Изобретение относится к измерительной технике и может применяться при изготовлении и контроле параметров микромеханических датчиков (ММД): акселерометров, гироскопов, датчиков давления, резонаторов, микрозеркал и т.п. Предлагаемый способ предназначен для контроля рабочего зазора между чувствительным элементом (ЧЭ) и электродами систем съема перемещений и электростатического привода, применяемых в ММД. Способ применяется в технологическом процессе изготовления ММД на этапе сборки перед посадкой ЧЭ в корпус.
К известным прямым способам контроля зазора можно отнести оптический контроль, имеющий ряд существенных недостатков: не доступен для контроля рабочего зазора в структурах типа "сэндвич", непроизводителен при массовом изготовлении;
рентгеновский контроль - непроизводителен при массовом изготовлении [1, 2].
Известен способ контроля зазора, основанный на измерении емкости [3]. Однако прямые методы измерения емкостей в системе "упругий подвес-электроды" обладают большой погрешностью из-за наличия паразитных емкостей, сопоставимых по величине с величиной номинальной емкости (емкости между ЧЭ и электродом). Это приводит к существенной погрешности определения зазора, поскольку погрешности измерения номинальной емкости прямым методом могут достигать нескольких десятков или даже сотен процентов вследствие.
Целью изобретения является повышение точности измерения рабочего зазора в системе "упругий подвес-электроды".
Для достижения поставленной цели предлагается способ, заключающийся в первоначальном измерении величины электрической емкости между чувствительным элементом (ЧЭ) упругого подвеса и электродом, перемещении ЧЭ в упругом подвесе до его касания с основанием, на котором расположен электрод, измерении величины указанной емкости в этом положении, вычислении величины рабочего зазора по следующему соотношению:

где h0 - рабочий зазор, l - длина электрода, L - расстояние от оси торсионов упругого подвеса до края электрода, ε - коэффициент диэлектрической проницаемости; ε0 - электрическая постоянная; b - ширина чувствительного элемента, Сном из - измеренная величина электрической емкости между чувствительным элементом и электродом в положении устойчивого равновесия, Смин из - измеренная величина электрической емкости между чувствительным элементом и электродом в положении касания чувствительного элемента с основанием.
Соотношение (1) для определения зазора предлагаемым способом получается следующим образом.
На фиг.1 показана типовая система "упругий подвес-электроды", используемая в микромеханических датчиках и представляющая собой ЧЭ, подвешенный с помощью упругих элементов с зазором h0 над системой электродов С11, С12, С21, С22, которые в свою очередь расположенны на статорной подложке.
Рассмотрим работу ММД в режиме электростатического двигателя. Плавное увеличение напряжения на любом из электродов приводит к плавному увеличению угла отклонения ЧЭ (фиг.1), происходящему за счет притягивающих пондеромоторных сил, возникающих в электростатическом поле между ЧЭ и электродом. При достижении некоторого критического значения угла происходит опрокидывание ЧЭ на статорную подложку. Электростатический момент силы может быть представлен следующим соотношением:

где U - управляющее напряжение, l - длина обкладки конденсатора (l=l1 или l=l2), L - расстояние от оси торсионов до края обкладки электрода (L=L1 или L=L2), ε - коэффициент диэлектрической проницаемости; ε0 - электрическая постоянная; b - ширина чувствительного элемента, α - угол поворота чувствительного элемента (ЧЭ).
Момент упругой силы торсионов при повороте ЧЭ на угол α определяется зависимостью: Mмех=кα.
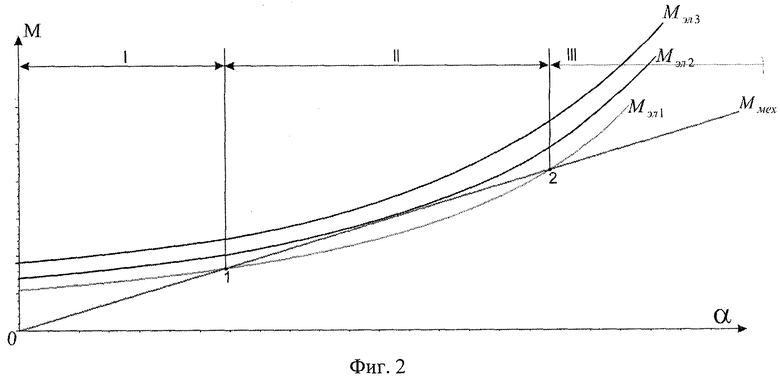
На фиг.2 представлены функциональные зависимости Мэл, Mмех от угла α. В силу того, что электростатический момент Мэл возрастает на всем допустимом диапазоне значений α и не имеет точек перегибов, а механический момент Ммех линейно зависит от угла α, возможны три случая взаимного расположения графиков электростатического и механического моментов: графики электростатического момента и механического момента имеют две точки пересечения; одну точку пересечения (график механического момента является касательной к графику электростатического момента); не пересекаются. Рассмотрим каждый из трех случаев отдельно.
В случае двух точек пересечения точки 1 и 2 определяют пересечения графиков функций электростатического и механического моментов и являются положением равновесия. Разобьем абрисами точек 1 и 2 ось α, на три зоны (условно обозначим зоны I, II, III). Из фиг.2 видно, что в зоне I выполняется условие |Mэл 1|>|Ммех|, для зоны II |Мэл 1|<|Ммех|, для зоны III |Мэл 1|>|Ммех|. Отмечая, что механический момент возвращает ЧЭ в нейтральное положение, а электростатический момент выводит подвижную систему МП из данного положения, заключаем, что зоны I, II - устойчивые зоны, а III - неустойчивая зона. Следовательно, точка 1 - точка устойчивого положения равновесия, а точка 2 - точка неустойчивого положения равновесия. Таким образом, в случае если графики электростатического момента и механического момента имеют две точки пересечения, то вторая точка пересечения определяет границу устойчивости. В случае одной точки пересечения (из фиг.2) видно, что до точки касания графиков выполняется условие |Мэл 2|>|Ммех|, после точки пересечения графиков |Мэл 2|<|Ммех|. Следовательно, точка пересечения графиков - точка неустойчивого положения равновесия и система не имеет зон устойчивости. В том случае, если графики не пересекаются (фиг.2), видно, что |Мэл 3|>|Ммех|. Следовательно, система не имеет зон устойчивости. Выражение (2) представляет собой квадратичную зависимость от напряжения U, поэтому при его увеличении меняется положение графика Мэл(α). Это приводит к сближению точек пересечения графиков электростатического и механического моментов (точки 1 и 2, см. фиг.4), при некотором критическом напряжении U точки 1 и 2 сливаются, что приводит к потере устойчивости и опрокидыванию ЧЭ на статорную обкладку. Данный эффект может быть использован для измерения номинального значения емкости.
Емкость, образованная ЧЭ и электродом, определяется следующей зависимостью:

Номинальная величина емкости при α=0 определяется так:
В случае поворота ЧЭ на максимальный угол αmax=h0/L из (3) получаем соотношение для определения минимальной емкости:

Отношение разности номинальной и минимальной емкостей к номинальной емкости для фиксированной геометрии обкладок будет постоянным числом, не зависящим от зазора и от ширины обкладки.

Измерение и расчет номинального значения емкости проводятся в два этапа. На первом этапе измеряется значение емкости Сном из без подачи управляющего напряжения на электрод. На втором - подается достаточное для опрокидывания ЧЭ напряжение на симметричный измеряемому электрод, измеряется значение емкости Смин из. Следует отметить, что измеренные значения емкостей Сном из и Смин из состоят из Сном из=Сном+Сnap, Cмин из=Смин+Сnap, где Сnap - паразитная емкость, состоящая из емкостей подводящих проводов, контактных площадок и других элементов конструкции датчика. Однако разность измеренных емкостей Сном из-Смин из будет равна разности действительных значений емкостей Сном-Смин. В этом случае истинное значение номинальной емкости, в соответствии с зависимостью (6), рассчитывается по формуле:
Используя (4), (7), получаем соотношение (1) для вычисления величины зазора h0 между ЧЭ и электродом.
Таким образом, предлагаемый способ позволяет определять величины номинальных емкостей, образованных ЧЭ и электродами систем съема перемещений и электростатического привода в процессе сборки ММД перед посадкой его в корпус и дальнейшей герметизацией, а также контролировать величины рабочих зазоров между ними. Способ применяется в МИЭТ на кафедре микроэлектроники для контроля емкостей ММД, величина которых находится в пределах 0,2÷10 пФ (величина паразитных емкостей составляет при этом 2,5÷6 пФ), а также рабочих зазоров с величинами порядка 3÷30 мкм. Погрешность измерения номинальных емкостей и рабочих зазоров не превышает при этом ±9%.
Источники информации
1. Измерение параметров полупроводниковых материалов и структур / В.В.Батавин, Ю.А.Концевой, Ю.В.Федорович. М.: Радио и связь, 264 с., ил. 20, 1985.
2. Методы исследования и контроля чистоты поверхности материалов электронной техники: [Учеб. пособие] / А.И.Бутурлин, И.Э.Голубская, Ю.Д.Чистяков; Моск. ин-т электрон. техники. М.: МИЭТ, 91 с., ил. 20, 1989.
3. Былинкин С.Ф., Вавилов В.Д., Миронов С.Г. Преобразователь перемещений. Патент РФ №2279632, 2004.06.15 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЖЕСТКОСТИ УПРУГОГО ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2006 |
|
RU2324917C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2296390C1 |
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2025 |
|
RU2840118C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ ИЗМЕРЕНИЯ НИЗКОГО АБСОЛЮТНОГО ДАВЛЕНИЯ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2749644C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ЭЛЕКТРОДАМИ И ПОДВИЖНОЙ МАССОЙ МИКРОМЕХАНИЧЕСКОГО УСТРОЙСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2338997C2 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
Изобретение относится к измерительной технике. Сущность: определяют зазор на основе измерения электрической емкости между чувствительным элементом упругого подвеса и электродом. Первоначально измеряется величина электрической емкости между чувствительным элементом упругого подвеса и электродом в исходном положении чувствительного элемента. Затем чувствительный элемент перемещается до касания с его основанием, на котором расположен электрод, в этом положении снова измеряется величина указанной емкости, а величина рабочего зазора вычисляется по соотношению. Технический результат: повышение точности измерения. 1 з.п. ф-лы, 2 ил.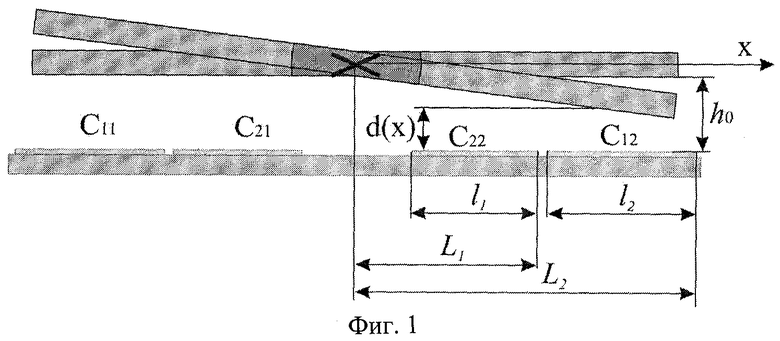
где h0 - рабочий зазор, l - длина электрода, L - расстояние от оси торсионов упругого подвеса до края электрода, ε - коэффициент диэлектрической проницаемости; ε0 - электрическая постоянная; b - ширина чувствительного элемента, Сном из - измеренная величина электрической емкости между чувствительным элементом и электродом в положении устойчивого равновесия,
Смин из - измеренная величина электрической емкости между чувствительным элементом и электродом в положении касания чувствительного элемента с основанием.
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2279632C2 |
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАДИАЛЬНО-ОСЕВЫХ ЗАЗОРОВ В ТУРБОМАШИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2280238C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ИЗМЕРИТЕЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ И КОНТРОЛИРУЕМОЙ ПОВЕРХНОСТЬЮ (ВАРИАНТЫ) | 2003 |
|
RU2234054C1 |
| US 2004251916 A1, 16.12.2004. | |||

