Изобретение относится к измерительной технике и может быть использовано для определения углов поворота элементов конструкций, в том числе и подвижных объектов.
Известны устройства для определения углов наклона подвижных объектов, использующие в своем составе маятник (авторское свидетельство СССР №727992, кл. G01C 9/12, 1976 г., опубл. 15.04.1980, бюл. №14; авторское свидетельство СССР №1500823, кл. G01C 9/12, 1987 г., опубл. 15.08.1989, бюл. №30, патент на изобретение RU 2500988, МПК G01C 9/12, 2012 г., опубл. 10.12.2013, бюл. №34). Наличие маятника делает зависимым показания датчиков от линейных ускорений, действующих на подвижный объект. Применение демпферов, компенсаторов действия инерционных сил усложняет конструкция, но не устраняет полностью влияния линейных ускорений.
Наиболее близким к предлагаемому изобретению является маятниковый датчик угла наклона (патент на изобретение РФ 2548397, МПК G01C 9/12, 2014 г., опубл. 20.04.2015, бюл. №11), содержащий маятник и два датчика угла, установленные на одной оси, статоры которых соединены между собой посредством промежуточных шестерен, а выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов.
Существенным недостатком такого датчика является наличие одной оси подвеса роторов и наличие промежуточных шестерен. Общая ось подвеса роторов не позволяет иметь менее двух промежуточных шестерен для соединения статоров друг с другом. Это дополнительное количество шестерен увеличивает моменты сил трения и сил инерции подвижных элементов датчика, а в конечном итоге, увеличивает динамическую ошибку датчика. Кроме того, оси промежуточных шестерен данной конструкции ограничивают угол поворота маятника и уменьшают диапазон измерения углов поворота элементов конструкции объекта.
Технической задачей изобретения является увеличение диапазона измерений углов поворота датчика и повышение точности измерения углов поворота подвижных элементов конструкции объекта.
Указанная задача достигается тем, что согласно изобретению каждый из датчиков углов установлен на своей оси, жестко закрепленной на одном из подвижных элементов конструкции, причем шестерни, соединенные со статорами датчиков, находятся в зацеплении между собой, одна из этих шестерен жестко скреплена со вторым подвижным элементом конструкции.
Существенным отличием предлагаемого технического решения является то, что каждый из датчиков углов установлен на своей оси, жестко закрепленной на одном из подвижных элементов конструкции, причем шестерни, соединенные со статорами датчиков, находятся в зацеплении между собой, одна из этих шестерен жестко скреплена со вторым подвижным элементом конструкции.
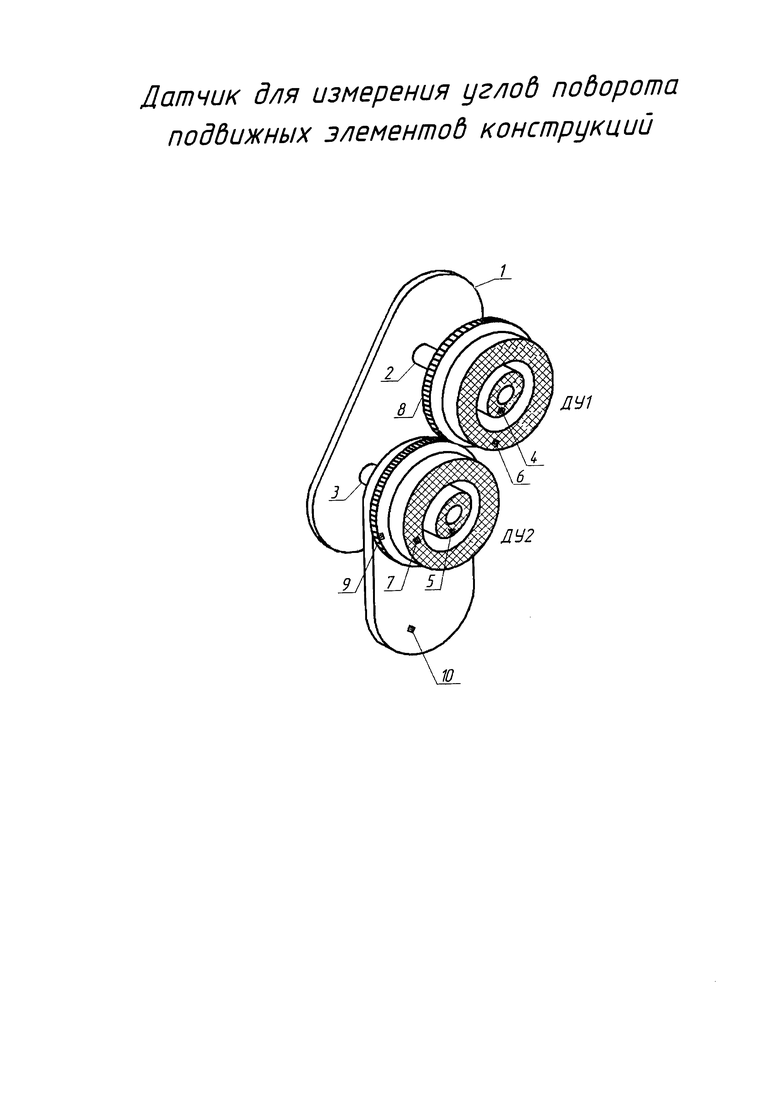
На чертеже показан датчик для измерения углов поворота подвижных элементов конструкций.
На первом подвижном элементе 1 конструкции жестко установлены оси 2 и 3, на которых закреплены роторы 4 и 5 датчиков углов ДУ1 и ДУ2. Статоры 6 и 7 этих датчиков установлены с возможностью их поворота вокруг осей 2 и 3 соответственно. Со статорами 6 и 7 жестко скреплены шестерни 8 и 9 соответственно. Статор 7 и шестерня 9 жестко соединены со вторым подвижным элементом 10 конструкции. Шестерни 8 и 9 находятся в зацеплении и могут поворачиваться в разные стороны вместе со статорами 8 и 9 вокруг осей 2 и 3 соответственно.
Исходное положение датчика определяется при изготовлении прибора или его настройке выставкой статоров 6 и 7 датчиков ДУ1 и ДУ2 относительно их роторов 4 и 5 так, что напряжение, снимаемое с выходных обмоток статоров датчиков, равно нулю:


