Изобретение относится к области судовождения - управлению движением судна по заданному направлению с использованием приемника спутниковой навигационной системы и систем автоматического управления вектором скорости движения судна.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления движением судна» (RU 2240953 C1, 27.11.2004). Способ управления направлением движения судна основан на использовании информации от приемника спутниковой навигационной системы, блока заданного значения путевого угла, и сумматора, в котором по сигналам: текущего путевого угла, заданного путевого угла, угловой скорости судна формируется результирующий сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением судна (RU 2292289 C1, 27.01.2007, принятый в качестве прототипа), в котором автоматическое управление направлением движения судна осуществляется с использованием: сумматора, рулевого привода, блока выработки угловой скорости, датчика руля, приемника спутниковой навигационной системы, задатчика точек поворота судна и блока заданного маршрута. Отличительной особенностью рассматриваемого способа управления движением судна является корректировка заданного значения путевого угла в процессе плавания из точки А. в точку Б, затем В … по заданному маршруту. Использование этого способа гарантирует выход судна в очередную заданную точку изменения направления движения даже при сильном волнении на море. (Конкретное описание, рассматриваемого способа управления приводится ниже в материалах заявки, т.к. на базе использования этого способа построен предлагаемый ниже способ).
Известные способы автоматического управления направлением движения судна по заданной траектории являются в действительности полуавтоматическими, т.к. требуют непрерывного участия судоводителя для введения корректировок по скорости движения судна (для поддержания заданного временного графика движения, нарушение заданного временного графика движения вызывается изменением абсолютной скорости движения судна относительно заданной скорости при изменении внешних условий эксплуатации).
Основными недостатками рассмотренных способов автоматического управления движением являются:
- отсутствие контроля за выполнением заданного временного графика движения и появления нарушений заданного временного графика движения корабля,
- отсутствие автоматической корректировки вектора скорости хода корабля для поддержания заданного временного графика движения по заданной траектории.
Техническим результатом предлагаемого способа управления движением корабля является:
- управление движением судна по вектору путевого угла, т.е. движение по заданной траектории в соответствии с заданным (программным) временным графиком движения судна,
- обеспечение автоматической корректировки заданного значения скорости хода судна через повторяющийся фиксированный интервал времени «Δt» для сохранения заданного временного графика движения судна.
Технический результат достигается тем, что способ автоматического управления движением судна осуществляется с использованием блока заданного маршрута, приемника спутниковой навигационной системы, датчика руля, рулевого привода и сумматора, на вход которого подают сигналы:
- угловой скорости судна и текущего путевого угла - с приемника спутниковой навигационной системы,
- угла перекладки руля - с датчика руля,
- заданного путевого угла, который формируют в блоке заданного маршрута с использованием сигналов заданных значений широты и долготы точек «Б», «В» … будущего изменения направления движения судна, а также сигналов текущей широты и долготы судна - из приемника спутниковой навигационной системы, сигнал с выхода сумматора подают на вход рулевого привода, через интервал времени «Δt» в момент времени «T0+Δt» в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна в точке «А1» и сигналом широты точки «Б» первого поворота судна (будущего момента времени - «ТБ») и модуль второй разности между сигналом текущей долготы судна в точке «А1» и сигналом долготы точки «ТБ», если модуль первой разности больше величины «С» или модуль второй разности больше величины «С», то формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в точке «А1» и заданным значениям широты и долготы точки «ТБ», который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, формирование заданного путевого угла через следующие интервалы времени «Δt» производят аналогично до момента времени «T0+mΔt», когда модуль первой разности между сигналом текущей широты судна в момент «T0+mΔt» и сигналом широты точки «Б» и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Б» будут меньше «С», тогда формируют сигнал заданного значения путевого угла, по текущим значениям широты и долготы судна в момент времени «T0+mΔt» и заданным значениям широты и долготы точки «В» второго поворота судна (будущего момента времени «ТВ») и вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, в следующие интервалы времени «Δt» от «Т0+(m+1)Δt» до «Т0+(m+n)Δt», когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С» формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки «В» второго поворота судна, который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, аналогично формируют заданное значение путевого угла для третьей, четвертой … последней точек поворота судна. Дополнительно используют привод гребного вала, регулятор оборотов гребного вала и вычислитель, на вход которого вводят сигналы:
- широт и долгот точек «Б», «В» … изменения направления движения судна - из блока заданного маршрута,
- заданного времени движения судна на отрезках между точками поворота - из блока заданного маршрута,
- текущей широты и долготы судна - из приемника спутниковой навигационной системы,
в вычислителе формируют сигнал заданной скорости хода, который вводят в регулятор оборотов гребного вала, где с использованием сигнала текущей скорости хода судна - из приемника спутниковой навигационной системы, формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, через интервал времени Δt, в момент времени Т0+Δt в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна и сигналом широты точки «Б» первого поворота судна и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки первого поворота судна, если модуль первой разности больше величины «С» или модуль второй разности больше величины «С», то в вычислителе формируют сигнал заданной скорости судна с использованием сигналов:
- широт и долгот точек изменения направления движения судна в соответствии с заданным маршрутом (из блока заданного маршрута),
- текущей широты и долготы судна (из приемника СНС),
- заданного времени движения судна (из блока задания маршрута),
сигнал заданной скорости судна (с выхода вычислителя) вводят в регулятор оборотов гребного вала, на второй вход которого вводят сигнал текущей скорости хода судна (из приемника СНС), на выходе регулятора оборотов гребного вала формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, через следующие интервалы времени «Δt» производят аналогично формирование сигнала заданной скорости судна, до момента времени «T0+mΔt», когда модуль первой разности между сигналом текущей широты судна в момент «T0+mΔt» и сигналом широты точки «Б» первого поворота судна и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Б» первого поворота судна будут меньше «С», тогда в вычислителе формируют сигнал заданной скорости судна с использованием сигналов:
- широты и долготы судна в момент времени «T0+mΔt» - из приемника спутниковой навигационной системы,
- широты и долготы точки «В» второго поворота судна - из блока заданного маршрута,
- заданного времени движения судна от первой точки поворота «Б» до второй точки поворота «В» - из блока заданного маршрута, сигнал заданной скорости судна (с выхода вычислителя) вводят в регулятор оборотов гребного вала, на второй вход которого вводят сигнал текущей скорости хода судна (из приемника спутниковой навигационной системы, на выходе регулятора оборотов гребного вала формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, в следующие интервалы времени «Δt» от «Т0+(m+1)Δt» до «Т0+(m+n)Δt», когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С» в вычислителе формируют сигнал заданной скорости судна и последующие сигналы управления скоростью хода судна аналогично описанному выше с момента времени Т0+Δt.
Рассмотрим формирование управления судном по путевому углу.
На вход сумматора подают сигналы:
- угловой скорости судна «ω» и текущего путевого угла «ПУ» - из приемника СНС,
- угла перекладки руля «δ» - с датчика руля.
В момент времени «Т0» в блоке заданного маршрута формируют сигнал заданного путевого угла «ПУзд.» с использованием сигналов:
- заданных значений широты φБ, и долготы «λБ» точки «Б» (будущей ближайшей точки поворота при движении судна по заданному маршруту);
- текущей широты «φ» и долготы «λ» судна в точке «А» - из приемника СНС.
Сигнал с выхода сумматора подают на вход рулевого привода для обеспечения движения судна с путевым углом, равным заданному значению «ПУзд.А,Б»:

Через интервал времени «Δt» в момент времени «T0+Δt» в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна (в момент времени «T0+Δt», когда судно находится в точке «А1») и сигналом широты точки «Б» первого поворота судна в будущий момент времени «ТБ» и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки «Б» первого поворота судна (в будущий момент времени «ТБ»).
Используя оба модуля в блоке заданного маршрута, формируют неравенства:

где - (φ-φi), (λ-λi) - разность текущей широты (долготы) судна в точке «Аi» и широты (долготы) ближайшей точки «i=Б» изменения направления движения судна при движении от точки «А1» к точке «Б», сигналы φ=φА1 и λ=λА1 вводят в блок заданного маршрута из приемника СНС,
- С=Const.
Если зависимость (2) удовлетворяется, то формируют сигнал заданного значения путевого угла ПУзд.«А1»,«Б» по текущим значениям широты и долготы судна в точке «А1», соответствующей моменту времени «T0+Δt», и заданным значениям широты и долготы точки «Б» первого поворота судна (в будущий момент времени «Тi=Б»). Сигнал ПУзд.«А1»,«Б» вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода (в соответствии с зависимостью (1а):

Формирование заданного путевого угла через следующие интервалы времени «Δt» производят аналогично до момента времени «T0+mΔt».
