Изобретение относится к машиностроению, а именно к импульсным приводам, применяемым для изменения скорости вращения выходного вала, и может быть использовано в различных машинах.
Известны импульсные приводы, содержащие генератор импульсов, передаточный механизм и механизм свободного хода. В части из них варьирование скорости вращения выходного вала достигается за счет изменения амплитуды импульсов в генераторе (например: Мальцев В.Ф. Механические импульсные передачи. Изд. 3-е. М.: Машиностроение. 1978. 376 с., - с.26) или в передаточном механизме (например: Мальцев В.Ф. Механические импульсные передачи. Изд. 3-е. М.: Машиностроение. 1978. 376 с., - с.27). Причем это варьирование производится путем изменения геометрических параметров звеньев в том числе автоматически (например Мальцев В.Ф. Механические импульсные передачи. Изд. 3-е. М.: Машиностроение. 1978. 376 с. - с.62). В других приводах варьирование происходит за счет использования сил инерции (Леонов А.И. Инерционные автоматические трансформаторы вращающего момента. - М.: Машиностроение, 1978. - 224 с., ил. - с.9-19).
Общим недостатком упомянутых приводов является конструктивная сложность механической части системы управления, которая делает нерациональным использование этих приводов в большинстве реальных машин.
Известна храповая передача вращательного момента, снабженная устройством уменьшения скорости (GB 580046 A, F16Н 29/02, опубликована 26.08.1946). Она содержит ведущий кулачок, коромысловый толкатель, собачку, закрепленную на толкателе и взаимодействующую с ведомым храповым колесом, а также устройство управления, обеспечивающее удержание коромыслового толкателя в верхнем положении вне контакта с кулачком. Конструкция содержит пружины: прижимающую собачку к храповому колесу, толкатель к кулачку и пружину, удерживающую толкатель в верхнем положении.
Большое количество пружин и кинематических пар делает конструкцию сложной и снижает ее КПД и надежность работы.
Наиболее близкой по совокупности конструктивных признаков к предлагаемому изобретению является простейшая храповая передача (Артоболевский И.И. Механизмы в современной технике: Справочное пособие для инженеров, конструкторов и изобретателей. В 7-ми Т.-Т. 3. 2-е изд., перераб. - М.: Наука, 1979 г. - с.102), которая содержит стойку, ведущий вал с установленным эксцентриком - генератор импульсов, ведомое храповое колесо и собачку, имеющую зуб для взаимодействия с храповым колесом и отверстие для взаимодействия с эксцентриком.
Недостаток этого импульсного привода - отсутствие регулирования передаточного отношения.
Для устранения этого недостатка в импульсном приводе, содержащем стойку, двигатель, ведущий вал с эксцентриком, ведомое храповое колесо и собачку, на которой выполнены зуб для взаимодействия с храповым колесом и отверстие для взаимодействия с эксцентриком, привод снабжен системой управления положением собачки, включающей два электромагнита, один из которых установлен на стойке вблизи зуба собачки и предназначен для ее удержания вне контакта с храповым колесом, а другой электромагнит расположен напротив средней части собачки и предназначен для ее прижатия к храповому колесу.
Указанное расположение электромагнитов обеспечивает их работу не на притягивание, а только на удержание собачки, что минимизирует энергопотери и габариты электромагнитов.
При отключенной собачке ведущий вал накапливает кинетическую энергию, а при включенной отдает ее храповому колесу, вращая последнее. Частота и продолжительность включения задается системой управления собачки в зависимости от скорости вращения ведущего вала. При этом максимальная средняя скорость ведомого вала соответствует передаточному числу храповой передачи, а минимальная средняя скорость практически не ограничена. Максимальный вращающий момент T2 на храповом колесе ограничен условием Аi<К·Е1,
где Ai - полезная работа при повороте храпового колеса на один угловой шаг,
E1 - кинетическая энергия ведущего звена,
 ;
;  ,
,
z2 - число зубьев храпового колеса,
J1 - приведенный момент инерции ведущего вала, ω1 - его угловая скорость,
К - коэффициент полноты использования кинетической энергии маховика, тогда  , приняв К=0.5, получаем T2=0.04·J1·ω1 2·z2
, приняв К=0.5, получаем T2=0.04·J1·ω1 2·z2
На фиг.1 изображен предлагаемый привод.
