Изобретение относится к области определения азимута заданного направления и может быть использовано в гирокомпасах аналитического типа при решении задач геодезии, навигации, топографии, прицеливания и наведения.
Известны способы определения азимута (истинного курса) с помощью гироскопического датчика угловой скорости (ДУС) путем измерения проекций горизонтальной составляющей угловой скорости вращения Земли на оси чувствительности (одну или две) датчика [1-3]. Основу способов составляет последовательная процедура предварительной выставки осей чувствительности в горизонт, поворота осей на заданные углы, определения показаний осей и вычисления азимута с использованием полученных показаний. При этом обеспечивается автокомпенсация систематических погрешностей ДУС, а также минимизация ошибки горизонтирования и времени проведения измерений.
Недостатком способов [1-3] является существенный рост ошибки определения азимута по мере увеличения широты местоположения ДУС. Значительной ошибка становится в высокоширотных приполярных и полярных областях, что особенно нежелательно в интенсивно осваиваемых арктических зонах. Обусловлено это тем, что при измерениях используется только горизонтальная составляющая угловой скорости вращения Земли и не задействуется ее вертикальная составляющая. С увеличением широты местоположения ДУС величина горизонтальной составляющей и ее измеряемых проекций падает, достигая минимальных значений в высокоширотных областях. Как результат, существенно возрастает случайная по природе инструментальная погрешность измерений, значение которой на практике при использовании конкретного измерительного инструмента тем выше, чем меньше значение фиксируемой величины.
Наиболее близким по технической сущности к заявляемому способу является способ определения азимута с помощью одноосевого датчика угловой скорости [4], заключающийся в предварительной выставке оси чувствительности ДУС в вертикаль, последующей установке оси чувствительности поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол ε, считывании в каждом из четырех положений показаний ДУС и вычислении азимута направления первого положения оси чувствительности по формуле:

где Ω1, Ω.2, Ω3, Ω4 - показания ДУС, пронумерованные по часовой стрелке относительно первого положения оси чувствительности датчика.
Принципиальным отличием способа-прототипа [4] от аналогов [1-3] является включение в состав показаний Ω1, Ω.2, Ω3, Ω4, помимо горизонтальных проекций ωгsinεcosA, -ωгsinεsinA, -ωrsinεcosA, ωгsinεsinA, одинаковой для всех четырех положений оси чувствительности вертикальной проекции concose Здесь ωг=ωз cosϕ, ωв=ωзsinϕ - горизонтальная и вертикальная составляющие угловой скорости вращения Земли ωз, ϕ - широта местоположения ДУС.
Способ [4] обеспечивает независимость результата расчета азимута А по формуле (1) от значений масштабного коэффициента и нулевого сигнала ДУС, а также от величины угла поворота ε. Единственным фактором, влияющим на точность определения азимута А, являются погрешности, обусловленные случайными ошибками Δω измерения горизонтальных проекций угловой скорости вращения Земли.
Важно отметить, что промежуточные показания Ω1, Ω.2, Ω3, Ω4 содержат числовую подставку в виде вертикальной проекции ωвcosε, чем обеспечивается малое значение инструментальной погрешности в составе случайных ошибок Δω фиксируемых горизонтальных проекций. Как отмечалось, это особенно важно при малых значениях указанных проекций. При этом итоговые вычисления по формуле (1) устраняют непосредственное влияние неинформативной вертикальной проекции ωвcosε на конечный результат расчета значения азимута А.
Согласно способу [4], среднеквадратическая погрешность (СКП) определения азимута σΔА связана с СКП измерения угловой скорости σΔА соотношением:

