Изобретение относится к области управления движением космических аппаратов.
Известен способ управления кинетическим моментом космического аппарата (КА) при помощи избыточных гиросиловых систем [1]. Указанные системы состоят из р гироскопов с постоянными по модулю векторами  их собственных кинетических моментов. Углы εj(j=1, 2 ... m) поворота гироузлов (гиромоторов) вокруг осей их подвеса, отсчитываемые от некоторых начальных значений, определяют положение векторов
их собственных кинетических моментов. Углы εj(j=1, 2 ... m) поворота гироузлов (гиромоторов) вокруг осей их подвеса, отсчитываемые от некоторых начальных значений, определяют положение векторов  , а следовательно, и вектора
, а следовательно, и вектора

относительно связанного с аппаратом триэдра OXYZ. Электрические приводы (моментные датчики) на осях гироузлов создают угловые скорости ε.
Управляющий момент гиросиловой системы  равен
равен

где  - локальная производная
- локальная производная  в осях OXYZ.
в осях OXYZ.
Управление кинетическим моментом КА производится за счет формирования в гироскопической системе требуемого управляющего момента и за счет перераспределения кинетического момента или перестройки внутри гироскопической системы (см. [1], стр.154). При этом оси подвеса гироузлов не подвергаются переустановке в осях OXYZ.
Управление кинетическим моментом КА производится в пределах области располагаемых значений S с учетом предстоящего динамического режима ориентации (с учетом прогноза значений вектора  ). При установившемся режиме ориентации управление системой производится по закону самонастройки (адаптации).
). При установившемся режиме ориентации управление системой производится по закону самонастройки (адаптации).
В случае ориентации КА относительно вращающейся системы координат, при выполнении им программного разворота и т.п. управление системой производится по закону компенсации гироскопического момента.
Из-за высокой размеренности m вектора  (m может иметь порядок до 6-8 и выше) идет постоянное перераспределение кинетического момента между отдельными гироскопами с целью поиска локальных максимумов для преодоления "непроходимых поверхностей" и обеспечения управления кинетическим моментом КА.
(m может иметь порядок до 6-8 и выше) идет постоянное перераспределение кинетического момента между отдельными гироскопами с целью поиска локальных максимумов для преодоления "непроходимых поверхностей" и обеспечения управления кинетическим моментом КА.
Резервирование в гироскопической системе достигается большой избыточностью системы. Разность m-3 (собственно избыточность) может быть порядка 3-5 и более единиц. При этом все гироскопы одновременно задействованы в работу.
В качестве преимущества указанной системы необходимо отметить универсальность ее для решения любых задач по управлению угловым движением КА с высокой степенью "горячего" резервирования на случай отказа любого из гироскопов, входящих в систему.
В качестве недостатка необходимо отметить одновременную работу всех гироскопов и тем самым выработки установленного для них ресурса. При длительных сроках эксплуатации КА (например, геостационарных спутников) и невозможности проводить ремонт и замену в случае отказа приборов. Недостаток может привести к невыполнению аппаратом штатной программы полета.
Указанный недостаток устраняется в другом известном способе-прототипе управления кинетическим моментом КА с помощью реактивных исполнительных органов [2], где предусмотрено "холодное" резервирование силовых гироскопов (СГ). При этом указанные приборы разделены на "основные" и "резервные". В случае отказа "основных" в динамическом контуре управления КА задействуются "резервные". Поскольку на борту КА, как правило, кроме реактивных инерционных исполнительных органов задействуются реактивные двигатели ориентации (РД), переход с "основных" на "резервные" комплекты не приводит к прерыванию динамического режима с потерей ориентации или стабилизации КА. На интервале времени выхода на рабочий режим "резервного" прибора управление аппаратом производится при помощи РД.
В прототипе рассмотрена система СГ, состоящая из трех "основных" и одного "резервного" одностепенных силовых гироскопов (маховиков).
Матрица направляющих косинусов их собственных кинетических моментов с векторами  , равными по абсолютному значению |
, равными по абсолютному значению | |, имеет вид:
|, имеет вид:
При этом 4-й маховик является резервным в системе. В случае выхода из строя одного из основных маховиков в динамический контур управления КА подключается резервный маховик.
Исходная область располагаемых значений вектора кинетического момента основных СГ системы S0 в виде "проволочной" модели представлена на фиг.1. Она представляет собой куб с размерами граней  и радиусом вписанной сферы
и радиусом вписанной сферы  . "Основные" маховики задействованы постоянно для управления кинетическим моментом КА, а "резервный" находится в выключенном состоянии (в "холодном" резерве) и может подключаться к работе по мере необходимости.
. "Основные" маховики задействованы постоянно для управления кинетическим моментом КА, а "резервный" находится в выключенном состоянии (в "холодном" резерве) и может подключаться к работе по мере необходимости.
Так в прототипе "резервный" маховик подключается в динамический контур КА при проведении маневра с использованием РД для обеспечения стабилизации углового движения КА при выходе вектора суммарного кинетического момента на границы области S0.
При подключении "резервного" 4-го маховика Г4 область Sr примет вид неправильного многогранника, для которого  (см. фиг.2). Как видно из фиг.2, параметры области располагаемых значений вектора кинетического момента Sr значительно увеличились, что позволило в прототипе продлить маневр без разгрузки системы СГ от накопленного кинетического момента.
(см. фиг.2). Как видно из фиг.2, параметры области располагаемых значений вектора кинетического момента Sr значительно увеличились, что позволило в прототипе продлить маневр без разгрузки системы СГ от накопленного кинетического момента.
Таким образом, способ-прототип включает в себя измерение кинетического момента в системе СГ КА в момент времени t0 начала проведения i-го динамического режима КА (например, маневра). Причем динамические режимы могут последовательно повторяться, т.е. i=1, 2, 3 .... Далее измеряют вектор угловой скорости КА на указанный момент времени и по указанным измеренным значениям векторов, а также известным значениям моментов инерции КА определяют значение суммарного вектора кинетического момента  . Осуществляют прогноз текущих значений суммарного вектора кинетического момента
. Осуществляют прогноз текущих значений суммарного вектора кинетического момента  на выполнении i-го динамического режима КА. Проверяют выполнение условия
на выполнении i-го динамического режима КА. Проверяют выполнение условия

В случае выполнения указанного условия выбирают для управления кинетическим моментом КА основные СГ системы, обеспечивающие проведение i-го динамического режима с выполнением условия (1). А в случае невыполнения условия (1) производят проверку выполнения условия

В случае выполнения условия (2) выбирают для управления кинетическим моментом КА основные и резервные СГ системы, обеспечивающие выполнение указанного условия. Разгрузку СГ от накопленного кинетического момента при помощи РДО осуществляют в случае невыполнения условия (2).
Основной недостаток способа-прототипа заключается в нижеследующем.
