ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется по заявке на патент Кореи №10-2006-0118431, поданной 28 ноября 2006 года в Корейское Ведомство Интеллектуальной Собственности и полностью включенной в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение, в целом, относится к роботу-пылесосу и способу управления им.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В общем случае робот-пылесос втягивает посторонние вещества, например пыль или подобные вещества, с нижней поверхности во время перемещения в пределах очищаемой площади самостоятельно без управления пользователем, убирая, таким образом, автоматически поверхность, которая должна быть очищена.
Вышеописанный робот-пылесос содержит датчики различных типов, в частности установленный внутри него датчик препятствий. Датчик препятствий является датчиком, который необходим, чтобы избежать препятствия, расположенного на траектории продвижения робота-пылесоса при его перемещении.
Однако в случае загрязнения защитного окна датчика препятствий посторонним веществом или когда датчик препятствий сломан, но продолжает работать в режиме обнаружения, то есть находится во включенном состоянии, робот-пылесос воспринимает переднюю сторону датчика препятствий как область препятствия, поэтому он совершает поворот, чтобы обойти воспринимаемую область. На данном этапе, если датчик препятствий работает непрерывно, а его поломка не зафиксирована, возникает проблема, которая заключается в том, что робот-пылесос повторяет поворотное движение до тех пор, пока не прекратится его энергоснабжение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспектом данного изобретения является устранение по меньшей мере вышеуказанных проблем и/или недостатков и создание по меньшей мере преимуществ, рассмотренных в дальнейшем. Соответственно, аспектом настоящего изобретения является создание робота-пылесоса и способа управления этим пылесосом, который может самостоятельно обнаруживать выход из строя датчика препятствий для прекращения движения и информирования пользователя об обнаружении выхода из строя датчика препятствий.
Вышеуказанные аспекты данного изобретения достигаются созданием робота-пылесоса, содержащего датчик препятствий, предназначенный для обнаружения препятствия в направлении продвижения основного корпуса пылесоса, датчик угла поворота, предназначенный для измерения угла поворота основного корпуса пылесоса в масштабе реального времени, ведущий узел, предназначенный для перемещения основного корпуса пылесоса, и контроллер, предназначенный для управления ведущим узлом с обеспечением поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий и сравнения угла полного поворота, измеренного датчиком угла поворота, с заданным контрольным углом поворота для прекращения работы ведущего узла, когда полный угол поворота превышает контрольный угол поворота.
Контроллер может определить, что датчик препятствий вышел из строя, когда полный угол поворота превышает контрольный угол поворота.
В соответствии с другим аспектом данного изобретения робот-пылесос дополнительно содержит по меньшей мере один из блоков - звуковой блок или блок отображения, предназначенные для информирования пользователя об обнаружении выхода из строя датчика препятствий.
Контрольный угол поворота может быть задан пользователем путем непосредственного введения численного значения в контроллер.
Предпочтительно, но не обязательно, контрольный угол поворота составляет по меньшей мере 360°.
Соответственно, еще одним аспектом данного изобретения является создание способа управления роботом-пылесосом, включающего управление ведущим узлом для поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий, измерение угла поворота основного корпуса пылесоса в реальном масштабе времени и сравнение измеренного полного угла поворота с заданным контрольным углом поворота с обеспечением определения, что датчик препятствий вышел из строя, когда полный угол поворота превышает контрольный угол поворота, и, таким образом, прекращения работы ведущего узла.
Этот способ управления может дополнительно включать информирование пользователя об обнаружении выхода из строя датчика препятствий после прекращения работы ведущего узла.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанный аспект и другие характеристики данного изобретения будут более очевидны из подробного описания примерных вариантов его выполнения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает вид в аксонометрии робота-пылесоса в соответствии с примерным вариантом выполнения изобретения;
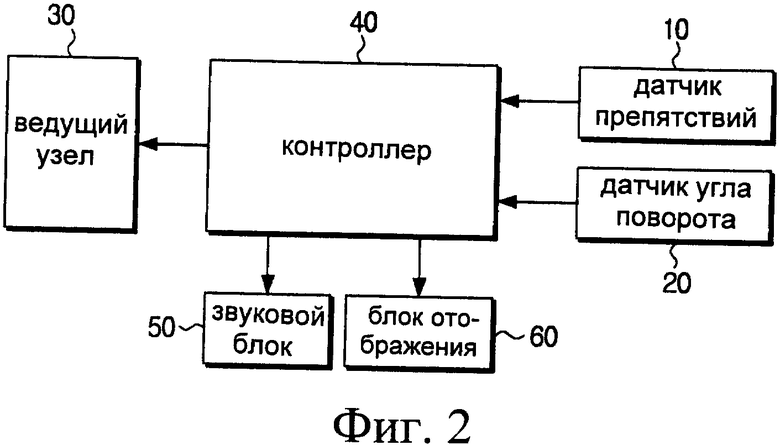
фиг.2 изображает структурную схему, показывающую конструкцию робота-пылесоса в соответствии с примерным вариантом выполнения изобретения; и
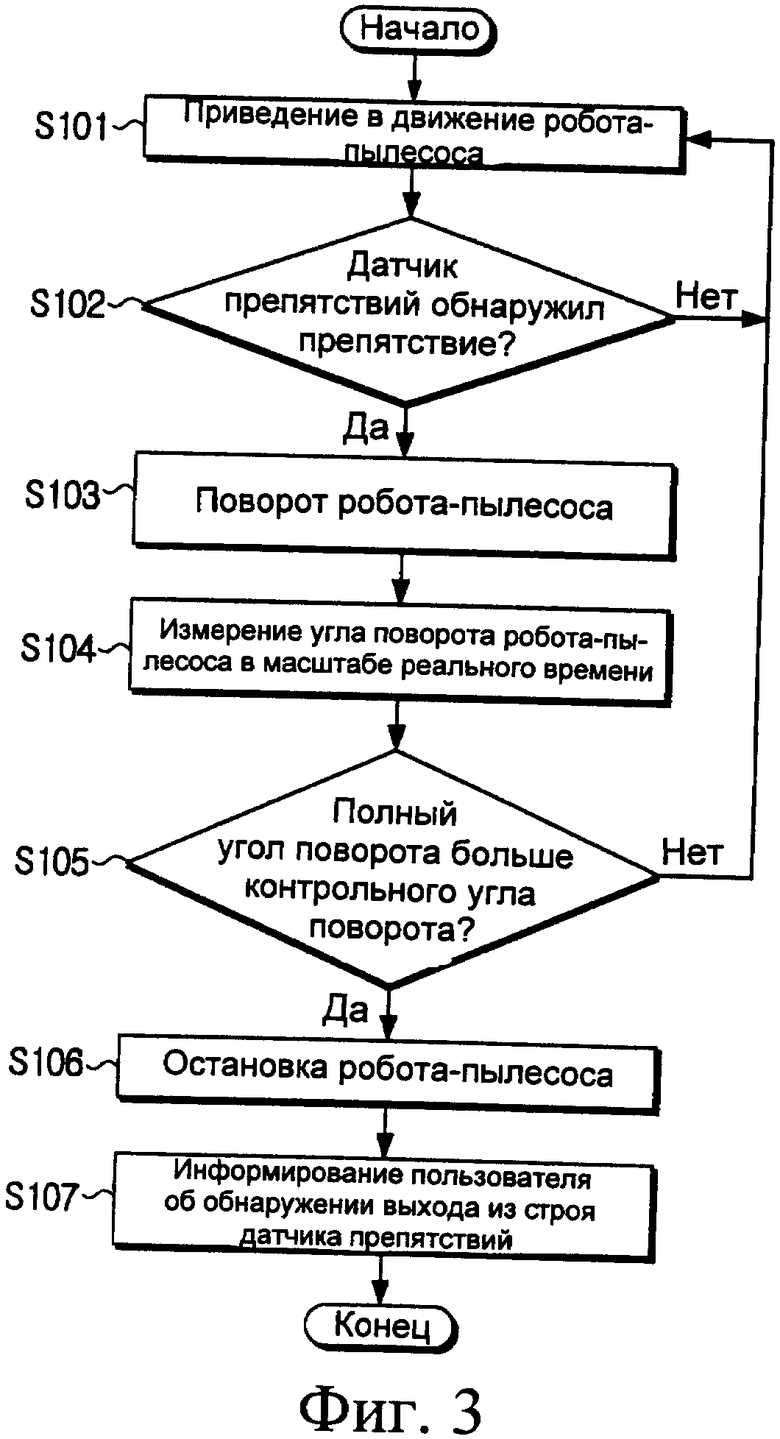
фиг.3 изображает блок-схему последовательности операций, иллюстрирующую способ управления роботом-пылесосом в соответствии с примерным вариантом выполнения изобретения.
Следует понимать, что на данных чертежах одинаковые номера позиций относятся к аналогичным деталям, характеристикам и конструкциям.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже приведено подробное описание робота-пылесоса и способа управления им в соответствии с примерными вариантами выполнения данного изобретения со ссылками на сопроводительные чертежи.
Фиг.1 изображает вид в аксонометрии робота-пылесоса в соответствии с примерным вариантом выполнения данного изобретения, а фиг.2 представляет собой структурную схему, иллюстрирующую конструкцию робота-пылесоса в соответствии с примерным вариантом выполнения данного изобретения.
Как показано на фиг.1 и 2, робот-пылесос в соответствии с примерным вариантом выполнения данного изобретения содержит основной корпус 1, датчик 10 препятствий, датчик 20 угла поворота, ведущий узел 30 и контроллер 40.
Основной корпус 1 пылесоса выполнен приблизительно в форме диска, на верхней части которого имеется полукруглая крышка (не показана). В основном корпусе 1 установлен пылеулавливающий узел (не показан), который улавливает пыль или грязь с очищаемой поверхности.
Датчик 10 установлен на передней поверхности основного корпуса 1 так, что он обращен в направлении продвижения основного корпуса 1, и соединен с контроллером 40 для выдачи ему сигнала обнаружения после обнаружения препятствия, расположенного перед основным корпусом 1 пылесоса. Датчик 10 препятствий содержит излучающий свет узел (не показан), предназначенный для излучения инфракрасного света через светопроницаемое окно (не показано), установленное на передней поверхности основного корпуса 1, и принимающий свет узел (не показан), предназначенный для приема инфракрасного света, отраженного от препятствия после его излучения от излучающего свет узла.
Датчик 20 установлен на передней поверхности основного корпуса 1 с обеспечением измерения угла поворота основного корпуса 1 в реальном масштабе времени и соединен с контроллером 40 для выдачи ему измеренного угла поворота. Датчик 20 относится к типу датчиков углового ускорения и содержит, например, гироскопический датчик.
Ведущий узел 30 содержит колеса 31 и 32, установленные с обеих сторон корпуса 1, для прямолинейного или поворотного перемещения этого корпуса 1.
Для обхода препятствия при его обнаружении датчиком 10, контроллер 40 осуществляет управление узлом 30 для поворота основного корпуса 1. Кроме того, контроллер 40 сравнивает полный угол поворота, измеренный датчиком 20, с заданным контрольным углом поворота, с тем, чтобы определить, что датчик 10 препятствий вышел из строя, когда полный угол поворота превышает контрольный угол поворота, и, таким образом, прекратить работу узла 30. Контрольный угол поворота может быть введен в контроллер 40 заранее во время изготовления или задан непосредственным введением его численного значения в контроллер 40 через внешнюю рабочую клавишу (не показана) пользователем. Предпочтительно, но не обязательно, контрольный угол поворота задается как угол, составляющий по меньшей мере 360°, в частности, по меньшей мере 540°.
В соответствии с другим примерным вариантом выполнения изобретения для информирования пользователя об обнаружении выхода из строя датчика 10 препятствий робот-пылесос дополнительно содержит по меньшей мере один из блоков - звуковой блок 50 и блок 60 отображения, который подсоединен к контроллеру 40. Например, блок 50 может быть динамиком общего типа, а блок 60 может быть обычным монитором с жидкокристаллическим дисплеем (ЖКД).
Ниже со ссылкой на фиг.3 описан способ управления роботом-пылесосом вышеприведенной конструкции в соответствии с примерными вариантами выполнения изобретения. Как проиллюстрировано на фиг.3, во время перемещения (S101) робота-пылесоса при обнаружении препятствия (S102) датчиком 10 препятствий контроллер 40 осуществляет управление узлом 30, так что основной корпус 1 пылесоса выполняет поворот с тем, чтобы обойти препятствие (S103). На данном этапе датчик 20 угла поворота измеряет угол поворота основного корпуса 1 в реальном масштабе времени и выдает измеренный угол поворота контроллеру 40 (S104). Контроллер 40 сравнивает полный угол поворота, измеренный датчиком 20, с контрольным углом поворота, и если полный угол поворота превышает контрольный угол поворота (S105), определяет, что датчик препятствий вышел из строя, прекращая, соответственно, движение робота-пылесоса (S106.) При этом контроллер 40 информирует пользователя об обнаружении выхода из строя датчика 10 посредством звукового блока 50 или/и блока 60 отображения (S107).
Как следует из вышеприведенного описания, в соответствии с примерными вариантами выполнения изобретения робот-пылесос и способ управления этим пылесосом позволяют роботу-пылесосу самостоятельно обнаруживать выход из строя датчика препятствий для прекращения движения и информирования пользователя об обнаружении выхода из строя этого датчика.
Несмотря на то что представленные варианты выполнения данного изобретения показаны и описаны для иллюстрации его принципов, изобретение не ограничивается конкретными примерными вариантами выполнения. Следует понимать, что возможно выполнение различных модификаций и изменений без отклонения от сущности и объема правовой охраны этого изобретения, как изложено в прилагаемой формуле изобретения. Таким образом, предусматривается, что объем правовой охраны данного изобретения включает подобные модификации, изменения и их эквиваленты, которые все подпадают под объем правовой охраны данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ПЫЛЕСОСОМ | 2007 |
|
RU2344747C1 |
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| РОБОТ-ПЫЛЕСОС | 2013 |
|
RU2560319C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ПЫЛЕСОСОМ | 2005 |
|
RU2317766C2 |
| РОБОТ-ПЫЛЕСОС | 2020 |
|
RU2791502C1 |
