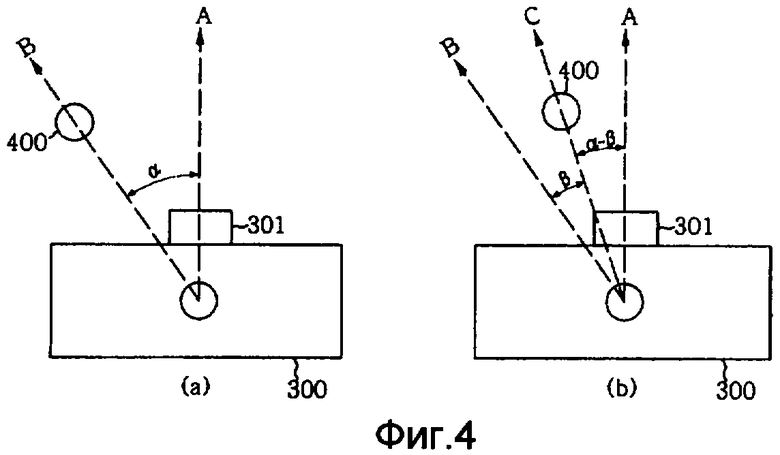
Ниже со ссылкой на фиг.4 описаны операции системы для направления движущегося объекта, в соответствии с настоящим изобретением.
В центре боковой стороны зарядного устройства расположено зарядное гнездо 301. На зарядном устройстве размещены генератор сигнала, направляющего движущийся объект, отражающее зеркало и блок поворота отражающего зеркала, так что сигнал, направляющий движущийся объект, может быть направлен на 360° во всех направлениях.
Место стыковки размещается в центральной части зарядного гнезда 301, место стыковки и генератор сигнала, направляющего движущийся объект, располагаются на оси А. В этом случае ось А может быть установлена на заданное местоположение движущегося объекта 400.
Если системе необходимо переместить движущийся объект 400 к месту стыковки с зарядным устройством при условии, что движущийся объект размещен на оси В, то блок 300 для направления движущегося объекта должен сначала определить местоположение движущегося объекта 400.
Контроллер 320 блока 300 для направления движущегося объекта генерирует управляющий код, способный сначала сформировать сигнал, направляющий движущийся объект, и выводит этот управляющий код в генераторы 332 и 333 сигнала, направляющего движущийся объект.
Генераторы 332 и 333 сигнала, направляющего движущийся объект, генерируют сигнал, направляющий движущийся объект, в соответствии с управляющим кодом и передают этот сигнал, направляющий движущийся объект, далее посредством отражающего зеркала 334.
Если контроллер 320 не принимает посредством первого блока 310 радиочастотной связи сигнал, свидетельствующий об успешном приеме сигнала, направляющего движущийся объект, после передачи сигнала, направляющего движущийся объект, то контроллер 320 поворачивает отражающее зеркало 334 на заранее определенный угол, управляя блоком 335 поворота отражающего зеркала, и в то же самое время перемещает отражающее зеркало 334. Если контроллер 320 повторно генерирует управляющий код, способный генерировать сигнал, направляющий движущийся объект, то сигнал, направляющий движущийся объект, соответствующий управляющему коду, испускается в другом направлении, отличном от предыдущего направления.
Следовательно, если контроллер 320 управляет генерированием сигнала, направляющего движущийся объект, одновременно с поворотом отражающего зеркала 334, то сигнал, направляющий движущийся объект, испускается на 360° во всех направлениях.
Если контроллер 420 движущегося объекта 400 принимает посредством приемника 460, такого как приемник инфракрасного излучения, сигнал, направляющий движущийся объект, то он передает специальную информацию, свидетельствующую об успешном приеме сигнала, направляющего движущийся объект, блоку 300 для направления движущегося объекта посредством второго блока 410 радиочастотной связи.
Следовательно, если контроллер 320 блока 300 для направления движущегося объекта принимает посредством первого блока 310 радиочастотной связи сигнал, свидетельствующий об успешном приеме сигнала, направляющего движущийся объект, во время того, как он последовательно поворачивает отражающее зеркало 334 и в то же самое время передает сигнал, направляющий движущийся объект, на 360° во всех направлениях, то принимается решение, что контроллер 320 блока 300 для направления движущегося объекта определил местоположение движущегося объекта 400, так что он останавливает поворот отражающего зеркала 334.