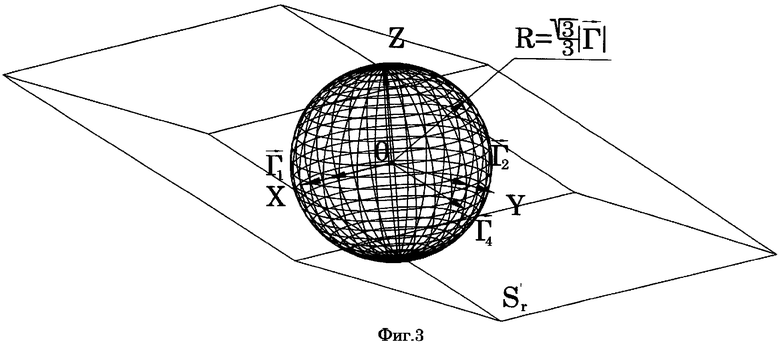
В случае отказа одного из основных СГ и введение в контур управления резервного маховика параметры области Sr значительно уменьшаются. Так, например, при отказе 3-го маховика область S′r будет иметь вид неправильного многогранника с вписанной сферой радиусом  , см. фиг.3. Аналогичные изменения области произойдут и в случаях отказа 1-го или 2-го маховиков.
, см. фиг.3. Аналогичные изменения области произойдут и в случаях отказа 1-го или 2-го маховиков.
С другой стороны, если бы можно было изменить конфигурацию системы СГ и выставить 4-й маховик в положение, которое занимал 3-й маховик, удалось бы восстановить вновь параметры области S0 (см. фиг.1). При этом параметры области S0 по радиусу вписанной сферы почти в два раза превышают параметры S′r.
Задачей, решаемой предлагаемым изобретением, является изменение конфигурации системы СГ для изменения параметров области...S с учетом конструкции КА и выполняемого им динамического режима, позволяющего повысить управляемость кинетическим моментом КА при помощи СГ без использования РД. Технический результат достигается тем, что в способе управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов, включающем измерение кинетического момента в системе силовых гироскопов в момент времени t0 начала проведения i-го динамического режима космического аппарата, где i=1, 2, 3 ..., измерение вектора угловой скорости космического аппарата на указанный момент времени, определение по известным значениям моментов инерции космического аппарата, а также измеренным значениям вектора угловой скорости КА и кинетического момента силовых гироскопов суммарного вектора кинетического момента  , прогноз текущих значений суммарного вектора кинетического момента
, прогноз текущих значений суммарного вектора кинетического момента  на выполнение i-го динамического режима космического аппарата, проверку выполнения условия
на выполнение i-го динамического режима космического аппарата, проверку выполнения условия
 ,
,
где S0 - исходная область располагаемых значений вектора кинетического момента основных силовых гироскопов системы, и в случае его выполнения выбор для управления кинетическим моментом космического аппарата основных силовых гироскопов системы, обеспечивающих проведение i-го динамического режима с выполнением условия (1), а в случае невыполнения условия (1), проведение проверки выполнения условия
 ,
,
где Sr - область располагаемых значений вектора кинетического момента основных и резервных силовых гироскопов системы и в случае его выполнения выбор для управления кинетическим моментом космического аппарата основных и резервных силовых гироскопов системы, обеспечивающих выполнение условия (2) и разгрузку силовых гироскопов от накопленного кинетического момента с помощью реактивных двигателей в случае невыполнения указанного условия (2), что до начала выполнения динамических режимов фиксируют на космическом аппарате n конфигураций расположения основных, а также совокупности основных и резервных силовых гироскопов относительно осей связанного базиса, где n=0, 1, 2, 3, ..., для каждой из которых определяют области располагаемых значений вектора кинетического момента Sn, а в случае невыполнения условия (2) в момент времени t0 прогноз выполнения i-го динамического режима по кинетическому моменту производят по выполнению условия

и в случае его выполнения для выбранной области  сравнивают расположение силовых гироскопов с их расположением для областей S0 и Sr, по результатам сравнения определяют состав силовых гироскопов, несовпадающий по конфигурации установки для выбранной области S1n, перед проведением i-го динамического режима производят управление кинетическим моментом космического аппарата при помощи реактивных исполнительных органов до обнуления кинетического момента каждого из инерционных элементов несовпадающих по конфигурации силовых гироскопов, далее производят изменение конфигурации расположения обнуленных силовых гироскопов относительно осей связанного базиса космического аппарата путем перестановки силовых гироскопов в положения, соответствующие потребной для выполнения i-го динамического режима области S1n, в случае выполнения условия (3) для определенных вариантов областей Sn осуществляют выбор области
сравнивают расположение силовых гироскопов с их расположением для областей S0 и Sr, по результатам сравнения определяют состав силовых гироскопов, несовпадающий по конфигурации установки для выбранной области S1n, перед проведением i-го динамического режима производят управление кинетическим моментом космического аппарата при помощи реактивных исполнительных органов до обнуления кинетического момента каждого из инерционных элементов несовпадающих по конфигурации силовых гироскопов, далее производят изменение конфигурации расположения обнуленных силовых гироскопов относительно осей связанного базиса космического аппарата путем перестановки силовых гироскопов в положения, соответствующие потребной для выполнения i-го динамического режима области S1n, в случае выполнения условия (3) для определенных вариантов областей Sn осуществляют выбор области  , конфигурация расположения силовых гироскопов которой позволяет обеспечить максимальную продолжительность выполнения (i+1)-x динамических режимов без разгрузки силовых гироскопов при помощи реактивных двигателей, а в случае, если условие (3) не выполняется ни для одного из вариантов Sn, производят прогноз изменения суммарного вектора кинетического момента
, конфигурация расположения силовых гироскопов которой позволяет обеспечить максимальную продолжительность выполнения (i+1)-x динамических режимов без разгрузки силовых гироскопов при помощи реактивных двигателей, а в случае, если условие (3) не выполняется ни для одного из вариантов Sn, производят прогноз изменения суммарного вектора кинетического момента  с учетом каждой из n конфигураций расположения силовых гироскопов области Sn и с использованием реактивных двигателей для разгрузки от накопленного кинетического момента, при этом выбор области
с учетом каждой из n конфигураций расположения силовых гироскопов области Sn и с использованием реактивных двигателей для разгрузки от накопленного кинетического момента, при этом выбор области  и по ней конфигурации расположения силовых гироскопов производят с учетом режима разгрузки, соответствующего минимальному расходу рабочего тела, затраченного на разгрузку, далее производят изменение конфигурации расположения силовых гироскопов в системе вышеуказанным образом для одной из выбранных областей S2n или S3n, аналогично изменению конфигурации силовых гироскопов, проведенной для области Sn1, и по ее завершении производят управление кинетическим моментом космического аппарата с использованием выбранной из областей S2n или S3n конфигурации расположения силовых гироскопов, а по завершении указанного i-го динамического режима производят повторную проверку условия (1) для последующего (i+1)-го динамического режима, приняв за исходную S0 выбранную текущую конфигурацию расположения силовых гироскопов из областей S1n, S2n, S3n, далее в случае выполнения условия (1) производят выполнение (i+1)-го динамического режима с использованием основных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае производят проверку выполнения условия (2) для выбранной конфигурации расположения силовых гироскопов, и если оно выполняется, производят выполнение (i+1)-го динамического режима с использованием основных и резервных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае повторяют цикл поиска из n конфигураций расположения силовых гироскопов по условию (3) вышеуказанным образом, с последующим изменением конфигурации расположения силовых гироскопов и выполнением динамических режимов за счет управления кинетическим моментом космического аппарата на интервале (i+1)-го динамического режима с использованием вновь выполненной измененной конфигурации расположения силовых гироскопов.
и по ней конфигурации расположения силовых гироскопов производят с учетом режима разгрузки, соответствующего минимальному расходу рабочего тела, затраченного на разгрузку, далее производят изменение конфигурации расположения силовых гироскопов в системе вышеуказанным образом для одной из выбранных областей S2n или S3n, аналогично изменению конфигурации силовых гироскопов, проведенной для области Sn1, и по ее завершении производят управление кинетическим моментом космического аппарата с использованием выбранной из областей S2n или S3n конфигурации расположения силовых гироскопов, а по завершении указанного i-го динамического режима производят повторную проверку условия (1) для последующего (i+1)-го динамического режима, приняв за исходную S0 выбранную текущую конфигурацию расположения силовых гироскопов из областей S1n, S2n, S3n, далее в случае выполнения условия (1) производят выполнение (i+1)-го динамического режима с использованием основных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае производят проверку выполнения условия (2) для выбранной конфигурации расположения силовых гироскопов, и если оно выполняется, производят выполнение (i+1)-го динамического режима с использованием основных и резервных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае повторяют цикл поиска из n конфигураций расположения силовых гироскопов по условию (3) вышеуказанным образом, с последующим изменением конфигурации расположения силовых гироскопов и выполнением динамических режимов за счет управления кинетическим моментом космического аппарата на интервале (i+1)-го динамического режима с использованием вновь выполненной измененной конфигурации расположения силовых гироскопов.
На фиг.1 представлена область S0 располагаемых значений вектора кинематического момента системы СГ из 3-х маховиков, оси вращения которых расположены по осям связанного базиса КА.
На фиг.2 представлена область Sr располагаемых значений вектора кинематического момента системы СГ из 4-х маховиков, из которых три оси вращения направлены по осям связанного базиса КА, а четвертая - под углом к осям связанного базиса.
На фиг.3 представлена область S'r располагаемых значений вектора кинематического момента системы СГ из 3-х маховиков, из которых две оси вращения которых направлены по осям связанного базиса КА, а третья - под углом к осям связанного базиса.
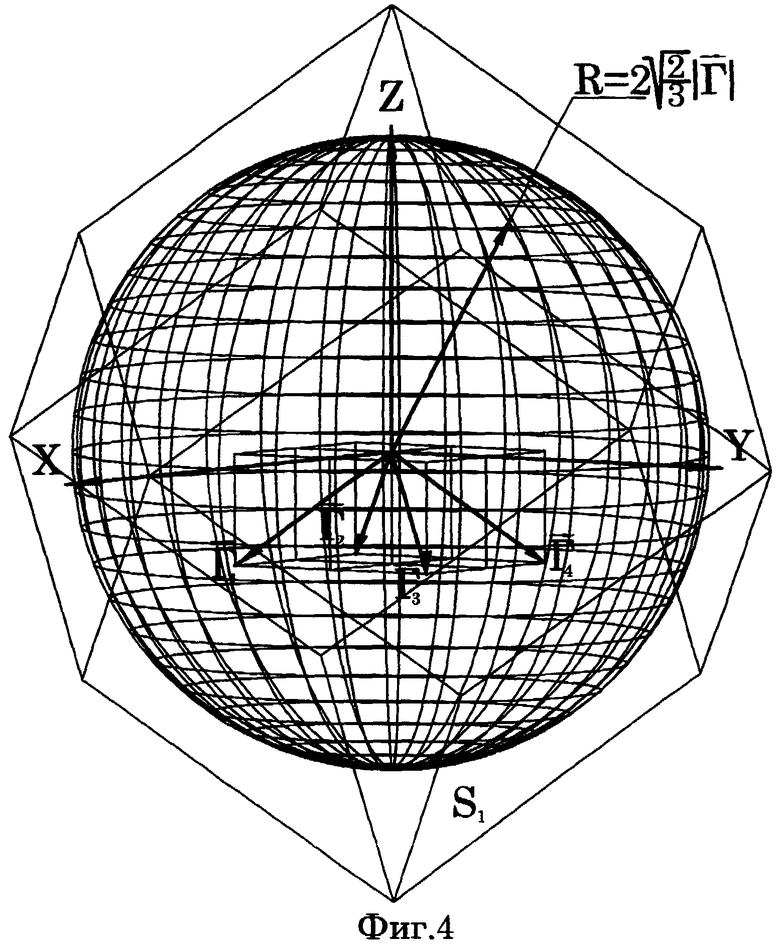
На фиг.4 представлена область S1 располагаемых значений вектора кинематического момента системы СГ из 4-х маховиков, оси вращения которых расположены по четырем сторонам четырехгранной пирамиды.
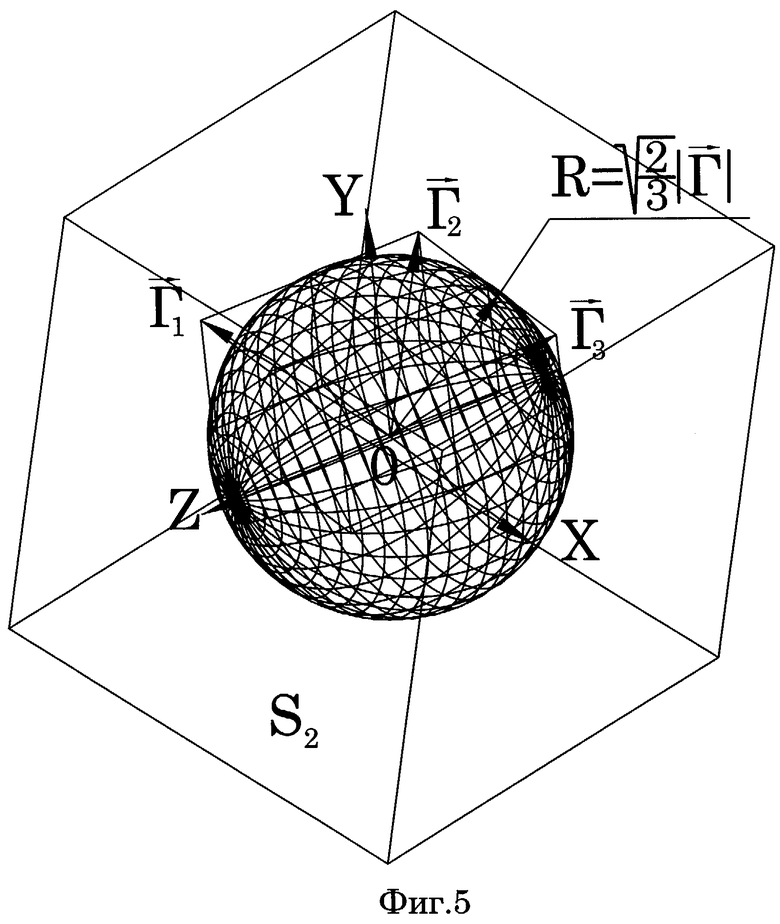
На фиг.5 представлена область S2 располагаемых значений вектора кинематического момента системы СГ из 3-х маховиков, оси вращения которых расположены под углами к осям связанного базиса.
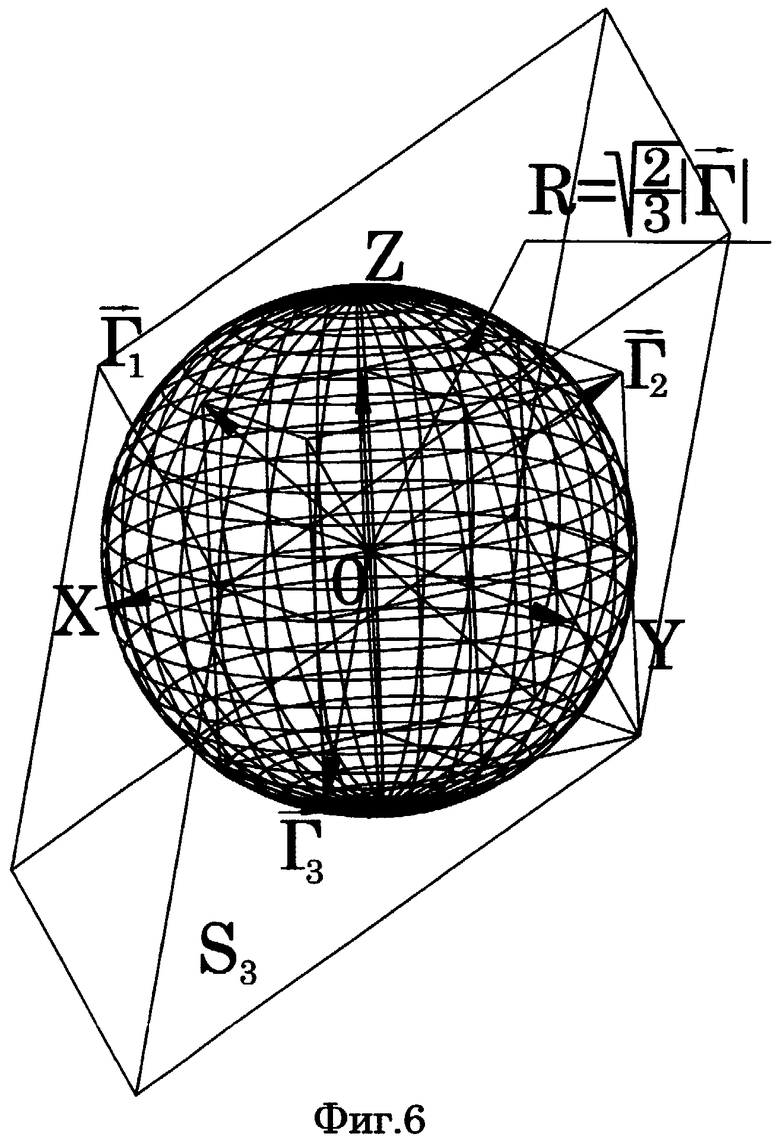
На фиг.6 представлена область S3 располагаемых значений вектора кинематического момента системы СГ из 3-х маховиков, оси вращения которых расположены под углами к осям связанного базиса. При этом расположение осей (углов) отличается от случая расположения маховиков, рассмотренного для области S2.
На фиг.4 представлена "проволочная" модель области S1 располагаемых значений вектора кинетического момента системы СГ из четырех гироскопов с  , в которой оси вращения гироскопов расположены по сторонам четырехгранной пирамиды (см. [3]). Матрица направляющих косинусов в осях связанного базиса OXYZ для указанной схемы расположения имеет вид:
, в которой оси вращения гироскопов расположены по сторонам четырехгранной пирамиды (см. [3]). Матрица направляющих косинусов в осях связанного базиса OXYZ для указанной схемы расположения имеет вид:
При этом радиус вписанной сферы  .
.
Для S2 и S3 (см. фиг.5 и 6), для  с матрицами направляющих косинусов A3 и А4 соответственно
с матрицами направляющих косинусов A3 и А4 соответственно
радиус вписанной сферы равен  .
.
На фиг.1÷фиг.6 рассмотрены варианты области S для случая 4-х одностепенных СГ ("основных" и "резервных") с конфигурациями их расположения, наиболее часто встречающихся на КА. При этом под "основными" будем понимать СГ, задействованные для управления кинетическим моментом КА. Оставшиеся СГ, не подключенные к динамическому контуру управления КА (исправные, но не работающие, находящиеся в режиме рекуперации и т.д.), будем считать "резервными". Резерв рассматривается с точки зрения подключения неработающего СГ, в случае необходимости, к управлению кинетическим моментом КА.
Например, см. [3], в режиме аварийного управления КА два гироприбора являются "основными" и два (задействованные в режиме рекуперации) "резервными". При этом, работая по принципу «гирорамы», приборы, находящиеся в режиме рекуперации, взаимно компенсируют свой кинетический момент.
Очевидно также, что шестью примерами количество возможных вариантов конфигурации системы СГ не ограничивается.
Из рассмотренных вариантов предпочтительным с точки зрения задействования трех основных СГ является вариант, обеспечивающий S0 (см. фиг.1), в случае подключения резервного СГ вариант S1 (см. фиг.4). Однако указанное сравнение проведено по радиусам вписанной сферы и правомочно при равномерном накапливании кинетического момента по трем осям одновременно в процессе управления кинетическим моментом КА. Оно также правомочно для динамических режимов, связанных с разворотами КА относительно всех 3-х осей OXYZ, при этом значения моментов инерции аппарата должны незначительно отличаться друг от друга (КА - «сфероид»).
В случае управления кинетическим моментом КА в процессе коррекции орбиты (при угловой стабилизации КА), рассмотренном в [2], предпочтение может отдаваться "вытянутым" вдоль отдельных осей базиса OXYZ областям. При этом выбор направления "вытянутости" определяется величиной и направлением действия управляющих моментов от РД, которые система СГ должна парировать (см. [4]). В таких случаях продолжительность маневра будет определяться параметрами области S (см. [5]) по конкретному направлению вдоль оси связанного базиса.
Таким образом, построение конфигурации системы СГ зависит от конструктивных особенностей аппарата и динамических режимов, выполняемых им.
В качестве примера рассмотрим управление кинетическим моментом геостационарного спутника связи (ГСС) КА "Ямал", на котором установлена система СГ "Колокол". Указанная система состоит из 4-х маховиков, три из которых являются основными и постоянно задействуются в динамическом контуре управления КА. Четвертый маховик находится в функциональном резерве.
При постоянном поддержании орбитальной ориентации ГСС наиболее целесообразно иметь конфигурации СГ с областью S0, для которой матрица направляющих косинусов имеет вид:
Управление кинетическим моментом КА производится равномерно, с учетом переменной и постоянной его составляющей внутри сферы  , см. фиг.3, 4 в [2].
, см. фиг.3, 4 в [2].
В случае проведения маневра при помощи РД с расположенными векторами тяг под углом к осям связанного базиса целесообразно произвести переконфигурацию области. Так, если определить, например, вектор управляющего момента от РД  , то целесообразно иметь на маневре больший запас по кинетическому по оси OZ. Тогда максимальная продолжительность Δτ1 маневра для области S0 будет равна
, то целесообразно иметь на маневре больший запас по кинетическому по оси OZ. Тогда максимальная продолжительность Δτ1 маневра для области S0 будет равна
 ,
,
при этом не учитываем действия на КА внешних возмущающих моментов.
Для областей S2 и S3 (см. фиг.5, 6), для которых положения СГ определены по матрицам А3, А4, продолжительность маневра Δτ2 будет равна
Через соотношение Δτ2/Δτ1 видно, что продолжительность маневра во втором случае в  раз (˜1,7) больше, чем в первом.
раз (˜1,7) больше, чем в первом.
Для области Sr
 , а
, а
соотношение

Для области S1
 , а
, а
соотношение

Для области S′r
 , а
, а
соотношение

Таким образом видно, что без задействования резервного маховика наиболее целесообразно маневр проводить по конфигурации системы СГ с областями S2 и S3. А в случае его задействования - по конфигурации системы СГ с областью S1.
Следовательно, в подобных случаях выбирать конфигурацию системы СГ необходимо из заданной продолжительности маневра.
Например, для поддержания ГСС в точке стояния, когда применяются всего три динамических режима: поддержание ориентации в орбитальной системе координат (ОСК); маневр по "нормали"; маневр по "трансверсали" (см. [5]), целесообразно с сохранением "резерва" проводить управление с использованием области S0. Это связано с тем, что в общем плане полета большая часть полетного времени используется для поддержания спутником ОСК. Маневры являются относительно кратковременными.
При движении ГСС в орбитальную позицию продолжительность маневров может превалировать над интервалами полетного времени по поддержанию ориентации спутника. Тем самым обеспечивается необходимая величина характеристической скорости для продвижения спутника по геостационарной орбите.
В таких случаях с сохранением резерва по маховикам целесообразно использовать одну из конфигураций, представленных на фиг.5, 6 (S2 или S3). В случае же использования резервного маховика предпочтение необходимо отдавать конфигурации на фиг.4 с областью располагаемых значений вектора кинетического момента S1.
Очевидно, что при существующем разнообразии динамических режимов на КА, а также возможно большом разнообразии построение конфигураций систем СГ с одно-, двух- трехстепенными силовыми гироприборами (см. [1]) необходимо обобщить указанный пример.
Таким образом, до начала выполнения динамических режимов на КА зафиксируем n конфигураций расположения основных, а также совокупности основных и резервных конфигураций СГ относительно осей связанного базиса OXYZ, где n=0, 1, 2, 3 ... Для рассмотренного примера основным соответствуют конфигурации СГ по схемам расположения, представленным на фиг.1, 5, 6, а по совокупности основных и резервных - на фиг.2, 4. При этом рассматриваем случай работоспособности всех СГ, определенных в систему.
Далее рассматриваем совокупность областей располагаемых значений вектора кинетического момента Sn (S0, S1, S2, S3, Sr)∈Sn.
Проверяем по прогнозу выполнение условий (1) и (2). Например, для стабилизации углового движения ГСС в процессе маневра заданной продолжительности условия (1) и (2) с использованием СГ с областями S0 и Sr не выполняется. Для выполнения указанного динамического режима заданной продолжительности требуется дополнительная разгрузка СГ при помощи РД. Указанная разгрузка может привести к нежелательному изменению параметров орбиты спутника.
В таком случае осуществляем поиск во множестве областей Sn ту, которая обеспечит выполнение динамического режима без дополнительной разгрузки СГ при помощи РД. Поиск осуществляем по выполнению условия:

Области S2 и S3 могут вполне подойти для этого, так как видно, что для рассмотренного выше примера продолжительность маневра с их конфигурацией СГ в ˜1,7 раз больше по сравнению с исходной. В то время как использование основных и резервных СГ в системе, обеспечивающих значение области Sr, позволит по сравнению с исходной увеличить продолжительность маневра в ˜1,6 раза.
Выберем для выполнения режима, например, по выполнению условия
область S1n=S2, S1n∈Sn (см. фиг.5). Для указанной области расположение каждой из осей вращение гироприборов отличается от их расположения для исходной области S0 (см. фиг.1). Следовательно, весь состав СГ необходимо переконфигурировать. Для этого перед проведением i-го динамического режима приводим кинетические моменты каждого из СГ к нулю  . При этом управление кинетическим моментом КА производим с помощью РД или с помощью управляющих моментов от внешних сил, удерживая заданную ориентацию аппарата. Далее производим изменение конфигурации расположения обнуленных СГ относительно осей связанного базиса КА путем перестановки СГ в положения, соответствующие потребной для выполнения i-го динамического режима области S2 (см. фиг.5).
. При этом управление кинетическим моментом КА производим с помощью РД или с помощью управляющих моментов от внешних сил, удерживая заданную ориентацию аппарата. Далее производим изменение конфигурации расположения обнуленных СГ относительно осей связанного базиса КА путем перестановки СГ в положения, соответствующие потребной для выполнения i-го динамического режима области S2 (см. фиг.5).
В случае выполнения условия (3) для определенных вариантов областей Sn (например, для S2 и S3) производят прогноз изменения вектора  для (i+1)-x динамических режимов, например: стабилизация при коррекции орбиты + программный разворот + поддержание заданной ориентации и т.д. Далее для указанной последовательности производим проверку выполнения условия (3) для различных конфигураций областей Sn. В управление выбираем конфигурацию СГ, область располагаемых значений которой позволит обеспечить максимальную продолжительность выполнения (i+1)-x динамических режимов КА без разгрузки СГ от накопленного кинетического момента при помощи РД, S2n∈Sn. Приоритет в стратегии управления КА отдается сохранению запасов рабочего тела для РД, запасы которого на борту не восполнимы, либо требуют больших затрат по доставке на борт. При этом в процессе выполнения динамических режимов с помощью системы СГ, как правило, применяется их разгрузка от накопленного кинетического момента с использованием внешних возмущающих моментов Мв (гравитационного, от сил светового давления и др.). Резервный СГ наиболее целесообразно использовать для управления в динамическом контуре КА в тех случаях, когда по каким-то причинам основные СГ одни не справляются с управлением кинетическим моментом КА. Такие ситуации могут возникнуть кратковременно, например, по причине нерасчетного накопления кинетического момента в указанной системе. Далее можно осуществить разгрузку системы с помощью Мв и отключить резервные СГ от управления.
для (i+1)-x динамических режимов, например: стабилизация при коррекции орбиты + программный разворот + поддержание заданной ориентации и т.д. Далее для указанной последовательности производим проверку выполнения условия (3) для различных конфигураций областей Sn. В управление выбираем конфигурацию СГ, область располагаемых значений которой позволит обеспечить максимальную продолжительность выполнения (i+1)-x динамических режимов КА без разгрузки СГ от накопленного кинетического момента при помощи РД, S2n∈Sn. Приоритет в стратегии управления КА отдается сохранению запасов рабочего тела для РД, запасы которого на борту не восполнимы, либо требуют больших затрат по доставке на борт. При этом в процессе выполнения динамических режимов с помощью системы СГ, как правило, применяется их разгрузка от накопленного кинетического момента с использованием внешних возмущающих моментов Мв (гравитационного, от сил светового давления и др.). Резервный СГ наиболее целесообразно использовать для управления в динамическом контуре КА в тех случаях, когда по каким-то причинам основные СГ одни не справляются с управлением кинетическим моментом КА. Такие ситуации могут возникнуть кратковременно, например, по причине нерасчетного накопления кинетического момента в указанной системе. Далее можно осуществить разгрузку системы с помощью Мв и отключить резервные СГ от управления.
Поэтому при поиске потребной области располагаемых значений вектора кинетического момента системы СГ необходимо рассматривать и области с подключением резервных гироскопов, в случае, если этим удастся избежать разгрузки с использованием РД.
В случае невыполнения условия (3) ни для одного из вариантов Sn, очевидно, что для выполнения предстоящего динамического режима потребуется разгрузка СГ от накопленного кинетического момента с использованием РД. Для выбранной стратегии управления КА, направленной на максимальное сохранение запасов рабочего тела, указанную разгрузку на РД необходимо проводить оптимальным образом. Режимы указанной оптимальной разгрузки подробно представлены в [6, 7, 8], где рассматривается также подробно и прогноз значений вектора  , по результатам которого разгрузка планируется.
, по результатам которого разгрузка планируется.
Таким образом, предлагается провести прогноз изменения суммарного вектора кинетического момента  с учетом каждой из (n)-х схем конфигурации СГ области Sn с использованием РД для разгрузки от накопленного кинетического момента. В зависимости от конфигурации области и динамики последующего режима количество затраченного топлива будет разное. Выбор же области S3n∈Sn и по ней конфигурации СГ производим по минимальному расходу рабочего тела, затраченного на разгрузку при реализации i-го режима. При это прогноз осуществляется с учетом
с учетом каждой из (n)-х схем конфигурации СГ области Sn с использованием РД для разгрузки от накопленного кинетического момента. В зависимости от конфигурации области и динамики последующего режима количество затраченного топлива будет разное. Выбор же области S3n∈Sn и по ней конфигурации СГ производим по минимальному расходу рабочего тела, затраченного на разгрузку при реализации i-го режима. При это прогноз осуществляется с учетом  , от которого также во многом зависит динамика последующего режима.
, от которого также во многом зависит динамика последующего режима.
Далее, для одной из выбранных областей S2n или S3n производим изменение конфигурации СГ в системе вышеуказанным образом, аналогично изменению конфигурации СГ, проведенной для области Sn1.
После окончательного выбора одной из областей S2n или S3n и по завершении соответствующего ему изменению конфигурации СГ производим управление кинетическим моментом КА с использованием схемы СГ по выбранной области.
После завершения i-го динамического режима производим повторную проверку выполнения условия (1) для последующего (i+1)-го динамического режима, приняв в качестве исходной S0 выбранную текущую конфигурацию из областей S1n, S2n, S3n.
В случае выполнения условия (1) производим выполнение (i+1)-го динамического режима с использованием основных СГ без изменения их конфигурации. При этом, если в предыдущем случае задействовались основные и резервные СГ, то при проведении указанного режима задействуют в динамический контур КА только основные СГ.
В случае невыполнения условия (1) производим проверку выполнения условия (2) и в случае его выполнения задействуем в динамическом контуре управления КА основные и резервные СГ для управления кинетическим моментом КА.
При невыполнении условия (2) производим поиск вариантов изменения конфигурации системы СГ до выполнения условия (3). По завершении поиска производим само изменение конфигурации СГ по вышеописанному алгоритму и далее выполняем последующий динамический режим с использованием в динамическом контуре управления КА вновь выбранной конфигурации.
Реализацию предлагаемого способа может произвести экипаж пилотируемого КА. Так, например, на орбитальных космических станциях изменение конфигурации системы СГ (2-степенных гиродинов) может быть выполнена экипажем. Для 2-степенных силовых гироскопов после остановки гироскопа и отключения от управления привода оси прецессии космонавты могут демонтировать гироблок в целом. Далее производится его перенос и установка на новое посадочное место, которое заранее подготовлено в базисе OXYZ станции для соответствующей области Sn. Управляющий интерфейс системы управления движением (СУД) международной космической станции (МКС) позволяет отключать от динамического контура управления один из СГ. При этом управление реализуется при помощи бортовой цифровой вычислительной системы.
После переноса и установки СГ управляющими признаками задается в СУД номер новой (n)-й конфигурации СГ, по которой формируются в дальнейшем законы управления кинетическим моментом МКС.
Главный положительный эффект предлагаемого способа заключается в возможности перераспределения расходуемых ресурсов работающих СГ внутри системы и экономии ресурса работы других систем КА за счет ресурсов самой системы СГ. Так, например, наиболее целесообразно (см. фиг.4) вести управление с четырьмя одностепенными СГ, расположенными по сторонам четырехранной пирамиды, так как область S1>Sr, см. фиг.2.
Увеличение параметров области Sn ведет к увеличению управляемости кинетическим моментом КА в целом, без расхода рабочего тела в РД: увеличению угловой скорости при программных разворотах; увеличению продолжительности режимов поддержания заданной ориентации и стабилизации при коррекции орбиты КА и др. В свою очередь это ведет к экономии полетного времени КА (например, затраченного на программные развороты), а также одного из основных ресурсных параметров КА рабочего тела РД.
При отказе одного из СГ, работающих в схеме, указанной на фиг.4, целесообразно изменить конфигурацию оставшихся СГ и привести их к схеме, указанной на фиг.1, с разложением по осям связанного базиса, так как в этом случае S0>S2, S0>S3 и т.д.
Увеличение параметров области располагаемых значений ведет также к экономии ресурса других систем КА. Так, увеличение продолжительности работы стационарных плазменных двигателей (СПД) при проведении маневра, зависящей от одновременной проводимой угловой стабилизацией КА с использованием СГ (см. [5]), приводит к сокращению числа включений СПД. Число включений указанного двигателя является одним из основных расходуемых ресурсов, определяющих срок его службы.
Специальное изменение конфигурации системы СГ, при которой обеспечивается "вытянутость" области относительно одной (или двух) осей связанного базиса (см. фиг.3), может увеличить продолжительность маневра. При этом учитывается величина и направленность действия управляющих моментов от РД, приводящих к насыщению системы СГ.
Возможность управления расходуемыми ресурсами КА позволяет в целом продлить срок его существования на орбите. Так, например, при выходе из строя одного и более СПД увеличивается нагрузка при выполнении программы полета по числу включений на оставшиеся. Уменьшить указанную нагрузку по числу включений можно путем увеличения продолжительности работы оставшихся в работоспособном состоянии СПД, выбрав для стабилизации в процессе коррекции орбиты соответствующую конфигурацию СГ.
На основании вышеизложенного изменение конфигурации системы СГ можно рассматривать как функциональный резерв не только непосредственно для нее, а и для других систем КА.
Литература
1. Е.Н.Токарь, В.П.Легостаев, М.В.Михайлов, В.Н.Платонов. Управление избыточными гиросиловыми системами. Космические исследования. т.XVIII. Вып.2. 1980, стр.147-156.
2. B.C.Ковтун, Ю.Р.Банит, А.Н.Чернопятов, В.Н.Платонов. Способ управления кинетическим моментом КА в процессе коррекции орбиты и система для его осуществления. Патент RU 2209160 от 03.12.2001 г.
3. Патент US 6089508 от 02.03.1998 г.
4. В.Н.Бранец, Е.Ф.Земсков, B.C.Ковтун, В.Н.Платонов, А.В.Шестаков. Способ управления КА, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг, система для реализации способа, блок реактивных двигателей системы. Патент RU 2124461 от 12.11.1997 г.
5. А.В.Соколов, Ю.П.Улыбышев. Многовитковые маневры с малой тягой в окрестности геостационарной орбиты. Изв. Академии наук. Теория и системы управления. 1999 г. №2, стр.95-100.
6. В.С.Ковтун, В.Н.Платонов. Способ управления КА с помощью реактивных исполнительных органов при выполнении режимов ориентации. Патент RU 2066207 от 10.03.1996 г.
7. В.С.Ковтун, В.Н.Платонов. Способ управления космическим аппаратом с помощью реактивных исполнительных органов при выполнении программного разворота. Патент RU 2098325 от 05.12.1995 г.
8. В.С.Ковтун, В.Н.Платонов. Способ управления космическим аппаратом с помощью реактивных исполнительных органов при поддержании заданной ориентации. Патент RU 2112713 от 16.05.1996 г.
Изобретение относится к области управления угловым движением космических аппаратов (КА). Предлагаемый способ включает измерение суммарного кинетического момента  в системе силовых гироскопов (СГ) и прогноз его текущих значений на выполнение каждого из серии динамических режимов КА. При прогнозах проверяется условие принадлежности вектора
в системе силовых гироскопов (СГ) и прогноз его текущих значений на выполнение каждого из серии динамических режимов КА. При прогнозах проверяется условие принадлежности вектора  определенным областям его располагаемых значений, в зависимости от выполнения которого выбираются те или иные области и состав СГ. При этом изначально фиксируют на КА множество конфигураций расположения основных, а также совокупности основных и резервных СГ относительно осей связанного базиса КА. Для каждой из конфигураций определяют указанные области располагаемых значений . Конфигурации СГ зависят от особенностей конструкции КА и его динамических режимов. В процессе управления системой СГ достигается рациональное перераспределение расходуемых ресурсов работающих СГ и экономия ресурсов других систем КА. Появляются возможности увеличения размеров областей располагаемых значений , позволяющие управлять данным вектором без включения реактивных двигателей разгрузки СГ. Технический результат изобретения состоит в повышении управляемости КА посредством СГ и минимизации затрат рабочего тела реактивных двигателей разгрузки. 6 ил.
определенным областям его располагаемых значений, в зависимости от выполнения которого выбираются те или иные области и состав СГ. При этом изначально фиксируют на КА множество конфигураций расположения основных, а также совокупности основных и резервных СГ относительно осей связанного базиса КА. Для каждой из конфигураций определяют указанные области располагаемых значений . Конфигурации СГ зависят от особенностей конструкции КА и его динамических режимов. В процессе управления системой СГ достигается рациональное перераспределение расходуемых ресурсов работающих СГ и экономия ресурсов других систем КА. Появляются возможности увеличения размеров областей располагаемых значений , позволяющие управлять данным вектором без включения реактивных двигателей разгрузки СГ. Технический результат изобретения состоит в повышении управляемости КА посредством СГ и минимизации затрат рабочего тела реактивных двигателей разгрузки. 6 ил.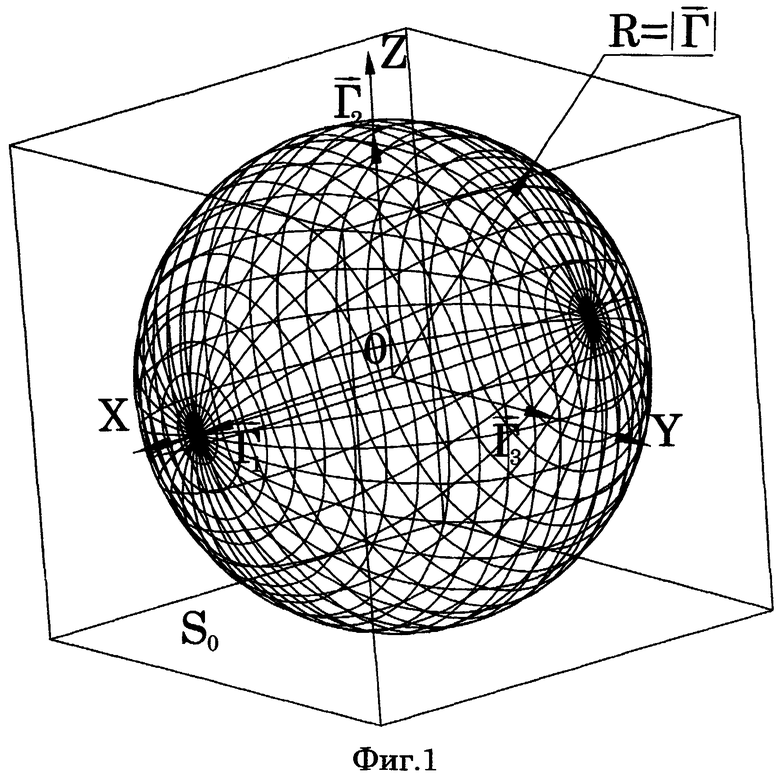
Способ управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов, включающий измерение кинетического момента в системе силовых гироскопов в момент времени to начала проведения i-го динамического режима космического аппарата, где i=1, 2, 3..., измерения вектора угловой скорости космического аппарата в указанный момент времени, определение по известным значениям моментов инерции космического аппарата, а также по измеренным значениям вектора угловой скорости космического аппарата и кинетического момента силовых гироскопов суммарного вектора кинетического момента  , прогноз текущих значений суммарного вектора кинетического момента
, прогноз текущих значений суммарного вектора кинетического момента  G на выполнение i-го динамического режима космического аппарата, проверку выполнения условия
G на выполнение i-го динамического режима космического аппарата, проверку выполнения условия

где S0 - исходная область располагаемых значений вектора кинетического момента основных силовых гироскопов системы, и в случае его выполнения выбор для управления кинетическим моментом космического аппарата основных силовых гироскопов системы, обеспечивающих проведение i-го динамического режима с выполнением условия (1), а в случае невыполнения условия (1) проведение проверки выполнения условия

где Sr - область располагаемых значений вектора кинетического момента основных и резервных силовых гироскопов системы, и в случае его выполнения выбор для управления кинетическим моментом космического аппарата основных и резервных силовых гироскопов системы, обеспечивающих выполнение условия (2), а в случае невыполнения условия (2) разгрузку силовых гироскопов от накопленного кинетического момента с помощью реактивных двигателей, отличающийся тем, что до начала выполнения динамических режимов фиксируют на космическом аппарате n конфигураций расположения основных, а также совокупности основных и резервных силовых гироскопов относительно осей связанного базиса, где n=0, 1, 2, 3,..., для каждой из которых определяют области располагаемых значений вектора кинетического момента Sn, а в случае невыполнения условия (2) в момент времени to прогноз выполнения i-го динамического режима по кинетическому моменту производят в отношении условия

и в случае его выполнения для выбранной области S1n∈Sn сравнивают расположение силовых гироскопов с их расположением для областей S0 и Sr, по результатам сравнения определяют состав силовых гироскопов, не совпадающий по конфигурации установки для выбранной области S1n, перед проведением i-го динамического режима производят управление кинетическим моментом космического аппарата при помощи реактивных исполнительных органов до обнуления кинетического момента каждого из инерционных элементов несовпадающих по конфигурации силовых гироскопов, далее производят изменение конфигурации расположения обнуленных силовых гироскопов относительно осей связанного базиса космического аппарата путем перестановки силовых гироскопов в положения, соответствующие потребной для выполнения i-го динамического режима области S1n, в случае выполнения условия (3) для определенных вариантов областей Sn осуществляют выбор области S2n∈Sn, конфигурация расположения силовых гироскопов которой позволяет обеспечить максимальную продолжительность выполнения (i+1)-x динамических режимов без разгрузки силовых гироскопов при помощи реактивных двигателей, а в случае, если условие (3) не выполняется ни для одного из вариантов Sn, производят прогноз изменения суммарного вектора кинетического момента  i(t) с учетом каждой из n конфигураций расположения силовых гироскопов области Sn и с использованием реактивных двигателей для разгрузки от накопленного кинетического момента, при этом выбор области S1n∈Sn и по ней конфигурации расположения силовых гироскопов производят с учетом режима разгрузки, соответствующего минимальному расходу рабочего тела на разгрузку, далее производят изменение конфигурации расположения силовых гироскопов в системе вышеуказанным образом для одной из выбранных областей S2n или S3n аналогично изменению конфигурации силовых гироскопов, проведенной для области S1n, и по ее завершению производят управление кинетическим моментом космического аппарата с использованием выбранной из областей S2n или S3n конфигурации расположения силовых гироскопов, а по завершении указанного i-го динамического режима производят повторную проверку условия (1) для последующего (i+1)-го динамического режима, приняв за исходную So выбранную текущую конфигурацию расположения силовых гироскопов из областей S1n, S2n, S3n, далее, в случае выполнения условия (1), производят выполнение (i+1)-го динамического режима с использованием основных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае производят проверку выполнения условия (2) для выбранной конфигурации расположения силовых гироскопов, и если оно выполняется, то производят выполнение (i+1)-го динамического режима с использованием основных и резервных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае повторяют цикл поиска из n конфигураций расположения силовых гироскопов по условию (3) вышеуказанным образом, с последующим изменением конфигурации расположения силовых гироскопов и выполнением динамических режимов за счет управления кинетическим моментом космического аппарата на интервале (i+1)-го динамического режима с использованием вновь измененной конфигурации расположения силовых гироскопов.
i(t) с учетом каждой из n конфигураций расположения силовых гироскопов области Sn и с использованием реактивных двигателей для разгрузки от накопленного кинетического момента, при этом выбор области S1n∈Sn и по ней конфигурации расположения силовых гироскопов производят с учетом режима разгрузки, соответствующего минимальному расходу рабочего тела на разгрузку, далее производят изменение конфигурации расположения силовых гироскопов в системе вышеуказанным образом для одной из выбранных областей S2n или S3n аналогично изменению конфигурации силовых гироскопов, проведенной для области S1n, и по ее завершению производят управление кинетическим моментом космического аппарата с использованием выбранной из областей S2n или S3n конфигурации расположения силовых гироскопов, а по завершении указанного i-го динамического режима производят повторную проверку условия (1) для последующего (i+1)-го динамического режима, приняв за исходную So выбранную текущую конфигурацию расположения силовых гироскопов из областей S1n, S2n, S3n, далее, в случае выполнения условия (1), производят выполнение (i+1)-го динамического режима с использованием основных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае производят проверку выполнения условия (2) для выбранной конфигурации расположения силовых гироскопов, и если оно выполняется, то производят выполнение (i+1)-го динамического режима с использованием основных и резервных силовых гироскопов, сохраняя конфигурацию расположения силовых гироскопов на момент повторной проверки, в противном случае повторяют цикл поиска из n конфигураций расположения силовых гироскопов по условию (3) вышеуказанным образом, с последующим изменением конфигурации расположения силовых гироскопов и выполнением динамических режимов за счет управления кинетическим моментом космического аппарата на интервале (i+1)-го динамического режима с использованием вновь измененной конфигурации расположения силовых гироскопов.
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2209160C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 6089508 А, 18.07.2000. | |||

