Область техники, к которой относится изобретение
Настоящее изобретение относится к чистящему роботу, а более точно к чистящему роботу, имеющему функцию автовозврата к зарядному устройству, причем чистящий робот способен точно и быстро возвращаться к зарядному устройству для чистящего робота, используя графическую информацию, введенную от камеры, и способу его использования.
Предшествующий уровень техники
Чистящий робот является устройством, предназначенным для беспорядочного перемещения по заданной очищаемой площади, такой как дом и офис, и всасывания пыли или грязи. Чистящий робот включает в себя элементы основного вакуумного очистителя (пылесоса), а также другие элементы. Другие элементы содержат устройство перемещения, предназначенное для перемещения чистящего робота, большое количество сенсоров для детектирования столкновения чистящего робота, т.е. чтобы осуществлять его движение без столкновения с различными препятствиями, и микропроцессор для управления указанными элементами чистящего робота. Энергия для чистящего робота поступает от аккумулятора для приведения его в движение, когда он беспорядочно движется по очищаемой площади.
С другой стороны, чистящий робот имеет функцию автоматической подзарядки для удобства пользователя. Для выполнения функции автоматической подзарядки чистящий робот проверяет уровень энергии, оставшейся в аккумуляторе. Если уровень энергии, оставшейся в аккумуляторе, ниже контрольного значения, то чистящий робот автоматически возвращается к зарядному устройству, которое расположено в заранее определенном положении на очищаемой площади, и повышает недостаточный уровень энергии аккумулятора, и затем соответствующая операция запускается вновь.
Однако стандартный способ автовозврата чистящего робота к зарядному устройству - это способ прикрепления искусственной метки зарядному устройству, определения положения зарядного устройства, когда чистящий робот обнаруживает метку, прикрепленную к зарядному устройству, в процессе произвольного перемещения, и затем возвращение чистящего робота к зарядному устройству.
Но с момента, когда стандартный способ завершен в процессе произвольного перемещения, требуются различные времена возвращения к зарядному устройству в зависимости от положений чистящего робота. В стандартном способе, использующем произвольное перемещение, если требуется много времени для обнаружения искусственной метки, прикрепленной к зарядному устройству, то напряжение в аккумуляторе может совсем снизиться, пока происходит возвращение к зарядному устройству, и может произойти остановка перемещения чистящего робота.
Сущность изобретения
Настоящее изобретение направлено на устранение описанных выше проблем.
Технической задачей настоящего изобретения является создание чистящего робота, имеющего функцию автовозврата к зарядному устройству, при этом положение зарядного устройства определяется, используя графическую информацию, полученную посредством камеры, что позволит обеспечить быстрый возврат чистящего робота к зарядному устройству, а также задачей является создание способа использования чистящего робота.
Другой задачей настоящего изобретения является создание чистящего робота, имеющего функцию автовозврата к зарядному устройству, причем всякий раз, когда чистящий робот перемещается на заранее определенное расстояние, осуществляется сбор информации об окружении зарядного устройства, которая запоминается посредством входных изображений, что позволит обеспечить быстрый возврат чистящего робота к зарядному устройству, а также создание способа использования чистящего робота.
В соответствии с одним аспектом настоящего изобретения поставленная задача решена путем создания чистящего робота, имеющего функцию автовозврата к зарядному устройству, при этом робот характеризуется тем, что имеет функцию фотографирования и хранения изображения зарядного устройства, когда обнаруживает сигнал обратной связи от зарядного устройства, функцию фотографирования внешнего изображения, подтверждая положение зарядного устройства сфотографированным внешним изображением, и функцию возврата к зарядному устройству.
Предпочтительно чистящий робот дополнительно содержит блок камеры для фотографирования внешнего изображения, содержащего изображение зарядного устройства, преобразования его в электрическую графическую информацию, и вывода этой информации, микропроцессор для сохранения графической информации, полученной посредством блока камеры, сбора данных о положении зарядного устройства из внешнего изображения на базе графической информации о зарядном устройстве при обнаружении сигнала обратной связи, и возврата чистящего робота к зарядному устройству.
Предпочтительно, чистящий робот дополнительно содержит блок памяти для хранения управляющей программы по перемещению чистящего робота, причем память включает в себя базу данных графической информации для хранения графической информации о зарядном устройстве для чистящего робота, и цепь индикации напряжения для проверки напряжения на аккумуляторе чистящего робота в течение каждого заранее определенного периода, и вывода сигнала запроса на подзарядку, когда обнаруженное напряжение на аккумуляторе ниже контрольного значения.
