ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области точного приборостроения, в частности к гироинклинометру для проведения гироинклинометрической съемки ранее пробуренных обсаженных скважин.
УРОВЕНЬ ТЕХНИКИ
Гироинклинометрическая съемка имеет широкий спектр применений и играет ключевую роль в различных отраслях, где требуется точное измерение углов наклона и ориентации в пространстве. Данные, полученные посредством инклинометрической съемки, могут быть использованы, например, для построения траектории скважины в той или иной земной системе координат и определения её положения относительно геологических слоев, что позволяет планировать дальнейшие инженерные работы, контролировать отклонения скважины, определять необходимость коррекции её траектории, а также осуществлять другие инженерно-геологические расчёты. Гироинклинометрическая съемка также находит широкое применение в ранее пробуренных обсаженных скважинах различного назначения с целью окончательной паспортизации ее траектории для реестровых документов или «зарезки» бокового ствола для увеличения коэффициента извлечения полезных ископаемых.
В настоящее время можно выделить два основных метода, используемых при выполнении гироинклинометрической съемки, - гирокомпасирование и гироазимутальное ориентирование, осуществляемые на практике посредством гироинклинометра (ГИ).
Гирокомпасирование осуществляется в точечном режиме работы ГИ, что подразумевает проведение измерений на остановках ГИ в требуемых точках траектории скважины. В свою очередь, гироазимутальное ориентирование выполняется в непрерывном режиме работы ГИ, что подразумевает непрерывное проведение измерений углов при спуске ГИ с некоторой скоростью. При проектировании ГИ необходимо учитывать, что в процессе съемки он подвержен влиянию вибраций и ударов, и это может негативно сказываться на точности измерений и эксплуатационной надежности ГИ. В частности, можно отметить, что интенсивные ударные воздействия возникают в процессе выставки клина-отклонителя при зарезке бокового ствола из ранее пробуренного вертикального. Такие ударные воздействия возникают при срезании шпильки посредством специальной оснастки, закрепляющей корпус ГИ на теле клина-отклонителя, в процессе зарезки бокового ствола, а одним из способов их минимизации является использование в составе ГИ компонентов, обладающих высокой вибро- и удароустойчивостью.
Как правило, состав ГИ включает наземную аппаратуру, геофизический кабель (или иные - трос и т.д. - средства доставки на забой и связи с забоем) и скважинный прибор. Последний обязательно должен содержать датчики угловой скорости (ДУС) и трехосный акселерометр, обычно именуемые чувствительными элементами (ЧЭ), а также различные устройства запуска и управления ГИ и его составных частей. ДУС, обеспечивающий возможность получения информации об абсолютной угловой скорости, необходимой для расчета, прежде всего, азимутальной ориентации исследуемого объекта, как в точечном, так и в непрерывном режиме, является ключевым элементом ГИ. При выборе ДУС, кроме характерной для него точности, необходимо принять во внимание, как уже указывалось выше, требования по вибро- и удароустойчивости, а также уровень температуры на забое, в совокупности во многом определяющие эксплуатационную надежность ГИ в целом. В настоящее время ДУСом, наиболее часто используемым при построении ГИ, является двухосный динамически настраиваемый гироскоп (ДНГ).
Известен гироинклинометр, раскрытый в патенте RU 124731 U1 (10.02.2013). Известный ГИ содержит наземную аппаратуру и скважинный прибор, в измерительную систему которого входят три акселерометра и динамически настраиваемый гироскоп, энкодер и система термостатирования.
Недостатком известного ГИ является использование двухосного ДНГ, который обладает низкой виброустойчивостью и удароустойчивостью, что оказывает критическое влияние на точность измерений, осуществляемых ГИ, вследствие постепенной деградации ДНГ от вибраций и ударов, а также на эксплуатационную надежность ГИ, особенно в условиях инклинометрической съемки. Низкие виброустойчивость и удароустойчивость обусловлены наличием упругого подвеса в составе двухосного ДНГ: при сильных ударах или столкновениях упругий подвес может деформироваться или сломаться, что может повредить ДНГ и привести к его выходу из строя с необходимостью замены или ремонта ДНГ, сопряженных с дополнительными расходами и простоем оборудования. Для устранения вышеупомянутых недостатков в известном решении предусмотрены пружинные центраторы, предназначенные для повышения виброударопрочности и ударопрочности скважинного прибора. Однако такие меры, с одной стороны, влекут за собой усложнение конструкции ГИ, а с другой - не позволяют полностью нивелировать недостатки ДНГ в отношении виброустойчивости и удароустойчивости, связанные непосредственно с конструкцией ДНГ.
Наиболее близким аналогом настоящего изобретения является решение, раскрытое в статье “Аналитическое компасирование в инклинометрии скважин малого диаметра”. Биндер Я.И. Гироскопия и навигация. 2003. No 2 (41). С. 38-46. В статье раскрыта возможность осуществления гирокомпансирования с использованием двухосного или двух одноосных ДУС, а также алгоритмы расчета азимута скважины. В статье рассмотрены возможные схемы реализации: трехосная с полным набором ДУС и двухосная, содержащая один двухосный или два одноосных ДУС. Вместе с тем, согласно информации, приведенной в статье, двухосная схема направлена на устранение проблем, связанных с реализацией трехосной схемы для скважин малого диаметра и обусловленных тем, что гироскопы имеют, как правило, осевое (цилиндрическое) конструктивное исполнение, и реализация измерения по поперечной оси оказывается затруднительной.
Можно выделить следующие недостатки схем, описанных в известной статье. Одним из недостатков является применение двухосного ДУС по причинам, приведенным в отношении решения, раскрытого в патенте RU 124731 U1, другим недостатком является использование двух одноосных ДУС, что подразумевает реализацию двух отдельных каналов измерения абсолютной угловой скорости, которая влечет за собой усложнение конструкции ГИ, сопряженное с увеличением стоимости ГИ и уменьшением эксплуатационной надёжности прибора. Несмотря на известность использования двух одноосных ДУС в известной статье не рассмотрено влияние использования одноосного ДУС в составе ГИ на устранение недостатков двухосного ДУС в отношении виброустойчивости и удароустойчивости, характеризующих эксплуатационную надежность ГИ.
Таким образом, ввиду недостатков известных решений, техническая проблема заключается в низкой эксплуатационной надежности ГИ, сложности конструктивного исполнения ГИ.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Указанная техническая проблема решена предлагаемыми гироинклинометром (ГИ) для проведения инклинометрической съемки, способом проведения инклинометрической съемки при точечном режиме работы гироинклинометра и способом проведения инклинометрической съемки при непрерывном режиме работы гироинклинометра.
Согласно первому аспекту изобретения, предлагаемый ГИ для проведения инклинометрической съемки содержит цилиндрический корпус, содержащий поворотную рамку, выполненную с возможностью вращения вокруг своей оси вращения относительно цилиндрического корпуса, причем ось вращения поворотной рамки совпадает с продольной осью цилиндрического корпуса, датчик угла, выполненный с возможностью измерения угла положения поворотной рамки относительно цилиндрического корпуса, привод рамки, выполненный с возможностью вращения поворотной рамки и с возможностью управления им посредством управляющего сигнала, получаемого с вычислителя, трехосный акселерометр, размещенный на поворотной рамке таким образом, что одна из его осей совпадает с осью вращения поворотной рамки, и выполненный с возможностью измерения угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла, одноосный датчик угловой скорости, который размещён на поворотной рамке и ось чувствительности которого расположена перпендикулярно оси вращения поворотной рамки и лежит в плоскости поперечного сечения цилиндрического корпуса.
Технический результат заключается в повышении эксплуатационной надежности ГИ и упрощении конструкции ГИ. Указанный технический результат достигается благодаря тому, что ГИ для проведения съемки содержит датчик угла, выполненный с возможностью измерения угла положения рамки относительно цилиндрического корпуса, привод рамки, выполненный с возможностью вращения поворотной рамки и с возможностью управления им посредством управляющего сигнала, получаемого с вычислителя, трехосный акселерометр размещенный на поворотной рамке таким образом, что одна из его осей совпадает с осью вращения поворотной рамки, и выполненный с возможностью измерения угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла.
В частности, в точечном режиме работы ГИ датчик угла позволяет управлять положением поворотной рамки, что обеспечивает возможность снятия показаний с одноосного датчика угловой скорости, который размещён на поворотной рамке и ось чувствительности которого расположена перпендикулярно оси вращения поворотной рамки и лежит в плоскости поперечного сечения цилиндрического корпуса. Также в точечном режиме может быть устранено влияние не зависящих от ускорения (т.н. «корпусных») дрейфов датчика угловой скорости за счет дополнительных поворотов поворотной рамки.
В непрерывном режиме работы ГИ привод рамки и трехосный акселерометр обеспечивают возможность нахождения поворотной рамки в положении, соответствующем нулевому значению угла отклонителя, что обеспечивает возможность снятия показаний с одноосного датчика угловой скорости, расположенного на поворотной рамке таким образом, что ось чувствительности одноосного датчика угловой скорости расположена перпендикулярно оси вращения поворотной рамки и лежит в плоскости поперечного сечения цилиндрического корпуса. В частности, привод рамки обеспечивает возможность поворота поворотной рамки в положение, соответствующее нулевому значению угла-отклонителя, а трехосный акселерометр обеспечивает возможность контроля нахождения поворотной рамки в указанном положении. В частности, показания, снимаемые с трехосного акселерометра, позволяют получить информацию относительно угла положения поворотной рамки, что позволяет отслеживать положение поворотной рамки относительно апсидиальной плоскости скважины.
Вышеописанная возможность использования одноосного ДУС в составе ГИ позволяет упростить конструкцию ГИ, а также повысить эксплуатационную надежность ГИ, обусловленную характеристиками одноосного ДУС.
Согласно одному варианту осуществления изобретения, гироинклинометр для проведения инклинометрической съемки также содержит указанный вычислитель.
Согласно второму аспекту изобретения, предлагаемый способ проведения инклинометрической съемки при точечном режиме работы гироинклинометра по первому аспекту включает остановку указанного гироинклинометра в начальном положении в скважине; измерение проекций вектора силы тяжести посредством трехосного акселерометра; расчет в начальном положении угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла по измеренным проекциям вектора силы тяжести; измерение угла положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла; измерение проекции ω1 вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости; поворот поворотной рамки посредством привода рамки на угол 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла; измерение проекции ω2 вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости; расчет азимута скважины на основании указанных угла положения поворотной рамки относительно апсидиальной плоскости скважины в начальном положении, зенитного угла в начальном положении, проекции ω1 вектора угловой скорости вращения Земли и проекции ω2 вектора угловой скорости вращения Земли.
Согласно одному из вариантов осуществления изобретения, способ проведения инклинометрической съемки при точечном режиме работы гироинклинометра по первому аспекту включает после операции измерения проекции ω2 вектора угловой скорости вращения Земли поворот поворотной рамки посредством привода рамки на углы кратные 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла с измерением проекции ω вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости в каждом получаемом положении поворотной рамки относительно цилиндрического корпуса, причём указанный расчёт азимута скважины производят также на основании измеренных проекций ω вектора угловой скорости вращения Земли в указанном каждом получаемом положении поворотной рамки относительно цилиндрического корпуса.