Если местоположение движущегося объекта 400 полностью определено, как это описано выше, то контроллер 320 формирует управляющий код, соответствующий информации об угле поворота отражающего зеркала 334, и передает этот управляющий код в генераторы 332 и 333 сигнала, направляющего движущийся объект, так что сигнал, направляющий движущийся объект и соответствующий информации об угле поворота отражающего зеркала 334, может быть передан приемнику 460 движущегося объекта 400.
Вследствие этого, контроллер 420 движущегося объекта 400 принимает сигнал, направляющий движущийся объект, посредством приемника 460, демодулирует принятый сигнал, направляющий движущийся объект, получает информацию об угле поворота отражающего зеркала и управляет приводом колеса в соответствии с полученной информацией об угле поворота, так что он может подъехать к заданному местоположению.
Например, если движущийся объект 400 расположен в конкретном местоположении, смещенном на заранее определенный угол α от заданного местоположения А, то контроллер 420 движущегося объекта 400 получает значение α, относящееся к информации об угле поворота отражающего зеркала.
Вследствие этого, контроллер 420 движущегося объекта 400 перемещается в некотором направлении для уменьшения значения α, относящегося к информации об угле поворота отражающего зеркала (фиг.4(b)).
В этом случае контроллер 320 блока 300 для направления движущегося объекта может оценить направление перемещения и расстояние перемещения движущегося объекта 400. Если контроллер 320 поворачивает отражающее зеркало 334 в полученном в результате оценки направлении для повторной передачи сигнала, направляющего движущийся объект, и повторно передает информацию об угле поворота отражающего зеркала, соответствующую наличию или отсутствию принятого сигнала, направляющего движущийся объект, то движущийся объект 400 может достигнуть заданного местоположения А посредством повторения вышеупомянутых операций контроллера 320.
Если движущийся объект достигает заданного местоположения А, то контроллер 320 блока 300 для направления движущегося объекта непрерывно передает сигнал, направляющий движущийся объект, при условии, что отражающее зеркало 334 зафиксировано в конкретном положении. В этом случае, если контроллер 420 движущегося объекта 400 управляет приводом колеса таким образом, чтобы принимать сигнал, направляющий движущийся объект, посредством приемника, расположенного в центральной части, из нескольких приемников 460, то движущийся объект 400 может быть быстро и точно направлен к зарядному гнезду 301 вдоль оси А, служащей в качестве заданного местоположения.
Следовательно, система для направления движущегося объекта в соответствии с настоящим изобретением может легко направить движущийся объект 400 к заданному местоположению, такому как зарядное устройство, без использования нескольких модулей связи, таких как маяки.
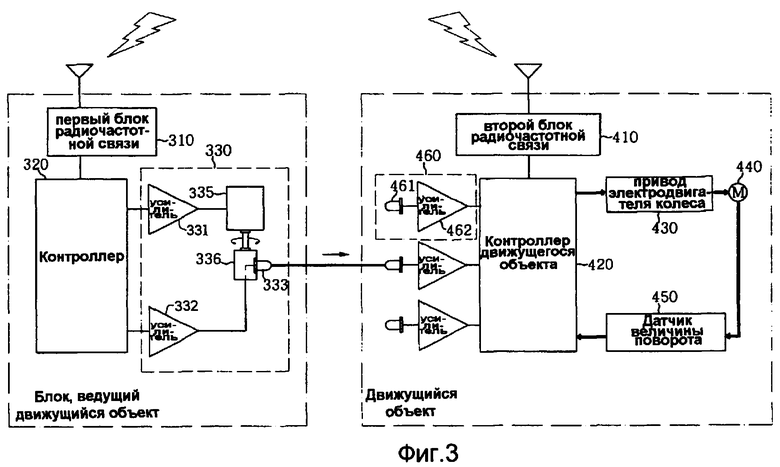
Как было описано выше, хотя система для направления движущегося объекта в соответствии с настоящим изобретением последовательно поворачивает отражающее зеркало 334 и передает сигнал, направляющий движущийся объект, на 360° во всех направлениях, система для направления движущегося объекта может быть также реализована посредством поворота инфракрасного светоизлучающего диода 333, соответствующего генератору сигнала, направляющего движущийся объект (фиг.3).
Иначе говоря, если соединитель 336, сопряженный с инфракрасным светоизлучающим диодом 333, выступающим в качестве генератора сигнала, направляющего движущийся объект, соединен с осью вращения электродвигателя, выступающего в качестве блока 335 поворота, то сигнал, направляющий движущийся объект и сформированный инфракрасным светоизлучающим диодом 333, может выводиться с поворотом на 360° во всех направлениях в соответствии с поворотом электродвигателя.
На фиг.3 представлена структурная схема, иллюстрирующая систему для направления движущегося объекта в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения.
Если блок 300 для направления движущегося объекта принимает посредством первого блока 310 радиочастотной связи сигнал, свидетельствующий об успешном приеме сигнала, направляющего движущийся объект, то он генерирует сигнал, направляющий движущийся объект и соответствующий информации об угле поворота генератора 335 сигнала, направляющего движущийся объект.
Вследствие этого, движущийся объект 400, который принял сигнал, направляющий движущийся объект и соответствующий информации об угле поворота генератора 334 сигнала, направляющего движущийся объект, может быть направлен к заданному местоположению А таким же образом, как в первом случае, и также может быть направлен к зарядному гнезду 301 вдоль заданного местоположения А.
Как очевидно из вышеприведенного описания, система для направления движущегося объекта в соответствии с настоящим изобретением может направлять движущийся объект (например, мобильный робот) к заданному местоположению на основе информации, направляющей движущийся объект, которая передается в реальном масштабе времени из блока, направляющего движущийся объект (то есть из зарядного устройства), так что может быть реализована недорогая система, способная перемещать движущийся объект к заданному местоположению без использования дополнительных модулей, таких как маяки.
В дополнение к этому система, направляющая движущийся объект, в соответствии с настоящим изобретением корректирует траекторию движения движущегося объекта в реальном масштабе времени, так что движущийся объект может быть быстро направлен к заданному местоположению.
Хотя предпочтительные варианты осуществления настоящего изобретения и были раскрыты в иллюстративных целях, специалисты в данной области техники поймут, что возможны разнообразные изменения, дополнения и замены, что не выходит за рамки объема и сущности изобретения, раскрытых в прилагаемой формуле изобретения.
Изобретение относится к системам позиционирования движущегося объекта и предназначено для направления мобильного робота к зарядному устройству. Технический результат - возможность коррекции траектории движения объекта и повышение быстродействия. Система содержит блок для направления движущегося объекта и движущийся объект. Блок для направления движущегося объекта содержит передатчик направляющего сигнала, предназначенный для генерирования первого сигнала, направляющего движущийся объект, последовательной передачи первого сигнала, направляющего движущийся объект, на 360° во всех направлениях, генерирования второго сигнала, соответствующего направляющей информации для направления движущегося объекта к заданному местоположению после приема сигнала, свидетельствующего об успешном приеме первого сигнала, направляющего движущийся объект. Система содержит также первый блок радиочастотной (RF) связи для приема сигнала, свидетельствующего об успешном приеме сигнала, направляющего движущийся объект. Движущийся объект содержит второй блок радиочастотной (RF) связи для беспроводной передачи блоку для направления движущегося объекта сигнала, свидетельствующего об успешном приеме сигнала, направляющего движущийся объект, и контроллер для управления колесами. 11 з.п. ф-лы, 4 ил.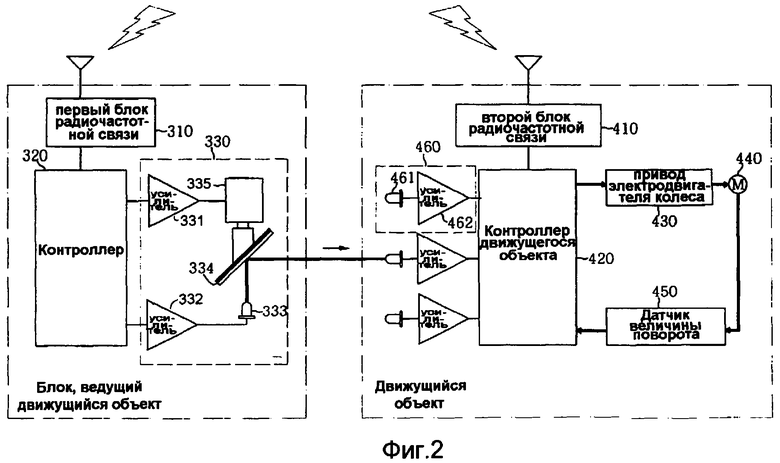
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2250486C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 А, 04.08.1998. | |||

