1
Изобретение относится к автоматизации горного оборудования, а именно к устройству для управления рабочим оборудованием экскаваторов-драглайнов.
Известно устройство для управления движением ковша драглайна, включающее блоки регулирования скорости подъемной и тяговой лебедок, регулятор натяжения подъемных канатов, датчик и задатчик натяжения подъемных канатов.
Однако известное устройство не обеспечивает автоматизации управления движением ковша драглайна, что отрицательно влияет на его производительность и надежность, а также требует высокой квалификации и постоянного напряжения внимания машиниста.
Цель изобретения - повышение управляемости драглайна и увеличение его производительности и надежности.
Для этого в устройство дополнительно введены регулятор натяжения тяговых канатов, датчик и задатчик натяжения тяговых канатов, узел взаимной блокировки задатчиков натяження подъемных и тяговых канатов, причем вход блока регулирования скорости тяговой лебедки соединен с выходом регулятора натяжения тяговых канатов, один из входов которого подключен к выходу датчика натяжения тяговых канатов, а другой к выходу задатчика натяжения тяговых канатов, который через узел взаимной блокировки соединен с задатчиком натяжения подъемных канатов.
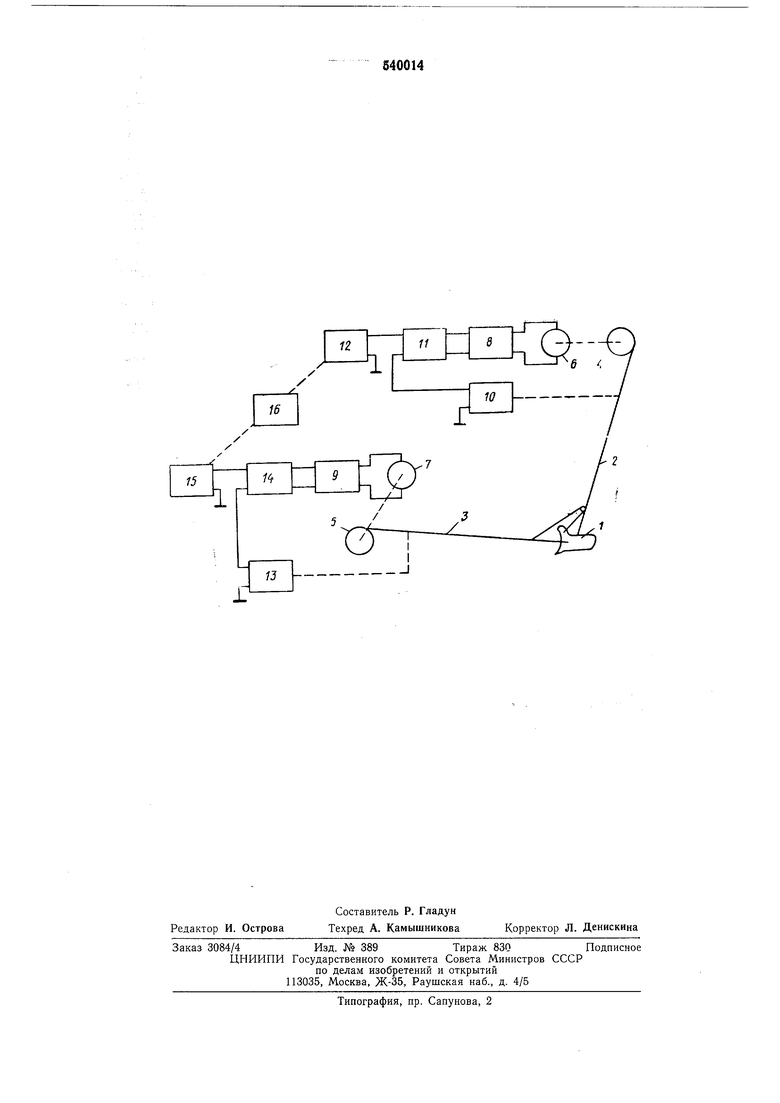
Схема устройства изображена на чертеже.
Устройство для управления движением ковша 1 драглайна с подъемными 2 и тяговыми 3 канатами, подъемной 4 и тяговой 5 лебедками, двигателем 6 подъемной лебедки и двигателем 7 тяговой лебедки, блоком регулирования скорости 8 двигателя подъемной лебедки и блоком регулирования скорости 9 двигателя тяговой лебедки, датчиком натяжения нодъемных канатов 10, регулятором натяжения подъемных канатов 11 и задатчиком натяжения подъемных канатов 12 содержит датчик натяжения тяговых канатов 13, электрически соединенный с одним из входов регулятора натяжения тяговых канатов 14, к другому входу которого подключен задатчик натяжения тяговых канатов 15, а выход регулятора натяжения тяговых канатов 14 подключен к блоку регулирования скорости 9 двигателя тяговой лебедки. Задатчики натяжения подъемных и тяговых канатов 12 и 15 связаны с узлом взаимной блокировки 16.
Принцип действия предлагаемого устройства основан на том, что управление движением ковша в плоскости стрелы осуш,ествляется регулированием натяжения подъемных и тяговых канатов.
Для этого устройство снабжено задатчиками натяжения подъемных и тяговых канатов 12 и 15. Поддержание заданных канатов осуществляется с помощью датчиков натяжений подъемных и тяговых канатов 10 и 13 и регуляторов натяжения подъемных и тяговых канатов И и 14. Выходные сигналы регуляторов натяжения 11 и 14, являющиеся задающими сигналами для блоков регулирования скорости 8 и 9, ограничены величинами, соответствующими номинальным скоростям двигателей подъемной и тяговой лебедок.
Для ограничения максимальных нагрузок на электромеханическое оборудование драглайна задатчики натяжения подъемных и тяговых канатов 12 и 15 снабжены ограничителями выходных сигналов. Для предотвращения попадания ковша 1 в область растяжки задатчики натяжения подъемных и тяговых канатов 12 и 15 снабжены узлом взаимной блокировки 16, исключающим возможность одновременного задания максимальных натяжений подъемных и тяговых канатов.
Устройство работает следующим образом.
Для отрыва груженого ковша 1 от забоя машинист драглайна устанавливает на задатчике натяжения 12 заданное натяжение подъемных канатов 2, соответствующее положению груженого ковша 1 в верхней точке выбранной траектории. Так как натяжение подъемных канатов 2 в момент отрыва меньше заданного, то регулятор натяжения подъемных канатов 11 обеспечивает подъем ковша 1 с номинальной скоростью и остановит ковш 1 в точке, в которой натяжение подъемных канатов 2 будет равно заданному. После отрыва груженого ковша 1 от грунта машинист устанавливает на задатчике натяжения 15 заданное натяжение тяговых канатов, соответствующее выбранной им траектории движения ковша 1. Регулятор натяжения тяговых канатов 14 обеспечивает переход ковша 1 на выбранную траекторию и в дальнейшем при движении ковша 1 по этой траектории автоматически изменяет скорость двигателя 7 тяговой лебедки 5, поддерживая заданное натяжение тяговых канатов 3.
Для разгрузки ковша 1 машинист задатчи5 ком натяжения 15 уменьшает заданное натяжение тяговых канатов 3, и ковш 1 выводится в зону разгрузки. Одновременно машинист уменьшает заданное натяжение подъемных канатов 2 с таким расчетом, чтобы оно было
0 меньше веса порожнего ковша 1, и начинает опускание ковша.
При опускании ковша 1 на забой машинист устанавливает определенное натяжение тяговых канатов, тем самым выбирая онределен5 ную траекторию опускания ковша для регулирования его удаления от драглайна. При копании машинист, регулируя натяжение подъемных канатов 2, изменяет толщину срезаемой стружки, а регулируя натяжение тяговых канатов 3, изменяет интенсивность наполнения ковша 1.
Формула изобретения
Устройство для управления движением ковша драглайна, включающее блоки регулирования скорости подъемной и тяговой лебедок, регулятор натяжения подъемных канатов, датчик и задатчик натяжения подъемных канатов, отличающееся тем, что, с целью повышения управляемости драглайна и увеличения его производительности и надежности, в него дополнительно введены регулятор натяжения тяговых канатов, датчик и задатчик натяжения тяговых канатов, узел взаимной блокировки задатчиков натяжения подъемных и тяговых канатов, причем вход блока регулирования скорости тяговой лебедки соединен с выходом регулятора натяжения тяговых канатов, один из входов которого подключен к выходу
0 датчика натяжения тяговых канатов, а другой к выходу задатчика натяжения тяговых канатов, который через узел взаимной блокировки соединен с задатчиком натяжения подъемных канатов.
6
I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2011 |
|
RU2457295C1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |