Изобретение относится к области измерений и используется для определения статического момента тел, преимущественно длинномерных, со сложным нерегулярным профилем поперечного сечения, в том числе анизотропных, и может быть использовано для определения статического момента лопаток турбомашин.
Известен способ определения статического момента лопаток турбин (см. Технология производства паровых и газовых турбин / Н.Я. Бауман, М.И. Яковлев, И.Н. Свечков. М.: Машиностроение, 1973. - 464 с.), в котором фиксируют взвешиваемую лопатку на одном (первом) плече двухплечевого коромысла и устанавливают противовесы на другом (втором) плече. Первое плечо длиной, равной рабочему радиусу установки лопатки, опирается на измерительную платформу весов. Перемещают противовесы вдоль второго плеча, при этом доводят стрелки весов ориентировочно до половины шкалы весов и закрепляют противовесы. Поочередно фиксируют на первом плече коромысла все лопатки пакета и измеряют разность статических моментов лопаток по отношению друг к другу.
Однако такой способ имеет ограниченные функциональные возможности, так как не позволяет определить абсолютное значение статического момента тела (лопатки) относительно любой базовой оси.
Наиболее близким по технической сущности к предлагаемому изобретению является способ, реализованный в устройстве для измерения статического момента лопаток (тел) (см. патент РФ №2204117, МПК7 G01M 1/12, опубл. 2003 г.), в котором измеряют реакцию в одной из двух опор измерительной системы (балки) без закрепленного тела, уравновешивают балку с помощью гирь противовеса и это положение принимают за ноль отсчета, закрепляют тело на балке на рабочем радиусе установки консольно относительно опор, измеряют реакцию в той же опоре и вычисляют абсолютное значение статического момента тела (лопатки).
Недостатками такого изобретения являются ограниченные функциональные возможности, так как консольное закрепление тел на разных рабочих радиусах установки увеличивает диапазон нагрузок, действующих на измерительную опору, которые не могут быть измерены с помощью одного типоразмера устройства, и большие габариты, вызванные необходимостью размещения тела на рабочем радиусе установки.
Технической задачей изобретения является расширение функциональных возможностей способа за счет определения статического момента тела относительно любой базовой оси, определения абсолютного значения веса и координаты центра тяжести при одной установке тела на одно измерительное устройство.
Решение поставленных задач достигается тем, что в известном способе определения статического момента тел, включающем измерение реакции в измерительной опоре системы, установление нуля отсчета, закрепление тела на балке и вычисление абсолютного значения статического момента тела, установление нуля отсчета проводят сразу после измерения реакции в измерительной опоре, закрепление тела на балке осуществляют между измерительной и фиксирующей опорами, измеряют реакцию в измерительной опоре при расположении тела в первом положении, соответствующем одному расстоянию центра тяжести тела от фиксирующей опоры, перемещают тело из первого положения во второе, затем измеряют реакцию в измерительной опоре во втором положении, соответствующем другому расстоянию центра тяжести тела от фиксирующей опоры, вычисляют вес Рл тела, координату а центра тяжести и статический момент Мс относительно базовой поверхности тела, статический момент Мcr тела относительно любой базовой оси по соотношениям:
Mc=bR1-cPл;
Мcr=Pл(а+rл),
где: R1 - величина реакции измерительной опоры в первом положении, соответствующем одному расстоянию центра тяжести тела от фиксирующей опоры, Н;
R2 - величина реакции измерительной опоры во втором положении, соответствующем другому расстоянию центра тяжести тела от фиксирующей опоры, Н;
b - расстояние между опорами, мм;
с - расстояние базовой поверхности тела от фиксирующей опоры при первом положении тела, мм;
Δ - расстояние между расположениями базовой поверхности тела, образующееся при расположении тела в первом положении и во втором, мм;
rл - расстояние от базовой поверхности тела до любой базовой оси, мм.
Сущность технического решения поясняется чертежом, на котором приведена расчетная схема устройства.
Устройство содержит основание 1, фиксирующую опору 2, балку 3, тело 4 с центром тяжести 5 и базовой поверхностью 6, измерительную опору 7 в виде датчика силы.
Длинномерное тело 4 со сложным нерегулярным профилем поперечного сечения закрепляют на балке 3 между фиксирующей опорой 2 и измерительной опорой 7 таким образом, чтобы базовая поверхность 6 тела 4 была перпендикулярна оси балки 3, а центр тяжести 5 тела 4 имел возможность двухпозиционного фиксированного расположения относительно фиксирующей опоры 2. При этом первое положение характеризуется одним расстоянием центра тяжести 5 тела 4 от фиксирующей опоры 2, а второе - другим.
Способ определения статического момента тела заключается в следующем.
Первоначально измеряется реакция в измерительной опоре 7 без закрепленного на балке 3 тела 4, и это положение принимается за ноль системы отсчета. Затем закрепляют на балке 3 тело 4 в первом положении между измерительной 7 и фиксирующей 2 опорами. Измеряют реакцию в измерительной опоре 7 при расположении тела 4 в первом положении. Затем перемещают тело 4 из первого положения во второе. Измеряют реакцию в измерительной опоре 7 при расположении тела 4 во втором положении. Вычисляют вес тела Рл по соотношению:
где: R1 - величина реакции измерительной опоры в первом положении, соответствующем одному расстоянию центра тяжести тела от фиксирующей опоры, Н;
R2 - величина реакции измерительной опоры во втором положении, соответствующем другому расстоянию центра тяжести тела от фиксирующей опоры, Н;
b - расстояние между опорами, мм;
Δ - расстояние между расположениями базовой поверхности тела, образующееся при расположении тела в первом положении и во втором, мм. Затем вычисляется координата центра тяжести а относительно базовой поверхности тела по формуле
где с - расстояние базовой поверхности тела от фиксирующей опоры при первом положении тела, мм.
Статический момент Мс относительно базовой поверхности тела вычисляется по формуле:
Mс=bR1-cPл.
Статический момент Мcr тела относительно любой базовой оси определяется по формуле:
Мcr=Рл(а+rл),
где rл - расстояние от базовой поверхности тела до любой базовой оси, мм.
Использование изобретения расширяет диапазон измерения статических моментов тел разных весов и линейных размеров с помощью одного типоразмера устройства благодаря тому, что нагрузка, действующая на измерительную опору, всегда меньше веса тела, так как оно располагается между опорами. Применительно к определению статического момента лопаток турбомашин использование изобретения дает возможность определять статические моменты всех лопаток любой существующей турбины с помощью одного типоразмера устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса и координат центра тяжести тел | 2019 |
|
RU2710833C1 |
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| ПЛАТФОРМА ДЛЯ ИССЛЕДОВАНИЯ ОПОРНЫХ РЕАКЦИЙ | 2004 |
|
RU2270603C1 |
| Устройство для определения статического момента изделий | 1979 |
|
SU894377A1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СПОСОБ ПСИХОФИЗИОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2126649C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ПРОДОЛЬНОЙ ДЕФОРМАЦИИ ПОВЕРХНОСТИ И ЭКСТЕНЗОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575795C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ ПРЫЖКА СПОРТСМЕНА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ СПОРТСМЕНА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2007 |
|
RU2363382C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2021 |
|
RU2770896C1 |
Изобретение относится к измерительной технике, в частности к методам определения статического момента тел, преимущественно длинномерных, и может быть использовано для измерения статического момента лопаток турбомашин. Способ включает измерение реакции в измерительной опоре системы, установление нуля отсчета, закрепление длинномерного тела на балке и вычисление значения статического момента тела. Первоначально измеряется реакция в измерительной опоре без закрепленного на балке тела, и это положение принимается за ноль системы отсчета. Далее производят закрепление тела на балке между измерительной и фиксирующей опорами с возможностью двухпозиционного фиксированного расположения относительно фиксирующей опоры. Измеряют реакцию в измерительной опоре при расположении тела в первом положении. Затем перемещают тело из первого положения во второе. Измеряют реакцию в измерительной опоре при расположении тела во втором положении. Вычисляют вес тела Рл, координату центра тяжести а, статический момент Мс относительно базовой поверхности тела и определяют статический момент Mcr тела относительно любой базовой оси. Технический результат заключается в расширении функциональных возможностей способа. 1 ил.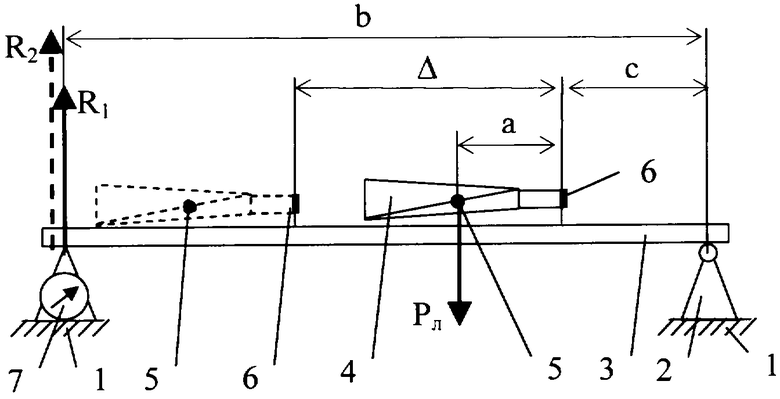
Способ определения статического момента тел, включающий измерение реакции в измерительной опоре системы, установление нуля отсчета, закрепление тела на балке и вычисление абсолютного значения статического момента тела, отличающийся тем, что установление нуля отсчета проводят сразу после измерения реакции в измерительной опоре, закрепление тела на балке осуществляют между измерительной и фиксирующей опорами, измеряют реакцию в измерительной опоре при расположении тела в первом положении, соответствующем одному расстоянию центра тяжести тела от фиксирующей опоры, перемещают тело из первого положения во второе, затем измеряют реакцию в измерительной опоре при расположении тела во втором положении, соответствующем другому расстоянию центра тяжести тела от фиксирующей опоры, вычисляют вес Рл тела, координату а центра тяжести и статический момент Мс относительно базовой поверхности тела, статический момент Мсr тела относительно любой базовой оси по соотношениям:


где R1 - величина реакции измерительной опоры в первом положении, соответствующем одному расстоянию центра тяжести тела от фиксирующей опоры, Н;
R2 - величина реакции измерительной опоры во втором положении, соответствующем другому расстоянию центра тяжести тела от фиксирующей опоры, Н;
b - расстояние между опорами, мм;
с - расстояние базовой поверхности тела от фиксирующей опоры при первом положении тела, мм;
Δ - расстояние между расположениями базовой поверхности тела, образующееся при расположении тела в первом положении и во втором, мм;
rл - расстояние от базовой поверхности тела до любой базовой оси, мм.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ЛОПАТОК | 2001 |
|
RU2204117C2 |
| Технология производства паровых и газовых турбин / Н.Я.Бауман, М.И.Яковлев, И.Н.Свечков | |||
| М.: Машиностроение, 1973 | |||
| Телефонная трансляция | 1922 |
|
SU464A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 1993 |
|
RU2089865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЛОПАТКИ ТУРБИНЫ | 2002 |
|
RU2224228C1 |