При повороте подвижного элемента 1 конструкции на угол α вместе с ним поворачиваются установленные на нем оси 2 и 3 с закрепленными на них роторами 4 и 5 датчиков ДУ1 и ДУ2 соответственно на этот же угол α. При этом шестерня 8, обегая шестерню 9, поворачивает статор 6 датчика ДУ1 на угол β1=α.
Напряжение на выходе каждого из датчиков ДУ1 и ДУ2 будет определяться разностью углов поворотов его ротора и статора:

где к - коэффициент передачи датчика угла;
i - номер датчика угла.
В результате получим:



Следовательно, при повороте первого подвижного элемента конструкции напряжение на выходе датчика, равное сумме выходных напряжений обеих датчиков ДУ1 и ДУ2, пропорционально этому углу поворота.
При повороте второго подвижного элемента 10 на угол β будут одновременно поворачиваться оба статора 6 и 7 обоих датчиков ДУ1 и ДУ2 на этот же угол, но в разные стороны. Роторы датчиков останутся неподвижными. Тогда получим:



Следовательно, при повороте второго подвижного элемента напряжение на выходе датчика, равное сумме выходных напряжений обоих датчиков ДУ1 и ДУ2, равно нулю, что опять же соответствует углу поворота первого подвижного элемента.
При повороте обоих подвижных элементов получим:



Следовательно, при повороте обоих подвижных элементов напряжение на выходе датчика, равное сумме выходных напряжений обоих датчиков ДУ1 и ДУ2, пропорционально углу поворота первого подвижного элемента относительно исходного положения. Поворот при этом второго элемента конструкции не влияет на показания датчика.
Таким образом, рассматриваемый датчик углов поворота подвижных элементов конструкции всегда будет выдавать сигнал пропорциональный углу поворота одного из подвижных элементов конструкции относительно исходного положения датчика независимо от положения второго подвижного элемента конструкции. Это свойство может позволить использовать его на кранах для определения угла наклона стрелы, в автоматике и робототехнике, на автомобильном и железнодорожном транспорте для определения углов наклона дорожного полотна в движении, на водном транспорте для определения крена судна, т.е. там, где возникает необходимость определения углов наклона элементов конструкций и самого объекта во время их движения.
Конструкция данного устройства не накладывает ограничений на угол поворота его элементов, что увеличивает диапазон измерений углов поворота датчика. Отсутствие промежуточных шестерен приведет к уменьшению моментов сил трения и сил инерции подвижных элементов датчика и повысит точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| ДАТЧИК УГЛА | 2007 |
|
RU2342634C1 |
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2008 |
|
RU2379627C1 |
| МНОГОСТУПЕНЧАТЫЙ ДАТЧИК УГЛА | 2013 |
|
RU2529825C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| УСТРОЙСТВО КАРДАНОВА ПОДВЕСА ДЛЯ УВЕЛИЧЕНИЯ ДИАПАЗОНА УГЛОВ ПОВОРОТА ИЗДЕЛИЯ | 2017 |
|
RU2654307C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2474519C2 |
Изобретение относится к измерительной технике и может быть использовано для определения углов поворота, в частности, подвижных элементов конструкций объектов. Технической задачей изобретения является увеличение диапазона измерений углов поворота датчика и повышение точности измерения углов поворота подвижных элементов конструкции объекта. Указанная цель достигается тем, что суммарный сигнал с двух датчиков углов определяется поворотом только одного подвижного элемента конструкции и не чувствителен к перемещениям второго подвижного элемента за счет того, что каждый из датчиков установлен на своей оси, жестко закрепленной на одном из подвижных элементов конструкции. Предлагаемое техническое решение позволяет получать сигнал, пропорциональный углу поворота одного из подвижных элементов конструкции относительно исходного положения датчика независимо от положения второго подвижного элемента конструкции. 1 ил.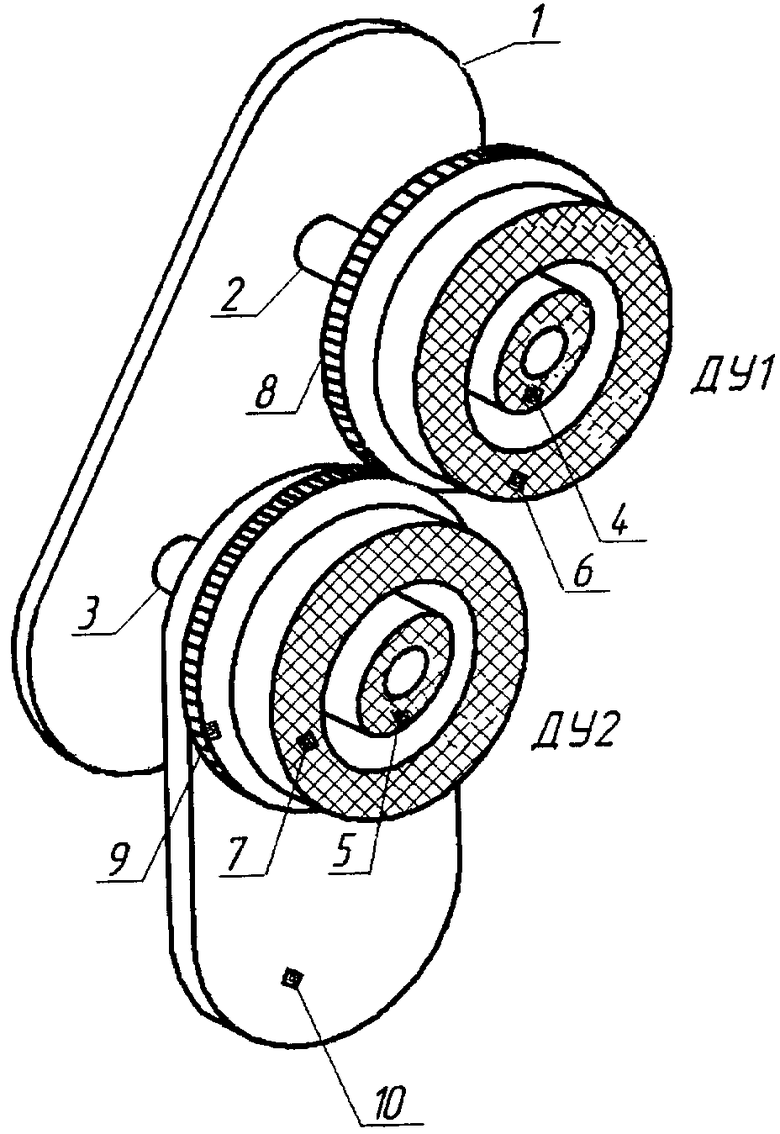
Датчик для измерения углов поворота подвижных элементов конструкций, содержащий два датчика угла, состоящие из статора и ротора, статоры датчиков углов соединены соосно с шестернями, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов, отличающийся тем, что каждый из датчиков углов установлен на своей оси, жестко закрепленной на одном из подвижных элементов конструкции, причем шестерни, соединенные со статорами датчиков, находятся в зацеплении между собой, одна из этих шестерен жестко скреплена со вторым подвижным элементом конструкции.
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| Датчик углов наклона объекта | 1979 |
|
SU832335A1 |
| US 5261279 A1, 16.11.1993. | |||