В момент времени «T0+mΔt» в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна и сигналом широты точки первого поворота судна «Б» (соответствующий моменту времени «ТБ») и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Б». Если оба модуля будут меньше сигнала «С=Const»:

то формируют сигнал заданного значения путевого угла ПУзд.Аm,Б, по текущим значениям широты и долготы судна в момент времени «T0+mΔt» (близкому к «ТБ») и заданным значениям широты «φВ» и долготы «λВ» точки «В» - следующего (второго) поворота судна, соответствующего будущему моменту времени «Тi=B», который вводят на вход сумматора. Сигнал с выхода сумматора подают на вход рулевого привода. В последующие интервалы времени «Δt» от «Т0+(m+1)Δt» до «Т0+(m+n)Δt»
(когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С», (т.е. удовлетворяется зависимость (2)) формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки «В» (второго поворота судна в будущий момент времени «ТB»), который вводят на вход сумматора. Сигнал с выхода сумматора подают на вход рулевого привода … (аналогично заданное значение путевого угла формируют для третьей, четвертой … последней точек поворота судна). Таким образом осуществляется управление движением судна по заданному путевому углу (рассмотренные выше операции в предлагаемом способе управления полностью совпадают с операциями по способу управления по патенту RU 2292289 C1).
Рассмотрим как в предложенном способе осуществляется управление длиной вектора путевого угла (скоростью хода судна).
Одновременно с момента времени «Т0» формируют сигнал заданной скорости хода судна (движение судна от точки «А» к точке «Б»), для поддержания скорости хода, обеспечивающей движение судна в соответствии с заданным временным графиком. С этой целью дополнительно используют в штатной системе автоматического управления скоростью хода судна:
- привод гребного вала,
- регулятор оборотов гребного вала,
- вычислитель.
На вход вычислителя вводят:
- сигналы широт и долгот точки «Б» (ближайшего изменения направления движения судна в соответствии с заданным маршрутом) - из блока заданного маршрута,
- сигнал заданного времени движения судна «tзд.А,Б» на отрезках траектории от точки «А» к точке «Б» - из блока заданного маршрута,
- сигналы текущей широты и долготы судна (точки «А») - из приемника СНС.
В вычислителе формируют сигнал заданной скорости хода судна:

где LА,Б - длина отрезка между точками «А» (φА, λА) и «Б» (φБ, λБ) - сигналы координат точек «А» и «Б» формируют из блока заданного маршрута,
tзд.А,Б - заданное время движения судна из точки «А» (с момента времени T0) в точку «Б» (соответствующей будущему моменту времени Тi=Б), сигнал tзд.А,Б формируют из блока заданного маршрута;

Сформированный в вычислителе сигнал «Vзд.АБ», в соответствии с зависимостью (4), вводят в регулятор оборотов гребного вала, где с использованием сигнала текущей скорости хода судна «V» - из приемника СНС, формируют сигнал заданных оборотов гребного вала:
nзд.АБ=f(V-Vзд.АБ, n),
где - n - текущие обороты гребного винта.
Сигнал «nзд.АБ» вводят в привод гребного вала, для обеспечения равенства текущей скорости судна «V» заданной «Vзд.АБ»:

Через интервал времени «Δt» в момент времени «T0+Δt» в блоке заданного маршрута используют сигналы модуля первой разности между сигналом текущей широты судна (в точке «А1») и сигналом широты точки «Б» (первого поворота судна в будущий момент времени «ТБ») и модуля второй разности между сигналом текущей долготы судна (в точке «А1») и сигналом долготы точки «Б».
Если модуль первой разности больше величины «С» или модуль второй разности больше величины «С» (что соответствует зависимости (2) в момент времени «T0+Δt» судно находится в точке «А1») в вычислителе формируют сигнал заданной скорости хода Vзд.А1.Б по:
- текущим значениям широты и долготы судна (в точке «А1», полученным из приемника СНС) и заданным значениям широты и долготы точки «Б» (первого поворота судна в будущий момент времени «ТБ», полученным из блока заданного маршрута для формирования LА1,Б - длины отрезка между точками «А1» (φА1, λА1) и «Б» (φБ, λБ), (сигналы координат точки «Б» - используют из блока заданного маршрута, сигналы координат точки «А1» - используют из приемника СНС),
- заданному (корректированному) значению времени движения судна из текущей точки «А1» (в момент времени «T0+Δt») до точки «Б:

Сигнал заданной скорости хода Vзд.А1.Б формируют вида:

где LА1,Б - длина отрезка между точкой «А1» (φА1, λА1) (сигналы координат точек «А1» - используют из приемника СНС) и точкой «Б» (φБ, λБ) (сигналы координат точки «Б» используют из блока заданного маршрута),
- tзд.А1,Б=ТБ-(Т0+Δt) - заданное время движения судна из точки «А1» (с момента времени (Т0+Δt) в точку «Б» (соответствующую будущему момент времени Ti=Б,
сигнал tзд.А1,Б формируют в вычислителе с использованием сигналов «ТБ» из блока заданного маршрута в соответствии с зависимостью (6).
Сигнал «Vзд.А1.Б», сформированный в вычислителе по зависимости (4а) вводят в регулятор оборотов гребного вала, где с использованием сигнала текущей скорости хода судна «VA1» - из приемника СНС, формируют сигнал заданных оборотов гребного вала nзд.А1.Б=f(V-Vзд.А1.n), который вводят в привод гребного вала (что обеспечит движение судна с заданной (корректированной) скоростью Vзд.А1Б):

Формирование заданной скорости хода «Vзд.Аi,Б» повторяют через интервалы времени «Δt» аналогично описанному выше многократно до момента времени «T0+mΔt».
В момент времени «T0+mΔt» модуль первой разности между сигналом текущей широты судна (в точке «Аi=m», момент времени «T0+mΔt») и сигналом широты точки «Б» и второй модуль разности между сигналом текущей долготы судна (в точке «Аi=m») и сигналом долготы точки «Б» будут меньше «C=Const», (т.е. будет удовлетворяться зависимость (3)), формируют сигнал заданного значения скорости хода Vзд.Аm, которое в дальнейшем принимаем «Vзд.Б,В», по текущим значениям широты и долготы судна в момент времени «T0+mΔt (близкий к «ТБ») и заданным значениям широты и долготы точки «В» (второго поворота судна в будущем моменте времени «ТВ») и заданного времени движения судна из точки «Б» (с момента времени ТБ) в точку «В»: tзд.Б,В=(ТВ-ТБ) - из блока заданного маршрута. Сигнал «Vзд.Б,В», формируют в вычислителе аналогично зависимости (4):

где LБ,В - длина отрезка между точкой «Б» (φБ, λБ) и точкой «В» (φВ, λВ) сигналы (φБ, λБ), (φВ, λВ) формируют из блока заданного маршрута.
Сигнал «Vзд.Б,В» вводят на вход системы автоматического управления скоростью хода судна для обеспечения движения судна со скоростью хода, равной «Vзд.Б,В» (в регулятор оборотов гребного вала, где с использованием сигнала текущей скорости хода судна «VБ» - из приемника СНС, формируют сигнал заданных оборотов гребного вала nзд.Б,В=f(VБ-Vзд.Б,В. n), который вводят в привод гребного вала, что обеспечит движение судна с заданной (корректированной) скоростью Vзд.Б,В):

В следующие интервалы времени «Δt» от «Т0+(m+1)Δt» до «Т0+(m+n)Δt», когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С» (т.е. удовлетворяется зависимость (2)) процесс формирования сигнала заданного значения скорости хода судна «Vзд.БiВ» повторяют аналогично описанному выше для интервала времени «Vзд.А1.Б»).
Применение предлагаемого способа позволяет полностью автоматизировать процесс правления движением корабля из точки «А» в точку «Б», затем «В» … по вектору заданного путевого угла (движение по заданной траектории с заданным временным графиком - с корректированием как заданного путевого угла, так и скорости хода судна).
Устройство автоматического управления движением судна по заданному вектору путевого угла.
Рассмотрим работу конкретного устройства автоматического управления движением судна по заданной траектории в соответствии с заданным временным графиком движения из точки «А» (с момента времени «Т0») в точки «Б», затем «В» …, реализованного в соответствии с предлагаемым способом автоматического управления движением судна.
