Изобретение относится к машиностроению, а именно к кривошипно-ползунным механизмам с двумя ползунами, предназначенным для преобразования вращательного движения в возвратно-поступательное, и может быть использовано, в частности, для перевода стрелок подвесных монорельсовых дорог, распределителей трубопроводного транспорта, а также в механизмах двухступенчатых прессов, компрессоров и в других устройствах, где необходим неодинаковый ход ползунов.
Известен .кривошипно-ползунный механизм, содержащий смонтированные на раме два ползуна, кривошипный вал с двумя кривошипами на концах и два шатуна, один из которых шарнирно связан одним концом с первым кривошипом, а другой шарнирно связан своим концомс вторым кривошипом, а другим - с одним из ползунов.
Недостатком известного механизма является то, что ход каждого ползуна не превышает двойной длины соответствующего кривошипа. Это сужает кинематические возможности известного механизма, особенно в случае его применения в стесненных условиях или в ручных инструментах, где существенное значение имеет уменьшение габаритов.
Цель изобретения - расширение кинематических возможностей механизма путем увеличения хода одного из ползунов по сравнению с двойной длиной кривошипа.
Поставленная цель достигается тем, что в кривошипно-ползунном механизме, содержащем раму, установленные на ней два ползуна, кривошипный вал с двумя кривошипами на концах и два шатуна, первый из которых шарнирно связан одним концом с первым кривошипом, а второй шатун шарнирно связан одним своим концом с вторым кривошипом, а другим - с одним из ползунов, кривошипный вал закреплен на втором ползуне, а первый шатун вторым своим концом шарнирно связан с рамой.
На фиг.1 изображен механизм, общий вид, план.
Механизм содержит смонтированные на раме 1 ползуны первый 2 и второй 3. На ползуне 3 закреплен редуктор 4, кинематически связанный с двигателем 5 и образующий с ним привод механизма, который может перемещаться вместе с ползуном 3 вдоль продольной оси рамы 1. Из редуктора 4 выступают концы кривошипного вала 6, на которых закреплены два кривошипа 7 и 8, т.е. вал 6 является общим валом кривошипов 7 и 8. Кривошип 7 кинематически связан
с шатуном 9, а кривошип 8 - с шатуном 10. Шатун 9 шарнирно прикреплен к раме 1, а шатун 10 также шарнирно связан с первым ползуном 2, при этом ползуны 2 и 3 могут
быть выполнены в виде тележек, установленных с возможностью перемещения вдоль продольной оси рамы 1.
Механизм работает следующим образом.
В исходном положении кривошип 8 повернут в сторону ползуна 2 и образует с шатуном 10 прямую линию, а кривошип 7 при этом образует прямую линию с шатуном 9. Ползуны 2 и 3 в этом случае располагаются в своих крайних левых положениях (пока- зано основными линиями). После включения привода по мере вращения кривошипов 7 и 8 ползуны 2 и 3 перемещаются вправо и при повороте этих кривошипов на
180 ползуны 2 и 3 занимают крайнее правое положение (показано штрихпунктирны- ми линиями). Если в этом положении привод механизма.продолжает работать, ползуны 2 и 3 возвращаются в исходное положение,
совершая возвратно-поступательное движение. При этом ход ползуна 3 соответствует двойной длине кривошипа 7, а ход ползуна 2 соответствует формуле
30
S(Li+L2)-2;
где S - ход ползуна 2;
Li -длина кривошипа 7; L-2 - длина кривошипа 8 .
Таким образом, в предлагаемом механизме обеспечивается одному из ползунов (ползуну 2)ход, существенно превышающий возможности, представляемые длиной его кривошипа 8, что расширяет кинематические возможности механизма, реализуемые в машинах возвратно-поступательного действия.
45
Формула изобретения
Кривошипно-ползунный механизм, содержащий раму, установленные на ней два ползуна, кривошипный вал с двумя кривошипами на концах и два шатуна, один из
которых шарнирно связан одним концом с первым кривошипом, а другой шатун шарнирно связан одним своим концом с вторым кривошипом, а другим - с одним из ползунов, отличающийся тем, что, с целью
расширения кинематических возможностей, кривошипный вал закреплен на другом ползуне, а первый шатун вторым своим концом шарнирно связан с рамой.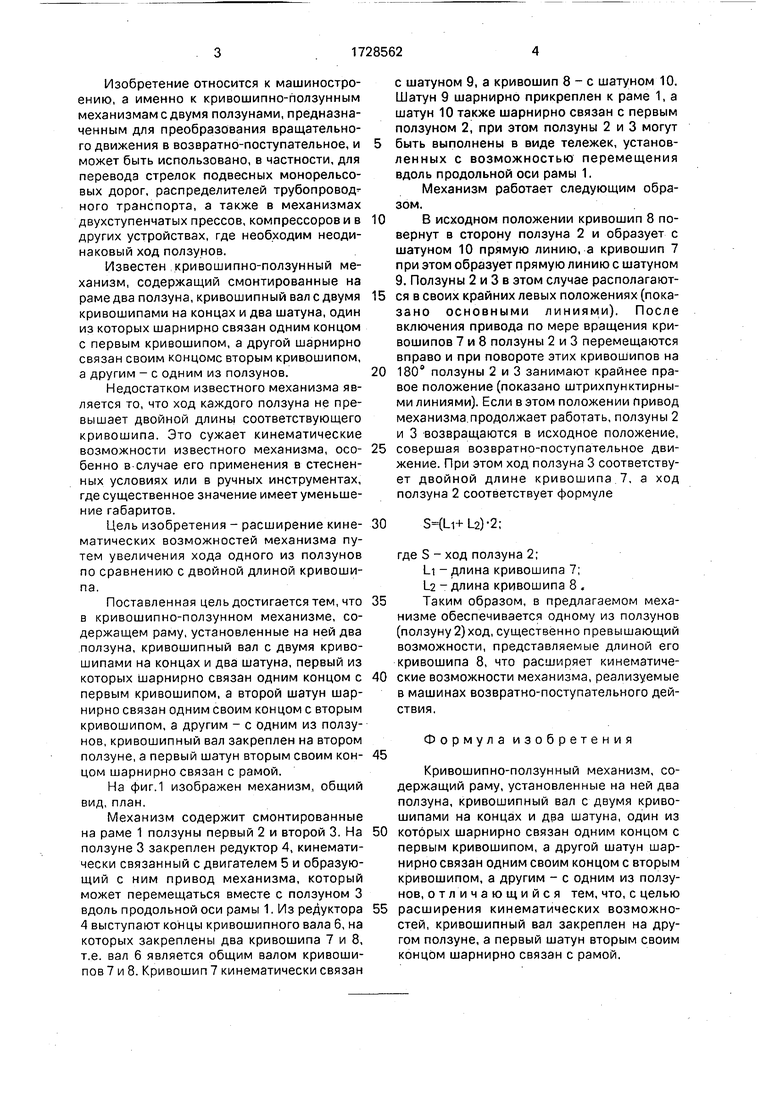
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипный механизм | 1990 |
|
SU1789800A1 |
| КРИВОШИПНО-ДВУХПОЛЗУННЫЙ МЕХАНИЗМ РИЯНОВА | 2016 |
|
RU2634851C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Многовыходной преобразователь движения | 1989 |
|
SU1807272A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| Кривошипно-ползунный механизм | 1987 |
|
SU1442762A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
Изобретение относится к машиностроению. Цель изобретения -расширение кинематических возможностей за счет увеличения хода ползуна. При вращении кривошипного вала 6 с закрепленными на его концах кривошипами 7 и 8 посредством шатунов 9 и 10 происходит перемещение ползунов 2 и 3 вдоль рамы 1 из одного крайнего положения в другое. При этом ход ползуна 3 равен двойной длине кривошипа 7, а ход ползуна 2 определяется по формуле S (Li + L2) 2, где Li -длина кривошипа 7; L.2 - длина кривошипа 2. 1 ил.
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Т.Н.- М.: Наука, 1971, с.499, мех.1544. |
