ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет данной заявки заявляется по заявке на патент Кореи №10-2006-0118416, поданной 28 ноября 2006 года в Корейское Бюро Интеллектуальной Собственности и включенной целиком в настоящую заявку посредством ссылки.
Данная заявка может быть отнесена к общедоступным, находящимся в процессе рассмотрения патентным заявкам США №10/887930 и 11/288090, поданным, соответственно, 12 июля 2004 года и 29 ноября 2005 года, предмет изобретения каждой из которых включен в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение, в целом, относится к роботу-пылесосу и способу управления им.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В общем случае робот-пылесос втягивает посторонние вещества, например пыль, грязь или тому подобное, во время перемещения по всей очищаемой площади самостоятельно без управления пользователем, автоматически убирая, таким образом, эту площадь.
Вышеописанный робот-пылесос содержит датчики различных типов, установленные внутри него, в частности бамперный датчик. Бамперный датчик установлен на переднем бампере робота-пылесоса и предназначен для обнаружения столкновения с препятствием, находящимся перед роботом-пылесосом. При столкновении робота-пылесоса с препятствием бамперный датчик срабатывает с приведением робота-пылесоса в движение задним ходом на заданное расстояние в направлении, обратном первоначальному направлению перемещения, в результате чего робот-пылесос обходит это препятствие.
Однако при неправильной работе бамперного датчика робот-пылесос терпит неудачу в попытке обойти препятствие и вместо этого совершает непрерывные столкновения с ним. Кроме того, если после столкновения робота-пылесоса с препятствием бамперный датчик не приводится в исходное состояние или не настраивается, а вместо этого поддерживается в режиме обнаружения, то есть во включенном состоянии, робот-пылесос воспринимает непрерывное столкновение с препятствием и, соответственно, повторяет перемещение задним ходом в попытке избежать столкновения с препятствием. Таким образом, если бамперный датчик непрерывно совершает работу и при этом не приводится в исходное состояние или не настраивается, возникает проблема, которая заключается в том, что робот-пылесос многократно совершает движение задним ходом до момента прекращения его энергоснабжения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспектом данного изобретения является устранение по меньшей мере вышеуказанных проблем и/или недостатков и создание по меньшей мере преимуществ, рассмотренных в дальнейшем. Соответственно, аспектом данного изобретения является создание робота-пылесоса и способа управления им с возможностью выявления поломки бамперного датчика и прекращения приведения его в действие, а также информирования пользователя о выявлении поломки бамперного датчика.
Вышеуказанные аспекты данного изобретения достигаются созданием робота-пылесоса, содержащего бамперный датчик, предназначенный для обнаружения столкновения с препятствием, приводной узел, предназначенный для перемещения робота-пылесоса, и контроллер, который предназначен для приведения в действие приводного узла для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием, и для измерения в реальном масштабе времени количества попыток робота-пылесоса повторить перемещение в обратном направлении, и сравнения измеренного количества с заданным контрольным количеством, при этом контроллер прекращает работу приводного узла, когда измеренное количество превышает контрольное количество.
Указанный контроллер может выявлять поломку бамперного датчика, когда измеренное количество превышает контрольное количество.
В соответствии с другим аспектом данного изобретения робот-пылесос дополнительно может содержать по меньшей мере один из блоков - звуковой блок или блок отображения - для того, чтобы информировать пользователя о выявлении поломки бамперного датчика.
Соответственно еще одному аспекту данного изобретения, предложен способ управления роботом-пылесосом, включающий этапы приведения в действие приводного узла для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием, измерения в реальном масштабе времени количества попыток робота-пылесоса повторить перемещение в обратном направлении, сравнения измеренного количества с заданным контрольным количеством и прекращения работы приводного узла, когда измеренное количество превышает контрольное количество.
Данный способ управления может дополнительно включать информирование пользователя о выявлении поломки бамперного датчика после прекращения работы приводного узла.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанный аспект и другие характеристики данного изобретения будут более очевидны из подробного описания иллюстративных вариантов выполнения данного изобретения со ссылкой на прилагаемые чертежи, на которых:
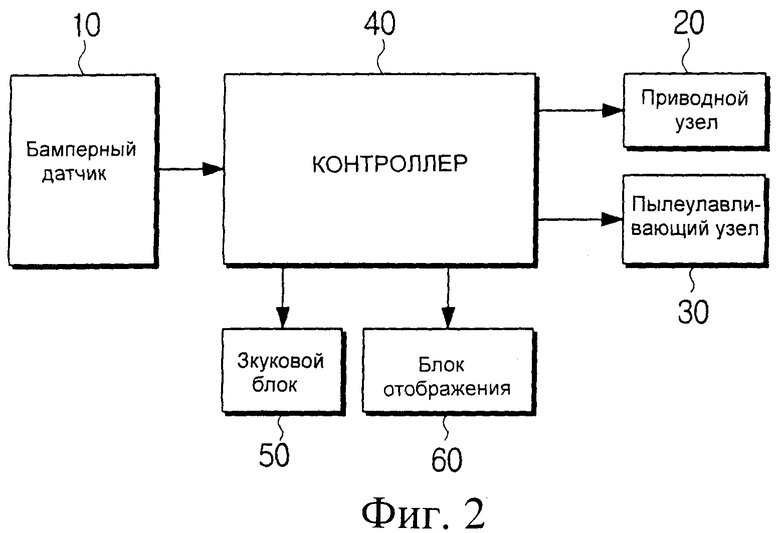
фиг.1 представляет собой покомпонентный аксонометрический вид робота-пылесоса в соответствии с иллюстративным вариантом выполнения данного изобретения;
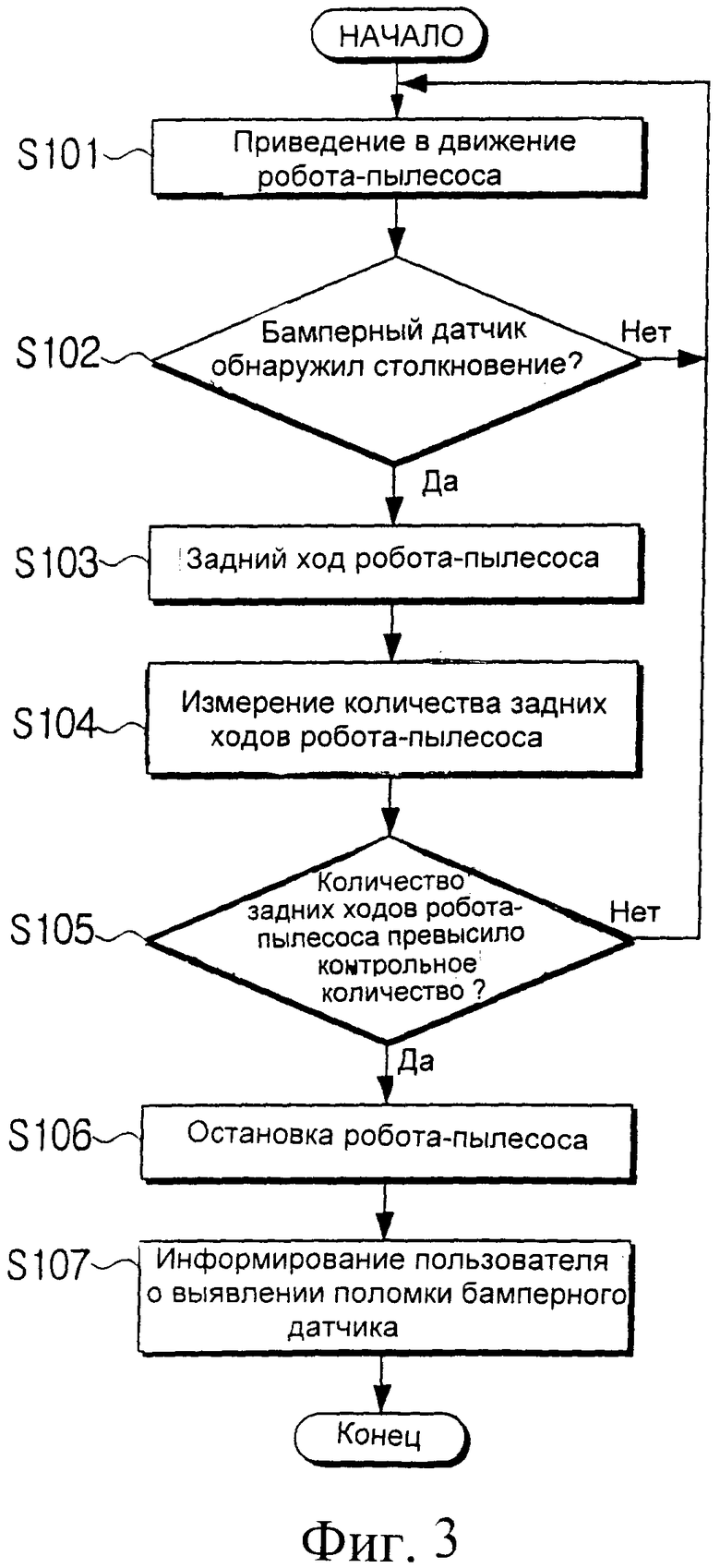
фиг.2 представляет собой структурную схему, иллюстрирующую конструкцию робота-пылесоса, показанного на фиг.1, в соответствии с иллюстративным вариантом выполнения данного изобретения; и
фиг.3 представляет собой блок-схему последовательности операций способа управления роботом-пылесосом в соответствии с иллюстративным вариантом выполнения данного изобретения.
Следует понимать, что одинаковые номера позиций на чертежах относятся к аналогичным деталям, характеристикам и конструкциям.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Ниже приведено подробное описание робота-пылесоса и способа управления им в соответствии с иллюстративными вариантами выполнения данного изобретения со ссылкой на сопроводительные чертежи.
Фиг.1 представляет собой аксонометрический вид робота-пылесоса в соответствии с иллюстративным вариантом выполнения данного изобретения, а фиг.2 представляет собой структурную схему, иллюстрирующую конструкцию робота-пылесоса в соответствии с иллюстративным вариантом выполнения данного изобретения.
Как проиллюстрировано на фиг.1 и 2, робот-пылесос в соответствии с иллюстративным вариантом выполнения данного изобретения выполнен с бамперным датчиком 10, приводным узлом 20, пылеулавливающим узлом 30, расположенным в корпусе робота-пылесоса, и контроллером 40.