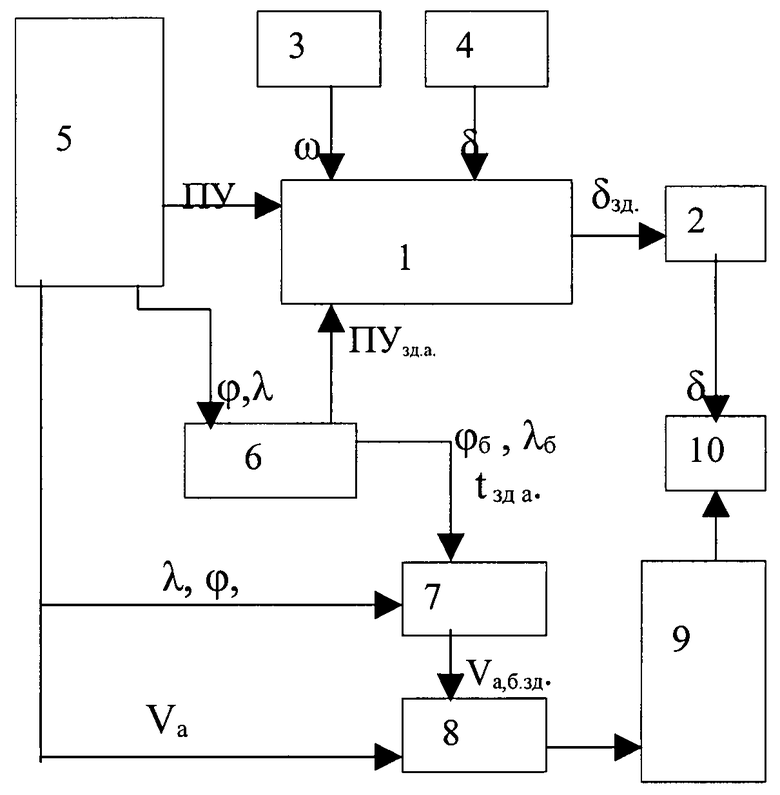
Устройство содержит: сумматор - 1, рулевой привод - 2, блок выработки угловой скорости - 3, датчик руля - 4, приемник спутниковой навигационной системы (СНС) - 5, блок заданного маршрута - 6, вычислитель - 7, регулятор оборотов гребного вала - 8, привод гребного вала - 9, судно - объект управления - 10.
Все связи между блоками устройства приведены на чертеже. Реализация предлагаемого устройства может быть осуществлена с использованием микросхем типа 140 УД 6 (сумматор - 1, вычислитель - 7, блок заданного маршрута - 6). Блок выработки угловой скорости - 3. Типовой датчик угловой скорости (ДУС-5 с чувствительностью не ниже 0,05 гр./с, как вариант сигнал угловой скорости может быть получен из приемника CHC). Приемник СНС-5 - типовой с двумя антеннами. Рулевой привод - 2 - штатный, регулятор оборотов гребного вала - 8, и привод гребного вала - 9, - блоки штатной автоматической системы управления скоростью хода судна.
Работа устройства в процессе автоматического управления движением судна по заданному путевому углу.
На вход сумматора 1 поступают сигналы:
- угловой скорости судна «ω» с блока выработки угловой скорости 3,
- угла перекладки руля «δ» - с датчика руля 4, текущего путевого угла «ПУ» с приемника спутниковой навигационной системы (СНС) 5,
- заданного путевого угла «ПУзд.», с блока заданного маршрута 6.
На выходе сумматора 1 формируется заданное значение угловой скорости перекладки руля «d/dt δзд.», в соответствии с зависимостью (1) руль будет автоматически перекладываться и обеспечивать удержание судна на заданной траектории движения с путевым углом, равным заданному:
ПУ=ПУзд.
В блоке заданного маршрута 6 осуществляется циклически, через интервал времени «Δt», вычисление заданного значения путевого угла «ПУзд». Уточненное значение «ПУзд» поступает на вход сумматора 1 и далее в рулевой привод 2, на перекладку руля, обеспечивая выход судна на заданное уточненное направление движения. Сигналы циклов перестройки значений «ПУзд» осуществляются с начала рейса из точка «А» (с момента времени «Т0») и кончая временем прихода корабля в заданную - заключительную точку маршрута.
