Изобретение относится к измерительной технике, в частности к устройствам измерения углов поворота, и может быть использовано в устройствах автоматики для получения напряжений, пропорциональных углу поворота.
Для измерения углов поворота в устройствах автоматики могут использоваться вращающиеся трансформаторы. Такие трансформаторы конструктивно выполняют так же, как асинхронный двигатель с фазным ротором. Как правило, на статоре и роторе размещено по две обмотки, сдвинутые между собой на 90 эл. град. (Н.И.Волков, В.П.Миловзоров. Учебник для вузов. - М.: Высшая школа, 1986, с.198). Статорная обмотка подключается к источнику переменного напряжения, выходное напряжение снимается с роторных обмоток. Однако такие трансформаторы позволяют получить линейную зависимость выходного напряжения лишь при изменении угла в пределах 4,5°.
Наиболее близким к предлагаемому является линейный вращающийся трансформатор, содержащий статор, на котором размещены главная и вспомогательная статорные обмотки, и ротор, на котором размещены синусная и косинусная роторные обмотки. В линейном вращающемся трансформаторе с помощью специальной схемы включения обмоток можно получить на выходе напряжение в виде функции

где α - угол поворота. При С=0,52 линейность выходного напряжения обеспечивается с точностью до 0,1% в пределах углов до 55° (Н.И.Волков, В.П.Миловзоров. Учебник для вузов. - М.: Высшая школа, 1986, с.204). Таким образом, в пределах углов до 55° можно получить с точностью до 0,1% зависимость выходного напряжения от входного и угла поворота в виде Uвых=кUвхα, где к - коэффициент трансформации.
Существенным недостатком такого датчика является малый диапазон углов поворота, на котором обеспечивается линейность выходной характеристики и низкая точность измерения углов при их измерении в большем диапазоне.
Технической задачей изобретения является повышение точности измерения углов поворота при увеличении диапазона их измерений.
Указанная задача достигается тем, что согласно изобретению в датчик угла, включающий вращающийся трансформатор, содержащий ротор и статор с обмотками, введен дополнительно второй статор, который жестко связан с осью датчика, и на котором установлены два упора, причем соответствующие обмотки обоих статоров соединены параллельно, первый статор жестко связан с основанием датчика, а ротор расположен с возможностью создания взаимной индукции между его обмотками и обмотками обоих статоров и установлен подвижно на оси датчика, и имеет упор, установленный между упорами второго статора.
Существенным отличием предлагаемого технического решения является введение в датчик второго статора, возможность поворота ротора относительно обоих статоров и ограничение углов поворота ротора относительно одного из статоров линейным участком выходной характеристики с помощью установленных упоров. Параллельное соединение обмоток статоров позволяет получить выходной сигнал с ротора датчика при повороте его относительно каждого из статоров, а если поворот осуществляется одновременно относительно обоих статоров, то выходной сигнал будет пропорционален суммарному углу поворота оси датчика относительно его основания. При этом если поворот ротора относительно каждого из статоров осуществляется в пределах линейного участка выходной характеристики, то и суммарный выходной сигнал датчика от поворота ротора относительно обоих статоров также будет в пределах линейного участка выходной характеристики. Таким образом, линейный участок выходной характеристики увеличивается вдвое, т.е. такой датчик с двумя статорами позволяет получать линейную выходную характеристику при повороте оси датчика относительно основания на углы, в два раза большие, чем у датчика с одним статором.
На фиг.1 показан датчик угла при повороте второго статора относительно ротора.
На фиг.2 показан датчик угла при повороте второго статора вместе с ротором относительно первого статора.
Датчик угла содержит основание 1 и жестко связанный с ним первый статор 2, второй статор 3 с установленными на нем упорами 4 и 5 и жестко связанный с осью датчика 6, ротор 7 с установленным на нем упором 8.
Второй статор 3 жестко связан осью 6 датчика и может поворачиваться вместе с ней относительно ротора 7 на угол α1=0-А. Ротор 7 может поворачиваться относительно второго статора 3 на угол α1 (фиг.1), а относительно первого статора 2 на угол α2 (фиг.2). Между упорами 4 и 5, расположенными на втором статоре 3, находится упор 8, расположенный на роторе 7. Одноименные обмотки обоих статоров соединены параллельно.
На фиг.1 и фиг.2 линия Ос1 жестко связана с основанием датчика 1 и первым статором 2, линия Ос2 жестко связана со вторым статором 3 и осью 6 и является биссектрисой угла между упорами 4 и 5, установленными на втором статоре 3. Линия Ор жестко связана с ротором 7 и совпадает с положением упора 8, установленного на роторе 7. В исходном положении при отсутствии поворота оси датчика относительно основания эти три линии совпадают, и сигнал на выходе датчика отсутствует.
Поворот оси 6 датчика относительно основания 1 вызывает поворот второго статора 3 относительно ротора 7 на угол α1 (фиг.1), при этом магнитный поток в роторе, индуктирующий ЭДС в его обмотках, пропорционален этому углу. При повороте оси 6 на угол α1=А упор 4 второго статора 3 дойдет до упора 8 ротора 7. При повороте на угол α1>A ось 6 вместе со вторым статором 3 и ротором 7 будет поворачиваться относительно первого статора 2 на угол α2 (фиг.2), что вызывает появление магнитного потока в роторе, пропорционального углу α2. ЭДС в обмотках ротора будет пропорциональна сумме двух магнитных потоков, каждый из которых пропорционален углам α1 и α2 соответственно, т.е. пропорциональна сумме этих двух углов.
Величина угла А, на который разведены упоры второго статора относительно упора ротора в их исходном положении, может быть определена исходя из требований к линейности выходной характеристики. Так, при взятии за основу конструкции прототипа, обеспечивающего линейность выходной характеристики с точностью до 0,1%, эта величина составит 55°. При повороте оси относительно основания на угол α=α1+α2=2А линейность выходной характеристики будет аналогичной повороту оси датчика относительно основания на угол α=А, т.е. предлагаемое устройство может обеспечить точность 0,1% при измерении углов в пределах до 110°, что вдвое больше, чем у прототипа.
Таким образом, предлагаемое техническое решение позволяет повысить точность измерения углов поворота при увеличении диапазона их измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2008 |
|
RU2379627C1 |
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2013 |
|
RU2529825C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2015 |
|
RU2605005C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2474519C2 |
| ЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2460199C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| Устройство для измерения момента электрических микромашин | 1978 |
|
SU717575A1 |

Изобретение относится к измерительной технике и может быть использовано в устройствах автоматики для получения выходных напряжений, пропорциональных углу поворота. Датчик угла включает в себя вращающийся трансформатор, содержащий ротор и статор с обмотками. При этом в датчик введен дополнительно второй статор, жестко связанный с осью датчика, на котором установлены два упора, причем одноименные обмотки обоих статоров соединены параллельно. Первый статор жестко связан с основанием датчика. Ротор расположен с возможностью создания взаимной индукции между его обмотками и обмотками обоих статоров и установлен подвижно на оси датчика, а также ротор имеет упор, установленный между упорами второго статора. Технический результат - повышение точности измерения углов поворота при увеличении диапазона их измерений. 2 ил.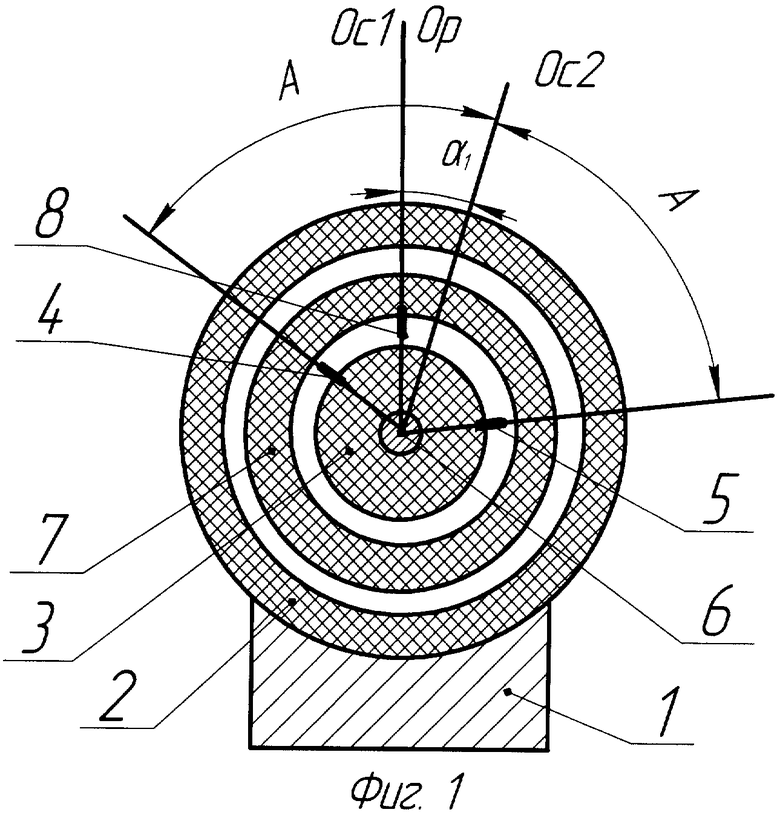
Датчик угла, включающий вращающийся трансформатор, содержащий ротор и статор с обмотками, отличающийся тем, что в датчик введен дополнительно второй статор, который жестко связан с осью датчика и на котором установлены два упора, причем одноименные обмотки обоих статоров соединены параллельно, первый статор жестко связан с основанием датчика, а ротор расположен с возможностью создания взаимной индукции между его обмотками и обмотками обоих статоров и установлен подвижно на оси датчика и имеет упор, установленный между упорами второго статора.
| ВОЛКОВ Н.И., МИЛОВЗОРОВ В.П | |||
| Учебник для вузов | |||
| - М.: Высшая школа, 1986, с.204 | |||
| RU 94015195 А1, 20.04.1996 | |||
| Устройство для получения диаграмм в процессе выдувания стеклянных изделий | 1933 |
|
SU34722A1 |
| Бесконтактный многоканальный датчик угла | 1987 |
|
SU1538207A1 |
| JP 2003097907 A, 03.04.2003 | |||
| US 6232771 B1, 15.05.2001. | |||

