Изобретение относится к измерительной технике, в частности к устройствам измерения углов поворота, и может быть использовано в устройствах автоматики для получения напряжений, пропорциональных углу поворота.
Для измерения углов поворота в устройствах автоматики могут использоваться вращающиеся трансформаторы, которые конструктивно выполняют так же, как асинхронный двигатель с фазным ротором. Как правило, на статоре и роторе размещено по две обмотки, сдвинутые между собой на 90 эл. град. (Волков Н.И., Миловзоров В.П. Учебник для вузов. - М.: Высшая школа. 1986, с.198). Статорная обмотка подключается к источнику переменного напряжения, выходное напряжение снимается с роторных обмоток. Однако такие трансформаторы позволяют получить линейную зависимость выходного напряжения лишь при изменении угла в пределах 4,5°.
Наиболее близким к предлагаемому является линейный вращающийся трансформатор, содержащий статор и ротор, на которых размещены обмотки. В линейном вращающемся трансформаторе с помощью специальной схемы включения обмоток можно получить на выходе напряжение в виде функции Uвых=кUвхα, где α - угол поворота, к - коэффициент трансформации. При этом можно обеспечить линейность выходного напряжения с точностью до 0,1% в пределах углов до 55° (Волков Н.И., Миловзоров В.П. Учебник для вузов. - М.: Высшая школа. 1986, с.204).
Существенным недостатком такого датчика является малый диапазон углов поворота, на котором обеспечивается линейность выходной характеристики и низкая точность измерения углов при их измерении в большем диапазоне.
Технической задачей изобретения является повышение точности измерения углов поворота при увеличении диапазона их измерений.
Указанная задача достигается тем, что многоступенчатый датчик угла включает вращающийся трансформатор, содержащий ротор и статор в виде первой ступени датчика, в котором согласно изобретению введено дополнительно не менее одной ступени, каждая из которых содержит ротор и статор, причем статор первой ступени жестко связан с основанием, а ротор последней ступени жестко связан с осью датчика, статор каждой последующей ступени и ротор каждой предыдущей ступени жестко связаны между собой и установлены подвижно относительно оси датчика, на роторе каждой, кроме первой, ступени установлен упор, расположенный между двумя упорами, установленными на статоре этой же ступени, а выходные обмотки всех ступеней соединены последовательно.
Существенным отличием предлагаемого технического решения является ведение в датчик дополнительно не менее одной ступени, каждая из которых содержит ротор и статор, причем статор первой ступени жестко связан с основанием, а ротор последней ступени жестко связан с осью датчика, статор каждой последующей ступени и ротор каждой предыдущей ступени жестко связаны между собой и установлены подвижно относительно оси датчика, на роторе каждой, кроме первой, ступени установлен упор, расположенный между двумя упорами, установленными на статоре этой же ступени, а выходные обмотки всех ступеней соединены последовательно. Последовательное соединение выходных обмоток позволяет получить выходной сигнал, пропорциональный суммарному углу поворота роторов относительно их статоров, т.е. углу поворота оси датчика относительно его основания.
На чертеже показан многоступенчатый датчик угла, содержащий две ступени.
Многоступенчатый датчик угла включает вращающийся трансформатор, содержащий статор 1 первой ступени, жестко связанный с основанием 2, ротор 3 первой ступени, жестко связанный со статором 4 последующей ступени, ротор 5 последующей ступени, жестко связанный с осью 6 датчика, упор 7, установленный на роторе 5 последующей ступени, расположенный между упорами 8 и 9, установленными на статоре 4 этой же ступени датчика.
Устройство работает следующим образом. Поворот оси 6 датчика относительно основания 2 вызывает поворот ротора 5 относительно статора 4. При этом сигнал с выходной обмотки этой ступени датчика будет пропорционален этому углу поворота. Когда при дальнейшем повороте упор 7, установленный на роторе 5, дойдет до одного из упоров 8 или 9 (в зависимости от направления поворота) статора 4, поворот ротора 5 относительно статора 4 прекратится, ось 6 вместе с ротором 5, статором 4 и ротором 3 будет поворачиваться относительно статора 1 и в выходных обмотках этой ступени появится напряжение, пропорциональное этому углу.
Последовательное соединение выходных обмоток позволяет суммировать сигнал с обеих обмоток, сигнал на выходе будет пропорционален сумме углов поворота ротора первой ступени относительно статора первой ступени и ротора последующей ступени относительно статора этой же ступени, т.е. пропорционален углу поворота оси датчика относительно его основания.
При этом, если поворот роторов относительно статоров каждой ступени осуществляется в пределах линейного участка выходной характеристики, то и суммарный выходной сигнал датчика также будет в пределах линейного участка выходной характеристики. Следовательно, линейный участок выходной характеристики увеличивается во столько раз, сколько ступеней имеет датчик. В свою очередь, количество ступеней будет определяться диапазоном измерения углов и требованиями к линейности выходной характеристики.
Таким образом, предлагаемое техническое решение позволяет повысить точность измерения углов поворота при увеличении диапазона их измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2013 |
|
RU2529825C1 |
| ДАТЧИК УГЛА | 2007 |
|
RU2342634C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2015 |
|
RU2605005C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| ВЫСОКОПРОИЗВОДИТЕЛЬНАЯ МЕЛЬНИЦА | 2011 |
|
RU2568432C2 |
| Устройство для измерения момента электрических микромашин | 1978 |
|
SU717575A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНОГО УГЛА СКВАЖИННОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2252313C2 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
Изобретение относится к измерительной технике и может быть использовано в устройствах автоматики для получения выходных напряжений, пропорциональных углу поворота. Технический результат: повышение точности измерения углов при увеличении диапазона измерений. Сущность изобретения: многоступенчатый датчик угла включает вращающийся трансформатор, содержащий ротор и статор в виде первой ступени датчика. В датчик введено дополнительно не менее одной ступени, каждая из которых содержит ротор и статор. Статор первой ступени жестко связан с основанием. Ротор последней ступени жестко связан с осью датчика. Статор каждой последующей ступени и ротор каждой предыдущей ступени жестко связаны между собой и установлены подвижно относительно оси датчика. На роторе каждой, кроме первой, ступени установлен упор, расположенный между двумя упорами, установленными на статоре этой же ступени. Выходные обмотки всех ступеней соединены последовательно. 1 ил.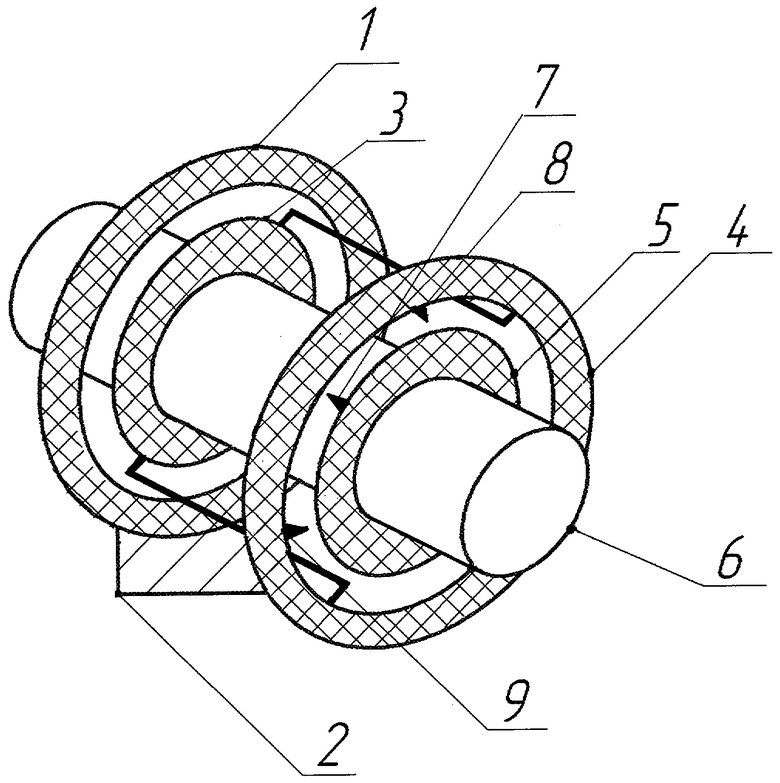
Многоступенчатый датчик угла, включающий вращающийся трансформатор, содержащий ротор и статор в виде первой ступени датчика, отличающийся тем, что в датчик введено дополнительно не менее одной ступени, каждая из которых содержит ротор и статор, причем статор первой ступени жестко связан с основанием, а ротор последней ступени жестко связан с осью датчика, статор каждой последующей ступени и ротор каждой предыдущей ступени жестко связаны между собой и установлены подвижно относительно оси датчика, на роторе каждой, кроме первой, ступени установлен упор, расположенный между двумя упорами, установленными на статоре этой же ступени, а выходные обмотки всех ступеней соединены последовательно.
| Электромашинный кольцевой датчик угла | 1989 |
|
SU1742948A1 |
| Устройство для определения расхода воздуха | 1990 |
|
SU1723441A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

