Заявляемое техническое решение относится к передвижным, регулируемым по длине конструкциям валов или содержащим передвижные части, особенно к телескопическим, составным и имеющим разъемные соединения, в том числе содержащим отдельные приводы для перемещения указанных передвижных частей.
Известно устройство составного вала (см. а.с. №429193, класс МПК F16C 3/02, заявлено 09.02.73 Уфимским нефтяным институтом, опубликовано 25.05.74), которое состоит из последовательно установленных на штанге цилиндрических обойм.
Сама штанга неподвижная. Обоймы взаимосвязаны между собой при помощи механизма, содержащего втулку - шестерню, охватывающую штангу.
Шестерня закреплена на конце одной из обойм. На конце другой обоймы имеется зубчатый венец, находящийся в зацеплении с шестерней через сателлиты, установленные на осях, жестко соединенных со штангой. При этом одна из обойм вала связана с приводом.
Известное устройство интересно в отношении заявляемого некоторой общностью кинематических связей его узлов и деталей, однако не позволяет осуществить функцию изменения длины.
Из описания изобретения по патенту Украины №58546 (МПК 7 В66С 23/867, заявлено 11.10.99, опубликовано 15.08.2003) известна телескопическая стрела, которая содержит основную часть в виде обоймы 1, в которую концентрично вводится промежуточная часть 2, охватывающая часть 3, которая несет груз.
При этом две первые через кронштейны связаны с гидроцилиндром как приводом, усилие от которого воспринимается частью, несущей груз через канат и шток. Известное техническое решение несомненно эффективно в работе и имеет широкий диапазон весовой составляющей поднимаемых и переносимых грузов.
Однако именно в связи с таким широким диапазоном оно усложнено, в чем нет потребности, если вес груза находится в обусловленном диапазоне.
Следовательно, для этого известного устройства характерны излишний вес и большие габариты.
Из описания к авторскому свидетельству СССР №918638 (МПК F16L 27/12, заявлено 04.07.80, опубликовано 07.04.80) также известно регулируемое телескопическое соединение трубчатых обойм.
Обоймы, наружная 5 и внутренняя 10, установлены телескопически с некоторым выступанием внутренней обоймы из наружной. При этом между ними размещены уплотнения. Вдоль и вне наружной обоймы 5 расположены винтовые пары в виде резьбовых стержней 1 с гайками 6.
Гайки 6 шарнирно взаимосвязаны с кронштейнами кольца 9. Кольцо 9 охватывает с зазором 5 выступающую часть внутренней обоймы 10 с возможностью проворота вокруг оси, пересекающей продольную ось охватываемой обоймы и перпендикулярной плоскости, которая проходит через оси резьбовых стержней.
Это известное техническое решение выбрано в качестве прототипа благодаря близости решаемой задачи, общности отдельных существенных признаков с заявляемым устройством и возможности их усовершенствования.
При этом перед авторами стояла задача создать такое техническое решение, которое позволило бы достичь совокупный технический результат, содержащий несколько логически взаимосвязанных причинно-следственной связью прогрессивных технических результатов, а именно:
1. повышение устойчивости при уменьшении прогиба от собственного веса вне зависимости от продольных размеров за счет использования относительно коротких винтовых валов с достаточно широким диапазоном изменения общей рабочей длины механизма при минимальных затратах времени;
2. компактность при уменьшении общей длины всего механизма в состоянии, когда он полностью сложен;
3. резонансная устойчивость при высоких оборотах;
4. простота и взаимозаменяемость узлов и деталей при обеспечении высокой технологичности их изготовления;
5. обеспечение высокого КПД в работе при обеспечении возможности реверса при вращении и продольном перемещении.
Поставленная задача решается тем, что в известном регулируемом телескопическом механизме, содержащем концентричные внутреннюю и наружную обоймы, взаимосвязанные между собой посредством винтов и гаек продольных винтовых пар с возможностью осевого перемещения от привода, произведены усовершенствования.
Усовершенствования заключаются в том, что концентричные обоймы взаимосвязаны размещенными между ними окружными опорами качения, при этом гайка этой винтовой пары выполнена за одно целое с упомянутой внутренней обоймой.
Этим достигается компактность механизма и его закрытость от внешних влияний, а следовательно, безопасность и надежность работы.
При этом винт упомянутой винтовой пары взаимосвязан с приводом через соединительную муфту и радиально-упорный подшипник в наружной обойме.
Упомянутый винт дополнительно установлен в радиально-упорный подшипник во внутренней обойме.
Гайка этой винтовой пары через внутреннюю концентричную обойму может быть взаимосвязана с одним из рядов упомянутых опор качения. Такая взаимная связь деталей и узлов обеспечивает за счет равномерного распределения нагрузок надежность работы и четкость выполняемых функций.
Упомянутая внутренняя обойма соединена промежуточной муфтой с дополнительной, последовательно расположенной на опорах качения, внутренней обоймой и дополнительной винтовой парой.
Гайка этой дополнительной винтовой пары встроена в указанную дополнительную внутреннюю обойму, а винт взаимосвязан с дополнительным радиально-упорным подшипником, установленным в последней.
Таким образом, в зависимости от удаленности объекта обслуживания, можно варьировать длину механизма.
Окружные опоры качения между концентричными обоймами могут быть размещены посредством радиально-упорных подшипников.
При этом подшипники винтов винтовых пар могут быть установлены во внутренних цилиндрических частях посредством упругих опор.
Все это позволяет надежно поддерживать необходимое взаимное расположение всех рабочих механизмов внутри наружной обоймы как в статике, так и в динамике.
Заявляемый регулируемый телескопический механизм иллюстрируется чертежами, где на:
- Фиг.1 показана выдвигаемая часть заявляемого регулируемого двухступенчатого телескопического механизма в его минимальном по длине положении для хранения или доставки к месту работы;
- Фиг.2 показана, как продолжение Фиг.1, выдвигающая часть заявляемого регулируемого двухступенчатого телескопического механизма в его минимальном по длине положении для хранения или доставки к месту работы;
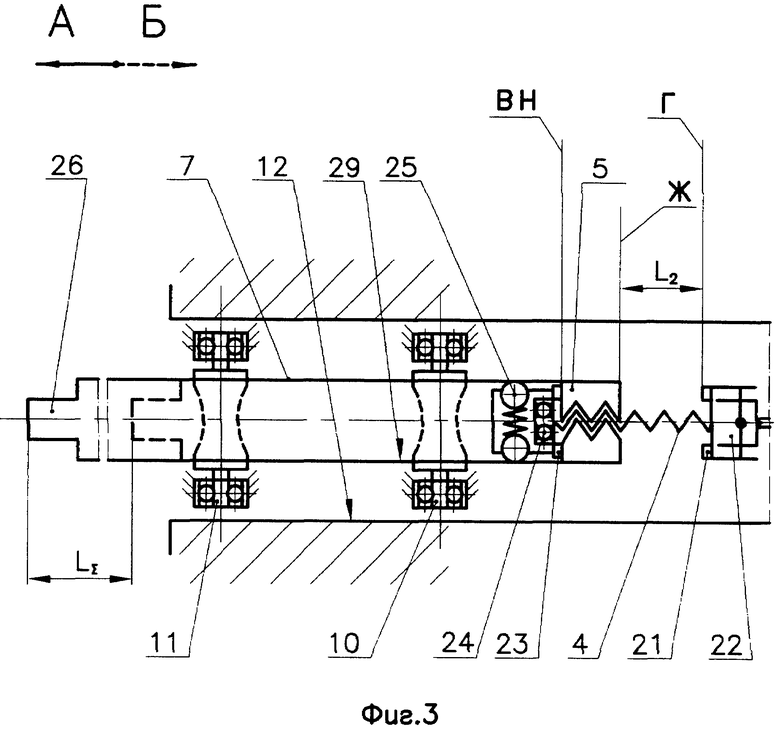
- Фиг.3 показана выдвигаемая часть заявляемого регулируемого двухступенчатого телескопического механизма в максимально раздвинутом рабочем положении;
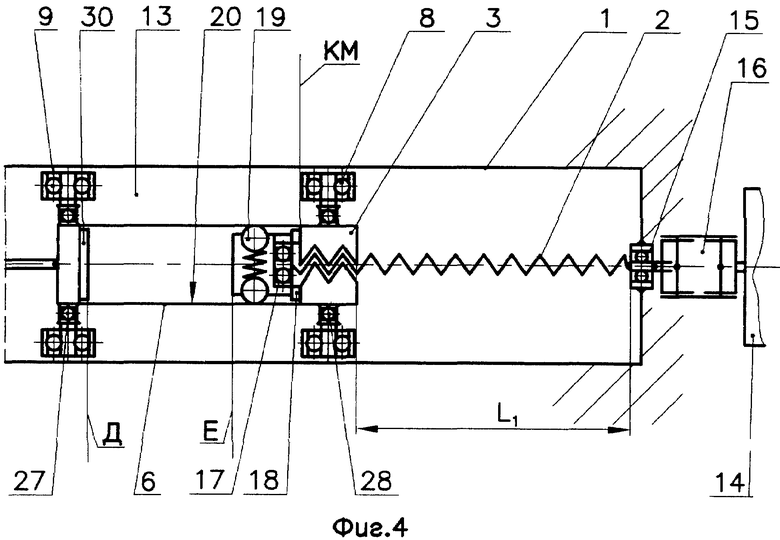
- Фиг.4 показана, как продолжение Фиг.3, выдвигающая часть заявляемого регулируемого двухступенчатого телескопического механизма в максимально раздвинутом рабочем положении.