Робот-пылесос предназначен для улавливания пыли и подобных веществ при перемещении по очищаемой поверхности самостоятельно без управления пользователем. Робот-пылесос содержит датчик препятствий для обнаружения препятствия в направлении продвижения основного корпуса пылесоса, датчик угла поворота для измерения угла поворота основного корпуса пылесоса в масштабе реального времени, ведущий узел для перемещения основного корпуса пылесоса и контроллер для управления ведущим узлом для поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий и для сравнения угла полного поворота, измеренного датчиком угла поворота, с заданным контрольным углом поворота для прекращения работы ведущего узла, когда полный угол поворота превышает контрольный угол поворота. Если полный угол поворота превышает контрольный угол поворота, то контроллер устанавливает, что датчик препятствий вышел из строя. Контрольный угол поворота задается пользователем непосредственным введением численного значения в контроллер. Способ управления роботом-пылесосом предусматривает управление ведущим узлом для поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий, измерение угла поворота основного корпуса пылесоса в реальном масштабе времени и сравнение измеренного полного угла поворота с заданным контрольным углом поворота с обеспечением определения, что датчик препятствий вышел из строя, когда полный угол поворота превышает контрольный угол поворота, и, таким образом, прекращения работы ведущего узла. Технический результат состоит в том, что робот-пылесос может самостоятельно обнаружить выход из строя датчика препятствий для прекращения движения, информировать об этом пользователя и исключить непрерывное вращение корпуса робота-пылесоса до момента полного прекращения его энергоснабжения. 2 н. и 6 з.п. ф-лы, 3 ил.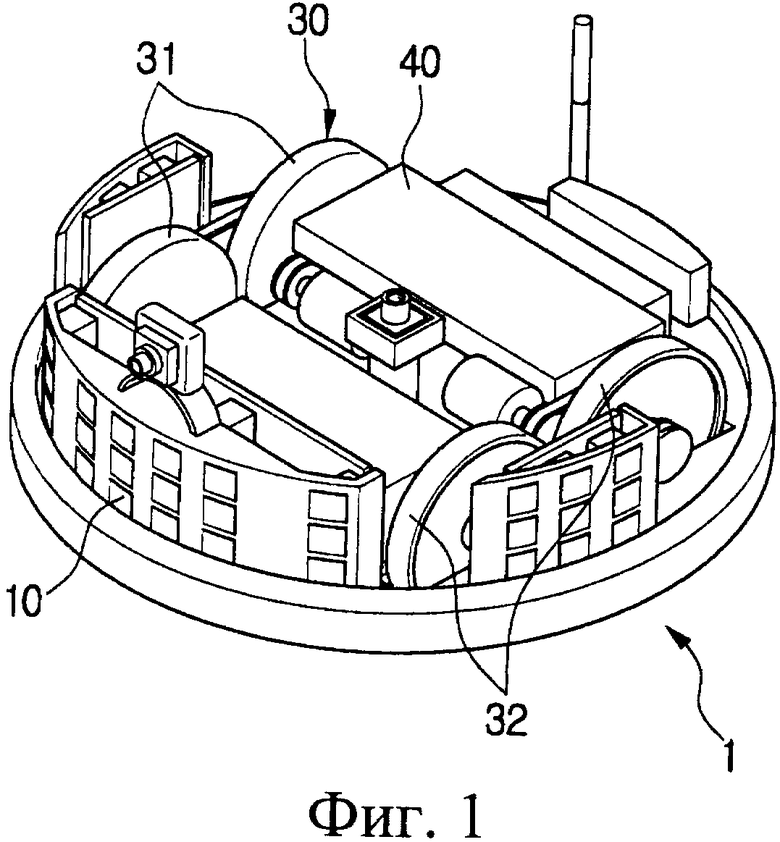
датчик препятствий, предназначенный для обнаружения препятствия в направлении продвижения основного корпуса пылесоса,
датчик угла поворота, предназначенный для измерения угла поворота основного корпуса пылесоса в масштабе реального времени,
ведущий узел, предназначенный для перемещения основного корпуса пылесоса, и
контроллер, предназначенный для управления ведущим узлом для поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий и для сравнения угла полного поворота, измеренного датчиком угла поворота, с заданным контрольным углом поворота для прекращения работы ведущего узла, когда полный угол поворота превышает контрольный угол поворота.
управление ведущим узлом для поворота основного корпуса пылесоса при обнаружении препятствия датчиком препятствий,
измерение угла поворота основного корпуса пылесоса в реальном масштабе времени и
сравнение измеренного полного угла поворота с заданным контрольным углом поворота с обеспечением определения, что датчик препятствий вышел из строя, когда полный угол поворота превышает контрольный угол поворота, и, таким образом, прекращения работы ведущего узла.
| ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ | 2009 |
|
RU2419191C1 |
| Подглазурная краска для фаянса | 1987 |
|
SU1435554A1 |
| KR 102006064862 А, 14.06.2006 | |||
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| Среда для испытаний металлов на питтинговую коррозию | 1987 |
|
SU1441271A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

