Изобретение относится к области технической механики и может быть использовано для определения центра тяжести и веса твердых тел, имеющих продольную ось симметрии.
Известен способ определения координат центра тяжести тел, при котором тело устанавливают на две располагаемые на его продольной оси опоры, одна из которых служит измерительной, измеряют давление тела на измерительную опору, после чего другую опору перемещают вдоль указанной оси и вторично измеряют давление на первую опору, а по результатам обоих измерений вычисляют координаты центра тяжести тела /см. авторское свидетельство СССР №390396, G01M 1/12, 1973 г. - аналог/.
Известен способ определения веса и координат центра тяжести тел, в котором тело устанавливают вдоль его продольной оси на измерительную и поддерживающую опоры, измеряют давление тела на измерительную опору, затем изменяют положение поддерживающей опоры вдоль продольной оси тела, повторно измеряют давление тела на измерительную опору и по результатам обоих измерений вычисляют вес и координаты центра тяжести тела, при котором указанное изменение положения поддерживающей опоры осуществляют перемещением тела вдоль его оси, при этом заданное расстояние между опорами сохраняют /см. решение от 24.06.96 г., исх. №41-201 на №92015411/28 (062081) - о выдаче патента на изобретение по заявке "Способ определения веса и координат центра тяжести тел" №92015411 / 28(062081) от 30.12.92 г.; Скрипкин А.А. и др. - прототип/.
Техническим результатом и целью изобретения является повышение точности определения веса и координат центра тяжести тел при реализации способа.
Указанная цель достигается путем реализации заявленного способа при следующей последовательности действий, имеющей существенные отличия от способа - прототипа.
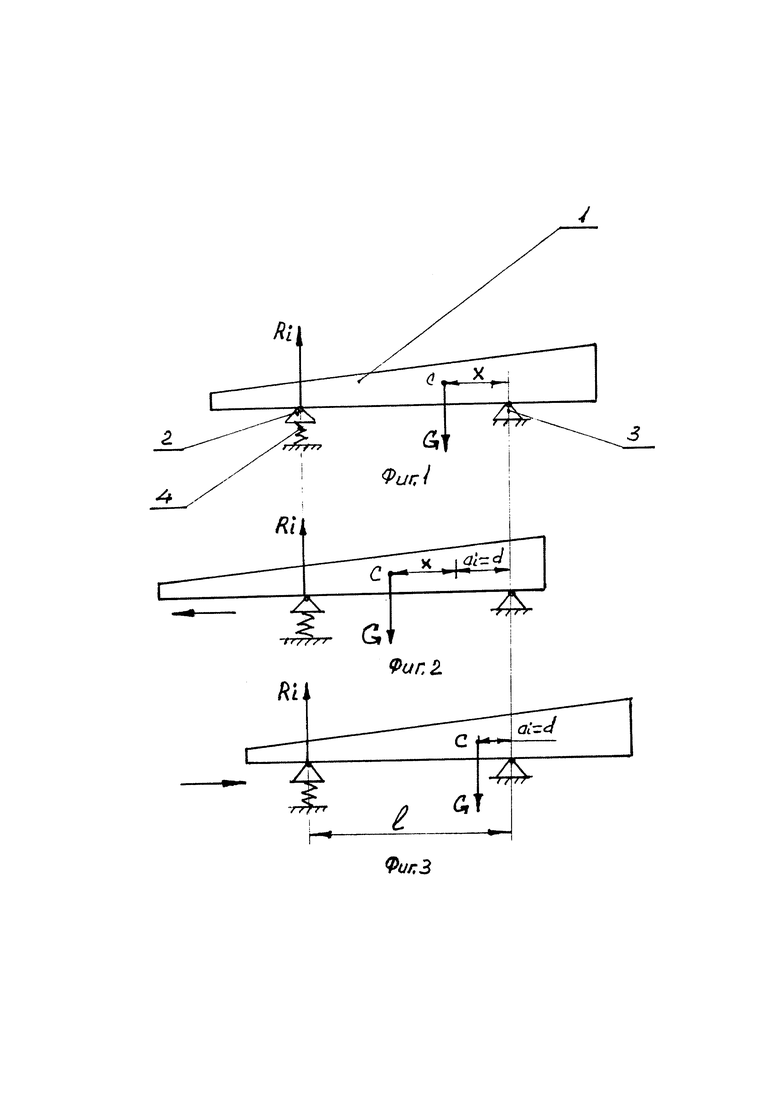
На фиг. 1, 2, 3 показана последовательность операций взвешивания при реализации способа.