Рассмотрим заявляемый регулируемый телескопический механизм в том оптимальном случае, когда его заданная длина требует по меньшей мере двух винтовых пар и двух внутренних обойм. Однако, как уже указывалось, таковых может быть больше в зависимости от удаленности обслуживаемого объекта.
В указанном конкретном выполнении заявляемый телескопический механизм содержит наружную продольную обойму 1 с установленными внутри нее и в ее продольной оси винтовыми парами, взаимосвязанными между собой.
Количество винтовых пар зависит исключительно от длины необходимого вылета для доставки объекта любого назначения, например, подвода устройства подачи соответствующей среды к месту обеспечения тушения пожара.
В предлагаемом примере конкретного выполнения можно условно выделить взаимосвязанные между собой ступени, в частности первую и вторую, в общей продольной наружной обойме 1.
Винтовые пары содержат: в первой выдвигающей ступени - винтовой вал 2 и ходовую гайку 3 и на переходе первой ко второй выдвигаемой ступени - винтовой вал 4 с ходовой гайкой 5 второй ступени.
При этом ходовая гайка 3 установлена в передней части внутреннего вала 6, выполненного в виде внутренней обоймы, а ходовая гайка 5 аналогично - в передней части внутреннего выдвигаемого вала 7 также в виде внутренней обоймы.
Внутренний выдвигающий вал 6 (он же выполняющий роль внутренней обоймы) установлен передней и конечной частями на паре разнесенных по его длине и подвижных относительно общей продольной оси устройства опор качения 8 и 9, а внутренний выдвигаемый вал 7(также выполняющий роль внутренней обоймы) аналогично установлен на паре разнесенных по его длине стационарных опор качения 10, 11.
В свою очередь через эти пары опор качения 8, 9 (подвижные) и 10, 11 (стационарные) и соответственно внутренние валы, выдвигающий 6 и выдвигаемый 7, подвижно взаимосвязаны с внутренней поверхностью 12 общей полости 13 наружной обоймы 1.
Винтовой вал 2 для получения вращательного движения взаимосвязан своим передним концом с приводом 14 через радиально-упорный подшипник 15 и двойную шарнирную муфту 16. Привод 14 обеспечивает двунаправленное вращение, в связи с чем заявляемый механизм является реверсивным.
Концевая часть винтового вала 2, проходящего через гайку 3 опоры вращения 8, взаимосвязана с другим радиально-упорным подшипником 17. Одной стороной подшипник 17 взаимосвязан с демпфером 18, а другой - супругой опорой 19, замыкаемой на внутренней поверхности 20 внутреннего, выдвигающего, вала 6 (он же выполняет функцию внутренней обоймы).
Далее этот внутренний вал 6, как выдвигающий, своей конечной частью у опоры качения 9 через шарнирную взаимосвязанную с демпфером 21 муфту 22 подсоединен к винтовому валу 4 на переходе от первой ко второй ступени. Последний, как указывалось выше, через гайку 5 взаимосвязан с внутренним выдвигаемым валом 7, внутри которого размещен демпфер 23 совместно с радиально-упорным подшипником 24 и упругой опорой 25.
На выходе из обоймы 1 внутренний выдвигаемый вал 7 имеет концевую часть 26 расчетного, функционально необходимого, сечения.
Для синхронно точной работы обеих ступеней заявляемого устройства опоры качения 8 и 9 первой ступени, взаимосвязанные с внутренней поверхностью 12 обоймы 1, установлены на валу 6 через радиально-упорные подшипники 27 и 28.
Следует отметить идентичность узлов и деталей первой и второй ступеней:
- в первой ступени последовательно соединенные винтовой вал 2 с радиально-упорным подшипником 17 и демпфером 18, удерживаемые упругой опорой 19 на внутренней поверхности 20 выдвигающего вала 6 (он же внутренняя обойма);
- во второй ступени последовательно соединенные винтовой вал 4 с радиально-упорным подшипником 24 и демпфером 23, удерживаемые упругой опорой 25 на внутренней поверхности 29 внутреннего выдвигаемого вала 7.
В первой ступени совместно с радиально-упорным подшипником 27 опоры качения 9 дополнительно размещен демпфер 30 навстречу упругой опоре 19.
При этом в первой ступени заявляемого решения гайка 3 имеет упорную торцевую поверхность М, совмещаемую с поверхностью К демпфера 18, а упругая опора 19 первой ступени своей торцевой поверхностью Е может быть совмещена с поверхностью Д на опоре качения 9.
Во второй ступени на гайке 5 предусмотрены аналогичная упорная торцевая поверхность Ж, которая при втягивании движется в сторону Б и совмещается с поверхностью Г демпфера 21 шарнирной муфты 22. При выдвижении механизма торцевая поверхность Н гайки 5 совмещается с поверхностью В демпфера 23 шарикоподшипника 24 упругой опоры 25 второй ступени.
Все указанные поверхности В, Г, Д, Е, Ж, К, М, Н перпендикулярны продольной оси устройства.
Механизм работает следующим образом.
Вращение от привода 14 через двойную шарнирную муфту 16 передается винтовому валу 2, а его ходовая гайка 3 перемещается вдоль оси в направлении А, увлекая за собой выдвигающий внутренний вал 6, который опирается на опоры качения 8 и 9, размещенные на концах вала 6 и катящиеся по внутренней поверхности 12 обоймы 1.
Осевое перемещение вала 6 на величину L1 приводит к такому же перемещению концевой части 26 выдвигаемого вала 7 и будет продолжаться до тех пор, пока поверхность М не упрется в поверхность К демпфера 18.
Далее винтовой вал 2, ходовая гайка 3, выдвигающий внутренний вал 6, шарнирная муфта 22, винтовой вал 4 вращаются, как цельный вал с оборотами привода14.
В результате начинается осевое перемещение в направлении А ходовой гайки 5 и связанного с ней внутреннего выдвигаемого вала 7, который опирается на опоры вращения 10, 11, и соответственно осевое движение концевой части 26 - перемещение на длину L2. Это осевое перемещение на длину L2 заканчивается при упоре поверхности Н в торец В гайки 5.
При этом система деталей 26-7-5 не вращается, а движется поступательно.
Таким образом, суммарное перемещение концевой части 26 определяется суммой перемещений L1 и L2, т.е.:
L∑=L1+L2,
где L1 = от 0 до L1 max;
L2 = от 0 до L2 max.
Величина максимальных перемещений L1max и L2max определяются конструктивными параметрами и настройками концевого выключателя известной конструкции.
Осевое перемещение в направлении А концевой части 26 выдвигаемого внутреннего вала 7 прекращается при достижении последним крайнего положения, т.е. L∑=max, или по команде специально программируемой системы управления.
Таким же образом в нужный момент времени могут определяться и промежуточные положения концевой части 26.
Обратное осевое перемещение концевой части 26 в направлении Б происходит с изменением на противоположное направления вращения привода 14. Тогда ходовая гайка 3 перемещается вместе с внутренним выдвигающим валом 6 в направлении Б до упора поверхности Д демпфера 30 в поверхность Е, связанную с валом 2.
При этом совокупность деталей 2-3-6-21-4 вращается с оборотами привода14, а ходовая гайка 5 вместе с внутренним валом 7 и концевой частью 26 перемещаются поступательно в направлении Б.
Заявляемое устройство позволяет обеспечить вращение единым валом совокупной системы деталей 2-3-6-21-4. Дальнейшее перемещение концевой части 26 будет осуществляться за счет перемещения гайки 5 по винтовому валу 4 до упора поверхности В демпфера 23 в поверхность Н гайки 5.
Последующее вращение привода 14 заставляет вращаться вал 4 и перемещать по себе гайку 5 и вал 7 до стыковки торца Ж с торцом Г демпфера 21.
После этого система деталей 5-4-21-6-3 прекращает вращение и дальнейшее перемещение концевой части 26 происходит за счет осевого перемещения гайки 3 по валу 2 до заданного положения, например, по команде от системы управления.
Упругие опоры 19, 25, предназначенные для поддержания концов винтовых валов 2, 4, обеспечивают центрирование валов 6, 7 при их перемещении и компенсацию неточностей их внутренних поверхностей 20, 29.
Демпферы 18, 21, 23 обеспечивают при торцевом ударе снижение динамических нагрузок в деталях и уменьшение износа контактирующих поверхностей.
Шарнирные муфты 22, 25 предназначены для компенсации неточностей изготовления деталей и их деформаций при работе.
Осевая сила (полезная нагрузка) передается через систему деталей 16, 15, 2, 3, 6, 22, 21, 4, 5, 7, 26 на перемещение полезного груза.
Опытный образец заявляемого регулируемого телескопического механизма успешно испытан в пожарных машинах для подачи среды огнетушения на различные расстояния и высоты. Были достигнуты все заявленные технические результаты, и главное, быстрота и оперативность обеспечения пожаротушения наряду с компактностью и удобством размещения в состоянии хранения и доставки к месту операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294297C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ В СКВАЖИНАХ МАЛОГО ДИАМЕТРА | 2015 |
|
RU2602241C1 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2373365C1 |
| УСТАНОВКА НАСОСНАЯ ПОРШНЕВАЯ | 2008 |
|
RU2387876C2 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| УСТРОЙСТВО ДЛЯ РЕЛАКСАЦИИ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ И СТАБИЛИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДЕТАЛЕЙ ЦИЛИНДРИЧЕСКИХ ФОРМ | 2023 |
|
RU2830378C1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |

Изобретение относится к передвижным, регулируемым по длине конструкциям валов или содержащим передвижные части, особенно к телескопическим, составным и имеющим разъемные соединения, в том числе содержащим отдельные приводы для перемещения указанных передвижных частей. Регулируемый телескопический механизм содержит внутреннюю и наружную концентричные обоймы и продольные винтовые пары, включающие гайку и винт. Обоймы дополнительно взаимосвязаны между собой окружными рядами опор качения, причем гайка винтовой пары выполнена за одно целое с внутренней обоймой. Винт упомянутой винтовой пары связан с приводом одним концом через соединительную муфту и радиально-упорный подшипник, установленный в наружной обойме, причем другим концом винт взаимосвязан с дополнительным радиально-упорным подшипником во внутренней обойме. Гайка упомянутой винтовой пары взаимосвязана с одним из рядов упомянутых опор качения. Внутренняя обойма соединена с промежуточной муфтой, которая далее соединена с дополнительными, последовательно размещенными внутренней обоймой со встроенной в последнюю гайкой винтовой пары на рядах опор качения и радиально-упорным подшипником, с которым взаимосвязан винт упомянутой дополнительной винтовой пары. Подшипники винтов винтовых пар установлены во внутренних обоймах посредством упругих опор. Технический результат: повышение устойчивости при уменьшении прогиба от собственного веса, обеспечение компактности, резонансной устойчивости, простоты и взаимозаменяемости узлов и деталей и также высокого КПД в работе. 4 з.п. ф-лы, 4 ил.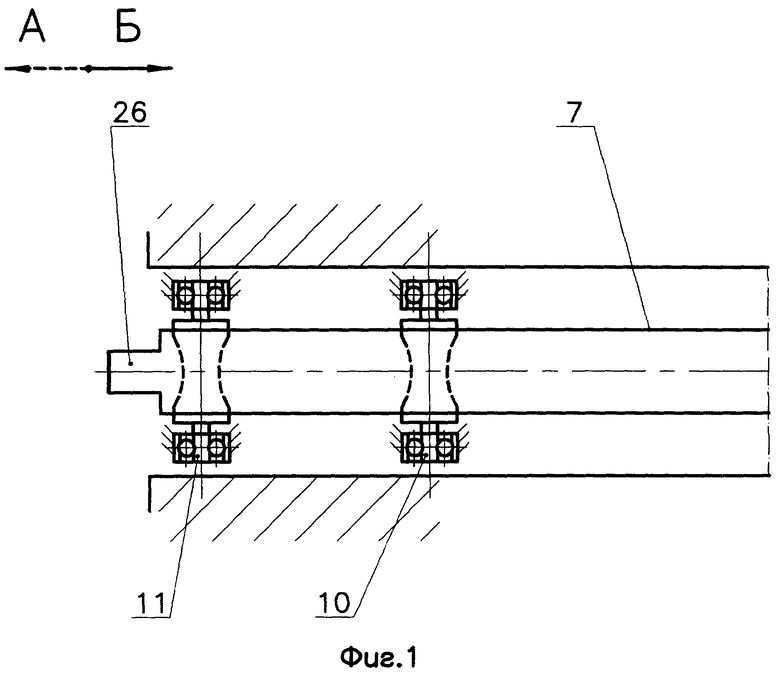
| Регулируемое телескопическое соединение труб | 1980 |
|
SU918638A1 |
| Телескопическая стрела | 1988 |
|
SU1557084A1 |
| RU 95108393 A1, 20.12.1996 | |||
| СПОСОБ КОМБИНИРОВАННОЙ СТАТИКО-ИМПУЛЬСНОЙ ОБРАБОТКИ ПОВЕРХНОСТНЫМ ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 2007 |
|
RU2347664C1 |