Согласно еще одному варианту осуществления изобретения, способ проведения инклинометрической съемки при точечном режиме работы гироинклинометра по первому аспекту включает после операции измерения проекции ω2 вектора угловой скорости вращения Земли поворот поворотной рамки посредством привода рамки на угол 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла с измерением проекции ω вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости в получаемом положении поворотной рамки относительно цилиндрического корпуса расчет систематической погрешности τ датчика угловой скорости на основании проекций вектора угловой скорости Земли в положениях поворотной рамки, отличающихся на 180° и учет указанной погрешности τ при расчете азимута скважины.
Согласно различным вариантам осуществления настоящего изобретения, поворот поворотной рамки посредством привода рамки относительно цилиндрического корпуса осуществляют на основании управляющего сигнала, получаемого от вычислителя.
Согласно различным вариантам осуществления настоящего изобретения, расчет в начальном положении угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла и расчет азимута скважины осуществляют посредством вычислителя.
Согласно третьему аспекту изобретения, предлагаемый способ проведения инклинометрической съемки при непрерывном режиме работы гироинклинометра включает начальную выставку гироинклинометра по первому аспекту; осуществление с заданной частотой следующих операций: измерения проекций вектора силы тяжести посредством трехосного акселерометра и проекции ωy вектора угловой скорости посредством одноосного датчика угловой скорости, расчета угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла по измеренным проекциям вектора силы тяжести, расчета азимута скважины на основании указанных угла положения поворотной рамки относительно апсидиальной плоскости, зенитного угла, проекции ωy вектора угловой скорости, причём при осуществлении указанных операций поддерживают угол положения поворотной рамки относительно апсидиальной плоскости равным нулю.
Согласно различным вариантам осуществления настоящего изобретения, поворот поворотной рамки посредством привода рамки в положение, в котором угол положения поворотной рамки относительно апсидиальной плоскости равен нулю, осуществляют на основании управляющего сигнала, получаемого от вычислителя.
Согласно различным вариантам осуществления настоящего изобретения, расчет угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла и расчет азимута скважины осуществляют посредством вычислителя.
СПИСОК ОБОЗНАЧЕНИЙ НА ЧЕРТЕЖЕ
1 - ГИ для проведения инклинометрической съемки;
2 - цилиндрический корпус;
3 - поворотная рамка;
4 - одноосный ДУС;
5 - акселерометр;
6 - привод рамки;
7 - датчик угла поворота.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
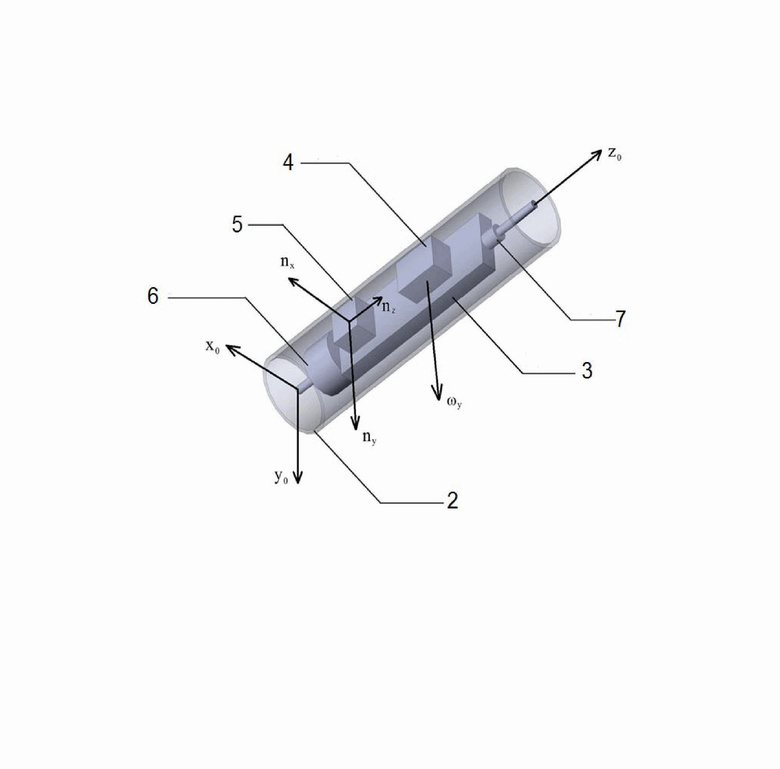
Сущность изобретения более подробно поясняется со ссылкой на прилагаемую фиг., изображающую общий вид гироинклинометра для проведения инклинометрической съемки согласно одному из вариантов осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В соответствии с вариантами осуществления настоящего изобретения, ГИ 1 для проведения инклинометрической съемки обеспечивает возможность осуществления как точечной съемки, так и непрерывной съёмки. Согласно настоящему изобретению, ГИ 1 для проведения инклинометрической съемки, представленный на фиг., содержит цилиндрический корпус 2, в котором расположена поворотная рамка 3, выполненная с возможностью поворота вокруг своей оси вращения на заданный угол относительно цилиндрического корпуса 2, причем ось вращения поворотной рамки 3 совпадает с продольной осью цилиндрического корпуса 2. Цилиндрический корпус 2 также вмещает одноосный ДУС 4, трехосный акселерометр 5, привод 6 рамки, датчик 7 угла поворота (ДУ). При этом заданный угол, как это будет более подробно описано далее, согласно настоящему изобретению, определяется как угол, обеспечивающий работу ГИ 1 в требуемом режиме. Согласно одному из вариантов осуществления настоящего изобретения, ГИ 1 также содержит вычислитель, выполненный с возможностью обмена сигналами с приводом 6 рамки. При этом в некоторых вариантах осуществления вычислитель может быть внешним устройством по отношению к ГИ 1.
Согласно различным вариантам осуществления настоящего изобретения, электрический ток и сигналы между подвижной и неподвижной частями ГИ 1 передаются посредством токоподвода, выполненного в различных вариантах осуществления на основе одного или более из таких физических принципов, как гальваническая связь или бесконтактная связь, например индуктивная, оптическая и т. д. При этом подвижная часть ГИ 1 включает поворотную рамку 3 с установленными на ней одноосным ДУС 4 и трехосным акселерометром 5, а неподвижная - цилиндрический корпус 2, привод 6 рамки и датчик 7 угла поворота.
Согласно одному из вариантов осуществления настоящего изобретения, трехосный акселерометр 5 размещен на поворотной рамке таким образом, что одна из его осей совпадает с осью вращения поворотной рамки 3.
Согласно настоящему изобретению, трехосный акселерометр 5 выполнен с возможностью измерения угла положения поворотной рамки 3 относительно апсидиальной плоскости скважины и зенитного угла.
Согласно одному из вариантов осуществления настоящего изобретения, трехосный акселерометр 5 представляет собой МЭМС-акселерометр.
Согласно настоящему изобретению, одноосный ДУС 4 размещен на поворотной рамке 3 таким образом, что его ось чувствительности расположена перпендикулярно оси вращения поворотной рамки 3 и лежит в плоскости поперечного сечения цилиндрического корпуса 2.
Согласно одному из вариантов настоящего изобретения, одноосный ДУС 4 представляет собой кольцевой вибрационный гироскоп с резонатором индукционного типа, выполненный по МЭМС-технологии, за счет чего указанный тип ДУС обладает высокой виброустойчивостью, удароустойчивостью, термоустойчивостью и стабильностью дрейфа, что дополнительно повышает надежность и точность работы ГИ 1 в различных режимах.
Согласно предпочтительному варианту осуществления, диаметр цилиндрического корпуса 2 лежит в диапазоне от 42 до 44, 5 мм (1,75 дюйма по стандарту SPE).
Согласно различным вариантам осуществления, цилиндрический корпус 2 может быть выполнен из таких материалов, как нержавеющая сталь и титан.
Согласно различным вариантам осуществления, поворотная рамка 3 может быть выполнена из алюминиевых сплавов.
Согласно различным вариантам осуществления, поворотная рамка 3 имеет прямоугольную форму.
Согласно различным вариантам осуществления, привод 6 рамки обеспечивает поворот поворотной рамки 3 на заданный угол. Согласно одному варианту осуществления, привод 6 рамки представляет собой двигатель с редуктором. В других вариантах осуществления привод 6 рамки может представлять собой любые подходящие приводные средства.
Согласно различным вариантам осуществления настоящего изобретения, привод 6 рамки также выполнен с возможностью управления им посредством управляющего сигнала, получаемого с вычислителя.
Согласно одному варианту осуществления изобретения, ДУ 7 выполнен с возможностью измерения угла, соответствующего текущему положению поворотной рамки 3 относительно цилиндрического корпуса 2.
Согласно еще одному варианту осуществления настоящего изобретения, измерение указанного угла позволяет контролировать поворот поворотной рамки 3 на заданный угол, осуществляемый посредством привода 6 рамки. Таким образом обеспечена возможность контроля положения поворотной рамки 3 в требуемом положении относительно цилиндрического корпуса 2.
Согласно различным вариантам осуществления настоящего изобретения, ГИ 1 может работать в точечном режиме работы. В точечном режиме работы ГИ 1 осуществляет измерения параметров, необходимых, в частности, для определения азимута скважины, зенитного угла, угла отклонителя и контроля положения поворотной рамки 3 в дискретные моменты времени на остановках ГИ 1, т.е. при неподвижном ГИ 1 в заданных точках траектории. В точечном режиме работы на основании информации, полученной с выходных сигналов ДУС 4 и трехосного акселерометра 5, зенитный угол и азимут скважины могут вычисляться, например, с помощью нижеприведенных формул.

 ; (2)
; (2)



где θ0 - зенитный угол, вычисляемый по показаниям трехосного акселерометра 5 в начальном положении;
nx, ny, nz - проекции вектора силы тяжести, измеренные акселерометром 5;
А - азимут скважины;
ω1, ω2 - проекции вектора угловой скорости Земли в соответствующих положениях поворотной рамки 3, измеренные посредством ДУС 4;
ψ0 - угол положения поворотной рамки 3 относительно апсидиальной плоскости скважины, именуемый также в рамках настоящего изобретения углом отклонителя, вычисляемый по показаниям трехосного акселерометра 5 в начальном положении;
Ω - угловая скорость суточного вращения Земли;
ϕ - географическая широта места.
Необходимо отметить, что в рамках настоящего изобретения под начальным положением следует понимать положение, в котором находится поворотная рамка 3 в неподвижном состоянии при снятии первых показаний. Согласно одному из вариантов настоящего изобретения, измерение проекций ω1, ω2 вектора угловой скорости вращения Земли на ось одноосного ДУС 4 осуществляется следующим образом. Сначала осуществляют снятие показаний с трехосного акселерометра 5, ДУ 7 и ДУС 4 в первом положении при неподвижной поворотной рамке 3: снимают показания с трехосного акселерометра 5 для получения значений углов ψ0, θ0, соответствующих начальному положению поворотной рамки 3, показания с ДУ 7 для получения значения угла положения поворотной рамки 3 относительно цилиндрического корпуса 2 и показания с ДУС 4 для получения проекции ω1 вектора угловой скорости вращения Земли. Затем осуществляют поворот поворотной рамки 3 относительно цилиндрического корпуса 2 на 90° с помощью привода 6 рамки, контролируя положение поворотной рамки 3 с помощью ДУ 7, и в указанном положении поворотной рамки 3 при неподвижной поворотной рамке 3 снимают показания с ДУС 4 для получения проекции ω2 вектора угловой скорости вращения Земли.
Согласно одному из вариантов настоящего изобретения, для устранения влияния не зависящих от ускорения (т.н. «корпусных») дрейфов ДУС 4 используются дополнительные повороты поворотной рамки 3 в последующие положения, каждое из которых отличается от предыдущего на 90°. Значения углов поворота поворотной рамки 3 относительно цилиндрического корпуса 2 в этих положениях также контролируются с помощью ДУ 7, а показания проекций вектора угловых скоростей вращения Земли снимаются с ДУС 4.
Согласно одному из вариантов настоящего изобретения, контроль поворота поворотной рамки 3, осуществляемый посредством ДУ 7, обеспечивает возможность использования одноосного ДУС 4. В частности, положения поворотной рамки 3, кратные 90°, позволяют осуществлять измерения проекции ωi вектора угловой скорости вращения Земли с помощью одноосного ДУС 4. Это обусловлено тем, что в указанных положениях достигается максимизация наблюдаемости значений sinA, cosA, вычисляемых, согласно формулам (3)-(4). Необходимо отметить, что точность определения азимута с использованием показаний с одноосного ДУС 4, полученных вышеописанным способом, не уступает точности определения азимута с использованием показаний двухосного ДУС. Вместе с тем использование одноосного ДУС 4 в составе ГИ 1 имеет ряд преимуществ относительно использования двухосного ДУС или двух одноосных ДУС, которые заключаются в упрощении конструкции ГИ 1, повышении эксплуатационной надежности ГИ 1.
Согласно одному из вариантов настоящего изобретения, в качестве одноосного ДУС 4 может быть использован кольцевой вибрационный гироскоп с резонатором индукционного типа, выполненный по МЭМС-технологии, что позволяет получить преимущества относительно использования динамически настраиваемого гироскопа в отношении виброустойчивости и удароустойчивости, и, как следствие, позволяет дополнительно повысить эксплуатационную надежность ГИ 1.
Согласно настоящему изобретению, ГИ 1 также может работать в непрерывном режиме измерения проекций nx, ny, nz -вектора силы тяжести для непрерывного расчета азимута и зенитного угла θ, которые вместе с углом ψ отклонителя через коэффициент пропорциональности, равный линейной скорости движения (спуска/подъема) ГИ 1, задают кривизну скважины. В этом режиме измерения параметров, необходимых для определения азимута и зенитного угла θ, осуществляются непосредственно в процессе движения ГИ 1 по стволу скважины. Согласно различным вариантам осуществления настоящего изобретения, движение ГИ 1 по стволу скважины обеспечено средствами доставки геофизических приборов, включающих в себя без ограничений одно из таких средств, как геофизический кабель, кабель-трос и трубная колонна. При этом, согласно настоящему изобретению, под непрерывностью следует понимать осуществление операций снятия, измерения, передачи показаний и расчета на их основании характеристик с установленной частотой на каждом такте работы ГИ 1. Например, согласно одному неограничивающему варианту осуществления настоящего изобретения, установленная частота равна 100 Гц, а соответствующий ей период такта, соответственно, равен 0,01 с. В других вариантах осуществления установленная частота может принимать другие значения, выбор которых зависит от конкретных поставленных задач.
Вращение ГИ 1 вокруг его продольной оси в процессе движения, например, из-за крутильных колебаний геофизического кабеля, вызывает необходимость компенсации этого вращения для удержания оси чувствительности одноосного ДУС 4 в апсидиальной плоскости скважины, что равнозначно стабилизации поворотной рамки 3 в положении, соответствующем ψ = 0°. Это необходимо для обеспечения работы ГИ 1, содержащем только один одноосный ДУС 4, в непрерывном режиме и реализуется за счет стабилизации поворотной рамки 3 в положении, соответствующем нулевому значению угла ψ отклонителя. Стабилизация осуществляется приводом 6 рамки, обеспечивающим поворот поворотной рамки 3 в указанное положение, и трехосным акселерометром 5, обеспечивающим возможность контроля нахождения поворотной рамки 3 в указанном положении по показаниям.
В непрерывном режиме работы на основании измерений одноосного ДУС 4 и трехосного акселерометра 5 азимут скважины вычисляется на основании формул, представленных ниже:



где A - азимут скважины;
 - производная азимута скважины;
- производная азимута скважины;
ωy - проекция вектора угловой скорости, измеренная посредством ДУС 4;
θ - зенитный угол, непрерывно вычисляемый по показаниям трехосного акселерометра 5 во время работы ГИ 1;
ψ - угол положения поворотной рамки 3 ГИ 1 относительно апсидиальной плоскости скважины, именуемый также в рамках настоящего изобретения углом отклонителя;
Ω - угловая скорость суточного вращения Земли;
ϕ - географическая широта места.
Азимут скважины вычисляется на основании нижеприведенной формулы (9) путем интегрирования производной , рассчитываемой согласно формуле (8), с учетом начальных условий, полученных во время начальной выставки, соответствующей, например, внешнему курсоуказанию ГИ или гирокомпансированию в точечном режиме, а именно:
 ,
,
где А0 - начальный азимут скважины;
t - время измерения;
t0 - начальное время;
tтек - текущее время.
Согласно одному из вариантов осуществления настоящего изобретения, начальная выставка осуществляется с помощью ГИ 1, работающего в точечном режиме работы.
Согласно другому варианту осуществления, начальная выставка осуществляется с помощью внешнего курсоуказания ГИ 1.
Необходимо отметить, что совмещение двух вышеуказанных режимов (точечного и непрерывного) работы в одном ГИ 1 позволяет говорить об универсальности ГИ 1 согласно различным вариантам осуществления настоящего изобретения.
ГИ 1 в точечном режиме работает следующим образом. При включении ГИ 1 осуществляется снятие показаний с трехосного акселерометра 5, с одноосного ДУС 4 и с ДУ 7. Полученные показания передаются на вычислитель, который на основании показаний, полученных от трехосного акселерометра 5 и представляющих собой проекции nx, ny, nz вектора силы тяжести, рассчитывает начальные значения зенитного угла θ0 и угла ψ0 отклонителя, а также регистрирует выходной сигнал одноосного ДУС 4 в первом положении, соответствующий проекции ω1 вектора угловой скорости вращения Земли. Далее вычислитель отправляет управляющий сигнал поворотной рамкой 3 на привод 6 рамки для поворота поворотной рамки 3 на угол, равный 90° относительно первоначального положения. При этом поворот поворотной рамки 3 на заданный угол контролируется ДУ 7. Во втором положении осуществляется снятие показаний с одноосного ДУС 4, соответствующих проекции ω2 вектора угловой скорости вращения Земли, и передача этих показаний на вычислитель. Вышеописанным способом осуществляется необходимое количество поворотов приводом 6 рамки поворотной рамки 3 с контролем ее положения посредством ДУ 7 и последующей регистрацией значений соответствующих проекций вектора угловой скорости вращения Земли. На основе полученных значений θ0, ψ0, ω1, ω2, …, ωn вычислитель рассчитывает тригонометрические функции sin A и cos A и вычисляет азимут скважины согласно формулам (3) - (5). При необходимости вычислитель рассчитывает «корпусные» дрейфы (систематическую погрешность) ДУС 4, например по формуле (10), которые затем учитываются в проекциях вектора угловой скорости Земли ω*1, ω*2, …, ω*n в соответствии с формулой (11). Проекции вектора угловой скорости Земли ω*1, ω*2, …, ω*n в таком случае используются в формулах (3)-(5) вместо проекций вектора угловой скорости Земли ω1, ω2, …, ωn.


где τ - корпусной дрейф ДУС 4;
ω1, ω3 - проекции вектора угловой скорости Земли в положениях поворотной рамки 3, отличающихся на 180°, измеренные посредством ДУС 4;
 - проекции вектора угловой скорости Земли
- проекции вектора угловой скорости Земли  , очищенные от «корпусных» дрейфов ДУС.
, очищенные от «корпусных» дрейфов ДУС.
ГИ 1 в непрерывном режиме работает следующим образом. После получения начальных параметров, измеренных в точечном режиме, осуществляется непрерывное измерение проекций nx, ny, nz вектора силы тяжести посредством трехосного акселерометра 5 и проекции ωy вектора угловой скорости посредством одноосного ДУС 4 и передача указанных измерений на вычислитель. На основании полученных измерений вычислитель производит непрерывный расчет угла ψ положения поворотной рамки 3 относительно апсидиальной плоскости, зенитного угла θ и азимута скважины по формулам (6) - (9) и формирует закон управления приводом 6 рамки для обеспечения стабилизации поворотной рамки 3 таким образом, чтобы ось чувствительности ДУС 4 находилась в апсидиальной плоскости скважины, что равнозначно стабилизации поворотной рамки 3 в положении, соответствующем ψ = 0°. Следует учитывать, что из-за погрешностей осуществления поворота приводом 6 рамки угол ψ может принимать значение, отличное от нуля, в пределах нескольких градусов, при этом точность вычисления азимута будет сохраняться, т.к. выполняется соотношение cos ψ ≈ 1. Положение поворотной рамки 3, соответствующее ψ = 0°, в рамках настоящей заявки означает такое положение рамки, при котором ψ является достаточно малым для поддержания работоспособности устройства, то есть для обеспечения соотношение cos ψ≈1. После формирования закона управления приводом 6 рамки и его передачи на привод 6 рамки ГИ 1 привод 6 рамки осуществляет поворот поворотной рамки 3 в положение, соответствующее ψ = 0°, которое поддерживается посредством привода 6 и контролируется по показаниям акселерометра 5 в процессе непрерывных измерений, осуществляемых посредством трехосного акселерометра 5 и одноосного ДУС 4, а также непрерывного расчета угла положения поворотной рамки 3, зенитного угла θ и азимута скважины, осуществляемого посредством вычислителя.
Далее описан способ проведения инклинометрической съемки при точечном режиме работы ГИ 1. Указанный способ включает: остановку в начальном положении в скважине ГИ 1; измерение проекций nx, ny, nz вектора силы тяжести посредством трехосного акселерометра 5; расчет угла ψ0 положения поворотной рамки 3 относительно апсидиальной плоскости скважины и зенитного угла θ0 на основании указанных измеренных посредством акселерометра 5 проекций nx, ny, nz вектора силы тяжести; измерение угла положения поворотной рамки 3 относительно цилиндрического корпуса 2 посредством ДУ 7; измерение проекции ω1 вектора угловой скорости вращения Земли посредством одноосного ДУС 4; формирование и передача вычислителем управляющего сигнала поворотной рамкой 3 на привод 6 рамки; поворот поворотной рамки 3 посредством привода 6 рамки на угол 90° относительно цилиндрического корпуса 2 с контролем положения поворотной рамки 3 относительно цилиндрического корпуса 2 посредством ДУ 7; измерение проекции ω2 вектора угловой скорости вращения Земли посредством ДУС 4. На заключительном этапе способ включает расчет тригонометрических функций sin A и cos A и вычисление азимута скважины согласно формулам (3) - (5).
Согласно одному варианту осуществления настоящего изобретения, вышеописанный способ включает повороты поворотной рамки 3 в последующие положения посредством привода 6 рамки на углы, кратные 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла с измерением проекции ω вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости в каждом получаемом положении поворотной рамки относительно цилиндрического корпуса и последующий расчет азимута скважины согласно формулам (3) - (5) на основании измеренных проекции ω вектора угловой скорости вращения Земли в каждом положении поворотной рамки относительно цилиндрического корпуса. При этом указанные повороты поворотной рамки 3 на углы, кратные 90°, осуществляют после измерения проекции ω2 вектора угловой скорости вращения Земли на основании управляющего сигнала, получаемого вычислителем. Указанные повороты поворотной рамки 3 на углы, кратные 90°, осуществляемые после измерения проекции ω2 вектора угловой скорости вращения Земли, позволяют при необходимости учитывать систематическую погрешность τ ДУС 4 при расчете азимута скважины. Согласно одному варианту осуществления настоящего изобретения, способ проведения инклинометрической съемки при точечном режиме также включает расчет систематической погрешности τ ДУС 4 по формулам (10)-(11) и учет указанной погрешности τ при расчете азимута скважины по формулам (3)-(5).
Согласно различным вариантам осуществления вышеописанного способа, расчет азимута скважины осуществляют посредством вычислителя.
Способ проведения инклинометрической съемки при непрерывном режиме работы ГИ 1 включает: ввод начальных условий путем проведения начальной выставки с помощью точечного режима работы ГИ 1; осуществление с заданной частотой операций измерения nx, ny, nz проекций вектора силы тяжести посредством трехосного акселерометра 5 и проекции ωy вектора угловой скорости посредством одноосного ДУС 4 с передачей снятых показаний на вычислитель, расчета угла положения поворотной рамки 3 относительно апсидиальной плоскости скважины и зенитного угла θ по измеренным проекциям вектора силы тяжести, расчета азимута скважины на основании указанных угла положения поворотной рамки 3 относительно апсидиальной плоскости, зенитного угла θ, проекции ωy вектора угловой скорости по формулам (6)-(9) указанным вычислителем, причём при осуществлении указанных операций поддерживают угол положения поворотной рамки 3 относительно апсидиальной плоскости равным нулю. Для этого при определённом вычислителем отклонении угла положения поворотной рамки 3 от нулевого значения вычислитель формирует и передаёт на привод 6 поворотной рамки 3 управляющий сигнал с обеспечением поворота этой рамки в положение, соответствующее ψ = 0°.
Настоящее изобретение не ограничено конкретными вариантами осуществления, раскрытыми в описании в иллюстративных целях, и охватывает все возможные модификации и альтернативы, входящие в объем настоящего изобретения, определенный формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
Группа изобретений относится к области точного приборостроения, в частности к гироинклинометру для проведения инклинометрической съемки ранее пробуренных обсаженных скважин. Гироинклинометр для проведения инклинометрической съемки содержит цилиндрический корпус, содержащий поворотную рамку, выполненную с возможностью вращения вокруг своей оси вращения относительно цилиндрического корпуса. Ось вращения поворотной рамки совпадает с продольной осью цилиндрического корпуса. Датчик угла выполнен с возможностью измерения угла положения поворотной рамки относительно цилиндрического корпуса. Привод рамки выполнен с возможностью вращения поворотной рамки и с возможностью управления им посредством управляющего сигнала, получаемого с вычислителя. Трехосный акселерометр размещен на поворотной рамке таким образом, что одна из его осей совпадает с осью вращения поворотной рамки, и выполнен с возможностью измерения угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла. Одноосный датчик угловой скорости размещён на поворотной рамке и его ось чувствительности расположена перпендикулярно оси вращения поворотной рамки и лежит в плоскости поперечного сечения цилиндрического корпуса. Заявлен способ проведения инклинометрической съемки при точечном режиме работы гироинклинометра и способ проведения инклинометрической съемки при непрерывном режиме работы гироинклинометра. Достигается технический результат – повышение эксплуатационной надежности гироинклинометра и упрощение конструкции. 3 н. и 7 з.п. ф-лы, 1 ил.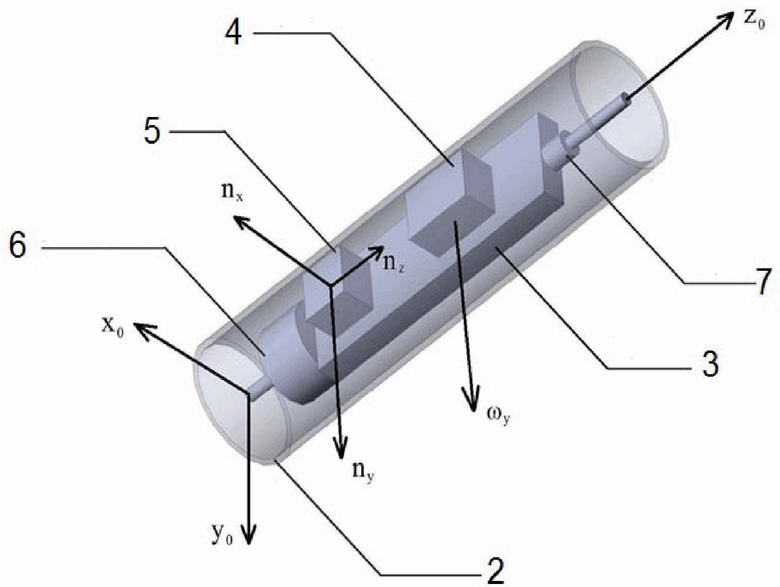
1. Гироинклинометр для проведения инклинометрической съемки, содержащий:
цилиндрический корпус, содержащий
поворотную рамку, выполненную с возможностью вращения вокруг своей оси вращения относительно цилиндрического корпуса, причем ось вращения поворотной рамки совпадает с продольной осью цилиндрического корпуса,
датчик угла, выполненный с возможностью измерения угла положения поворотной рамки относительно цилиндрического корпуса,
привод рамки, выполненный с возможностью вращения поворотной рамки и с возможностью управления им посредством управляющего сигнала, получаемого с вычислителя,
трехосный акселерометр, размещенный на поворотной рамке таким образом, что одна из его осей совпадает с осью вращения поворотной рамки, и выполненный с возможностью измерения угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла,
одноосный датчик угловой скорости, который размещён на поворотной рамке и ось чувствительности которого расположена перпендикулярно оси вращения поворотной рамки и лежит в плоскости поперечного сечения цилиндрического корпуса.