Бамперный датчик 10 установлен в переднем бампере 11 робота-пылесоса и соединен с контроллером 40 для выдачи сигнала обнаружения к контроллеру 40 после обнаружения столкновения с препятствием, находящимся перед роботом-пылесосом. Поскольку конструкция бамперного датчика 10 является известной в данной области техники, то для ясности и краткости изложения ее подробное описание опущено.
Приводной узел 20 содержит по меньшей мере колеса 21 и 22, установленные с обеих сторон робота-пылесоса и обеспечивающие прямолинейное или поворотное перемещение робота-пылесоса. Пылеулавливающий узел 30 установлен так, чтобы улавливать пыль или грязь с очищаемой поверхности при перемещении робота-пылесоса по этой поверхности.
Контроллер 40 осуществляет управление узлом 20 для перемещения робота-пылесоса задним ходом на заданное расстояние в направлении, обратном направлению перемещения при рабочем ходе, когда бамперный датчик 10 обнаруживает столкновение с препятствием. Кроме того, контроллер 40 выполняет измерение количества попыток в реальном масштабе времени, которое робот-пылесос повторяет, выполняя задний ход. Контроллер 40 выполняет сравнение суммарного измеренного количества попыток перемещения задним ходом с заданным контрольным количеством для того, чтобы выявить поломку бамперного датчика 10 или его ненадлежащую работу, то есть условие превышения суммарным измеренным количеством попыток перемещения задним ходом контрольного количества, и, соответственно, прекратить работу узла 20. Контрольное количество может быть введено в контроллер 40 заранее во время изготовления или задано непосредственным введением численного значения через внешнюю рабочую клавишу (не показана) пользователем. Предпочтительно, но не обязательно, контрольное количество задается по меньшей мере равным 3.
В соответствии с другим иллюстративным вариантом выполнения данного изобретения для информирования пользователя о выявлении поломки бамперного датчика 10 робот-пылесос дополнительно содержит по меньшей мере один из блоков - звуковой блок 50 или блок 60 отображения, который подсоединен к контроллеру 40, как показано на фиг.2. Например, звуковой блок 50 может быть громкоговорителем общего типа, а блок 60 может быть обычным монитором с жидкокристаллическим дисплеем (ЖКД).
Ниже, со ссылкой на фиг.3, приведено описание способа управления роботом-пылесосом вышеприведенной конструкции в соответствии с иллюстративными вариантами выполнения данного изобретения. Как показано на фиг.3, во время перемещения (S101) робота-пылесоса при столкновении с препятствием (S102) срабатывает и приводится в действие бамперный датчик 10. Когда датчик 10 обнаруживает столкновение с препятствием (S102), контроллер 40 осуществляет управление узлом 20, так что робот-пылесос выполняет перемещение задним ходом на заданное расстояние (S103). Если датчик 10 еще находится во включенном состоянии после выполнения роботом-пылесосом перемещения задним ходом на заданное расстояние, контроллер 40 снова осуществляет управление узлом 20 для перемещения робота-пылесоса задним ходом на заданное расстояние. При этом контроллер 40 измеряет количество попыток робота-пылесоса повторить перемещение задним ходом в реальном масштабе времени (S104) и выполняет сравнение измеренного суммарного количества перемещений задним ходом с заданным контрольным количеством. При условии превышения суммарным количеством перемещений задним ходом контрольного количества (S105), контроллер 40 выявляет поломку бамперного датчика 10 и, соответственно, останавливает робот-пылесос (S106.) При этом контроллер 40 информирует пользователя о выявлении поломки датчика 10 посредством звукового блока 50 или/и блока 60 отображения (S107).
Как следует из вышеприведенного описания, в соответствии с иллюстративными вариантами выполнения данного изобретения, робот-пылесос с данным способом управления может самостоятельно выявлять поломку бамперного датчика для прекращения управления им и информировать пользователя о выявлении поломки бамперного датчика.
Несмотря на то что для иллюстрации принципа данного изобретения были показаны и описаны представленные варианты выполнения данного изобретения, данное изобретение не ограничивается конкретными иллюстративными вариантами выполнения. Следует понимать, что специалистами в данной области техники возможно выполнение различных модификаций и изменений без отклонения от сущности и объема правовой охраны данного изобретения, как изложено в прилагаемой формуле изобретения. Таким образом, предусматривается, что объем правовой охраны данного изобретения включает подобные модификации и изменения, а также их эквиваленты, которые подпадают под объем правовой охраны данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ПЫЛЕСОСОМ | 2007 |
|
RU2342898C1 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС | 2004 |
|
RU2271923C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ (ВАРИАНТЫ) | 2007 |
|
RU2357644C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |
Робот-пылесос предназначен для автоматической очистки поверхности во время его перемещения по ней самостоятельно без управления пользователем. Робот-пылесос содержит бамперный датчик для обнаружения столкновения с препятствием, приводной узел для перемещения робота-пылесоса в направлении перемещения при рабочем ходе и контроллер, который приводит в движение приводной узел для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению его перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием, и который измеряет количество попыток робота-пылесоса повторить перемещение в обратном направлении в реальном масштабе времени и сравнивает измеренное количество с заданным контрольным количеством. Контроллер прекращает работу приводного узла, когда измеренное количество превышает контрольное количество. Контроллер подсоединен к звуковому блоку и блоку отображения и приводит в действие по меньшей мере один из них при превышении измеренным количеством указанного контрольного количества. Способ управления роботом-пылесосом включает приведение в движение приводного узла робота-пылесоса в направлении перемещения при рабочем ходе по очищаемой поверхности, приведение в движение приводного узла для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием, измерение количества попыток робота-пылесоса повторить перемещение в обратном направлении от препятствия в реальном масштабе времени, сравнение измеренного количества с заданным контрольным количеством и прекращение работы приводного узла, когда измеренное количество превышает контрольное количество. Технический результат состоит в обеспечении возможности выявления поломки бамперного датчика и прекращения его функционирования и информирования пользователя о такой поломке. 2 н. и 9 з.п. ф-лы, 3 ил.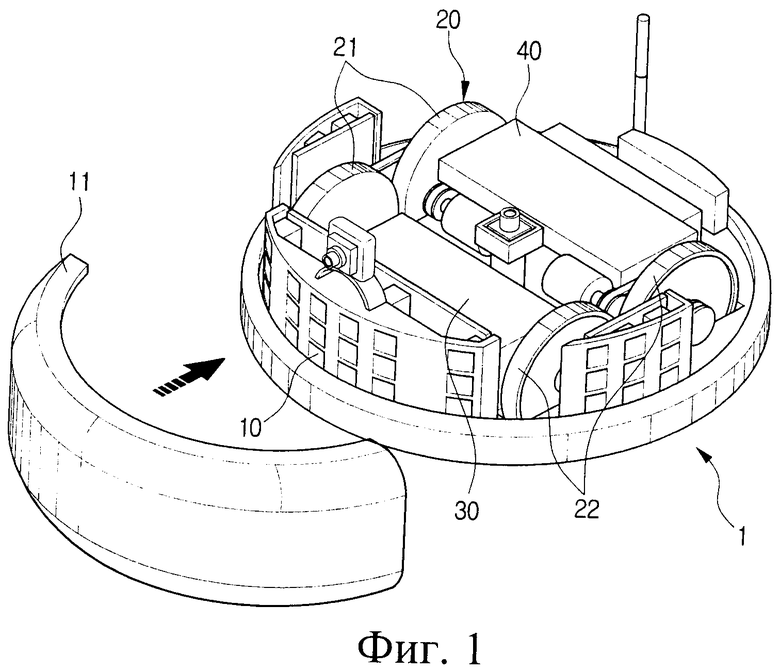
бамперный датчик, предназначенный для обнаружения столкновения с препятствием,
приводной узел, предназначенный для перемещения робота-пылесоса в направлении перемещения при рабочем ходе,
и контроллер, который приводит в движение приводной узел для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению его перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием, и который измеряет количество попыток робота-пылесоса повторить перемещение в обратном направлении в реальном масштабе времени и сравнивает измеренное количество с заданным контрольным количеством, при этом контроллер прекращает работу приводного узла, когда измеренное количество превышает контрольное количество.
приведение в движение приводного узла робота-пылесоса в направлении перемещения при рабочем ходе по очищаемой поверхности,
приведение в движение приводного узла для перемещения робота-пылесоса на заданное расстояние в направлении, обратном направлению перемещения при рабочем ходе, когда бамперный датчик обнаруживает столкновение с препятствием,
измерение количества попыток робота-пылесоса повторить перемещение в обратном направлении от препятствия в реальном масштабе времени,
сравнение измеренного количества с заданным контрольным количеством и
прекращение работы приводного узла, когда измеренное количество превышает контрольное количество.
| KR 20040062041 A, 07.07.2004 | |||
| РОБОТ-ПЫЛЕСОС | 2004 |
|
RU2271923C1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| DE 10351767 A1, 26.08.2004 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПЫЛЕСОСОМ | 1998 |
|
RU2152160C1 |