где  - коэффициент влияния ошибок измерений на точность определения азимута.
- коэффициент влияния ошибок измерений на точность определения азимута.
Из соотношения (2) следует, что при прочих равных условиях угол поворота ε является фактором, определяющим точность вычисления азимута. Иными словами, значение СКП σΔА зависит от выбора этого угла. С одной стороны, величину ε необходимо выбирать максимально возможной (в пределе до 90°) для повышения точности определения азимута за счет сохранения значимых значений горизонтальных проекций угловой скорости вращения Земли. С другой - минимально допустимой (в пределе до 0°) для получения достаточной числовой подставки в виде вертикальной проекции ωвcosε.
Таким образом, необходимо компромиссное правило выбора и установки угла поворота ε. Однако в способе-прототипе такое правило отсутствует. Это является существенным недостатком способа [4].
Цель заявляемого изобретения состоит в разработке правила выбора и установки угла ε между вертикалью и осью чувствительности ДУС при определении азимута по показаниям ДУС в четырех последовательных ортогональных положениях оси чувствительности.
Для достижения указанной цели в способе определения азимута с помощью ДУС, заключающемся в предварительной выставке оси чувствительности ДУС в вертикаль, последующей установке оси чувствительности поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол ε, считывании в каждом из четырех положений показаний ДУС и вычислении по указанным показаниям азимута направления первого положения оси чувствительности, дополнительно используют навигационный прибор, с помощью которого определяют широту ϕ местоположения ДУС, угол поворота ε устанавливают из условия обеспечения требуемой СКП σΔАтреб определения азимута при известной широте ϕ и заданной СКП σΔАлзад измерения угловой скорости ДУС, при этом угол ε вычисляют по формуле

Технический результат заключается в обеспечении требуемой точности определения азимута. При этом мерой точности служит величина СКП ωΔАтреб.
Математическое обоснование заявляемого способа заключается в следующем.
В соответствии с соотношением (2) максимальная точность определения азимута (минимальное значение СКП ωΔА) достигается при минимальном значении коэффициента влияния k(ϕ,ε). Исследование функции k(ϕ,ε) двух переменных ϕ, ε на экстремум [5] показывает, что необходимому условию существования экстремума (минимума):

где  , соответствует критическая точка (точка возможного экстремума) М0=(ϕ0,ε0) при ϕ0=0°, ε0=90°. Однако достаточному условию экстремума точка М0 не удовлетворяет, поскольку вторые частные производные функции k(ϕ,ε) в этой точке:
, соответствует критическая точка (точка возможного экстремума) М0=(ϕ0,ε0) при ϕ0=0°, ε0=90°. Однако достаточному условию экстремума точка М0 не удовлетворяет, поскольку вторые частные производные функции k(ϕ,ε) в этой точке:
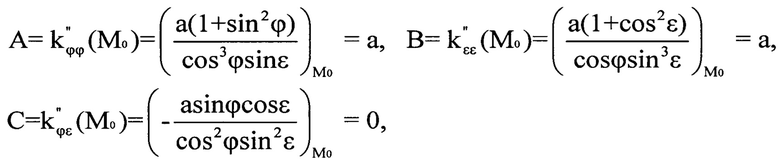
откуда АС-В2=-а2<0, что свидетельствует об отсутствии безусловного экстремума функции k(ϕ,ε).
В таком случае следует решать задачу достижения требуемой точности определения азимута (требуемого значения СКП σΔAтреб) при условии фиксированной широты ϕ (определяется дополнительным навигационным прибором) и заданной СКП σΔAзад измерения угловой скорости (точностная характеристика используемого ДУС). Искомым решением задачи является угол поворота ε, обеспечивающий требуемую точность. В результате от соотношения (2) приходим к формуле (3).
Возможности способа по определению угла ε иллюстрируют следующие результаты расчетов.
Расчеты были проведены в рамках числового примера, рассмотренного в способе-прототипе [4], а именно: требуемая СКП определения азимута σΔAтреб равнялась 0, 001 рад (3 угл. мин), заданная СКП σΔAзад измерения угловой скорости ДУС (чувствительность ДУС по терминологии способа [4]) - 0,005 угл. сек/сек. Использованное значение σΔωзад соответствует точностным характеристикам выбранных в [4] отечественных образцов ДУС ВОГ951 и 500ПН ПИК, а также большинства современных отечественных и зарубежных ДУС волоконно-оптического типа среднего класса точности.
Результаты расчетов представлены в Табл. 1, из которой следует, что при указанных исходных данных угол ε, обеспечивающий требуемую точность определения азимута, меняется в широких пределах в зависимости от широты ϕ местоположения ДУС. При этом, начиная с широты ϕ=75,5° (приблизительно), рассматриваемая задача решения не имеет, т.е. использовать способ с выбранными образцами ДУС в приполярных областях нецелесообразно.

Дополнительно для сравнения проведены аналогичные расчеты для высокоточного лазерного гироскопа модификации ZLG компании Northrop Grumman (США), характеризующегося величиной СКП σΔAзад=0,0015 утл.сек/сек (Табл. 2). Сравнение результатов таблиц показывает, что с ростом точности ДУС абсолютные значения и диапазон изменения угла ε снижаются. При этом существенно расширяется область широт ϕ (до 85,5° приблизительно), где применение способа целесообразно.

Из приведенных материалов следует, что заявляемый способ содержит конструктивное правило выбора и установки угла поворота ε и позволяет дать практические рекомендации по использованию конкретных образцов ДУС для определения азимута в различных широтах.
Таким образом, заявляемый способ может быть реализован и обеспечивает требуемую точность определения азимута.
Источники информации:
1. Патент RU 2098766.
2. Патент RU 2300078.
3. Патент RU 2560742.
4. Патент RU 2340875.
5. Алгоритм исследования функции двух переменных на экстремум. - Режим доступа: https://math.semestr.ru/math/extremum.php.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА С ПОМОЩЬЮ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2340875C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2737383C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Способ гирокомпасирования с применением датчика угловой скорости | 2018 |
|
RU2698567C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2020 |
|
RU2753900C1 |
| ГИРОИНКЛИНОМЕТР ДЛЯ ПРОВЕДЕНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СЪЕМКИ И СПОСОБ ЕЁ ПРОВЕДЕНИЯ | 2024 |
|
RU2829726C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
Изобретение относится к области определения азимута заданного направления и может быть использовано в гирокомпасах аналитического типа при решении задач геодезии, навигации, топографии, прицеливания и наведения. Способ определения азимута с помощью датчика угловой скорости (ДУС) заключается в предварительной выставке оси чувствительности ДУС в вертикаль, последующей установке оси чувствительности поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол ε, считывании в каждом из четырех положений показаний ДУС и вычислении по указанным показаниям азимута направления первого положения оси чувствительности. При этом дополнительно используют навигационный прибор, с помощью которого определяют широту ϕ местоположения ДУС, угол поворота ε устанавливают из условия обеспечения требуемой среднеквадратической погрешности (СКП) определения азимута при известной широте ϕ и заданной СКП измерения угловой скорости ДУС, при этом угол ε вычисляют по формуле
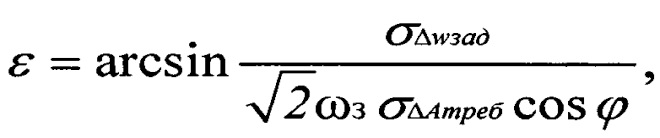
где σΔAтреб - требуемая СКП определения азимута, σΔwзад - заданная СКП измерения угловой скорости ДУС, ωз - угловая скорость вращения Земли. Технический результат – повышение точности определения азимута. 2 табл.
Способ определения азимута с помощью датчика угловой скорости (ДУС), заключающийся в предварительной выставке оси чувствительности ДУС в вертикаль, последующей установке оси чувствительности поворотом от вертикали в четыре положения, расположенные в двух вертикальных ортогональных плоскостях и имеющие с вертикалью одинаковый ненулевой острый угол ε, считывании в каждом из четырех положений показаний ДУС и вычислении по указанным показаниям азимута направления первого положения оси чувствительности, отличающийся тем, что дополнительно используют навигационный прибор, с помощью которого определяют широту ϕ местоположения ДУС, угол поворота ε устанавливают из условия обеспечения требуемой среднеквадратической погрешности (СКП) определения азимута при известной широте ϕ и заданной СКП измерения угловой скорости ДУС, при этом угол ε вычисляют по формуле
где σΔAтреб - требуемая СКП определения азимута, σΔwзад - заданная СКП измерения угловой скорости ДУС, ωз - угловая скорость вращения Земли.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА С ПОМОЩЬЮ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2340875C1 |
| RU 2063611 C1, 10.07.1996 | |||
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА НАКЛОННОГО ОБЪЕКТА С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2001 |
|
RU2188392C1 |
| US 8151475 B2, 10.04.2012. | |||