Исследуемое тело 1 произвольно устанавливают на две призменные опоры 2 и 3; массивным концом - на поддерживающую опору 3, облегченным - на измерительную опору 2 с весоизмерительным устройством малой грузоподъемности 4, располагаемые на его продольной оси. При этом вес тела G и положение его центра тяжести "С", - координата относительно оси поддерживающей опоры 3, заранее неизвестны.
После этого тело 1 перемещают вдоль его оси на максимально возможное положительное расстояние ai=d влево относительно начального положения, принятого за нулевое, пока весовое устройство 4 еще может измерять, не зашкаливая, и есть упор на опоры 2 и 3, осуществляя при этом четное число измерений давления тела на измерительную опору Ri.
Затем тело 1 возвращают в принятое начальное положение и перемещают вдоль его оси на максимально возможное расстояние ai=d вправо относительно начального положения, принятого за нулевое, пока весовое устройство 4 еще может измерять, не зашкаливая, и есть упор на опоры 2 и 3, также осуществляя при этом четное число измерений давления тела на измерительную опору Ri и далее, составляя уравнения равновесия тела при известном расстоянии  между опорами 2 и 3, вычисляют координату X центра тяжести тела "С " и его вес G.
между опорами 2 и 3, вычисляют координату X центра тяжести тела "С " и его вес G.
Возможность реализации предлагаемого способа основывается на следующих соотношениях /фиг. 1, 2, 3/.
Запишем условие статического равновесия твердого тела, опирающегося как показано на фиг. 1 относительно опоры 3: исходя из того, что твердое тело неподвижно и, следовательно, сумма моментов равна нулю. Фактически, должны быть равны моменты реакции опоры и силы тяжести. При этом для повышения точности определения веса и положения центра тяжести твердого тела проводим серию измерений [см. Романов В.Н. Теория измерений. Основы теории точности средств измерений: Учебник. - СПб.: Изд-во СЗТУ, 2005. - 154 с.; Третьяк Л.Н. Обработка результатов наблюдений: Учебное пособие. - Оренбург: ГОУ ОГУ, 2004. - 171 с.]
При выполнении серии последовательных измерений, то есть, если смещать тело 1 на некоторые известные расстояния ai от исходного положения и производить измерения показаний весового устройства Ri, то в этом случае условие равновесия имеет вид:
 п
п
причем для любого i=0,1,…,n; где: n - число измерений со смещением тела, (например, n=12…32); а нулевой индекс соответствует измерению при a0=0. Вводя следующие обозначения  G=b1,
G=b1,  получаем линейную систему из (n+1) уравнения с двумя неизвестными, которая легко может быть решена по методу наименьших квадратов (МНК) [см. Вучков И.Н., Бояджиева Л.Н., Солаков Е.Б. Прикладной линейный регрессионный анализ. - М.: Финансы и статистика, 1987. - 239 с.; Определение массы и координат центра тяжести твердых тел. Скрипкин А.А., Львов А.А., Приказчиков Н.С., Мызрова Ю.Г. // Математические методы в технике и технологиях. 19 международная научно-техническая конференция. // Сборник трудов, Воронеж, ВГТУ, 2006., том 8, с. 58-60.].
получаем линейную систему из (n+1) уравнения с двумя неизвестными, которая легко может быть решена по методу наименьших квадратов (МНК) [см. Вучков И.Н., Бояджиева Л.Н., Солаков Е.Б. Прикладной линейный регрессионный анализ. - М.: Финансы и статистика, 1987. - 239 с.; Определение массы и координат центра тяжести твердых тел. Скрипкин А.А., Львов А.А., Приказчиков Н.С., Мызрова Ю.Г. // Математические методы в технике и технологиях. 19 международная научно-техническая конференция. // Сборник трудов, Воронеж, ВГТУ, 2006., том 8, с. 58-60.].
