Изобретение относится к измерительной технике и может быть использовано для определения углов наклона, в частности, подвижных объектов.
Известны устройства для определения углов наклона подвижных объектов, использующие в своем составе маятник (авторское свидетельство СССР №727992, кл. G01C 9/12, 1976 г.; авторское свидетельство СССР №1500823, кл. G01C 9/12, 1987 г.). Наличие маятника делает зависимым показания датчиков от линейных ускорений, действующих на подвижный объект. Применение демпферов, компенсаторов действия инерционных сил усложняет конструкция, но не устраняет полностью влияния линейных ускорений.
Наиболее близким к предлагаемому изобретению является маятниковый датчик угла наклона (авторское свидетельство СССР №1776992, кл. G01C 9/12, 2.01.1990 г.), в котором маятник выполнен в виде поперечного стержня, соединенного боковыми стержнями через зубчатую рейку с зубчатым колесом индукционного преобразователя.
Существенным недостатком такого датчика является наличие зубчатых соединений, взаимодействующих при действии линейных ускорений, а также пружинных связей, обеспечивающих возврат в исходное положение стержней при прекращении действия ускорения. Сопротивление перемещению стержней при действии линейных ускорений приведет к некоторому повороту рамки, образованной стержнями, относительно ось датчика и, следовательно, появлению погрешности измерения угла наклона.
Технической задачей изобретения является повышение точности измерения угла наклона объекта при его движении.
Указанная задача достигается тем, что согласно изобретению, вторые концы каждого из боковых стержней маятниковый датчик угла наклона неподвижно соединены с роторами соответствующих вращающихся трансформаторов, находящихся на площадке, установленной подвижно на оси подвеса датчика наклона, вращающиеся трансформаторы установлены симметрично относительно оси датчика и на расстоянии друг от друга, обеспечивающем образование стержнями в точках их соединения параллелограмма, статор каждого вращающегося трансформатора скреплен соосно с шестерней и, как и его ротор, установлен с возможностью поворота относительно оси вращающегося трансформатора, на оси датчика наклона жестко установлена шестерня, входящая в зацепление с шестерней статора одного из вращающихся трансформаторов и через дополнительную шестерню с шестерней второго вращающегося трансформатора, обмотки роторов вращающихся трансформаторов соединены последовательно и встречно.
Существенным отличием предлагаемого технического решения является то, что вторые концы каждого из боковых стержней маятниковый датчик угла наклона неподвижно соединены с роторами соответствующих вращающихся трансформаторов, находящихся на площадке, установленной подвижно на оси подвеса датчика наклона, вращающиеся трансформаторы установлены симметрично относительно оси датчика и на расстоянии друг от друга, обеспечивающем образование стержнями в точках их соединения параллелограмма, статор каждого вращающегося трансформатора скреплен соосно с шестерней и, как и его ротор, установлен с возможностью поворота относительно оси вращающегося трансформатора, на оси датчика наклона жестко установлена шестерня, входящая в зацепление с шестерней статора одного из вращающихся трансформаторов и через дополнительную шестерню с шестерней второго вращающегося трансформатора, обмотки роторов вращающихся трансформаторов соединены последовательно и встречно.