Предпочтительно, чистящий робот дополнительно содержит блок управления, предназначенный для управления перемещением чистящего робота, блок сбора графической информации, предназначенной для выделения графической информации о зарядном устройстве из графической информации, полученной блоком камеры, и сохранения выделенной графической информации о зарядном устройстве в базе данных графической информации, и блок вычисления положения зарядного устройства, предназначенный для поиска графической информации о зарядном устройстве в графической информации, полученной блоком камеры, когда сигнал запроса на подзарядку получен от цепи индикации напряжения на аккумуляторе, для сбора информации о положении зарядного устройства, и вывода сигнала управления перемещением на блок управления перемещением, при этом сигнал управления перемещением обеспечивает возврат чистящего робота к зарядному устройству в соответствии с полученной информацией о положении.
В соответствии с другим аспектом настоящего изобретения предложен чистящий робот, имеющий функцию автовозврата к зарядному устройству, при этом чистящий робот характеризуется тем, что осуществляет фотографирование для хранения изображения зарядного устройства и окружающей обстановки, когда обнаруживает сигнал обратной связи от зарядного устройства, фотографирует внешнее изображение, определяет изображение окружения зарядного устройства на сфотографированном внешнем изображении, подтверждает положение зарядного устройства и возвращается к зарядному устройству.
Предпочтительно, чистящий робот содержит блок камеры для фотографирования внешних изображений, содержащих изображение зарядного устройства и изображение окружения, преобразования сигналов в электрическую графическую информацию, и их вывод; микропроцессор для сохранения графической информации, полученной посредством блока камеры, сбора информации о положении зарядного устройства из внешнего изображения на базе информации об окружении зарядного устройства при обнаружении сигнала обратной связи, который обеспечивает возврат чистящего робота к зарядному устройству.
Предпочтительно, чистящий робот дополнительно содержит блок памяти для хранения управляющей программы для управления чистящим роботом, причем память включает в себя базу данных графической информации для хранения графической информации о зарядном устройстве и базу данных информации об окружении для хранения информации об окружении зарядного устройства, и цепь индикации напряжения для проверки напряжения на аккумуляторе чистящего робота в течении каждого заранее определенного периода и вывода сигнала запроса на подзарядку, когда обнаруженное напряжение на аккумуляторе ниже контрольного значения.
Предпочтительно, микропроцессор содержит блок управления, предназначенный для управления перемещением чистящего робота, блок сбора графической информации, предназначенный для выделения информации об окружении из изображения окружения зарядного устройства, полученного посредством блока камеры, и сохранения выделенной информации об окружении зарядного устройства в базе данных информации об окружении, блок вычисления положения зарядного устройства, предназначеный для поиска информации об окружении зарядного устройства в графической информации, полученной посредством блока камеры, когда сигнал запроса на подзарядку получен от цепи индикации напряжения на аккумуляторе, сбора информации о положении зарядного устройства на базе информации об окружении зарядного устройства, и вывода сигнала управления перемещением на блок управления перемещением, при этом сигнал управления перемещением обеспечивает возврат чистящего робота к зарядному устройству в соответствии с полученной информацией о положении.
Предпочтительно, микропроцессор дополнительно содержит блок управления камерой, предназначенный для управления фотографированием внешнего изображения в зависимости от сигнала управления фотографированием микропроцессора, блок фотографирования, предназначенный для фотографирования внешнего изображения в зависимости от сигнала управления блоком управления камерой, и конвертер для преобразования внешнего изображения, сфотографированного блоком фотографирования, в электрическую графическую информацию, и вывода электрической графической информации.
Следовательно, когда расстояние между зарядным устройством и чистящим роботом мало, чистящий робот вычисляет положение и направление, по которому находится зарядное устройство, используя графическую информацию о зарядном устройстве, и возвращается к зарядному устройству. Когда расстояние велико, чистящий робот вычисляет положение и направление, по которому находится зарядное устройство, используя информацию об окружении зарядного устройства, и таким образом быстро возвращается к зарядному устройству.
Краткое описание чертежей
В дальнейшем изобретение поясняется подробным описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему чистящего робота, имеющего функцию автовозврата к зарядному устройству, согласно изобретению;
фиг.2 - блок-схему чистящего робота, имеющего функцию автовозврата к зарядному устройству, согласно другому варианту осуществления изобретения;
фиг.3 - блок-схему последовательности операций способа автовозврата к зарядному устройству чистящего робота согласно изобретению;
фиг.4 - блок-схему последовательности операций способа автовозврата автовозврата к зарядному устройству чистящего робота согласно другому варианту осуществления изобретения.
