Изобретение относится к области автоматического управления пространственным маневрированием самолета, в частности к системам управления самолетом, реализующим режим выведения самолета в горизонтальный полет.
Известны системы автоматического управления полетом высокоманевренного самолета, позволяющие, с целью повышения безопасности полета, например при потере летчиком пространственной ориентации, осуществлять выведение самолета в горизонтальный полет с перегрузкой, не превышающей допустимого значения. Подобные системы описаны, в частности, в заявке RU 94008717 A1, B64C 13/18; патенте RU 2025412 С1, B64C 13/18 и в Руководстве по технической эксплуатации САУ-451-05СМТ для самолета МИГ-29СМТ.
К недостаткам известных систем автоматического управления, осуществляющих выведение самолета в режим горизонтального полета, следует отнести тот факт, что при включении данного режима при больших вертикальных скоростях время переходного процесса в системе достаточно велико и составляет ˜40-60 с. В течение этого времени на самолет воздействуют небольшие по величине относительные нормальные перегрузки, равные -0,8 ед., что может привести к нарушению работы силовой установки, остановке двигателей и созданию, тем самым, аварийной ситуации.
Наиболее близкой по технической сущности к заявляемой системе является система автоматического управления для самолета МИГ-29СМТ, представленная в руководстве по технической эксплуатации САУ-451-05СМТ, позволяющая осуществлять выведение самолета в горизонтальный полет посредством независимого управления продольным и поперечным каналами.
Данная система автоматического управления полетом высокоманевренного самолета содержит блок датчиков, автомат продольного управления, первый и второй входы которого соединены соответственно с выходами блока датчиков по сигналу нормальной перегрузки и по сигналу угловой скорости тангажа, исполнительный механизм продольного управления, автомат поперечного управления, первый и второй входы которого соединены с выходами блока датчиков соответственно по сигналу угла крена и угловой скорости крена, исполнительный механизм поперечного управления и устройство включения режима выведения самолета в горизонтальный полет, выход которого подключен к третьим входам автоматов продольного и поперечного управления.
Недостатком известной системы является то, что при включении режима выведения самолета в горизонтальный полет при больших вертикальных скоростях время выведения самолета в горизонтальный полет слишком большое. Это связано с тем, что при углах крена, больших по абсолютной величине 80°, управление осуществляется только в боковой плоскости, а при углах крена, меньших 80°, в управление включается продольный канал. Причем при больших вертикальных скоростях режим выполняется с малыми по величине отрицательными нормальными перегрузками, выбранными из условия прочности самолета и нормальной работы двигательной установки. При этом в боковом канале управление всегда осуществляется в направлении наименьшего по значению угла крена, хотя в ряде случаев, при больших угловых скоростях крена, целесообразнее выводить самолет в горизонтальный полет через больший по значению угол крена. Кроме того, в случае включения данного режима при кабрировании существенно снижается и может стать меньше предельно допустимой приборная скорость самолета, а при пикировании она может превысить максимально допустимые значения, что снижает безопасность полета.
Целью настоящего изобретения является повышение безопасности полета путем существенного уменьшения времени выведения самолета в горизонтальный полет и снижения вероятности выхода самолета за область предельно допустимых значений приборной скорости.
Поставленная цель достигается за счет того, что в систему автоматического управления полетом высокоманевренного самолета, содержащую блок датчиков, автомат продольного управления, первый и второй входы которого соединены соответственно с выходами блока датчиков по сигналу нормальной перегрузки и по сигналу угловой скорости тангажа, исполнительный механизм продольного управления, автомат поперечного управления, первый и второй входы которого соединены с выходами блока датчиков соответственно по сигналу угла крена и угловой скорости крена, исполнительный механизм поперечного управления и устройство включения режима выведения самолета в горизонтальный полет, выход которого подключен к третьим входам автоматов продольного и поперечного управления, дополнительно введены последовательно соединенные первое устройство выделения модуля, первый функциональный блок и первое множительное устройство, последовательно соединенные второй функциональный блок и второе множительное устройство, последовательно соединенные первое запоминающее устройство, устройство определения знака и инвертор, последовательно соединенные второе запоминающее устройство, сумматор, второй вход которого соединен с выходом первого запоминающего устройства, второе устройство выделения модуля и устройство сравнения, блок коммутации и автомат тяги двигателей, причем входы первого устройства выделения модуля и первого запоминающего устройства соединены с выходом блока датчиков по сигналу угла крена, второй вход первого множительного устройства и вход второго функционального блока соединены с выходом блока датчиков по сигналу вертикальной скорости, вход второго запоминающего устройства соединен с выходом блока датчиков по сигналу угловой скорости крена, выходы первого и второго множительных устройств подключены к четвертым входам соответственно автомата продольного и автомата поперечного управления, выход устройства определения знака и выходы инвертора и устройства сравнения через блок коммутации подключены ко второму входу второго множительного устройства, а вход автомата тяги двигателей соединен с выходом устройства включения режима выведения самолета в горизонтальный полет.
Первый функциональный блок системы выполнен с возможностью определения соответствия входных сигналов тому или иному диапазону углов крена самолета и формирования на их основе выходного сигнала таким образом, чтобы при углах крена по абсолютной величине, меньших 80°, он был отрицательным, в диапазоне от 80° до 100° - равным нулю и при углах крена по абсолютной величине, больших 100°, - положительным.
Второй функциональный блок системы выполнен с возможностью определения соответствия входных сигналов тому или иному диапазону вертикальных скоростей и формирования на их основе выходного сигнала таким образом, чтобы при вертикальных скоростях, меньших 15 м/с, он был равен нулю, в диапазоне вертикальных скоростей от 15 м/с до 60 м/с - пропорционален текущему значению вертикальной скорости, а при вертикальных скоростях, больших 60 м/с, - равен величине, соответствующей вертикальной скорости 60 м/с, для формирования при этом сигнала заданного значения угла крена, соответствующего 180°.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема заявляемой системы автоматического управления высокоманевренным самолетом.
Система содержит блок 1 датчиков, автомат 2 продольного управления, исполнительный механизм 3 продольного управления, последовательно соединенные первое устройство 4 выделения модуля, первый функциональный блок 5 и первое множительное устройство 6, причем вход первого устройства 4 выделения модуля соединен с выходом блока 1 датчиков по сигналу угла крена, выходы которого по сигналам нормальной перегрузки и угловой скорости тангажа подключены соответственно к первому и второму входам автомата 2 продольного управления.
Система содержит также автомат 7 поперечного управления, исполнительный механизм 8 поперечного управления, последовательно соединенные второй функциональный блок 9 и второе множительное устройство 10, последовательно соединенные первое запоминающее устройство 11, устройство 12 определения знака и инвертор 13, последовательно соединенные второе запоминающее устройство 14, сумматор 15, второе устройство 16 выделения модуля и устройство 17 сравнения. Второй вход первого множительного устройства 6 и вход второго функционального блока 9 соединены с выходом блока 1 датчиков по сигналу вертикальной скорости. Первый вход автомата 7 поперечного управления и вход первого запоминающего устройства 11 соединены с выходом блока 1 датчиков по сигналу угла крена. Второй вход автомата 7 поперечного управления и вход второго запоминающего устройства 14 соединены с выходом блока 1 датчиков по сигналу угловой скорости крена. Выход первого запоминающего устройства 11 подключен ко второму входу сумматора 15. Выход устройства 12 определения знака и выходы инвертора 13 и устройства 17 сравнения через блок 18 коммутации подключены ко второму входу второго множительного устройства 10. Выход устройства 19 включения режима выведения самолета в горизонтальный полет подключен к третьим входам автоматов 2 и 7 продольного и поперечного управления, четвертые входы которых соединены соответственно с выходами первого и второго множительных устройств 6 и 10, и к автомату 20 тяги двигателей.
Сигналы с блока 1 датчиков, соответствующие нормальной перегрузке и угловой скорости тангажа, поступают непосредственно в автомат 2 продольного управления, а сигнал, соответствующий углу крена, поступает на вход первого устройства 4 выделения модуля, откуда сигнал, соответствующий абсолютному значению угла крена, передается в первый функциональный блок 5. Функциональный блок 5 формирует на своем выходе сигнал таким образом, чтобы при углах крена по абсолютной величине, меньших 80°, он был отрицательным, в пределах от 80° до 100°, - равным нулю, а при углах крена по абсолютной величине, больших 100°, - положительным. Сформированный сигнал, зависящий от абсолютной величины угла крена, поступает в множительное устройство 6, где перемножается с сигналом, соответствующим вертикальной скорости. Сигнал, соответствующий полученному произведению, поступает в автомат 2 продольного управления и является сигналом, соответствующим заданному значению нормальной перегрузки. При поступлении в автомат 2 продольного управления сигнала от устройства 19 включения режима выведения самолета в горизонтальный полет в нем формируется управляющий сигнал, под воздействием которого исполнительный механизм 3 осуществляет управление самолетом в продольной плоскости.
Сигнал с блока 1 датчиков, соответствующий углу крена, поступает также на первый вход автомата 7 поперечного управления и на вход первого запоминающего устройства 11. Сигнал, соответствующий угловой скорости крена, поступает на второй вход автомата 7 поперечного управления и на вход второго запоминающего устройства. Сигнал, соответствующий вертикальной скорости, поступает на вход второго функционального блока 9, где формируется выходной сигнал таким образом, чтобы при вертикальных скоростях, меньших 15 м/с, он был равен нулю, в диапазоне вертикальных скоростей от 15 м/с до 60 м/с - пропорционален текущему значению вертикальной скорости, а при вертикальных скоростях, больших 60 м/с, - равен величине, соответствующей вертикальной скорости 60 м/с, для формирования при этом сигнала заданного значения угла крена, соответствующего 180°. Данный сигнал с выхода функционального блока 9 поступает на первый вход второго множительного устройства 10. Сигналы, соответствующие углу крена и угловой скорости крена в момент включения режима выведения самолета в горизонтальный полет, с запоминающих устройств 11 и 14 поступают на сумматор 15. В устройстве 16 выделения модуля формируется сигнал, соответствующий абсолютному значению суммы данных сигналов, который в устройстве 17 сравнивается с сигналом, соответствующим углу крена 180°. Если сумма сигналов, соответствующих текущему значению угла крена и текущему значению угловой скорости крена в момент включения режима выведения самолета в горизонтальный полет, не превышает по абсолютной величине сигнала, соответствующего углу крена 180°, то через блок коммутации 18 на второй вход второго множительного устройства 10, формирующего сигнал заданного угла крена, поступает сигнал, знак которого соответствует знаку угла крена в момент включения режима выведения самолета в горизонтальный полет. Если сумма данных сигналов превышает по абсолютной величине сигнал, соответствующий углу крена 180°, то на второй вход множительного устройства 10 через блок коммутации 18 с инвертора 13 поступает сигнал противоположного знака. Таким образом, в зависимости от величины вертикальной скорости выбирается оптимальный с точки зрения минимизации времени переходного процесса сигнал заданного значения угла крена. Сигнал заданного значения угла крена, соответствующей величины и знака, сформированный в множительном устройстве 10, поступает в автомат 7 поперечного управления. В автомате 7 поперечного управления на основе сигналов, соответствующих включению режима выведения самолета в горизонтальный полет, текущим значениям угла крена и угловой скорости и заданному значению угла крена, формируется управляющий сигнал, под воздействием которого исполнительный механизм 8 осуществляет управление самолетом в поперечной плоскости.
Кроме того, в системе использован автомат 20 тяги двигателей, который включается при поступлении на его вход сигнала с устройства 19 включения режима выведения самолета в горизонтальный полет. Автомат 20 тяги двигателей воздействует на рычаги управления тягой двигателей, изменяя, тем самым, режим работы последних и управляя приборной скоростью самолета.
Введение в управление автомата тяги позволяет существенно расширить полетную область, в которой выведение самолета в горизонтальный полет не приводит к уменьшению или увеличению приборной скорости с выходом за предельно допустимые значения, что обеспечивает повышение безопасности полета.
Как показали результаты моделирования комплексной системы управления КСУ-35 для самолета СУ-35, при использовании данной системы автоматического управления пространственным маневрированием самолета, время приведения самолета в горизонтальный полет при больших вертикальных скоростях уменьшается до 10-15 секунд и существенно уменьшается приборная скорость, при которой можно безопасно включать режим выведения самолета в горизонтальный полет. Следует отметить, что при использовании предлагаемой системы управления при начальной приборной скорости 450 км/ч и вертикальной скорости 360 км/ч приборная скорость уменьшилась на 100 км/ч, а при использовании известной системы, выбранной в качестве прототипа, - на 200 км/ч.
Таким образом, предлагаемая система реализуема и применима, в частности, для высокоманевренных самолетов типа СУ-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2325304C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРЕНОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2326788C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
Изобретение относится к области автоматического управления пространственным маневрированием самолета, в частности к системам управления самолетом, реализующим режим выведения самолета в горизонтальный полет. Данная система автоматического управления в режиме выведения самолета в горизонтальный полет предусматривает перекрестное управление продольным и поперечным каналами. Для этого в системе сигнал заданной нормальной перегрузки формируют как сигнал, пропорциональный произведению сигналов, соответствующих вертикальной скорости и абсолютной величине текущего угла крена, причем этот сигнал формируют таким образом, чтобы при углах крена по абсолютной величине, меньших 80°, он был отрицательным, при углах крена от 80° до 100° - равным нулю, а при углах крена по абсолютной величине, больших 100°, - положительным. Сигнал заданного значения угла крена формируют как сигнал, зависящий от вертикальной скорости, с учетом знака угла крена в момент включения режима выведения самолета в горизонтальный полет. Если в этот момент сумма сигналов, соответствующих значениям текущего угла крена и текущей угловой скорости крена, не превышает по абсолютной величине сигнал, соответствующий углу крена 180°, знак сигнала заданного значения угла крена соответствует знаку угла крена. Если сумма данных сигналов превышает по абсолютной величине сигнал, соответствующий углу крена 180°, знак сигнала, соответствующего заданному значению угла крена, меняется на противоположный. Кроме того, в данной системе автоматического управления предусмотрено принудительное включение автомата тяги, посредством которого управляют приборной скоростью. Изобретение позволяет повысить безопасность полета путем существенного уменьшения времени выведения самолета в горизонтальный полет и снижения вероятности выхода самолета за область предельно допустимых значений приборной скорости. 2 з.п. ф-лы, 1 ил.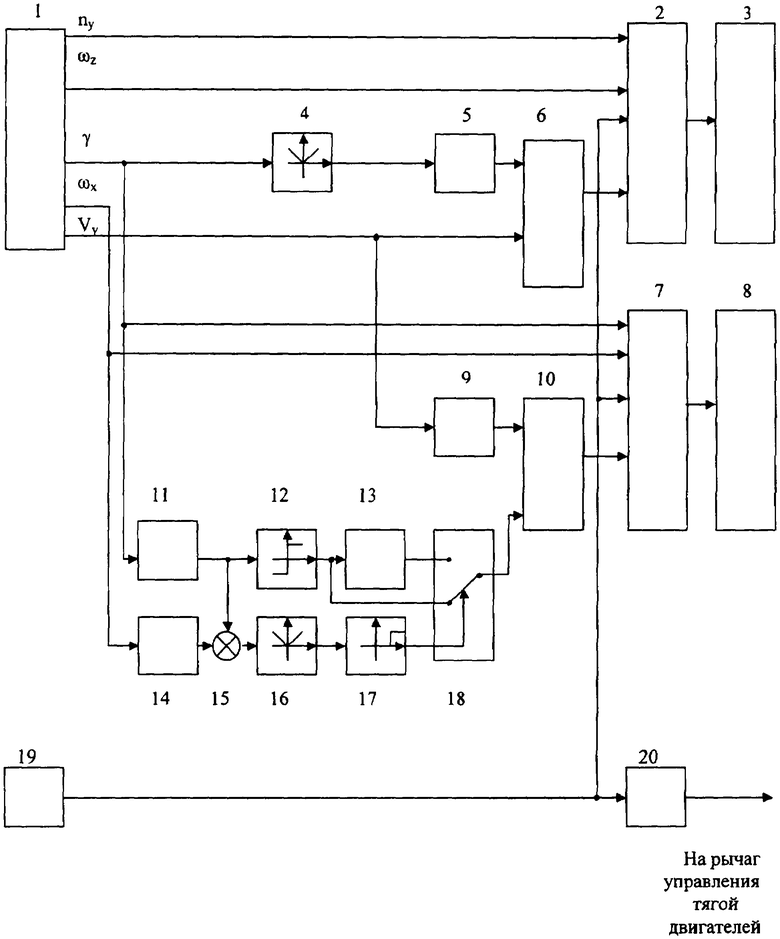
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1988 |
|
RU2025412C1 |
| RU 94008717 A1, 27.11.1995 | |||
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |

