Настоящее изобретение относится к технологиям динамического уплотнения грунта. Эти технологии используют для улучшения структурных характеристик грунта, в частности, перед строительными работами.
Обработка при динамическом уплотнении повышает плотность грунта до большой глубины посредством волн очень высокой энергии. Она включает использование больших грузов, обычно от 10 до 100 тонн, падающих с высоты в основном 10-40 метров. Расположение точек удара на грунте и других параметров обработки (значений энергии, фазы, периодов отсутствия воздействия) зависит от характеристик обрабатываемой почвы и, возможно, от результатов измерений, полученных в зоне испытаний. Эти параметры определяют заранее на основе требуемых характеристик грунта.
Такую обработку грунта обычно используют для фундаментов зданий или для получения больших стабилизированных площадей в насыпях или разрыхленной почве.
Можно выделить следующие два общих типа способов динамического уплотнения грунта:
1) Способ с протяжкой тросов.
Канатные ковшовые экскаваторы, используемые для выемки грунта, часто оборудуют лебедками, имеющими средство захвата, обеспечивающее так называемую функцию "свободного падения". Такое устройство можно использовать для динамического уплотнения грунта посредством прикрепления уплотнительного груза к одному или более тросам лебедки. После включения лебедки и подъема груза на требуемую высоту захват открывают и груз падает так, что он тянет трос с барабана лебедки за собой. После удара лебедки тормозят для остановки их вращения, тросы снова наматывают и возобновляют новый цикл.
Недостаток вышеуказанного способа состоит в том, что при использовании доступных на рынке устройств, применяемых для гражданского строительства, наблюдается, что энергия, передаваемая в грунт при ударе, составляет только 50-60% потенциальной энергии, накапливаемой при подъеме груза. Такая низкая эффективность получается в результате потерь на трение и инерции тросов и лебедок. Такой способ можно применять только посредством использования одного троса на лебедку (без увеличения усилия лебедки) и одного слоя троса на барабане лебедки. На практике это ограничивает высоту падения до приблизительно 25 м и вес уплотняющего груза до приблизительно 25 тонн. В соответствии с этим энергия одного удара составляет по большей части, 60%×25000×9,81×25≈3700 кДж.
2) Способ свободного падения
Для устранения плохой эффективности при падении описанному выше способу возможно использовать подъемное устройство, оборудованное соединительным устройством, которое можно разъединять под нагрузкой и которое расположено между уплотнительным грузом и тросами. Такое соединительное устройство может быть типа крюка, такого как используют для буксировки. Оно также может представлять собой специально разработанный гидравлический зажим. Уплотнительный груз поднимают на требуемую высоту, где лебедки останавливают, и затем крюк или зажим отпускает груз, который действительно свободно падает.
Основное преимущество этого способа состоит в его высокой эффективности, поскольку энергия удара равна потенциальной энергии, полученной в результате подъема. Кроме того, при этом возможно использовать системы блоков для умножения тягового усилия, прикладываемого лебедками. Также можно использовать более чем один слой троса на барабане лебедки. Энергия удара в принципе ограничивается стабильностью подъемного устройства под нагрузкой.
Однако этот способ также имеет ряд недостатков. Когда разъединяют соединительное средство, энергия упругой деформации, накопленная в устройстве и в тросах при подъеме груза, внезапно передается на соединительное устройство в основном под действием реакции тросов. Подвижные части, составляющие соединительное устройство и, возможно, системы блоков, испытывают толчок вверх с существенной энергией. Они также могут испытывать удар, направленный в сторону из-за несимметричности системы. Такая реакция может вызвать различные проблемы, такие как сход тросов с направляющих, удары о конструкцию крана и т.д. Это явление необходимо компенсировать либо посредством увеличения веса подвижных частей приблизительно до 20% от веса освобождаемого груза, что ухудшает общую эффективность, или с использованием внешней обвязки для ограничения движения соединительного устройства.
Кроме того, опускание соединительного устройства для повторного соединения с грузом на грунте занимает существенное время, поскольку зависит от скоростных возможностей лебедок без нагрузки, которые обычно низкие. В лучшем случае можно ожидать, что время опускания составляет тот же порядок, что и время подъема. Поэтому выполнение этого второго способа занимает относительно большое время.
Задача настоящего изобретения состоит в устранении описанных выше недостатков предшествующего уровня техники.
Таким образом, в изобретении задача решена посредством способа уплотнения грунта, в котором:
- соединяют, по меньшей мере, один трос с грузом, лежащим на грунте, посредством разъемного средства соединения;
- прикладывают тяговое усилие к тросу для подъема груза до требуемой высоты;
- уменьшают указанное тяговое усилие для начала движения вниз груза, за которым следует трос;
- разъединяют средство соединения при движении груза вниз.
Подъем выполняют посредством одной или нескольких лебедок типа системы со "свободным падением" (как и в способах предшествующего уровня техники, с протягиванием тросов), возможно, с использованием блоков для умножения усилия лебедки. Уплотняющий груз подвешивают на нижнем блоке или непосредственно на тросе лебедки через средство разъемного соединения, например, типа крюка или зажима. Средство соединения открывают после того, как будет достигнута определенная скорость движения вниз, в результате чего соединительная часть, которая остается закрепленной на тросе, не испытывает рывок вверх. Это предотвращает повреждение конструкции и не требует использования внешних систем обвязки. Кроме того, скорость при движении вниз средства соединения и троса во время освобождения груза уменьшает время, необходимое для перевода средства соединения обратно в положение груза, после того, как он упадет на землю.
Также настоящее изобретение относится к устройству для уплотнения грунта, содержащему стрелу крана, средство лебедки, по меньшей мере, один трос, протянутый от средства лебедки, вокруг шкива отклонения, установленного на вершине стрелы крана, разъемное средство соединения для соединения троса с грузом и средство управления для включения средства лебедки для подъема груза от земли до требуемой высоты, уменьшения силы тяги, прикладываемой средством лебедки для инициирования движения вниз груза, за которым следует трос, и высвобождения средства соединения во время движения груза вниз.
Настоящее изобретение поясняется чертежами, на которых представлено:
фиг.1-4 - виды сбоку устройства для динамического уплотнения грунта на разных этапах осуществления способа в соответствии с изобретением;
фиг.5 - пример разъемного средства соединения, используемого в таком устройстве.
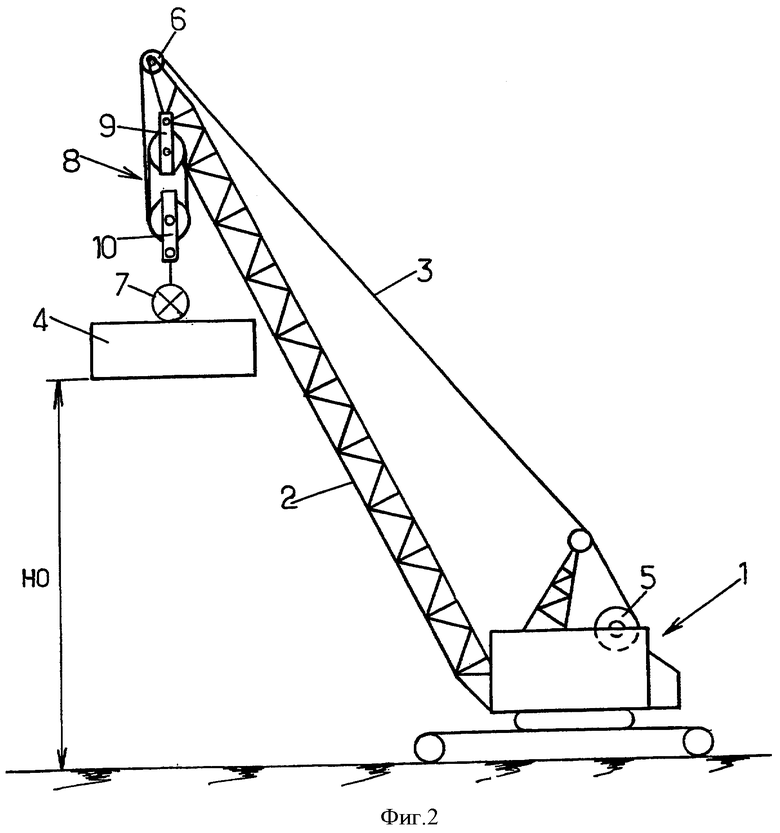
Устройство для уплотнения грунта, показанное на фиг.1-4, имеет конструкцию 1 транспортного средства, на которой установлена стрела 2 крана. Один или более тросов 3 используют для подъема тяжелого груза 4 (>10 тонн) от уровня грунта до заданного уровня сброса Н0 (>10 м). Каждый подъемный трос 3 наматывают на барабан лебедки 5, установленный на структуре 1, и отклоняют посредством шкива 6, установленного на вершине стрелы 2 крана.
Разъемное соединительное устройство 7, схематично показанное на фиг.1-4, расположено между подъемным тросом (тросами) 3 и уплотняющим грузом 4.
В варианте выполнения, представленном на фиг.1-4, устройство дополнительно содержит систему 8 блоков, через которую подъемный трос 3 протягивают между шкивом 6 отклонения и разъемным устройством 7 соединения. Такая система 8 может содержать верхний блок 9 шкивов, установленный рядом с вершиной стрелы 2 крана, и нижний блок 10 шкивов, рама которого соединена с устройством 7 соединения. Трос 3 установлен на шкивах блоков 9, 10 для умножения подъемного усилия, прикладываемого лебедкой 5.
В других предпочтительных вариантах выполнения изобретения подъемный трос 3 может быть непосредственно закреплен на разъемном устройстве 7 соединения.
Пример варианта выполнения разъемного устройства соединения представлен на фиг.5. В этом варианте выполнения на верхней поверхности уплотняющего груза выполнено гнездо 12, предназначенное для установки в него гидравлического зажима 13. Гнездо 12 имеет широкое центральное отверстие с верхним коническим участком, который расширяется наружу в направлении к верхней поверхности для центровки зажима 13 при его опускании, для правильной установки его внутри гнезда. В нижней части гнезда 12 его центральное отверстие расширяется, образуя выемку 14, в которую можно устанавливать зажим 13.
Зажим 13 снабжен скобой 15, предназначенной для соединения с блоком 10 нижнего шкива системы 8 блоков (или непосредственно с тросом 3). Множество кулачковых элементов 16 сочленены на нижней части скобы 15. Эти кулачковые элементы 16 установлены симметрично вокруг вертикальной оси. В их нижней части они имеют коническую внешнюю форму, которая соответствует выемке 14, выполненной в гнезде 12. Каждую пару расположенных противоположно кулачковых элементов 16 приводят в действие посредством гидравлического домкрата 17 через рычажный механизм. Этот механизм содержит пару штоков 18, каждый из которых сочленен на его внешнем конце с одним из кулачковых элементов 16 вокруг горизонтальной оси. Два штока 18 также сочленены вместе вокруг горизонтальной оси, которая пересекает вертикальную ось симметрии устройства 7. Домкрат 17 расположен вертикально. При его выдвижении точка сочленения между двумя штоками 18 опускается, в результате чего кулачковые элементы 16 раздвигаются друг от друга в положение зажима, в котором они прижимаются к гнезду 12 внутри выемки 14. Когда домкрат 17 втягивают, точка сочленения между двумя штоками 18 поднимается, сводя кулачковые элементы 16 ближе друг к другу для разъединения соединения, в результате чего зажим 13 и гнездо 12 разъединяются друг от друга.
Домкрат 17 разъемного зажима 13 приводят в действие посредством блока управления (не показан) для получения рабочей последовательности, описанной ниже, совместно с лебедкой 5.