2. Гироинклинометр по п. 1, также содержащий указанный вычислитель.
3. Способ проведения инклинометрической съемки при точечном режиме работы гироинклинометра по п. 1 или 2, включающий:
остановку указанного гироинклинометра в начальном положении в скважине,
измерение проекций вектора силы тяжести посредством трехосного акселерометра,
расчет в начальном положении угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла по измеренным проекциям вектора силы тяжести,
измерение угла положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла,
измерение проекции ω1 вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости,
поворот поворотной рамки посредством привода рамки на угол 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла,
измерение проекции ω2 вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости,
расчет азимута скважины на основании указанных угла положения поворотной рамки относительно апсидиальной плоскости скважины в начальном положении, зенитного угла в начальном положении, проекции ω1 вектора угловой скорости вращения Земли и проекции ω2 вектора угловой скорости вращения Земли.
4. Способ по п. 3, включающий после операции измерения проекции ω2 вектора угловой скорости вращения Земли поворот поворотной рамки посредством привода рамки на углы, кратные 90°, относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла с измерением проекции ω вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости в каждом получаемом положении поворотной рамки относительно цилиндрического корпуса, причём указанный расчёт азимута скважины производят также на основании измеренных проекций ω вектора угловой скорости вращения Земли в указанном каждом получаемом положении поворотной рамки относительно цилиндрического корпуса.
5. Способ по п. 3, включающий после операции измерения проекции ω2 вектора угловой скорости вращения Земли поворот поворотной рамки посредством привода рамки на угол 90° относительно цилиндрического корпуса с контролем положения поворотной рамки относительно цилиндрического корпуса посредством датчика угла с измерением проекции ω вектора угловой скорости вращения Земли посредством одноосного датчика угловой скорости в получаемом положении поворотной рамки относительно цилиндрического корпуса, расчет систематической погрешности τ датчика угловой скорости на основании проекций вектора угловой скорости Земли в положениях поворотной рамки, отличающихся на 180°, и учет указанной погрешности τ при расчете азимута скважины.
6. Способ по п. 3, 4 или 5, согласно которому поворот поворотной рамки посредством привода рамки относительно цилиндрического корпуса осуществляют на основании управляющего сигнала, получаемого от вычислителя.
7. Способ по любому из пп. 3-6, в котором указанные расчет в начальном положении угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла и расчет азимута скважины осуществляют посредством вычислителя.
8. Способ проведения инклинометрической съемки при непрерывном режиме работы гироинклинометра по п. 1 или 2, включающий:
начальную выставку указанного гироинклинометра,
осуществление с заданной частотой следующих операций:
измерения проекций вектора силы тяжести посредством трехосного акселерометра и проекции ωy вектора угловой скорости посредством одноосного датчика угловой скорости,
расчета угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла по измеренным проекциям вектора силы тяжести,
расчета азимута скважины на основании указанных угла положения поворотной рамки относительно апсидиальной плоскости, зенитного угла, проекции ωy вектора угловой скорости,
причём при осуществлении указанных операций поддерживают угол положения поворотной рамки относительно апсидиальной плоскости равным нулю.
9. Способ по п. 8, согласно которому поворот поворотной рамки посредством привода рамки в положение, в котором угол положения поворотной рамки относительно апсидиальной плоскости равен нулю, осуществляют на основании управляющего сигнала, получаемого от вычислителя.
10. Способ по любому из пп. 8, 9, в котором указанные расчет угла положения поворотной рамки относительно апсидиальной плоскости скважины и зенитного угла и расчет азимута скважины осуществляют посредством вычислителя.
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Система комплексного механизированного управления теплом, влагой и пищей в почве для сельскохозяйственных растений | 1959 |
|
SU124731A1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ПЕРЕВОРАЧИВАЮЩИЙСЯ ИНКЛИНОМЕТР С ГИРОДАТЧИКАМИ | 2015 |
|
RU2703042C2 |
| US 20050126022 A1, 16.06.2005. | |||

