Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, заключающийся в том, что по измеренной частоте вращения ротора двигателя по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) компрессора двигателя, в соответствии с ним α до заданной частоты вращения удерживают лопатки ВНА в положении «закрыто», после выхода двигателя на режимы, где частота вращения выше заданной, устанавливают лопатки ВНА в положении «открыто», Черкасов Б.А. «Автоматика и регулирование ВРД», М., «Машиностроение», 1965 г., с.176-177.
Недостатком известного способа является его низкая эффективность с точки зрения обеспечения требуемых запасов газодинамической устойчивости (ГДУ) компрессора и, как следствие, невозможность использования для управления современными ГТД, а именно турбореактивными двигателями с высокой степенью двухконтурности (ТРДД), такими, например, как двигатели семейства ПС-90А.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный в электронном регуляторе (ЭР), входящем в состав САУ двигателя ПС-90А2, заключающийся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по известной зависимости формируют заданное положение лопаток ВНА компрессора двигателя, сравнивают его с измеренным положение лопаток ВНА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток ВНА, Техническое задание №17664 на разработку системы топливопитания, автоматического управления и контроля двигателя ПС-90А2, ОАО «Авиадвигатель», г.Пермь, 2002 г., с.42.
Недостатком этого способа является следующее.
При отказе датчика положения лопаток ВНА управление двигателем переводится с ЭР на резервный гидромеханический регулятор (ГМР).
При этом сохраняется возможность управления двигателем от ЭР, т.к. входные и выходные преобразователи и вычислитель ЭР исправны, блок исполнительных механизмов (ИМ) ЭР исправен.
Перевод управления на ГМР снижает качество управления двигателем, т.к.
- номенклатура датчиков ЭР и ГМР не совпадает (перевод управления на ГМР сопровождается изменением режима работы двигателя);
- точностные характеристики датчиков ЭР лучше, чем у ГМР (при переводе управления на ГМР снижается точность поддержания регулируемых параметров двигателя);
- законов управления, реализованных в ГМР, меньше по количеству и точность их поддержания ниже (при переводе на ГМР увеличивается скорость выработки ресурса двигателя).
Дополнительно при переводе управления двигателем на ГМР теряются очень важные функции, такие, например, как защита турбины от перегрева и защита двигателя от помпажа и расцепки валов компрессора и турбины.
Это, в свою очередь, приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ГТД, заключающемся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по известной зависимости формируют заданное положение лопаток ВНА компрессора двигателя, сравнивают его с измеренным положение лопаток ВНА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток ВНА, дополнительно при отказе датчика положения лопаток ВНА по измеренным давлениям воздуха на входе в двигатель и за компрессором двигателя определяют фактическую степень сжатия воздуха в компрессоре, по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют заданное значение степени сжатия, по величине рассогласования между заданным и измеренным значениями степени сжатия формируют управляющее воздействие на привод лопаток ВНА и изменяют положение ВНА до тех пор, пока фактическая степень сжатия не станет равной заданной.
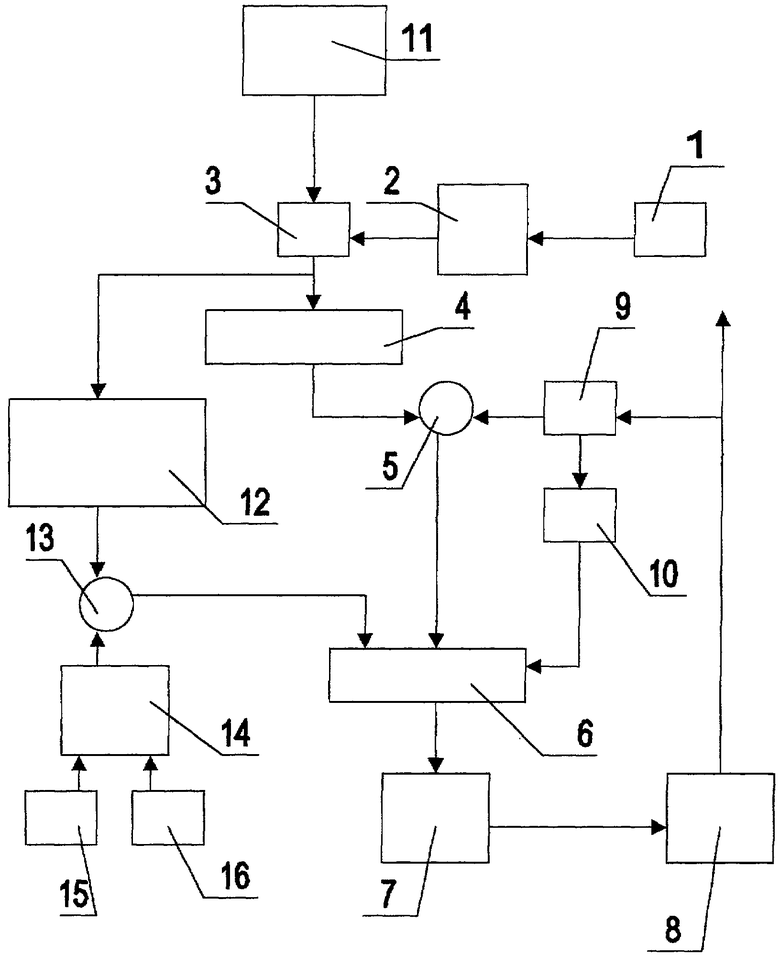
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные датчик 1 температуры (Твх.) воздуха на входе в двигатель, блок 2 приведения, блок 3 умножения (БУ), задатчик 4 положения ВНА, первый сумматор 5, переключатель 6, электрогидропреобразователь 7 (ЭГП), сервомотор 8, датчик 9 положения ВНА, выход которого подключен ко второму входу сумматора 5 и блоку 10 контроля, выход блока 10 подключен к управляемому входу переключателя 6, второй вход БУ 3 подключен к выходу датчика 11 частоты вращения ротора двигателя (n), а выход - через задатчик 12 степени сжатия в компрессоре (π к Σ) и второй сумматор 13 - ко второму информационному входу переключателя 6, ко второму входу сумматора 13 подключен выход блока 14 деления (БД), на вход которого подключены датчики давления воздуха 15 на входе в двигатель и 16 за компрессором двигателя.
Устройство работает следующим образом.
При исправном датчике 9 управление ВНА осуществляется по программе

где
α на зад. - заданное положение ВНА;
n - частота вращения ротора двигателя;
Твх. - температура воздуха на входе в двигатель.
Заданное положение ВНА формируется в задатчике 4: по приведенной частоте (nпр) вращения ротора двигателя, формируемой по сигналам Твх. (от датчика 1) и n (от датчика 11) в БУ 3 с помощью блока 2.
Сигнал α на зад. поступает в сумматор 5, где сравнивается с измеренным положением ВНА (от датчика 9). Величина рассогласования между заданным и измеренным значениями поступает на вход переключателя 6.
При исправном датчике 9 положения ВНА (его состояние оценивает БВК 10 по известным принципам, см., например [3]) сигнала с выхода БВК 10 нет, переключатель 6 находится в положении, при котором на вход ЭГП 7 подается сигнал с выхода сумматора 5.
По величине рассогласования между заданным и измеренным значениями ВНА ЭГП 7 осуществляет управление ВНА с помощью сервомотора 8. Таким образом, обеспечивается управление ВНА по приведенной частоте вращения ротора двигателя.
Дополнительно в задатчике 12 по приведенной частоте вращения двигателя (из БУ 3) формируют заданное значение степени сжатия

где
π к Σ зад. - заданная степень сжатия воздуха в компрессоре двигателя;
n - частота вращения ротора двигателя;
Твх. - температура воздуха на входе в двигатель.
По измеренным давлениям воздуха на входе в двигатель (из датчика 15) и за компрессором двигателя (из датчика 16) в БД 14 определяют фактическую степень сжатия воздуха в компрессоре.
В сумматоре 13 определяют величину рассогласования между заданным и измеренным значениями степени сжатия.
При отказе датчика 9, обнаруженном БВК 10, на выходе БВК 10 формируется сигнал, по которому переключатель 6 перекладывается в положение, при котором на вход ЭГП 7 подается сигнал с выхода сумматора 13.
При этом по величине рассогласования между заданным и измеренным значениями степени сжатия ЭГП 7 с помощью сервомотора 8 подает управляющее воздействие на привод лопаток ВНА и изменяет положение ВНА до тех пор, пока фактическая степень сжатия не станет равной заданной.
Таким образом, обеспечивается управление ВНА по степени сжатия в компрессоре двигателя без перевода управления на резервный ГМР, т.е. обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2432475C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2416035C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2416036C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что при отказе датчика положения лопаток ВНА по измеренным давлениям воздуха на входе в двигатель и за компрессором двигателя определяют фактическую степень сжатия воздуха в компрессоре, по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют заданное значение степени сжатия, по величине рассогласования между заданным и измеренным значениями степени сжатия формируют управляющее воздействие на привод лопаток ВНА и изменяют положение ВНА до тех пор, пока фактическая степень сжатия не станет равной заданной. Технический результат изобретения - повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 1 ил.
Способ управления газотурбинным двигателем, заключающийся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по приведенной частоте формируют заданное положение лопаток входного направляющего аппарата (ВНА) компрессора двигателя, сравнивают его с измеренным положением лопаток ВНА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток ВНА, отличающийся тем, что дополнительно при отказе датчика положения лопаток ВНА по измеренным давлениям воздуха на входе в двигатель и за компрессором двигателя определяют фактическую степень сжатия воздуха в компрессоре, по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют заданное значение степени сжатия, по величине рассогласования между заданным и измеренным значениями степени сжатия формируют управляющее воздействие на привод лопаток ВНА и изменяют положение ВНА до тех пор, пока фактическая степень сжатия не станет равной заданной.
| ПАРАШЮТ ДЛЯ ШАХТНЫХ КЛЕТЕЙ | 1929 |
|
SU17664A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| RU 2007107753 A, 10.09.2008 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| СПОСОБ ЗАЩИТЫ КОМПРЕССОРА ОТ ПОМПАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303716C2 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |
| US 4794755 A, 03.01.1989. | |||