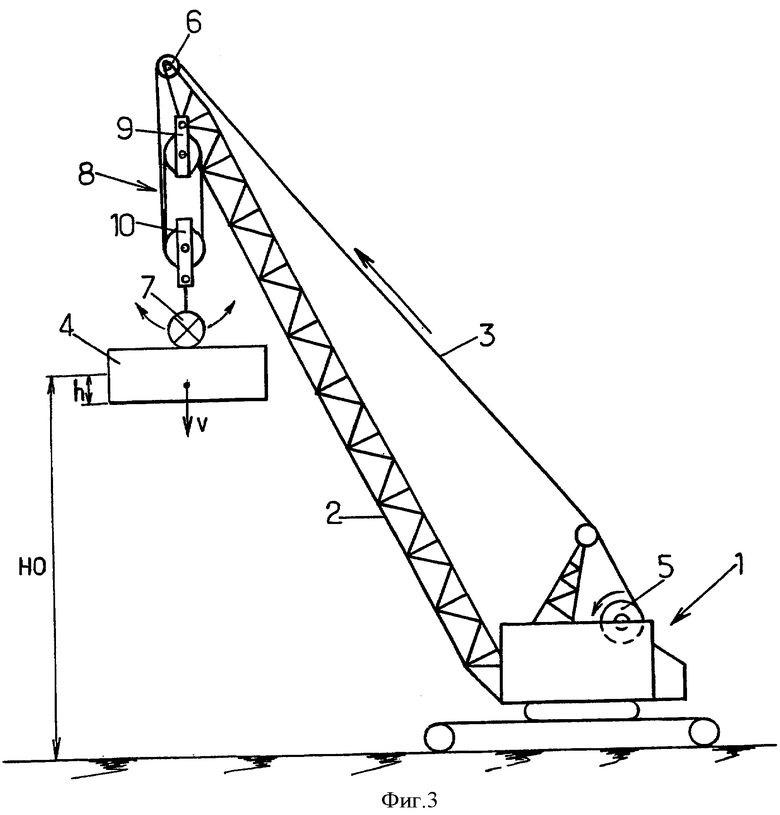
После определения структуры ударов о грунт и последовательности ударов устройство и груз 4 устанавливают в первом положении. Зажим 13 опускают и управляют им таким образом, чтобы зацепить груз 4, уложенный на грунте, как показано на фиг.1. Лебедку 5 затем включают для подъема груза 4 до заданной высоты Н0, как показано на фиг.2.
В этот момент накапливается существенная потенциальная энергия, М×g×Н0, где М представляет собой вес груза 4. В идеале 100% потенциальной энергии было бы передано в грунт при падении груза. Кроме того, в положении, показанном на фиг.2, в подъемном тросе 3 и в конструкции устройства накапливается существенная энергия упругой деформации, в частности, в стреле 2 крана.
Движение вниз груза из положения, показанного на фиг.2, выполняют с применением двух фаз.
Во время первой фазы лебедкой 5 управляют таким образом, что позволяют ее барабану разматываться, и при этом зажим 13 еще не открыт. Это устраняет или существенно уменьшает тяговое усилие, прикладываемое лебедкой 5. Первую фазу выполняют до тех пор, пока груз 4 не достигнет определенной скорости v при движении вниз, как показано на фиг.3. В этот момент начинают вторую фазу посредством разъединения зажима 13, что позволяет грузу 4 свободно падать на грунт.
Поскольку груз 4 и зажим 13 уже имеет определенную скорость v при раскрытии зажима, зажим 13 и нижняя часть 10 системы 8 блоков не испытывают толчок, направленный вверх, в результате внезапного высвобождения энергии упругой деформации, накопленной в тросе 3 и в стреле 2 крана. Это исключает недостатки известных способов свободного падения предшествующего уровня техники.
На второй фазе вращение барабана 5 лебедки тормозят посредством соответствующего средства сцепления (не показано) для управления направленной вниз скоростью v' соединительного устройства 7 во время его опускания к грузу 4. Это обеспечивает возможность регулировать время, необходимое для повторного соединения зажима 13 с грузом 4, и таким образом оптимизировать время цикла.
После повторного соединения зажима 13 можно выполнять следующий цикл в том же положении на грунте или после перемещения устройства и груза в боковом направлении.
Существуют различные способы определения блоком управления момента, в который зажим 13 необходимо раскрыть после начала движения груза вниз.
В простом варианте выполнения устройство 7 соединения раскрывают (например, при втягивании гидравлического устройства 17, показанного на фиг.5) в заданный момент времени t, после того как барабан 5 лебедки начнет разматываться.
В качестве альтернативы на устройстве соединения может быть установлен датчик положения. Устройство 7 соединения затем раскрывают, после того как оно переместится вниз на определенное расстояние h (или, что эквивалентно, когда оно достигнет высоты H0-h).
В другом варианте на устройстве 7 соединения установлен датчик скорости, который отслеживает скорость падения груза на первой фазе. Условие высвобождения при этом возникает, когда измеряемая скорость падения достигает заданного порогового значения v, при этом домкрат 17 втягивают в соответствии с детектированием этого условия блоком управления.