Описание предпочтительных вариантов осуществления изобретения
На фиг.1 представлена блок-схема чистящего робота, имеющего функцию автовозврата к зарядному устройству в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Чистящий робот содержит общую базовую конфигурацию обычного чистящего робота. Кроме того, чистящий робот содержит блок 160 камеры для вывода изображения, полученного от линз, блок 170 памяти для хранения управляющей программы для управления чистящим роботом и содержащий базу 171 данных графической информации для хранения графической информации о зарядном устройстве, цепь 180 детектирования напряжения для проверки напряжения на аккумуляторе 140 чистящего робота и вывода сигнала запроса на подзарядку, когда напряжение на аккумуляторе 140 ниже контрольного значения, и микропроцессор 150 для управления указанными элементами.
Во-первых, обычная базовая конфигурация чистящего робота содержит датчик обнаружения пыли. Кроме того, базовая конфигурация обычного чистящего робота дополнительно содержит блок 110 всасывания, предназначенный для всасывания пыли или грязи, обнаруженной датчиком обнаружения пыли, блок 120 для приема пыли или грязи, собранной блоком 110 всасывания, блок 130 перемещения, предназначенный для перемещения чистящего робота, а также аккумулятор 140 для подачи напряжения питания на блок 110 всасывания и блок 130 перемещения (не показан), и микропроцессор 150 для управления указанными элементами. Подробное описание основной базовой конфигурации чистящего робота не приводится, так как полагается, что она хорошо известна.
Блок 160 камеры содержит систему 161 линз и дополнительно содержит блок 162 фотографирования для преобразования оптических сигналов системы 161 линз в аналоговые электрические сигналы, конвертер 163 для преобразования аналогового электрического сигнала, выведенного из блока 162 фотографирования, в цифровые сигналы и для преобразования цифровых сигналов в формат, доступный микропроцессору 150, и блок 164 управления камерой, предназначенный для управления работой указанных элементов или системы блоков.
Система 161 линз состоит из одной или множества линз маленького размера, при этом система 161 линз собирает свет и передает собранный свет блоку 162 фотографирования. Блок 162 фотографирования в основном содержит CMOS формирователь изображения или CCD формирователь изображения, причем указанные формирователи изображения хорошо известны для преобразования светового излучения в электрический сигнал по каждому пикселю, с синхронизацией электрического сигнала и последовательным выводом. Конвертер 163 преобразует напряжение или ток пропорционально яркости изображения, введенного через блок 162 фотографирования, в цифровые данные путем небольшой обработки и выводит цифровые данные. В другом варианте осуществления изобретения, ссылаясь на хорошо известный блок камеры, конвертер 163 может включать в себя кодек для сжатия сфотографированного изображения в JPEG формат или MPEG формат сжатия.
Блок 170 памяти содержит, например, энергонезависимое устройство памяти, например EEPROM или флэш память, которая хранит управляющую программу для управления чистящим роботом. Блок 170 памяти в соответствии с предпочтительным вариантом осуществления настоящего изобретения хранит контрольное значение напряжения, достаточное для перемещения чистящего робота, и содержит базу 171 данных графической информации для хранения графической информации о зарядном устройстве для чистящего робота. База 171 данных графической информации хранит графическую информацию о зарядном устройстве, например информацию о цвете или о форме зарядного устройства, которая извлечена из изображения зарядного устройства для чистящего робота, полученного посредством блока 160 камеры. Доступ к данным, хранящимся в блоке 170 памяти, контролируется микропроцессором 150.
Цепь 180 индикации напряжения, включенная в конструкцию чистящего робота, делит напряжение, подаваемое от аккумулятора 140, для поддержания напряжения питания, используя заранее определенное отношение сопротивления, и выводит разделенное обнаруженное напряжение. Микропроцессор 150 отображает пользователю границу для индикации уровня энергии, оставшейся в аккумуляторе 140 в соответствии с уровнем обнаруженного напряжения, полученного из цепи 180 индикации напряжения. Кроме того, цепь 180 индикации напряжения сравнивает напряжение, измеренное на аккумуляторе 140, с контрольным значением напряжения, достаточным для перемещения чистящего робота, которое хранится в блоке 170 памяти, и выводит сигнал запроса на подзарядку к микропроцессору 150, когда измеренное напряжение ниже контрольного значения напряжения.
Микропроцессор 150 содержит блок 151 управления перемещением чистящего робота, блок 152 сбора графической информации, предназначенный для извлечения графической информации о зарядном устройстве из изображения, полученного и сохраненного блоком 160 камеры, и сохранения графической информации в базе 171 данных, и блок 153 вычисления положения зарядного устройства для поиска графической информации о зарядном устройстве, хранящейся в базе 171 данных графической информации после ввода графической информации посредством блока камеры в соответствии с сигналом запроса на подзарядку, подтверждения положения зарядного устройства и таким образом вывода сигнала управления перемещением к блоку 151 управления перемещением, при этом сигнал управления перемещением заставляет чистящего робота вернуться к зарядному устройству в соответствии с собранной информацией о положении.
