Заявляемое изобретение относится к способам автоматического управления пространственным маневрированием самолета, в частности к способам управления самолетом в режиме выведения в горизонтальный полет.
Известны способы автоматического управления полетом высокоманевренного самолета, предусматривающие, с целью повышения безопасности полета, например при потере летчиком пространственной ориентации, выведение самолета в горизонтальный полет с перегрузкой, не превышающей допустимого значения. Подобные способы описаны, в частности, в заявке RU 94008717 A1, B64C 13/18; патенте RU 2025412 С1, В64С 13/18 и Руководстве по технической эксплуатации САУ-451-05СМТ.
К недостаткам известных способов автоматического управления, осуществляющих приведение самолета в режим горизонтального полета, следует отнести тот факт, что при включении данного режима при больших вертикальных скоростях время переходного процесса в системе достаточно велико и составляет 40-60 сек. В течение этого времени на самолет воздействуют небольшие по величине относительные нормальные перегрузки, равные - 0,8 ед., что может привести к нарушению работы силовой установки, остановке двигателей и созданию тем самым аварийной ситуации.
Наиболее близким по технической сущности к заявляемому способу является способ автоматического управления полетом высокоманевренного самолета, представленный в руководстве по технической эксплуатации САУ-451-05СМТ для самолета МИГ-29СМТ, предусматривающий выведение самолета в горизонтальный полет посредством независимого управления продольным и боковым каналами системы автоматического управления без использования автомата тяги.
Согласно данному способу для выведения самолета в горизонтальный полет определяют параметры движения самолета, такие как текущие значения нормальной перегрузки, угловой скорости тангажа и вертикальной скорости, формируют сигнал заданной нормальной перегрузки, пропорциональный вертикальной скорости самолета, причем величина заданной нормальной перегрузки не должна превышать допустимого значения, определяемого из условий прочности самолета и нормальной работы двигательной установки. Сигналы, соответствующие текущим значениям нормальной перегрузки и угловой скорости тангажа, и сигнал заданной нормальной перегрузки подают в продольный канал системы автоматического управления (САУ), под воздействием которых исполнительный механизм отклоняет органы продольного управления самолета.
Определяют также текущие значения угла крена и угловой скорости крена и на их основе формируют сигнал управления с учетом того, что сигнал заданного угла крена должен быть равен нулю. Сформированный сигнал подают в боковой канал САУ, под воздействием которого исполнительный механизм отклоняет органы бокового управления самолета.
При углах крена по абсолютной величине меньших или равных 80° управление осуществляют одновременно в продольном и боковом каналах, а при углах крена больших 80° - только в боковом канале.
Недостатком известного способа управления является то, что время приведения самолета в горизонтальный полет слишком большое, связано это с тем, что режим выполняется в ряде случаев с малыми по величине отрицательными перегрузками и всегда в направлении наименьшего угла крена, хотя в ряде случаев, при больших угловых скоростях крена, целесообразнее приводить самолет в горизонтальный полет через больший по значению угол крена, кроме того, при включении данного режима при кабрировании существенно снижается и может стать меньше предельно допустимой приборная скорость самолета, а при пикировании она может превысить максимально допустимые значения, что снижает безопасность полета.
Целью изобретения является повышение безопасности полета за счет существенного уменьшения времени приведения самолета в режим горизонтального полета и снижения вероятности полета самолета в области, не соответствующей предельно допустимым значениям приборной скорости.
Поставленная цель достигается за счет того, что согласно предлагаемому способу автоматического управления полетом высокоманевренного самолета, для выведения самолета в горизонтальный полет определяют параметры движения самолета, такие как текущие значения нормальной перегрузки, угловой скорости тангажа и вертикальной скорости, угла крена и угловой скорости крена, формируют сигнал заданной нормальной перегрузки, пропорциональный произведению сигналов, соответствующих вертикальной скорости и абсолютной величине текущего значения угла крена, причем этот сигнал при углах крена по абсолютной величине меньших 80° должен быть отрицательным, при углах крена от 80° до 100° должен быть равен нулю, а при углах крена по абсолютной величине больших 100° должен быть положительным. Сформированный сигнал заданной нормальной перегрузки и сигналы, соответствующие текущим значениям нормальной перегрузки и угловой скорости тангажа, подают в продольный канал системы автоматического управления, под воздействием которых исполнительный механизм отклоняет органы продольного управления самолета. Формируют также сигнал заданного значения угла крена, пропорциональный вертикальной скорости, с учетом знака угла крена в момент включения режима выведения самолета в горизонтальный полет, если в этот момент сумма сигналов, соответствующих значению текущего угла крена и значению текущей угловой скорости крена, не превышала по абсолютной величине сигнал, соответствующий углу крена 180°, в противном случае знак сигнала, соответствующего заданному значению угла крена, меняют на противоположный. Сформированный сигнал заданного угла крена и сигналы, соответствующие текущим значениям угла крена и угловой скорости крена, подают в боковой канал системы автоматического управления, под воздействием которых исполнительный механизм отклоняет органы бокового управления самолета. Кроме того, в момент включения режима выведения самолета в горизонтальный полет принудительно включают в контур управления автомат тяги, посредством которого управляют приборной скоростью.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема системы, реализующей заявляемый способ автоматического управления полетом высокоманевренного самолета в режиме выведения его в горизонтальный полет.
Система содержит блок 1 датчиков текущих параметров движения самолета, вычислитель 2 заданного значения нормальной перегрузки, продольный 3 канал САУ, вычислитель 4 заданного значения угла крена, боковой канал 5 САУ, устройство 6 принудительного включения автомата 7 тяги. Сигналы блока 1 датчиков текущих значений параметров движения самолета, а именно сигнал нормальной перегрузки и угловой скорости тангажа, подают в продольный канал 3 САУ. Сигналы датчиков угла крена и вертикальной скорости подают в вычислитель 2 заданного значения нормальной перегрузки. В данном вычислителе формируют сигнал, пропорциональный произведению сигнала вертикальной скорости и сигнала, зависящего от абсолютной величины угла крена, причем при малых по абсолютной величине углах крена, меньше 80°, этот сигнал должен быть отрицательным, при значениях от 80° до 100° - нулевым, а при больших по абсолютной величине углах крена, больше 100°, - положительным. Таким образом, в вычислителе 2 заданного значения нормальной перегрузки формируют знакопеременный управляющий сигнал, поступающий в продольный канал 3 САУ, при этом при выведении самолета в режим горизонтального полета в продольной плоскости представляется возможность управлять нормальной перегрузкой изменением сигнала крена в боковом канале, то есть в каком-то смысле обеспечить, с точки зрения быстродействия системы, оптимальное управление нормальной перегрузкой самолета. Под воздействием управляющих сигналов нормальной перегрузки ny, угловой скорости тангажа ωz и сигнала, сформированного вычислителем 2 заданного значения нормальной перегрузки ny зад., поступающих в продольный канал 3 САУ, осуществляют управление самолетом в продольной плоскости. Сигналы угла γ и угловой скорости ωх крена подают в боковой канал 5 САУ и в вычислитель 4. В вычислителе 4 на основании сигналов вертикальной скорости Vy, угла γ и угловой скорости ωx крена формируют управляющий сигнал γзад. заданного значения угла крена, величина которого пропорциональна вертикальной скорости полета, а знак определяется знаком угла крена в момент включения режима, если в этот момент сумма сигналов, соответствующих значению текущего угла крена и значению текущей угловой скорости, не превышала по абсолютной величине сигнал, соответствующий углу крена 180°, в противном случае знак сигнала, соответствующего заданному значению угла крена, меняют на противоположный. Таким образом, в зависимости от величины вертикальной скорости выбирается оптимальный с точки зрения минимизации времени переходного процесса управляющий сигнал заданного значения угла крена.
Под воздействием управляющего сигнала вычислителя 4 заданного значения угла крена и сигналов блока 1 датчиков угла и угловой скорости крена, поступающих в боковой канал 5 САУ, происходит управление самолетом в боковой плоскости.
Кроме того, устройством 6 принудительного включения вводят в управление автомат 7 тяги двигателей, с помощью которого управляют приборной скоростью самолета. Введение в управление автомата тяги позволяет существенно расширить полетную область, в которой выведение самолета в горизонтальный полет не приводит к уменьшению приборной скорости с выходом за предельно допустимые значения, тем самым повышается безопасность полета.
Для реализации заявляемого способа автоматического управления полетом высокоманевренного самолета не требуется специального оборудования. В состав блока датчиков могут входить стандартные датчики угла и угловой скорости, выпускаемые промышленностью. Функции вычислителей могут быть реализованы с помощью БЦВМ или с использованием аналоговых устройств, например, сложения, умножения, логических устройств. В качестве устройства принудительного включения автомата тяги двигателей может использоваться кнопка на ручке управления летчика.
Как показали результаты моделирования комплексной системы управления КСУ-35 для самолета СУ-35, при использовании данного способа автоматического управления пространственным маневрированием самолета время приведения самолета в горизонтальный полет при больших вертикальных скоростях уменьшилось до 10-15 секунд и существенно расширилась полетная область, при которой можно безопасно включать режим выведения самолета в горизонтальный полет. Следует отметить, что при использовании предлагаемого способа управления при начальной приборной скорости 450 км/ч и кабрировании с вертикальной скоростью 360 км/ч приборная скорость уменьшилась на 100 км/ч, а при использовании известного способа, выбранного в качестве прототипа, - на 200 км/ч.
Таким образом, предлагаемый способ реализуем и применим, в частности, для высокоманевренных самолетов типа СУ-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2325305C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2007 |
|
RU2339540C1 |
| Способ коррекции гировертикали по углу атаки | 2022 |
|
RU2790548C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2446429C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2459230C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2007 |
|
RU2340510C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
Изобретение относится к области автоматического управления пространственным маневрированием самолета, в частности к управлению самолетом в режиме выведения в горизонтальный полет. Способ предусматривает перекрестное управление продольным и боковым каналами системы автоматического управления. Для этого сигнал заданной нормальной перегрузки формируют как сигнал, пропорциональный произведению сигналов, соответствующих вертикальной скорости и абсолютной величине текущего угла крена. Этот сигнал при углах крена, по абсолютной величине меньших 80°, принимают отрицательным, при углах крена от 80° до 100° - равным нулю, а при углах крена, по абсолютной величине больших 100°, - положительным. Сигнал заданного значения угла крена формируют как сигнал, пропорциональный вертикальной скорости, со знаком, соответствующим знаку угла крена в момент включения режима выведения самолета в горизонтальный полет, если в этот момент сумма сигналов, соответствующих значению текущего угла крена и значению текущей угловой скорости крена, не превышала по абсолютной величине сигнал, соответствующий углу крена 180°. В противном случае знак сигнала, соответствующего заданному значению угла крена, меняют на противоположный. Кроме того, в момент включения режима выведения самолета в горизонтальный полет принудительно включают в контур управления автомат тяги, посредством которого управляют приборной скоростью. Способ позволяет повысить безопасность полета за счет уменьшения времени приведения самолета в режим горизонтального полета и снижения вероятности полета в области, не соответствующей предельно допустимым значениям приборной скорости. 1 ил.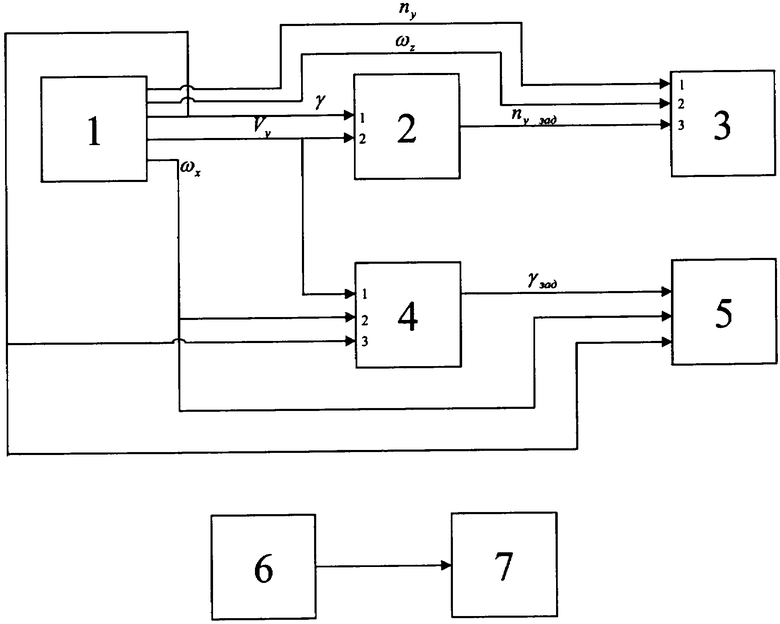
Способ автоматического управления полетом высокоманевренного самолета, при котором для выведения самолета в горизонтальный полет определяют параметры движения самолета такие, как текущие значения нормальной перегрузки, угловой скорости тангажа и вертикальной скорости, угла крена и угловой скорости крена, формируют сигнал заданной нормальной перегрузки и заданного угла крена, сформированный сигнал заданной нормальной перегрузки и сигналы, соответствующие текущим значениям нормальной перегрузки и угловой скорости тангажа, подают в продольный канал системы автоматического управления, под воздействием которых исполнительный механизм отклоняет органы продольного управления самолета, сформированный сигнал заданного угла крена и сигналы, соответствующие текущим значениям угла крена и угловой скорости крена, подают в боковой канал системы автоматического управления, под воздействием которых исполнительный механизм отклоняет органы бокового управления самолета, отличающийся тем, что сигнал заданной нормальной перегрузки формируют как сигнал, пропорциональный произведению сигналов, соответствующих вертикальной скорости и абсолютной величине текущего угла крена, причем этот сигнал при углах крена, по абсолютной величине меньших 80°, принимают отрицательным, при углах крена от 80 до 100° - равным нулю, а при углах крена, по абсолютной величине больших 100°, - положительным, сигнал заданного значения угла крена формируют как сигнал, пропорциональный вертикальной скорости, со знаком, соответствующим знаку угла крена в момент включения режима выведения самолета в горизонтальный полет, если в этот момент сумма сигналов, соответствующих значению текущего угла крена и значению текущей угловой скорости крена, не превышала по абсолютной величине сигнал, соответствующий углу крена 180°, в противном случае знак сигнала, соответствующего заданному значению угла крена, меняют на противоположный, кроме того, в момент включения режима выведения самолета в горизонтальный полет принудительно включают в контур управления автомат тяги, посредством которого управляют приборной скоростью.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1988 |
|
RU2025412C1 |
| RU 94008717 A1, 27.11.1995 | |||
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |