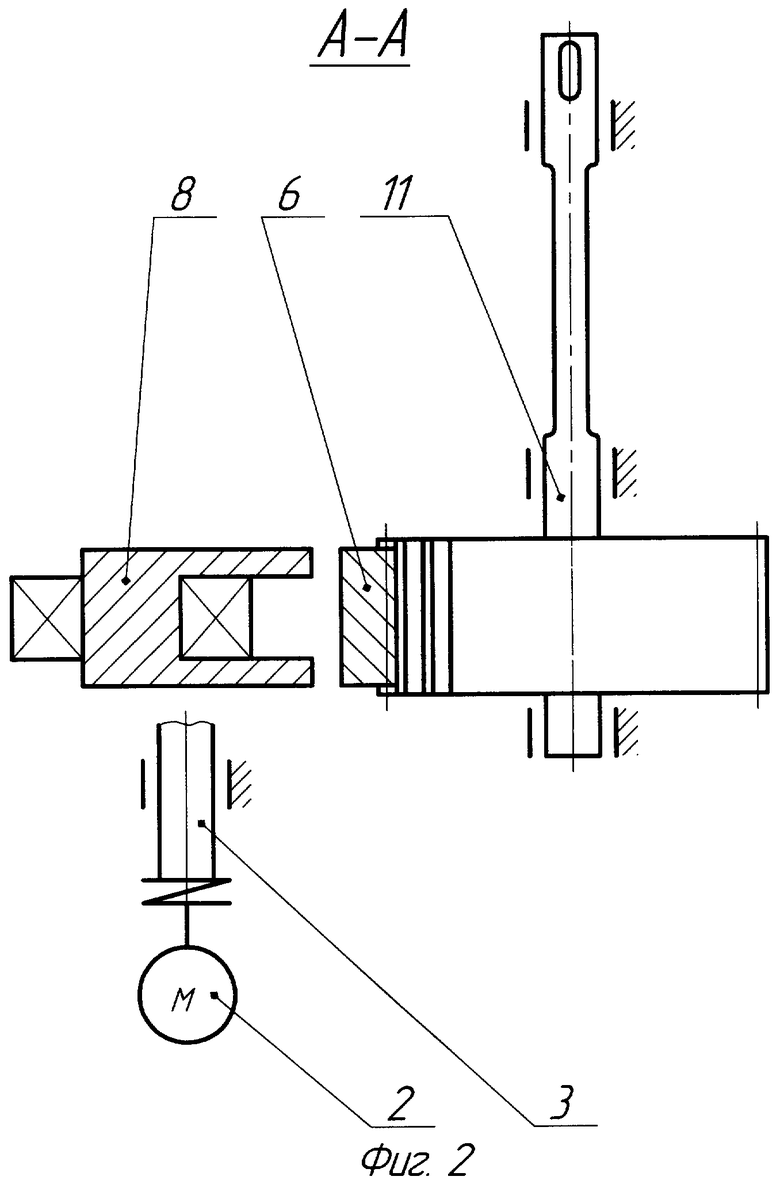
На фиг.2 - его разрез по А-А.
На фиг.3 - схема движений собачки.
Импульсный привод (фиг.1, 2), содержит стойку 1, двигатель 2, ведущий вал 3 с эксцентриком 4, ведомое храповое колесо 5, собачку 6, на которой выполнены зуб для взаимодействия с храповым колесом 5 и отверстие для взаимодействия с эксцентриком 4. Система управления положением собачки содержит два электромагнита 7 и 8. Дополнительно привод снабжен обратной собачкой 9 с пружиной 10 и торсионным валом 11.
На фиг.3 представлены траектории движения зуба собачки при различных режимах. Кривая I соответствует движению зуба собачки, опирающейся на упор электромагнита 7. Кривая II характеризует траекторию зуба собачки, постоянно взаимодействующего с храповым колесом. Кривая III соответствует множеству положений зуба собачки, опирающейся на упор электромагнита 8.
Привод работает следующим образом.
В силовом цикле движения звеньев включается электромагнит 7, приближающий собачку к храповому колесу. При этом, в фазе рабочего хода, собачка не опирается на упор электромагнита, а взаимодействует с зубом храпового колеса, поворачивая последнее. На фиг.3 этой фазе движения соответствует участок траектории АБ.
В фазе обратного хода собачка опирается на упор электромагнита 7, а ее зуб отходит от храпового колеса и движется по траектории БВА. При движении по данной траектории в конце обратного хода зуб собачки мягко ложится в соответствующую впадину венца храпового колеса. Это позволяет избежать удара собачки о следующий зуб, что уменьшает шум при работе передачи.
В цикле накопления энергии включается электромагнит 8, при этом собачка касается его упора в фазе своего обратного хода, и остается притянутой к этому упору в течение следующего цикла, не опираясь на храповое колесо. На фиг.3 это траектория III. Таким образом, включением соответствующих электромагнитов 7 и 8 обеспечивается работа механизма в силовом или накопительном режиме.
В случае работы механизма в автоматическом режиме система управлением положением собачки обеспечивает включение электромагнита 7 при достижении ω1>[ω]. При этом привод функционирует в силовом цикле. При скорости ω1<[ω] система управления отключает электромагнит 7 и включает электромагнит 8, то есть переводит привод в режим накопления энергии. В течение одного или нескольких последующих циклов ведущий вал накапливает кинетическую энергию, разгоняясь до скорости ω1>[ω] и снова включается электромагнит 7.
Обратная собачка предотвращает возвращение храпового колеса назад под действием момента сопротивления T2 на выходном валу, что обеспечивает гарантированное зацепление собачки с храповым колесом в следующем цикле взаимодействия.
Минимальное число зубьев храпового колеса ограничено допустимым изменением угла давления в храповом зацеплении z2≈30. С учетом этого ограничения предлагается использовать данный привод для автоматического регулирования передаточного отношения в зависимости от приложенного крутящего момента T2 в диапазоне передаточных отношений от 30 до 300.
Применение привода возможно в машинах, где не требуется повышенная плавность движения, например, в задвижках запорной арматуры, винтовых подъемниках и так далее.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2321787C1 |
| Импульсный вариатор | 1980 |
|
SU937852A1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2310786C1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Дискретная реверсивная передача | 1981 |
|
SU1044872A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Устройство для привода транспортеров питателей-дозаторов | 1989 |
|
SU1655405A1 |
| Устройство для измерения смещений грунта | 1983 |
|
SU1105643A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |

Изобретение относится к машиностроению, а именно к импульсным приводам, применяемым для изменения скорости вращения выходного вала, и может быть использовано в различных машинах. Привод содержит стойку, двигатель, ведущий вал с эксцентриком, ведомое храповое колесо и собачку, на которой выполнены зуб для взаимодействия с храповым колесом и отверстие для взаимодействия с эксцентриком. При этом привод снабжен системой управления положением собачки. Система управления состоит из электромагнита, установленного на стойке вблизи зуба собачки и предназначенного для ее удержания вне контакта с храповым колесом, и другого электромагнита, расположенного напротив средней части собачки и предназначенного для ее прижатия к храповому колесу. Достигается автоматическое регулирование передаточного отношения. 3 ил.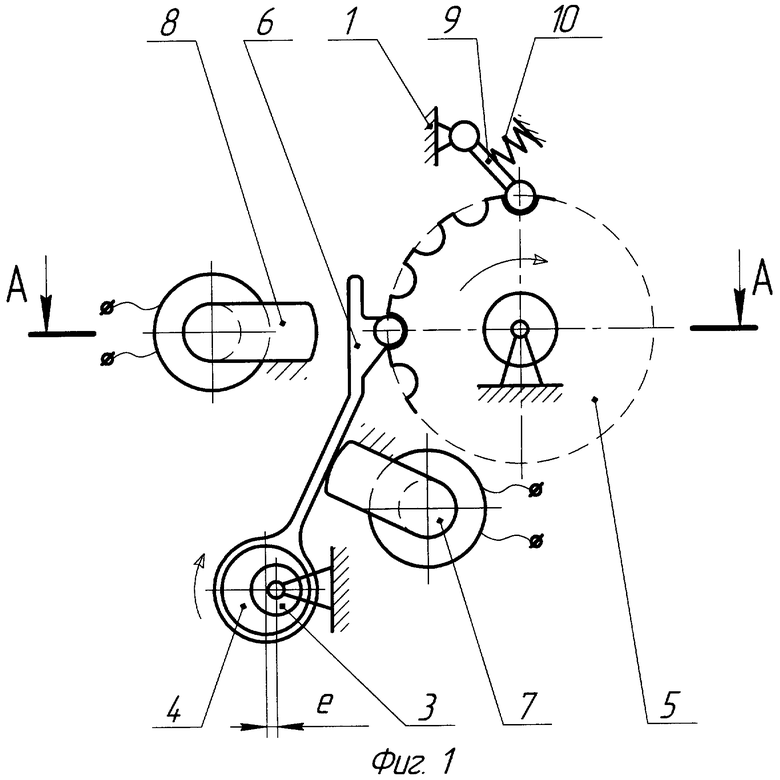
Импульсный привод, содержащий стойку, двигатель, ведущий вал с эксцентриком, ведомое храповое колесо и собачку, на которой выполнены зуб для взаимодействия с храповым колесом и отверстие для взаимодействия с эксцентриком, отличающийся тем, что привод снабжен системой управления положением собачки, включающей электромагнит, установленный на стойке вблизи зуба собачки, предназначенный для ее удержания вне контакта с храповым колесом, и другой электромагнит, расположенный напротив средней части собачки, предназначенный для ее прижатия к храповому колесу.
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| Справочное пособие для инженеров, конструкторов и изобретателей | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| - М.: Наука, 1979, с.102, схема 1708 | |||
| Государственные стандарты | |||
| Электродвигатели | |||
| Издание официальное | |||
| Издательство государственного комитета стандартов, мер и измерительных приборов СССР | |||
| - М., | |||