Из приемника СНС 5 текущая широта и долгота местонахождения судна (φ, λ) поступает в блок 6, в который заранее введены все широты и долготы i - точек поворота судна (в рассматриваемом случае первая точка изменения направления движения - «Б» φi=Б, λi=Б). По сигналам текущего местонахождения судна (φ, λ) и точке ближайшего поворота «Б» (φi=Б, λi=Б) формируются зависимости вида (2) или (3). Если выполняется зависимость (2) в блоке 6, формируется заданное значение путевого угла по точкам нахождения судна (φ, λ) и точке «Б» (φi=Б, λi=Б), если выполняется зависимость (3) - заданное значение путевого угла формируется по точкам (φm близкое к φБ, λm близкое к λБ) и точке следующего (второго) поворота «В» (φi=В, λi=B), аналогично формируется «ПУзд.», при движении судна на следующих отрезках В-Г, Г-Д ….
Работа устройства при управлении скоростью движения судна в соответствии с заданным временным графиком.
В момент времени «Т0» в блоке заданного маршрута 6 формируется сигнал заданного времени движения судна на отрезке траектории от точки «А» до точки первого поворота траектории «Б» - tзд.А,Б,,=ТБ-Т0, которое вводится в вычислитель 7 (где ТБ - расчетное время прибытия судна в точку «Б»).
При нахождении судна в точке «А» (момент времени Т0) в вычислитель 7 поступают:
- из блока заданного маршрута 6.:
а) сигналы широты и долготы точки «Б» (φi=Б, λi=Б) - первого поворота траектории,
б) сигналы заданного времени движения судна из точки «А» в точку «Б»:
tзд.А,Б=(ТБ-Т0) (с момента времени Т0 из точки «А» в точку «Б», в которой должно быть судно в момент времени Тi=Б),
- из приемника СНС 5 сигналы текущих значений широты и долготы судна (в точке «А» (φА, λА)).
В вычислителе 7 формируется:
- длина отрезка «LАБ» между точками «А» (φА, λА) и «Б» (φБ, λБ),
- заданная скорость хода судна при движении от точки «А» к точке «Б» в соответствии с зависимостью (4):
VА.Б.зд.=LАБ./tзд.АБ,
Сигнал заданной скорости хода «VАБ» с выхода вычислителя 7 поступает на вход регулятора оборотов гребного вала 8, на второй вход которого поступает сигнал текущей скорости судна «VA» (в точке «А») - из приемника СНС 5. Сигнал задания оборотов гребного вала с выхода регулятора оборотов гребного вала 8 «nзд.», (поступает в привод гребного вала 9, при этом текущая скорость корабля «VA» становится равной заданному значению «VАБ.зд» в соответствии с зависимостью (6).
Через интервал времени Δt (в момент времени ТА1=Т0+Δt) в блоке заданного маршрута 6 формируют сигналы в соответствии с зависимостью (2) или (3). Если удовлетворяется зависимость (2), то в вычислителе 7 формируется:
- длина отрезка (LА1,Б) от точки «А1» (φА1, λА1) (текущего положения корабля в момент времени (T0+Δt) до первой точки поворота «Б» и заданной скорости хода судна Vзд.A1 в соответствии с зависимостью (4А).
С этой целью в вычислитель 7 вводятся сигналы для формирования Vзд.А1:
- заданного времени движения корабля (tзд.А1,Б=ТБ-(T0+Δt) из точки «А1» в точку «Б» (из блока задания маршрута 6),
- широты и долготы первой точки изменения направления движения корабля «Б» (φБ, λБ), (из блока задания маршрута 6),
- текущей широты и долготы судна (φА1, λA1) из приемника СНС 5).
Сигнал заданной скорости корабля (Vзд.A1) из вычислителя 7 поступает на вход регулятора оборотов гребного вала 8, на второй вход которого поступает сигнал текущей скорости корабля «VA1» в момент времени «T0+Δt» из приемника СНС 5. На выходе регулятора оборотов гребного вала 8 формируется сигнал управления оборотами гребного вала «nзд.A1». Этот сигнал вводится на вход привода гребного вала 9, при этом текущая скорость судна «VА1» станет соответствовать заданному значению «Vзд.А1».
Через следующие интервалы времени Δt, если будет удовлетворяться зависимость (2)) вычисления «Vзд.Аi» в вычислителе 7 будут проводится аналогично описанному выше вычислению «Vзд.А1». При неудовлетворении зависимости (2) и удовлетворении зависимости (3) (обозначим этот момент времени Tm=(T0+mΔt) в вычислителе 7 формирование заданной скорости движения судна станет иной, а именно сигнал «Vзд.Аi=m» в вычислителе 7 формируется:
- по текущим значениям широты и долготы судна в момент времени «T0+mΔt», («Т0+mΔt» близок к «ТБ») - сигналы поступают из приемника СНС 5,
- заданным значениям широты и долготы точки «В» (второго поворота судна в будущем моменте времени «ТВ») - сигналы поступают из блока заданного маршрута 6,
- заданного времени движения судна из точки «Б» (момент времени ТБ) в точку «В»: tзд.Б,В=(ТВ-ТБ), которое поступает из блока заданного маршрута 6.
Сигнал «Vзд.Ai=m» обозначим «Vзд.Б,В», который формируется в вычислителе 7 аналогично зависимости (4):

Из вычислителя 7 «Vзд.Б,В» вводится на вход блока 8 системы автоматического управления скоростью хода судна, как описано выше для точки «А», что позволит обеспечить движение судна со скоростью хода, равной «Vзд.Б,В».
В следующий момент времени Тm+1=T0+(m+1)Δt (если будет удовлетворяется зависимость (2), а не (3) в блоке 6), то вычисления «Vзд.Бi,В» проводятся аналогично описанному выше вычислению «Vзд.А1Б». В вычислителе 7 аналогичное формирование заданной скорости хода судна «Vзд.Бi,В» будет происходить до момента времени Тm+n=T0+(m+n)Δt, когда зависимость (3) в блоке 6 будет удовлетворяться вместо зависимости (2). Вычисление «Vзд.Бi=n,В», в вычислителе 7 будет проходить аналогично вычислению «Vзд.Аi=m».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
Изобретение относится к области судовождения, в частности к автоматическому управлению движением судна. Способ использует сигналы текущего путевого угла от приемника спутниковой навигационной системы и заданного значения путевого угла от блока заданного маршрута, которые совместно с сигналами угловой скорости судна и угла перекладки руля используют для формирования суммарного управляющего сигнала рулевым приводом судна. В процессе выполнения рейса через фиксированные интервалы времени формируют первый модуль разности текущей широты судна и широты «i» точки поворота судна по заданной траектории движения и второй модуль разности текущей долготы судна и долготы «i» точки поворота судна по заданной траектории движения. При удовлетворении условия, когда любой из двух модулей больше величины «С» заданное значение путевого угла формируют по текущей точке движения судна и точке ближайшего поворота движения судна. При выполнении условия, если оба модуля меньше заданной величины, заданное значение путевого угла определяют из текущего нахождения судна в следующую точку поворота движения судна. Для автоматического поддержания временного графика движения судна в соответствии с заданным используют дополнительно регулятор оборотов гребного вала, привод гребного вала и вычислитель в котором формируют заданную скорость хода судна (также с коррекцией через интервал времени Δt). Сигнал заданной скорости судна сравнивают с сигналом текущей скорости из приемника спутниковой навигационной системы. Разницу сигналов вводят в регулятор оборотов гребного вала, который через привод гребного вала, корректируя обороты гребного вала, поддерживает скорость хода судна равной заданному корректированному значению. Техническим результатом предложенного способа являются: управление движением судна по вектору путевого угла, т.е. движение по заданной траектории в соответствии с заданным (программным) временным графиком движения судна, и обеспечение автоматической корректировки заданного значения скорости хода судна через повторяющийся фиксированный интервал времени «Δt» для сохранения заданного временного графика движения судна. 1 ил.
Способ автоматического управления движением судна с использованием блока заданного маршрута, приемника спутниковой навигационной системы, датчика руля, рулевого привода и сумматора, на вход которого подают сигналы:
- угловой скорости судна и текущего путевого угла - с приемника спутниковой навигационной системы,
- угла перекладки руля - с датчика руля,
- заданного путевого угла, который формируют в блоке заданного маршрута с использованием сигналов заданных значений широты и долготы точек «Б», «В» … будущего изменения направления движения судна, а также сигналов текущей широты и долготы судна из приемника спутниковой навигационной системы,
сигнал с выхода сумматора подают на вход рулевого привода, через интервал времени «Δt» в момент времени «T0+Δt» в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна в точке «A1» и сигналом широты точки «Б» первого поворота судна (будущего момента времени - «TБ») и модуль второй разности между сигналом текущей долготы судна в точке «A1» и сигналом долготы точки «ТБ», если модуль первой разности больше величины «С» или модуль второй разности больше величины «С», то формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна в точке «A1» и заданным значениям широты и долготы точки «ТБ», который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, формирование заданного путевого угла через следующие интервалы времени «Δt» производят аналогично до момента времени «T0+mΔt», когда модуль первой разности между сигналом текущей широты судна в момент «T0+mΔt» и сигналом широты точки «Б» и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Б» будут меньше «С», тогда формируют сигнал заданного значения путевого угла, по текущим значениям широты и долготы судна в момент времени «T0+mΔt» и заданным значениям широты и долготы точки «В» второго поворота судна (будущего момента времени «ТВ») и вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, в следующие интервалы времени «Δt» от «T0+(m+1)Δt» до «T0+(m+n)Δt», когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С», формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки «В» второго поворота судна, который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, аналогично формируют заданное значение путевого угла для третьей, четвертой … последней точек поворота судна, отличающийся тем, что дополнительно используют привод гребного вала, регулятор оборотов гребного вала и вычислитель, на вход которого вводят сигналы:
- широт и долгот точек «Б», «В» … изменения направления движения судна - из блока заданного маршрута,
- заданного времени движения судна на отрезках между точками поворота - из блока заданного маршрута,
- текущей широты и долготы судна - из приемника спутниковой навигационной системы,
в вычислителе формируют сигнал заданной скорости хода, который вводят в регулятор оборотов гребного вала, где с использованием сигнала текущей скорости хода судна из приемника спутниковой навигационной системы, формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, через интервал времени Δt, в момент времени T0+Δt, в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна и сигналом широты точки «Б» первого поворота судна и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки первого поворота судна, если модуль первой разности больше величины «С» или модуль второй разности больше величины «С», то в вычислителе формируют сигнал заданной скорости судна с использованием сигналов:
- широт и долгот точек изменения направления движения судна в соответствии с заданным маршрутом - из блока заданного маршрута,
- текущей широты и долготы судна - из приемника спутниковой навигационной системы,
- заданного времени движения судна - из блока задания маршрута,
сигнал заданной скорости судна с выхода вычислителя вводят в регулятор оборотов гребного вала, на второй вход которого вводят сигнал текущей скорости хода судна из приемника спутниковой навигационной системы, на выходе регулятора оборотов гребного вала формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, через следующие интервалы времени «Δt» производят аналогично формирование сигнала заданной скорости судна, до момента времени «T0+mΔt», когда модуль первой разности между сигналом текущей широты судна в момент «T0+mΔt» и сигналом широты точки «Б» первого поворота судна и второй модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Б» первого поворота судна будут меньше «С», тогда в вычислителе формируют сигнал заданной скорости судна с использованием сигналов:
- широты и долготы судна в момент времени «T0+mΔt» - из приемника спутниковой навигационной системы,
- широты и долготы точки «В» второго поворота судна - из блока заданного маршрута,
- заданного времени движения судна от первой точки поворота «Б» до второй точки поворота «В» - из блока заданного маршрута,
сигнал заданной скорости судна с выхода вычислителя вводят в регулятор оборотов гребного вала, на второй вход которого вводят сигнал текущей скорости хода судна из приемника спутниковой навигационной системы, на выходе регулятора оборотов гребного вала формируют сигнал заданных оборотов гребного вала, который вводят в привод гребного вала, в следующие интервалы времени «Δt» от «T0+(m+1)Δt» до «T0+(m+n)Δt», когда модуль первой разности больше величины «С» или модуль второй разности больше величины «С» в вычислителе формируют сигнал заданной скорости судна и последующие сигналы управления скоростью хода судна аналогично описанному выше с момента времени T0+Δt.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |