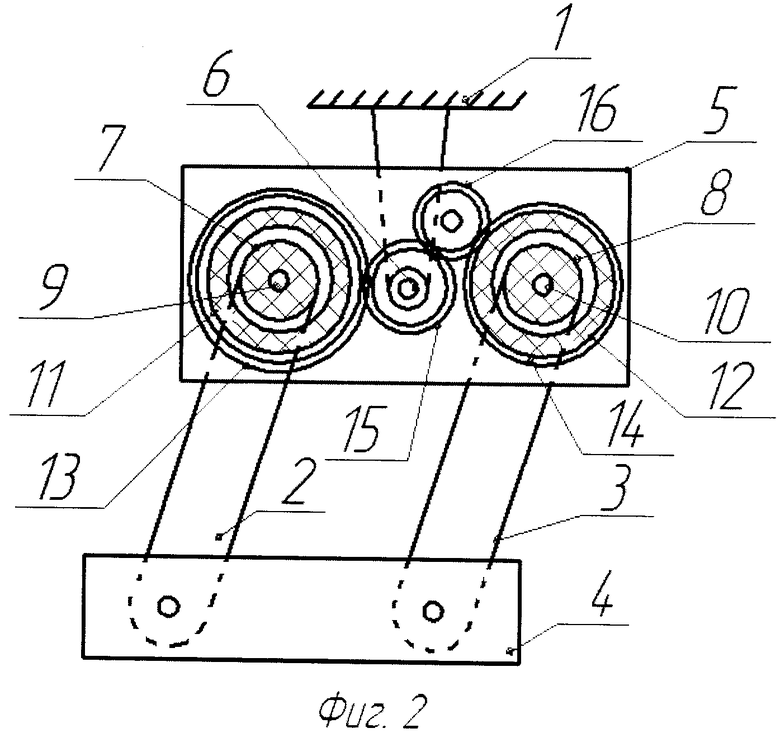
На фиг.1 показан маятниковый датчик угла наклона подвижного объекта 1, маятник которого выполнен в виде и двух боковых 2 и 3 стержней, соединенных нижними концами шарнирно с поперечным стержнем 4. Верхние концы боковых стержней 2 и 3 шарнирно соединены с площадкой 5, установленной на оси 6 подвеса датчика. Верхние концы боковых стержней 2 и 3 жестко соединены с роторами 7 и 8 вращающихся трансформаторов 9 и 10 соответственно. Статоры 11 и 12 вращающихся трансформаторов 9 и 10 жестко и соосно скреплены с шестернями 13 и 14 вращающихся трансформаторов 9 и 10 соответственно и могут поворачиваться относительно осей вращающихся трансформаторов, как и их роторы. На оси подвеса 6 жестко установлена шестерня 15, входящая в зацепление с шестерней 13, скрепленной со статором 11 вращающегося трансформатора 9, и входящая в зацепление через промежуточную шестерню 16 с шестерней 14, скрепленной со статором 12 вращающегося трансформатора 10. Обмотки роторов 7 и 8 вращающихся трансформаторов соединены последовательно и встречно.
На фиг.2 показано перемещение поперечного и боковых стержней датчика при действии на подвижный объект линейного ускорения.
В исходном положении при отсутствии наклона объекта и действующих на него линейных ускорений суммарный сигнал, снимаемый с обмоток статоров вращающихся трансформаторов, равен нулю.
При наклоне объект поворачивается относительно оси 6 вместе с шестерней 15, которая заставляет поворачиваться шестерни 13 и 14 вместе со скрепленными с ними статорами 11 и 12 вращающихся трансформаторов 9 и 10 в разные стороны относительно их роторов. В роторах 7 и 8 появляется напряжение, а так как обмотки этих роторов соединены встречно, то суммарный сигнал будет равен сумме сигналов обоих роторов и пропорционален углу поворота.
При действии на подвижный объект линейного ускорения будет перемещаться поперечный стержень 4. Так как образованная точками соединения боковых стержней 2 и 3 фигура - параллелограмм, это приведет к повороту роторов 7 и 8 обоих датчиков 9 и 10 относительно их статоров в одну и ту же сторону на один и тот же угол. В роторах 7 и 8 появляется напряжение, а так как обмотки этих роторов соединены встречно, то суммарный сигнал будет равен сумме сигналов обоих роторов и равен нулю.
Таким образом, предлагаемое техническое решение позволяет исключить влияние линейного ускорения при движении объекта на результаты измерения угла его наклона относительно местной вертикали, что повышает точность измерения угла наклона объекта при его движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2015 |
|
RU2605005C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Маятниковый датчик угла наклона | 1990 |
|
SU1776992A1 |
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2008 |
|
RU2379627C1 |
| ДАТЧИК УГЛА | 2007 |
|
RU2342634C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
Изобретение относится к измерительной технике и может быть использовано для определения углов наклона, в частности, подвижных объектов. Заявленный маятниковый датчик угла наклона содержит поперечный и боковые стержни, при этом вторые концы каждого из боковых стержней неподвижно соединены с роторами соответствующих вращающихся трансформаторов, находящихся на площадке, установленной подвижно на оси подвеса датчика наклона, вращающиеся трансформаторы установлены симметрично относительно оси датчика и на расстоянии друг от друга, обеспечивающем образование стержнями в точках их соединения параллелограмма, причем статор каждого вращающегося трансформатора скреплен соосно с шестерней и, как и его ротор, установлен с возможностью поворота относительно оси вращающегося трансформатора, на оси датчика наклона жестко установлена шестерня, входящая в зацепление с шестерней статора одного из вращающихся трансформаторов и через дополнительную шестерню с шестерней второго вращающегося трансформатора, а обмотки роторов вращающихся трансформаторов соединены последовательно и встречно. Технический результат, достигаемый от реализации заявленного изобретения, заключается в повышении точности измерения угла наклона объекта при его движении, посредством исключения влияния линейного ускорения при движении объекта на результаты измерения угла его наклона относительно местной вертикали, что повышает точность измерения угла наклона объекта при его движении. Указанная цель достигается тем, что дифференциальный сигнал с двух вращающихся трансформаторов определяется только поворотом объекта при его наклоне и не чувствителен к колебаниям маятника относительно оси его подвеса при движении объекта. 2 ил.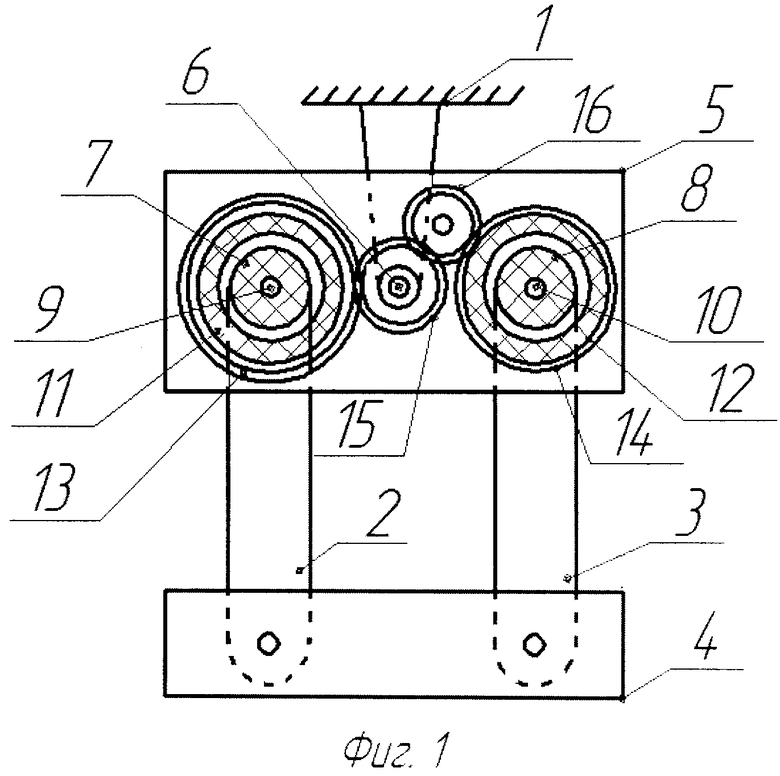
Маятниковый датчик угла наклона, содержащий поперечный и боковые стержни, отличающийся тем, что вторые концы каждого из боковых стержней неподвижно соединены с роторами соответствующих вращающихся трансформаторов, находящихся на площадке, установленной подвижно на оси подвеса датчика наклона, вращающиеся трансформаторы установлены симметрично относительно оси датчика и на расстоянии друг от друга, обеспечивающем образование стержнями в точках их соединения параллелограмма, причем статор каждого вращающегося трансформатора скреплен соосно с шестерней и, как и его ротор, установлен с возможностью поворота относительно оси вращающегося трансформатора, на оси датчика наклона жестко установлена шестерня, входящая в зацепление с шестерней статора одного из вращающихся трансформаторов и через дополнительную шестерню с шестерней второго вращающегося трансформатора, а обмотки роторов вращающихся трансформаторов соединены последовательно и встречно.
| Маятниковый датчик угла наклона | 1990 |
|
SU1776992A1 |
| Маятниковый датчик угла наклона | 1984 |
|
SU1312387A1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| JP 4328415 A, 17.11.1992. | |||