Типичные величины указанных выше пороговых значений составляют t≈0,5 с, h≈1 м, v≈4 м/с. Поскольку высота Н0 подъема обычно больше чем 10 метров (например, Н0=25 м), можно видеть, что уплотняющий груз 4 потеряет не более чем несколько процентов своей потенциальной энергии на первой фазе цикла, на которой также получают определенную направленную вниз скорость v. Поэтому общая энергия, передаваемая в грунт во время удара, будет очень близка к исходной потенциальной энергии. Это означает, что эффективность способа весьма высокая, инерция лебедки и конструкции будет проявляться только на короткой первой фазе.
Такая высокая эффективность достигается без риска повреждения конструкции в результате рывка вверх зажима 13, троса и блока 10 шкивов при сбросе груза 4, при относительно малом времени цикла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для возбуждения в грунте поперечных сейсмических волн | 1975 |
|
SU1175364A3 |
| Раздвижная пожарно-спасательная система | 2019 |
|
RU2700735C1 |
| БУРОВОЕ УСТРОЙСТВО И СПОСОБ БУРЕНИЯ | 2002 |
|
RU2240418C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Устройство для возбуждения сейсмических волн | 1975 |
|
SU556395A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 1992 |
|
RU2040018C1 |
| Свайный копер | 1935 |
|
SU47941A1 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО | 2009 |
|
RU2406681C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА КРЮКА КРАНА И ГРУЗА | 1990 |
|
RU2034771C1 |

По меньшей мере, один трос (3) закреплен на грузе (4), который лежит на грунте, через разъемное средство (7) соединения. Тяговое усилие прикладывают к тросу для подъема груза до заданной высоты. Тяговое усилие затем отключают или уменьшают для начала движения вниз груза, за которым следует трос. Средство соединения затем высвобождают во время движения груза вниз. 2 н и 7 з.п. ф-лы, 5 ил.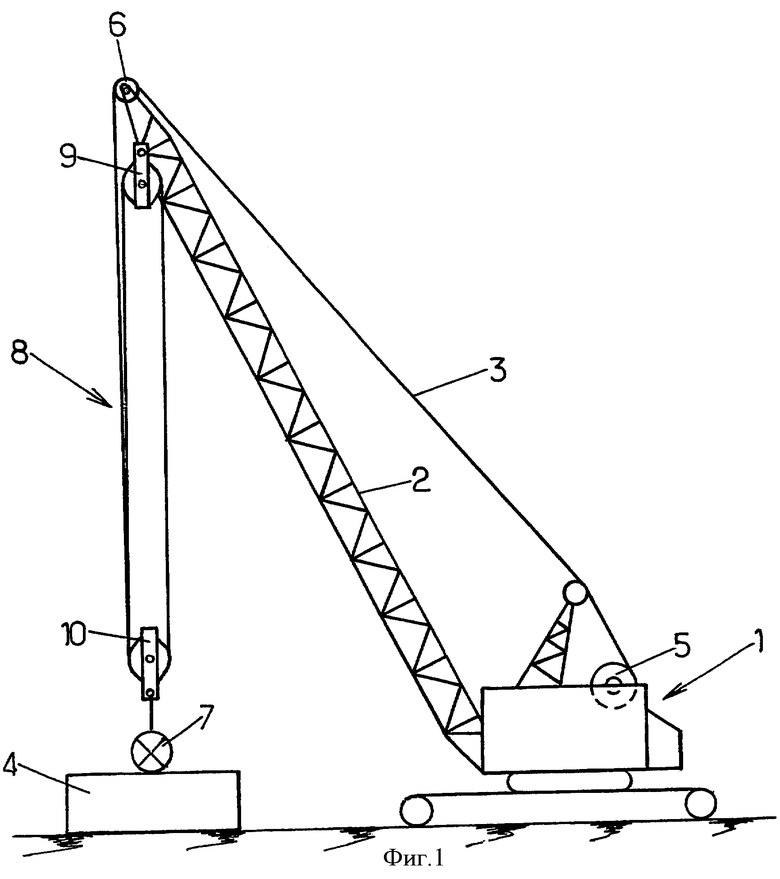
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1634758A1 |
| Устройство для вытрамбовывания котлованов | 1985 |
|
SU1293274A1 |
| Троакар | 1984 |
|
SU1232236A1 |
| JP 59145816 A, 21.08.1984 | |||
| JP 53089216 A, 05.08.1978. | |||