В векторной форме система (1) может быть записана следующим образом:

где: R=(R0, R1, …, Rn)T - вектор измерений реакций опоры, оснащенной весоизмерительным устройством, b=(b0, b1)T - вектор неизвестных, подлежащих оцениванию, Y - матрица плана эксперимента размера (n+1)*2, первый столбец которой состоит из одних единиц, а второй - из величин yi. Решение данной системы по МНК имеет вид:

При этом, зная оценки коэффициентов b0 и b1, несложно получить оценки искомых параметров, то есть веса и положения центра тяжести (ЦТ):

соответственно. Таким способом можно измерить массу твердого тела и координату его центра тяжести на весах малой грузоподъемности. Причем чем длиннее будет взвешиваемое тело, тем меньшую грузоподъемность могут иметь весовое устройство.
Полагая, что погрешности измерений величин Ri распределены по нормальному закону и независимы с нулевым средним и одинаковой дисперсией σ2, то дисперсионная матрица ошибок вектора оценок b будет иметь следующий вид:

Если детерминант данной матрицы достигает минимального значения, то оценки компонент b0 и b1 будут совместно эффективными с дисперсиями, соответствующими нижней границе Крамера-Рао. Минимум детерминанта обратной матрицы будет достигаться, когда детерминант прямой матрицы принимает максимальное значение. Из теории матриц известно, что это имеет место, когда столбцы матрицы плана эксперимента Y являются ортогональными, причем матрицы YTY и D[b] в этом случае становятся диагональными, [см. Гантмахер Ф.Р. Теория матриц. 5-е изд. - М.: Физматлит, 2010. - 560 с.].
Из вышесказанного следует, что это имеет место, если скалярное произведение столбцов матрицы плана эксперимента Y равно нулю, то есть  Данное условие будет выполнено, например, когда число n является четным, то есть, при этом половина измерений на весоизмерительном устройстве должна быть проведена с положительными значениями смещений ai, а другая половина - с такими же значениями ai, но имеющими отрицательные знаки. Тогда детерминант дисперсионной матрицы ошибок становится равным:
Данное условие будет выполнено, например, когда число n является четным, то есть, при этом половина измерений на весоизмерительном устройстве должна быть проведена с положительными значениями смещений ai, а другая половина - с такими же значениями ai, но имеющими отрицательные знаки. Тогда детерминант дисперсионной матрицы ошибок становится равным:

Он достигает минимального значения, когда сумма квадратов в знаменателе равна максимальному значению.
Из приведенных соотношений следует, что для повышения точности определения веса и положения центра тяжести твердого тела методически правильно проводить две серии измерений. Первая серия из n/2 измерений должна обеспечить максимально возможное положительное значение ai=d (твердое тело 1 смещается на максимально возможное расстояние d влево относительно некоторого положения, принятого за нулевое, пока весовое устройство 4 еще может измерять, не зашкаливая, и есть упор на опоры 2 и 3). Затем твердое тело возвращают в исходное положение и выполняют вторую серию из n/2 измерений при смещении тела 1 на такое же расстояние ai=d, но вправо относительно нулевого положения. При этом измерений в нулевом положении можно вообще не учитывать, поскольку они снижают значение суммы квадратов, что приводит к снижению точности измерений.
При такой методике значения оценок коэффициентов линейной регрессии b0 и bi могут быть получены из несколько более простых выражений:

Причем полученные значения оценок коэффициентов b0=G; b1=X соответственно равны искомому весу твердого тела и координате положения его центра тяжести, что однозначно решает поставленную задачу.
Из последних соотношений (6, 7) следует, что они могут быть реализованы с помощью достаточно простой микропроцессорной системы [см. Микропроцессорные системы. Уч. пособие // О.В. Непомнящий, Е.А. Вейсов, Г.А. Скотников, М.В. Савицкая. Изд-во Сиб. фед. ун-та, 2009. - 175 с.], функционирующей в комплексе с весоизмерительным устройством малой грузоподъемности.
Для простоты перемещения твердого тела 1 на поверхности призменных опор 2 и 3 могут быть установлены роликовые подшипники.
В качестве весоизмерительного устройства 4 могут быть использованы либо рычажные весы, либо измеритель веса, состоящий из датчиков давления (или тензометрических датчиков) и вычислителя, который может быть реализован на стандартных элементах вычислительной техники для определения по соотношениям (6) и (7) веса тела и координат его центра тяжести.
Расстояние ai=d перемещения твердого тела вдоль его продольной оси может быть отмечено на нем двумя метками при первоначальной установке тела 1 на опоры 2 и 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| СПОСОБ А. А. БОЛОТНИКОВА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ТЕЛ | 1973 |
|
SU390396A1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ТЕЛА | 2006 |
|
RU2332650C1 |
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| Способ определения веса отдельных частей неразделимого объекта | 1989 |
|
SU1703988A1 |
Изобретение относится к области технической механики и может быть использовано для определения центра тяжести и веса твердых тел. В способе тело устанавливают вдоль его продольной оси на измерительную и поддерживающую опоры, измеряют давление тела на измерительную опору, затем изменяют положение поддерживающей опоры вдоль продольной оси тела, повторно измеряют давление тела на измерительную опору и по результатам обоих измерений вычисляют вес и координаты центра тяжести тела, а изменение положения поддерживающей опоры осуществляют перемещением тела вдоль его оси, при этом заданное расстояние между опорами сохраняют. При этом тело вначале перемещают вдоль его оси на максимально возможное положительное расстояние, например влево относительно начального положения, принятого за нулевое, осуществляя при этом четное число измерений давления тела на измерительную опору, а затем тело возвращают в принятое начальное положение и перемещают вдоль его оси на максимально возможное расстояние вправо относительно начального положения, принятого за нулевое, также осуществляя при этом четное число измерений давления тела на измерительную опору, и по результатам обоих серий измерений вычисляют вес и координаты центра тяжести тела. Техническим результатом является повышение точности определения веса и координат центра тяжести тел при реализации способа. 3 ил.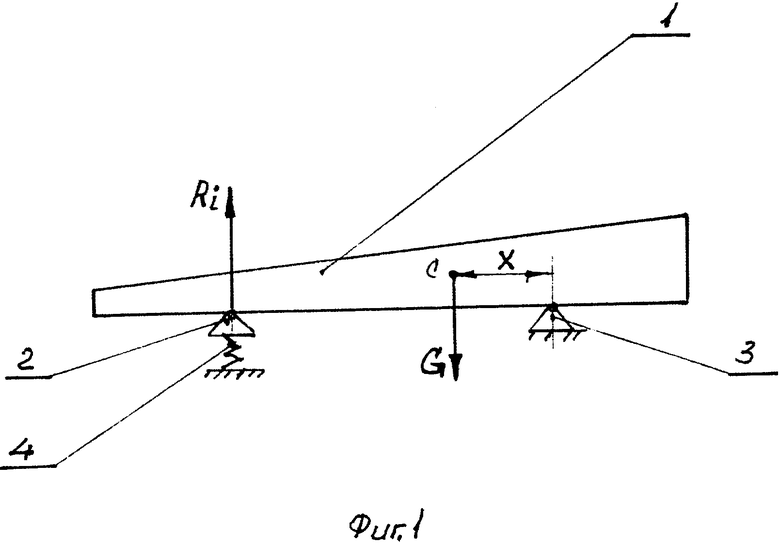
Способ определения веса и координат центра тяжести тел, в котором тело устанавливают вдоль его продольной оси на измерительную и поддерживающую опоры, измеряют давление тела на измерительную опору, затем изменяют положение поддерживающей опоры вдоль продольной оси тела, повторно измеряют давление тела на измерительную опору и по результатам обоих измерений вычисляют вес и координаты центра тяжести тела, а изменение положения поддерживающей опоры осуществляют перемещением тела вдоль его оси, при этом заданное расстояние между опорами сохраняют, отличающийся тем, что тело вначале перемещают вдоль его оси на максимально возможное положительное расстояние, например влево относительно начального положения, принятого за нулевое, осуществляя при этом четное число измерений давления тела на измерительную опору, а затем тело возвращают в принятое начальное положение и перемещают вдоль его оси на максимально возможное расстояние вправо относительно начального положения, принятого за нулевое, также осуществляя при этом четное число измерений давления тела на измерительную опору, и по результатам обоих серий измерений вычисляют вес и координаты центра тяжести тела.
| RU 93047208 A, 20.07.1996 | |||
| Кипоразрыхлитель-смеситель | 1953 |
|
SU100615A1 |
| Весовое устройство для определения взлетной массы и взлетной центровки самолета и способ определения взлетной массы и взлетной центровки самолета (варианты) | 2018 |
|
RU2688575C1 |
| СПОСОБ А. А. БОЛОТНИКОВА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ТЕЛ | 0 |
|
SU390396A1 |
| Аппарат для разбавления патоки | 1940 |
|
SU62238A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ТЕЛА | 2006 |
|
RU2332650C1 |
| CN 108204849 A, 26.06.2018. | |||