Блок 151 управления перемещением управляет блоком 130 перемещения чистящего робота в соответствии с управляющими командами, полученными от управляющей программы чистящего робота.
Блок 152 сбора графической информации выделяет графическую информацию о зарядном устройстве из изображения, введенного и сохраненного посредством блока 160 камеры в соответствии с управляющей командой программы управления чистящим роботом, и сохраняет эту графическую информацию в базе 171 данных графической информации. Графическая информация о зарядном устройстве является цветовой информацией или информацией о форме или изображением зарядного устройства, которое получено посредством блока 160 камеры. Например, блок 152 сбора графической информации собирает информацию о форме зарядного устройства или о зарядном устройстве из изображений, сфотографированных блоком 160 камеры, когда чистящий робот отклоняется от зарядного устройства.
Когда изображение зарядного устройства введено, блок 152 сбора графической информации выделяет соответствующую цветовую информацию о зарядном устройстве. В предпочтительном варианте осуществления настоящего изобретения зарядное устройство может быть окрашено в цвет, явно отличающийся от цвета электрической бытовой техники и хозяйственных предметов, которые обычно распределены по дому.
Блок 152 сбора графической информации выделяет цветовую информацию о зарядном устройстве, которая явно отличается от бытовой техники, хозяйственных предметов и окружающей обстановки на изображении, полученном с помощью блока 160 камеры, и сохраняет эту цветовую информацию в базе 171 данных графической информации. Цветовая информация может быть RGB значениями.
Кроме того, блок 152 сбора графической информации собирает информацию о форме зарядного устройства и сохраняет информацию о форме. Информация о форме зарядного устройства является информацией, которая описывает очертание объекта, то есть границы объекта соответствующего цвета на введенном изображении, и эта информация об очертании сохраняется. Информация о форме зарядного устройства используется для вычисления направления и определения положения зарядного устройства, когда чистящий робот возвращается к зарядному устройству.
Блок 153 вычисления положения зарядного устройства подает управляющий сигнал на блок 160 камеры в соответствии с сигналом запроса на подзарядку, полученным из цепи 180 индикации напряжения, сверяет графическую информацию о зарядном устройстве, введенную посредством блока 160 камеры, вычисляет направление, в котором расположено зарядное устройство, когда графическая информация существует, и выводит данные на блок 151 управления перемещением.
Когда цепь 180 индикации напряжения выводит сигнал запроса на подзарядку, в то время как чистящий робот подметает очищаемую поверхность, блок 153 вычисления положения зарядного устройства принимает сигнал запроса на подзарядку, полученный от цепи 180 индикации напряжения, и выводит управляющий сигнал на блок 160 камеры. Когда блок 160 камеры принимает управляющий сигнал, он обрабатывает изображение, полученное через линзы, и выводит обработанное изображение на блок 153 вычисления положения зарядного устройства. Блок 153 вычисления положения зарядного устройства ищет объект с цветом аналогичным цветовой информации о зарядном устройстве, которая хранится в базе 171 данных графической информации, на изображении, полученном от блока 160 камеры.
Кроме того, блок 153 вычисления положения зарядного устройства выделяет контур рассматриваемого объекта и сравнивает эту информацию о контуре с информацией о форме зарядного устройства. Когда выделенная информация о контуре аналогична цветовой информации или информации о форме зарядного устройства, блок 153 вычисления положения зарядного устройства подтверждает, что рассматриваемый объект является зарядным устройством, вычисляет направление, соответствующее положению, и выводит управляющий сигнал на блок 151 управления перемещением. Блок 151 управления перемещением управляет блоком 130 перемещения и заставляет чистящего робота вернуться к зарядному устройству.
В предпочтительном варианте осуществления настоящего изобретения, когда сигнал запроса на подзарядку принят от цепи 180 индикации напряжения, блок 153 вычисления положения зарядного устройства заставляет чистящего робота повернуться на 360° с заранее определенным интервалом, формирует сигнал управления поворотом для фотографирования внешнего изображения и подает сигнал управления поворотом на блок 151 управления перемещением. Таким образом, блок 151 управления перемещением управляет блоком 130 перемещения так, что чистящий робот поворачивается на 360° с заранее заданным интервалом, например с интервалом в 30°. Таким образом, блок 160 камеры делает фотографии всех изображений вокруг чистящего робота и передает сфотографированные изображения блоку 153 вычисления положения зарядного устройства, таким образом положение зарядного устройства и информация о направлении могут быть вычислены более эффективно.
На фиг.2 представлена блок-схема другого варианта осуществления чистящего робота, имеющего функцию автовозврата к зарядному устройству. Чистящий робот в соответствии с другим вариантом осуществления изобретения дополнительно содержит базу 181 данных информации об окружении для хранения информации об окружении зарядного устройства, полученной посредством блока 160 камеры. Кроме того, микропроцессор 150 дополнительно содержит блок 154 сбора информации об окружении для выделения информации об окружении зарядного устройства из изображения вокруг зарядного устройства, полученного посредством блока 160 камеры, и сохраняет эту информацию в базе 181 данных информации об окружении. Блок 153 вычисления положения зарядного устройства выделяет информацию об окружении из изображения, полученного посредством блока 160 камеры в соответствии с сигналом запроса на подзарядку, сравнивает выделенную информацию об окружении с информацией об окружении, хранящейся в базе 181 данных информации об окружении, вычисляет направление положения зарядного устройства и выводит управляющий сигнал на блок 151 управления перемещением так, что чистящий робот возвращается к зарядному устройству.
База 181 данных информации об окружении хранит информацию об окружении, такую как форма и положение соседнего объекта около зарядного устройства и информацию о положении зарядного устройства и объекта, которые выделяются из изображения вблизи зарядного устройства для чистящего робота.
Когда расстояние между чистящим роботом и зарядным устройством увеличивается, становится труднее выделять цветовую информацию и информацию о форме зарядного устройства из изображения, получаемого посредством блока 160 камеры. Таким образом, труднее точно вычислить положение и направление положения зарядного устройства. Следовательно, чистящий робот в соответствии с настоящим изобретением дополнительно содержит блок 154 сбора информации об окружении для поиска положения и направления положения зарядного устройства всякий раз, когда чистящий робот перемещается на каждое заранее определенное расстояние, а также для выделения информации об окружении зарядного устройства из изображения соседнего окружения зарядного устройства, полученного с помощью блока 160 камеры, в соответствии с исследуемыми положением и направлением, и сохранения выделенной информации об окружении в базе 181 данных об окружении.
Всякий раз, когда чистящий робот перемещается на каждое заранее определенное расстояние, блок 154 сбора информации об окружении сохраняет информацию об окружении, такую как форма и положение объекта соседнего окружения вблизи зарядного устройства, и информацию о положении зарядного устройства и объекта, извлеченных из изображения вокруг зарядного устройства, полученного путем управления блоком 160 камеры. Величина перемещения чистящего робота может вычисляться соответственно вращению колеса в качестве движущегося блока или подобным образом.
К примеру, в случае, когда хозяйственные предметы или неподвижные объекты, такие как углубление или орнамент рядом с зарядным устройством, измерены, блок 154 сбора информации об окружении сохраняет информацию об окружении, такую как форма и положение объекта соседнего окружения вокруг зарядного устройства, и информацию о положении зарядного устройства и объекта, выделенную из изображения вокруг зарядного устройства.
Блок 153 вычисления положения зарядного устройства извлекает информацию об окружении из изображения, полученного с помощью блока 160 камеры в соответствии с сигналом запроса на подзарядку, сравнивает эту информацию об окружении с информацией об окружении, хранящейся в базе 181 данных об окружении, вычисляет направление положения зарядного устройства и выводит управляющий сигнал на блок 151 управления перемещением, чтобы чистящий робот вернулся к зарядному устройству.
Следовательно, когда зарядное устройство и чистящий робот находятся близко друг к другу, чистящий робот вычисляет положение и направление положения зарядного устройства, используя графическую информацию о зарядном устройстве, и возвращается к зарядному устройству. Когда зарядное устройство и чистящий робот находятся далеко друг от друга, чистящий робот вычисляет положение и направление положения зарядного устройства, используя информацию об окружении зарядного устройства, и таким образом быстро возвращается к зарядному устройству.
На фиг.3 представлена блок-схема последовательности операций способа автовозврата чистящего робота в соответствии с предпочтительным вариантом осуществления настоящего изобретения к зарядному устройству. Способ автовозврата чистящего робота к зарядному устройству в соответствии с предпочтительным вариантом осуществления настоящего изобретения осуществляется следующим образом.
Сначала пользователь вводит управляющую команду для чистящего робота, который полностью заряжен в зарядном устройстве, например пользователь нажимает кнопку ввода, расположенную на чистящем роботе, или кнопку ввода, расположенную на пульте дистанционного управления, который предоставляется при покупке чистящего робота (S101), при этом чистящий робот принимает управляющую команду и откатывается от зарядного устройства. Камера, расположенная в заранее определенном положении чистящего робота, фотографирует изображение соответствующего зарядного устройства и выводит сфотографированное изображение на блок 152 сбора графической информации микропроцессора 150.
Блок 152 сбора графической информации выделяет цветовую информацию, такую как RGB значение, о зарядном устройстве или информацию о форме, такую как контур зарядного устройства, полученную с помощью блока 160 камеры, и сохраняет выделенную информацию в базе 171 данных графической информации (S103).
Когда микропроцессор 150 получает графическую информацию о зарядном устройстве посредством блока 152 сбора графической информации, он формирует управляющий сигнал на блок 151 управления перемещением и блок 110 всасывания для обнаружения и всасывания пыли и грязи на очищаемой площади, т.е. осуществляется очистка чистящим роботом от пыли и грязи (S105). Цепь 180 индикации напряжения чистящего робота измеряет напряжение на аккумуляторе 140 в течение каждого заранее определенного периода времени, а время автоматической подзарядки определяется путем детектирования уровня энергии, оставшейся в аккумуляторе 140. Цепь 180 индикации напряжения сравнивает замеренное напряжение с контрольным значением напряжения, хранящимся в памяти, и формирует сигнал запроса на подзарядку на блок 153 вычисления положения зарядного устройства, когда замеренное напряжение ниже, чем контрольное значение напряжения (S107).
Блок 153 вычисления положения зарядного устройства микропроцессора 150 принимает сигнал запроса на подзарядку и подает управляющий сигнал на блок 160 камеры (S109). В дополнение он подает управляющий сигнал на блок 151 управления перемещением так, что блок 160 камеры может получить изображение при повороте на 360° с заранее определенным интервалом. Таким образом, блок 151 управления перемещением управляет блоком 130 перемещения так, что чистящий робот поворачивается на 360° с заранее определенным интервалом, например 30° и таким образом блок 160 камеры фотографирует все изображения вокруг чистящего робота и передает сфотографированные изображения на блок 153 вычисления положения зарядного устройства (S111).
Блок 153 вычисления положения зарядного устройства сверяет графическую информацию о зарядном устройстве с изображением, полученным посредством блока 160 камеры (S113). При существовании соответствующей графической информации блок 153 вычисления положения зарядного устройства вычисляет направление, по которому расположено зарядное устройство, и выводит данные на блок 151 управления перемещением (S115, S117).
Когда расстояние между чистящим роботом и зарядным устройством увеличивается, то становится труднее выделять цветовую информацию и информацию о форме зарядного устройства из изображения, получаемого с помощью блока 160 камеры. Таким образом, трудно точно вычислить положение и направление положения зарядного устройства.
Чистящий робот в соответствии с другим вариантом осуществления настоящего изобретения дополнительно содержит блок 154 сбора информации об окружении для поиска положения и направления положения зарядного устройства всякий раз, когда чистящий робот перемещается на каждое заранее заданное расстояние, выделения информации об окружении зарядного устройства из изображения соседнего окружения зарядного устройства, полученного с помощью блока 160 камеры, в соответствии с исследуемыми положением и направлением, и сохранения выделенной информации об окружении в базе 181 данных об окружении. Таким образом, чистящий робот может точно и быстро вернуться с большого расстояния к зарядному устройству.
На фиг.4 представлена блок-схема последовательности операций способа автовозврата чистящего робота к зарядному устройству в соответствии с другим вариантом осуществления настоящего изобретения. Способ автовозврата чистящего робота к зарядному устройству в соответствии с другим вариантом осуществления настоящего изобретения осуществляется следующим образом.
Всякий раз, когда чистящий робот передвигается на каждое заранее заданное расстояние, например в соответствии с движением колес блока 130 перемещения, микропроцессор 150 ищет положение зарядного устройства посредством указанных выше операций (S201, S203) и передает управляющую команду на блок 160 камеры, чтобы получить искомое изображение вокруг зарядного устройства. Блок 160 камеры фотографирует изображение окружения, центрируя его относительно зарядного устройства, и выводит сфотографированное изображение на блок 154 получения изображения окружения (S205).
Блок 154 получения изображения окружения выделяет информацию об окружении, например форму и положение объекта окружения рядом с зарядным устройством и информацию о положении зарядного устройства и объекта, и сохраняет эту информацию в базе 181 данных информации об окружении (S207), при этом информация об окружении выделяется из изображения вокруг зарядного устройства для чистящего робота.
Например, в случае, когда хозяйственные предметы или неподвижные объекты, такие как углубление или орнамент рядом с зарядным устройством измерены, блок 154 сбора информации об окружении выделяет информацию об окружении, такую как форма и положение объекта соседнего окружения зарядного устройства, и информацию о положении зарядного устройства и объекта, сохраняет извлеченную информацию в базе 181 данных информации об окружении, при этом информация об окружении выделяется из изображения вокруг зарядного устройства.
Когда микропроцессор 150 получает информацию об окружении зарядного устройства посредством блока 154 сбора информации об окружении, он формирует управляющий сигнал на блок 151 управления перемещением и блок 110 всасывания для обнаружения и всасывания пыли и грязи на очищаемой площади, что обеспечивает очистку чистящим роботом от пыли и грязи. Цепь 180 индикации напряжения чистящего робота измеряет напряжение на аккумуляторе 140 в течение каждого заранее заданного периода времени, а время автоматической подзарядки определяется путем детектирования уровня энергии, оставшейся в аккумуляторе 140. Цепь 180 индикации напряжения сравнивает измеренное напряжение с контрольным значением напряжения, хранящимся в памяти, и подает сигнал запроса на подзарядку на блок 153 вычисления положения зарядного устройства, когда измеренное напряжение ниже, чем контрольное значение напряжения (S209).
Блок 153 вычисления положения зарядного устройства микропроцессора 150 принимает сигнал запроса на подзарядку и формирует управляющий сигнал на блок 160 камеры (S211). Кроме того, он подает управляющий сигнал на блок 151 управления перемещением так, что блок 160 камеры может получить изображение при повороте на 360° с заранее заданным интервалом. Таким образом, блок 151 управления перемещением управляет блоком 130 перемещения так, что чистящий робот поворачивается на 360° с заранее заданным интервалом, например 30°, таким образом блок 160 камеры фотографирует все изображения вокруг чистящего робота и передает сфотографированные изображения на блок 153 вычисления положения зарядного устройства (S213).
Блок 153 вычисления положения зарядного устройства сверяет графическую информацию о зарядном устройстве с изображением, полученным посредством блока 160 камеры (S215). Когда возникает соответствующая графическая информация (S217), блок 153 вычисления положения зарядного устройства вычисляет направление, в котором расположено зарядное устройство, и выводит данные на блок 151 управления перемещением (S223, S225).
Когда соответствующей графической информации не имеется (S217), блок 153 вычисления положения зарядного устройства ищет объект, который согласуется с информацией об окружении, такой как форма и положение объекта вокруг зарядного устройства, и информацией о расположении зарядного устройства и объекта, которая хранится в информации об окружении, полученной из изображения, заснявшего все изображения вокруг чистящего робота.
Когда объект согласуется с информацией об окружении в соответствии с найденным результатом (S221), то вычисляется направление положения, в котором расположено зарядное устройство, вычисляется, исходя из соответствующей информации об окружении (S223). Таким образом, блок 153 вычисления положения зарядного устройства формирует управляющий сигнал на блок управления перемещением так, что чистящий робот возвращается к зарядному устройству (S225).
Например, в случае, когда существует углубление возле зарядного устройства, блок 154 сбора информации об окружении сохраняет информацию об окружении в базе 181 данных информации об окружении, причем информация об окружении содержит цветовую информацию о соответствующем углублении, информацию о форме в виде информации о контуре соответствующего углубления и информацию о положении соответственно определению, сделанному в отношении углубления, расположенного в любом направлении зарядного устройства, полученную из изображения окрестности зарядного устройства, полученного посредством блока 160 камеры.
Когда сигнал запроса на подзарядку поступает из цепи 180 индикации напряжения, блок 153 вычисления положения зарядного устройства ищет углубление, которое согласуется с цветовой информацией о соответствующем углублении, информацией о форме, такой как информация о контуре соответствующего углубления, и информацией о положении, соответствующей определению, сделанному в отношении углубления, расположенного в любом направлении зарядного устройства, полученной из изображения окрестности зарядного устройства, полученного посредством блока 160 камеры. Кроме того, блок 153 вычисления положения зарядного устройства вычисляет направление, в котором расположено соответствующее зарядное устройство, и подает управляющий сигнал на блок 151 управления перемещением.
Как следует из вышесказанного, согласно настоящему изобретению создан чистящий робот, имеющий функцию автовозврата к зарядному устройству, при этом чистящий робот определяет направление и положение зарядного устройства, используя графическую информацию о зарядном устройстве, и таким образом точно и быстро возвращается к зарядному устройству для чистящего робота, а также создан способ его использования.
Когда расстояние между чистящим роботом и зарядным устройством невелико, чистящий робот вычисляет положение и направление положения зарядного устройства, используя графическую информацию о зарядном устройстве, и возвращается к зарядному устройству. Когда расстояние между чистящим роботом и зарядным устройством велико, чистящий робот вычисляет положение и направление положения зарядного устройства, используя информацию об окружении зарядного устройства, и таким образом быстро возвращается к зарядному устройству.
Хотя предпочтительные варианты осуществления настоящего изобретения были раскрыты для иллюстративных целей, специалистам в данной области техники будет ясно, что возможны различные модификации без выхода за рамки объема и сущности изобретения.



