Изобретение относится к области металлорежущего оборудования и, в частности, к контролю точности металлорежущих станков.
Наиболее близким по технической сущности является способ автоматического управления точностью токарного станка (см.патент РФ №2131802, B23Q15/007, опуб. 20.06.1999), включающий измерение отклонения от цилиндричности обрабатываемой детали в двухкоординатной системе в зависимости от угла поворота шпинделя станка посредством двух бесконтактных датчиков линейных перемещений, которые располагают под углом 90° с возможностью взаимодействия с прецизионной линейкой, и датчика угла поворота шпинделя, построение по полученным данным при помощи компьютера геометрического образа детали и определение регламентированных показателей точности металлорежущих станков. К недостаткам известного технического решения следует отнести отсутствие выявления причин возникновения погрешностей формы детали, а также использование большого количества датчиков.
Решаемой задачей является контроль точности станка по расширенному кругу регламентированных показателей.
Технический результат - определение тех узлов станка, которые являются источниками возникновения погрешностей формы детали.
Этот технический результат достигается тем, что в способе определения точности металлорежущих станков, включающем измерение отклонения от цилиндричности обрабатываемой детали в двухкоординатной системе в зависимости от угла поворота шпинделя станка посредством двух бесконтактных датчиков линейных перемещений, которые располагают под углом 90° с возможностью взаимодействия с прецизионной линейкой, и датчика угла поворота шпинделя, построение по полученным данным при помощи компьютера геометрического образа детали и определение регламентированной точности металлорежущих станков, после построения геометрического образа детали осуществляют гармонический анализ ее поперечного и продольного сечений с определением амплитуд максимальных гармоник, по указанным значениям определяют регламентированные показатели точности металлорежущего станка, по которым выявляют те узлы, которые вносят наибольшие погрешности в форму обработанной детали.
Признаки, отличающие предложенный способ от прототипа, являются новыми и существенными, так как позволяют наиболее просто и полно определить состояние металлорежущего станка по нормам точности.
На фиг.1 изображена схема расположения элементов при осуществлении способа. На чертеже приняты следующие обозначения:
1 - металлорежущий станок;
2 - шпиндель;
3 - деталь;
4 - суппорт;
5 - державка;
6 - датчики линейного перемещения;
7 - усилитель сигналов (контроллер);
8 - компьютер;
9 - прецизионная линейка.
Способ осуществляется на металлорежущем станке 1, в шпинделе 2 которого закрепляют обрабатываемую деталь 3. На резцедержателе суппорта 4 закрепляют державку 5, в которой установлены два датчика линейных перемещений 6. Сигналы от датчиков 6 и датчика угла поворота шпинделя (не показан) поступают на усилитель 7, а затем в компьютер 8. Датчики 6 взаимодействуют с прецизионной линейкой 9. С задним концом шпинделя 2 соединяется датчик угла поворота шпинделя.
В процессе обработки детали 3 на металлорежущем станке 1 датчики линейного перемещения 6 фиксируют положение вершины резца, а датчик угла поворота - угловое положение шпинделя. После поступления сигналов от датчиков в компьютер 8 происходит их обработка и построение геометрического образа детали.
Построение геометрического образа детали производится по следующей формуле:

где RДЕТ - радиус-вектор, описывающий геометрический образ;
хр, ур - исходные координаты вершины резца;
х' р, у' р - смещения вершины резца, определяемые по показаниям датчиков 6.
На фиг.2 изображен геометрический образ детали в трехмерном пространстве.
После построения геометрического образа детали проводится гармонический анализ профилей продольного и поперечного сечений. С учетом гармоник, полученных в процессе анализа, геометрический образ детали в полярной системе координат представляется в следующем виде:
где k - номер гармоники;
А0 - среднее значение геометрического образа детали;
Аk - амплитуда k-ой гармоники;
х - угол поворота шпинделя;
ϕk - фазовый угол k-ой гармоники.
По значениям амплитуд Аk определяются величины регламентированных показателей точности. По величине регламентированных показателей делается вывод о соответствии металлорежущего станка по нормам точности.
Пример конкретного выполнения предложенного способа
Узлы металлорежущего станка, которые вносят погрешности в форму обработанной детали, характеризуются показателями точности. Эти показатели нормируются соответствующими ГОСТами на нормы точности металлорежущих станков.
Рассмотрим контроль точности токарно-револьверного станка 1ЕЗ16А повышенной точности на примере определения одного из показателей точности. Определим радиальное биение наружной центрирующей поверхности шпинделя, которое нормируется по ГОСТ 17-70.
В патроне шпинделя 2 токарного станка 1 устанавливают обрабатываемую деталь 3, которая имеет диаметр d=60 мм, длину l=70 мм, точность изготовления IT=6 квалитет, материал - сталь Ст40.
Обрабатывают цилиндрическую поверхность детали 3 на длину 40 мм. В процессе обработки сигналы от датчиков линейных перемещений и угла поворота считываются и поступают в компьютер.
Компьютерная программа по полученным от датчиков данным строит геометрический образ детали и проводит гармонический анализ поперечного и продольного сечений детали.
Построение геометрического образа детали производится в полярной системе координат по формуле:

где хр=d/2-tH=28 мм, tH = 2 мм - настраиваемая глубина резания.
Для определения радиального биения наружной центрирующей поверхности шпинделя достаточно проведение гармонического анализа поперечного сечения детали. В результате гармонического анализа форма поперечного сечения детали представляется в виде набора гармоник, синусоид с различными частотами в следующем виде:

где n - количество гармоник, синусоид.
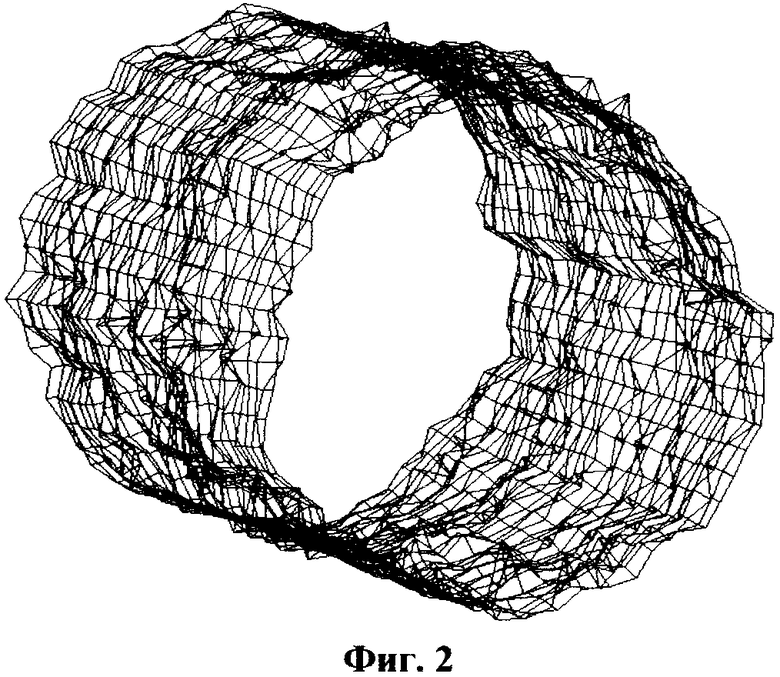
Определяются коэффициенты ak и bk по формулам:
где N=q·g=45·60=2700 - суммарное количество измерений;
q=45 - количество оборотов шпинделя в процессе обработки детали;
g=60 - количество измерений сигналов на один оборот шпинделя станка;
k=1...30 - порядковые номера гармоник;
RДЕТi - значения радиус-вектора, описывающего геометрический образ, в каждой точке наружной поверхности детали 3;
хi - значения угла радиус-вектора профиля поперечного сечения в полярной системе координат (угол поворота шпинделя).
На фиг.3 изображена диаграмма коэффициентов аk и bk.
Определяется коэффициент A0, характеризующий средний цилиндр наружной поверхности детали 3, по формуле:
Определяется форма поперечного сечения детали в следующем виде:
Определяются амплитуды Аk и фазовые углы ϕ по формулам:
На фиг.4 изображена диаграмма амплитуд Аk гармоник профиля поперечного сечения.
Максимальные амплитуды Аk характеризуют те узлы станка, которые вносят наибольшие погрешности в форму обработанной детали. Известно, что радиальное биение наружной центрирующей поверхности шпинделя в процессе обработки отображается на форме обработанной детали в виде смещенной от оси вращения шпинделя окружности. Эта окружность характеризуется параметрами гармоники 1: амплитудой А1 и фазовым углом ϕ1.
Фазовые углы ϕk характеризуют взаимное расположение синусоид.
В результате проведенных расчетов получили следующие значения параметров гармоники 1, характеризующие радиальное биение наружной центрирующей поверхности шпинделя:
А1=0.000578 мм, ϕ1=198 град.
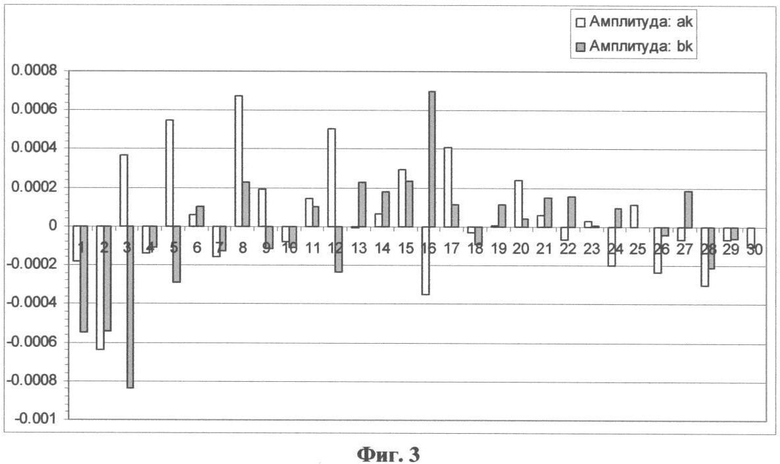
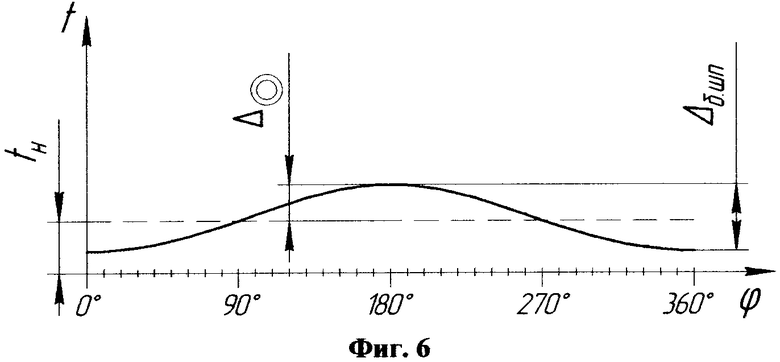
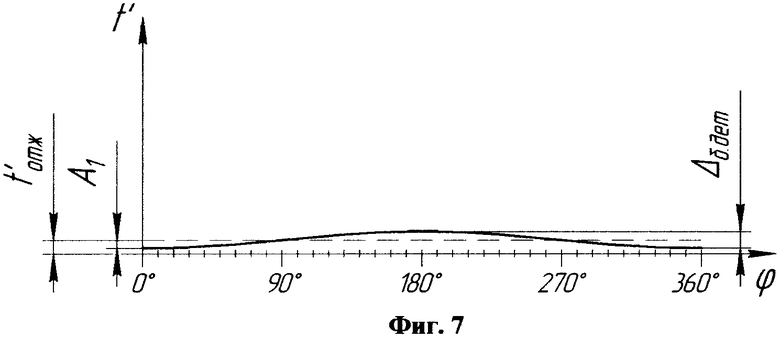
На фиг.5,6,7 изображена схема определения радиального биения шпинделя, которая поясняет взаимосвязь радиального биения шпинделя с амплитудой А1 гармоники 1. На фиг.5 приняты следующие обозначения:
2 - шпиндель;
4 - суппорт;
10-резец;
11 - припуск, снимаемый с детали в процессе обработки;
12 - припуск t', который не сняли с детали из-за отжима суппорта 4 под влиянием составляющей силы резания Ру.
В процессе механической обработки, под влиянием составляющей силы резания Ру (фиг.5), происходит отжим суппорта в направлении действия этой силы. Отжим суппорта зависит от его жесткости j, нормируемой по ГОСТ 17-70:
j=10·P1/δ=10•400/0.22=18182 Н/мм,
где Р1=400 кг - сила, которая действует на суппорт;
δ=0.22 мм - смещение суппорта под действием силы Р1.
В результате отжима суппорта происходит копирование погрешности радиального биения шпинделя на форму обработанной детали. Копирование погрешности возникает из-за колебаний составляющей силы резания Ру под влиянием переменной глубины резания t и отражается на форме обработанной детали в виде припуска t', который не сняли с детали из-за отжима суппорта.
При радиальном биении шпинделя глубина резания t определяется по формуле:
где  - отклонение от соосности оси вращения вала шпинделя и оси наружной центрирующей поверхности шпинделя;
- отклонение от соосности оси вращения вала шпинделя и оси наружной центрирующей поверхности шпинделя;
ϕ - угол поворота шпинделя.
Составляющая силы резания Ру определяется по формуле (Режимы резания металлов: Справочник / Под ред. Ю.В.Барановского. - М: Машиностроение, 1972 г.):
Ру=10Ср .tx.Sy.Vn.Кр=10.125.t1.10,75.135°.0.84=1050.t
где S=1 мм/об - подача;
V=135 м/мин - скорость резания;
Ср=125,у=0.75, n=0, Кр=0.84 - коэффициенты, которые учитывают обрабатываемый материал Ст40, материал режущей части резца Т15К6, радиус при вершине резца 1 мм и углы резца: в плане 60°, передний 15°, угол наклона главного лезвия 0°;
х=1 - коэффициент при глубине резания t, округленный с 0.9 до 1 для удобства расчетов.
Припуск t' определяется исходя из жесткости суппорта по формуле:

Следовательно, отклонение от соосности определяется по амплитуде А1 гармоники 1 по формуле:

Определяется радиальное биение наружной центрирующей поверхности шпинделя Δ6шт по формуле:

Выводится заключение о величине контролируемого параметра. По ГОСТ 17-70 величина радиального биения наружной центрирующей поверхности шпинделя не должна превышать 7 мкм. Таким образом, расчетная величина 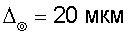 превышает норму в 3 раза.
превышает норму в 3 раза.
Остальные амплитуды гармоник характеризуют те погрешности станка, которые отражаются на форме обработанной детали в виде овальности - амплитуда А2 (гармоника 2), огранки с различным количеством вершин - амплитуды А3...А30.
Гармоники высоких порядков n>20 характеризуют кинематические погрешности станка.
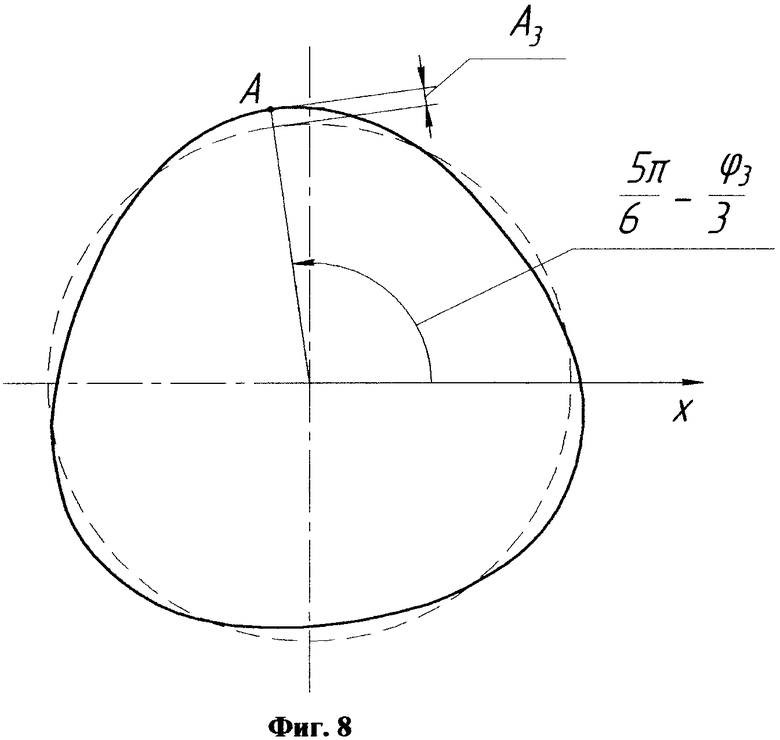
На фиг.8 изображена огранка наружной поверхности детали, которая характеризуется параметрами гармоники 3: амплитудой А3=0.000914 и фазовым углом ϕ3=156 град.
Способ позволяет определить те узлы станка, которые являются источниками возникновения погрешностей формы детали, а следовательно, получать детали с более высокими показателями точности. Способ может быть использован для токарных, шлифовальных, фрезерных станков.

Изобретение относится к машиностроению и может быть применено для определения точности металлорежущих станков. В процессе обработки детали на станке датчики перемещения фиксируют положение вершины резца в пространстве в зависимости от угла поворота шпинделя, который определяется датчиком угла поворота. Данные о положении вершины резца и угла поворота шпинделя поступают в компьютер, где происходит их запись и обработка. Разработанная программа позволяет обработать полученные сигналы и построить геометрический образ детали в трехмерном пространстве. С помощью метода гармонического анализа по профилям продольного и поперечного сечений определяют регламентированные показатели точности станка. Обеспечивается контроль точности станка по нескольким регламентированным показателям. 8 ил.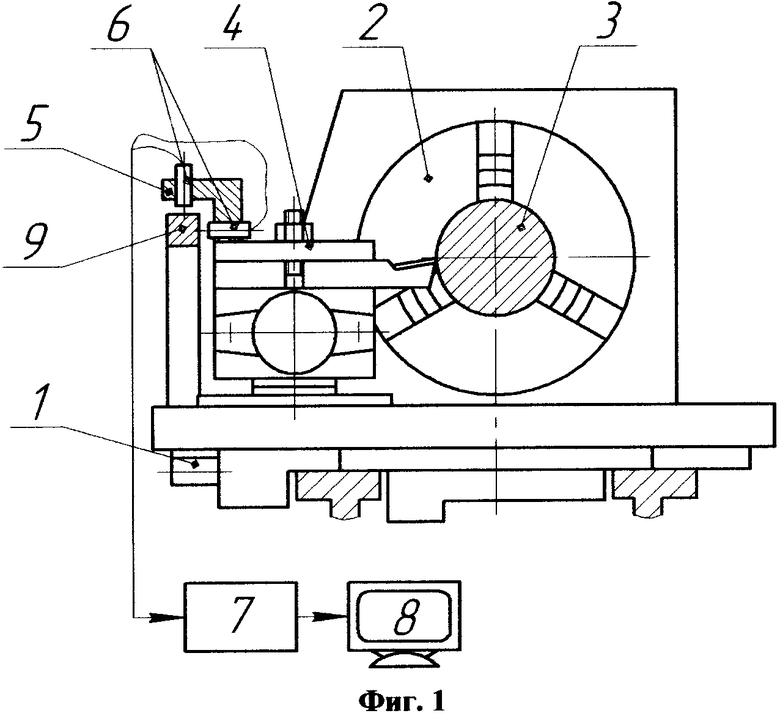
Способ определения точности металлорежущих станков, включающий измерение отклонения от цилиндричности обрабатываемой детали в двухкоординатной системе в зависимости от угла поворота шпинделя станка посредством двух бесконтактных датчиков линейных перемещений, которые располагают под углом 90° с возможностью взаимодействия с прецизионной линейкой, и датчика угла поворота шпинделя, построение по полученным данным при помощи компьютера геометрического образа детали и определение регламентированных показателей точности металлорежущих станков, отличающийся тем, что после построения геометрического образа обрабатываемой детали осуществляют гармонический анализ ее поперечного и продольного сечений с определением значений амплитуд максимальных гармоник, по указанным значениям определяют регламентированные показатели точности металлорежущего станка, по которым выявляют те узлы, которые вносят наибольшие погрешности в форму обработанной детали.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОЧНОСТЬЮ ТОКАРНОГО СТАНКА | 1998 |
|
RU2131802C1 |
| СПОСОБ ДИАГНОСТИКИ ШПИНДЕЛЬНОГО УЗЛА | 1996 |
|
RU2124966C1 |
| US 4031368, 21.06.1977. | |||