Изобретение относится к чистящему роботу, имеющему функцию автовозврата к зарядному устройству, и способу его использования. Чистящий робот содержит блок камеры для фотографирования внешнего изображения, блок памяти для хранения управляющей программы по перемещению чистящего робота, цепь индикации напряжения, микропроцессор для сохранения графической информации, получаемой посредством блока камеры, сбора информации о положении зарядного устройства из внешнего изображения на основе графической информации о зарядном устройстве при обнаружении сигнала обратной связи и возврата чистящего робота к зарядному устройству. Способ автовозврата чистящего робота к зарядному устройству заключается в сборе графической информации о зарядном устройстве из изображений и сохранении полученной графической информации о зарядном устройстве для чистящего робота, приеме информации об уровне энергии, оставшейся в аккумуляторе чистящего робота, формировании сигнала управления камерой, поиске графической информации о зарядном устройстве, формировании управляющего сигнала для возврата чистящего робота к зарядному устройству. Технический результат заключается в повышении точности определения зарядного устройства. 2 н. и 11 з.п. ф-лы, 4 ил.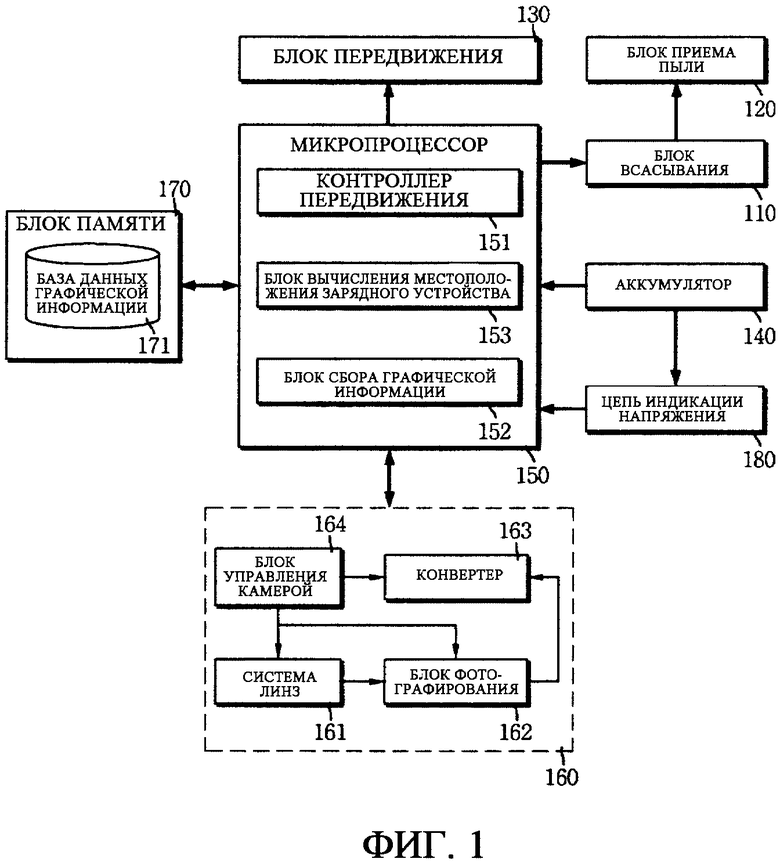
а) осуществляют сбор графической информации о зарядном устройстве из изображений, полученных посредством блока камеры, и сохраняют полученную графическую информацию о зарядном устройстве для чистящего робота,
b) осуществляют прием информации об уровне энергии, оставшейся в аккумуляторе чистящего робота, причем периодически измеряют уровень энергии, оставшейся в аккумуляторе,
c) формируют сигнал управления камерой для того, чтобы получить изображение окружения, когда уровень энергии, оставшейся в аккумуляторе, ниже заранее заданного значения,
d) осуществляют поиск графической информации о зарядном устройстве, собранной и сохраненной при выполнении этапа а) на изображении, полученном посредством блока камеры, подтверждают положение зарядного устройства, и формируют управляющий сигнал для возврата чистящего робота к зарядному устройству.
e) сбор информации о ближайшем окружении зарядного устройства из изображения, полученного посредством блока камеры, всякий раз, когда чистящий робот перемещается на заранее заданное расстояние, и сохраняют собранную информацию об окружении, при этом на этапе d) дополнительно осуществляют выделение информации об окружении из изображения, полученного посредством блока камеры, сравнение выделенной информации об окружении с информацией об окружении, полученной и сохраненной при выполнении этапа е), вычисление направления положения, в котором расположено зарядное устройство, формирование управляющего сигнала для возврата чистящего робота к зарядному устройству.
| ЧИСТЯЩИЙ РОБОТ, СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО И СПОСОБ ВОЗВРАЩЕНИЯ ЧИСТЯЩЕГО РОБОТА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2001 |
|
RU2218859C2 |
| DE 10351767 A1, 26.08.2004 | |||
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |

