Изобретение относится к авиационной технике и может быть использовано в спортивных и развлекательных целях.
Общеизвестны махолеты, начиная с конструкции, разработанной Леонардо да Винчи, аппараты тяжелее воздуха, поддерживаемые в воздухе с помощью подвижных крыльев.
Известен механический летательный аппарат [Патент РФ 2014247, МКИ B 64 C 33/00, опубл. 15.06.94, Бюл. 11], включающий фюзеляж, крылья, хвостовую часть и шасси. Движения жесткого крыла обеспечиваются за счет силовой установки, включающей гидроцилиндры привода машущих движений и аккумуляторы инерционных сил. Установка снабжена дополнительными турбинами для работы на взлетно-посадочных режимах. Крыло может совершать как машущие движения, так и поворачиваться в горизонтальной плоскости. Конструкция сложна и имеет значительный вес. Выполнение деталей в виде жестких полых элементов делает аппарат ненадежным, так как резкопеременные нагрузки могут привести к разрушению, в том числе резонансному.
Известен дельтаплан с машущими крыльями [Патент США 5170965, МКИ B 64 C 31/04, опубл. 15.12.92], принятый за прототип. Аппарат содержит несущий остов, выполненный в виде рамы, состоящей из взаимно перпендикулярных балок, связанных стяжками. На раме закреплены крылья, хвостовая часть оперения и шасси. Крыло включает подпружиненный к раме лонжерон, на котором закреплена обшивка, растянутая на массивных латах. В процессе полета пилот воздействует ногами на педали, соединенные гибкой тягой с лонжероном. Гибкая тяга через натяжные ролики соединена с рамой и обеспечивает машущие движения крыла, возврат которого осуществляется посредством соответствующей пружины.
Конструкция прототипа достаточно громоздка, обладает плохими аэродинамическими характеристиками, что делает невозможным осуществление полета под воздействием мускульной силы ног. Выполнение педалей в виде коленвала исключает возможность быстрого реагирования при изменении аэродинамических воздействий на крыло, что снижает и без того невысокую эффективность летательного аппарата. Попадание в противофазу направления движения (инерционного, вследствие парусности и веса) крыла и воздействие тяги может привести к остановке движения и в конечном итоге к поломке крыла.
В основу изобретения поставлена задача создания надежной конструкции летательного аппарата, обладающей тяговыми характеристиками, достаточными для полета человека, а именно конструкция должна обладать одновременно достаточной мощностью и системой управления, позволяющей адекватно и быстро реагировать пилоту на изменения внешнего воздействия на крыло и соответственно изменять частоту и амплитуду его колебаний. При этом аэродинамические характеристики крыла должны также изменяться в зависимости от изменения ситуации.
Поставленная задача решается тем, что летательный аппарат, содержащий остов с шарнирно установленными крыльями, включающими нежесткую обшивку и латы, консольно закрепленные на лонжероне, соединенном с гибкой тягой, установленной на натяжных роликах с обеспечением возможности поворота лонжерона в вертикальной плоскости, согласно изобретению новым является то, что он снабжен пневмосистемой, состоящей из пневмоцилиндра с поршнем, баллона со сжатым газом, соединенного магистралями с обеими камерами пневмоцилиндра, и закрепленным на гибкой тяге блоком управления давлением в камерах пневмоцилиндра, соединенным с рычагом ручного управления крыльями, шток поршня связан с гибкой тягой, соединенной в кольцо, натяжные ролики установлены на остове по обе стороны от места соединения штока с гибкой тягой, крыло выполнено по форме треугольника, а латы выполнены из гибкого материала, причем жесткость каждой латы, расположенной дальше от остова, меньше жесткости предыдущей.
Изобретение иллюстрируется чертежами, на которых представлено:
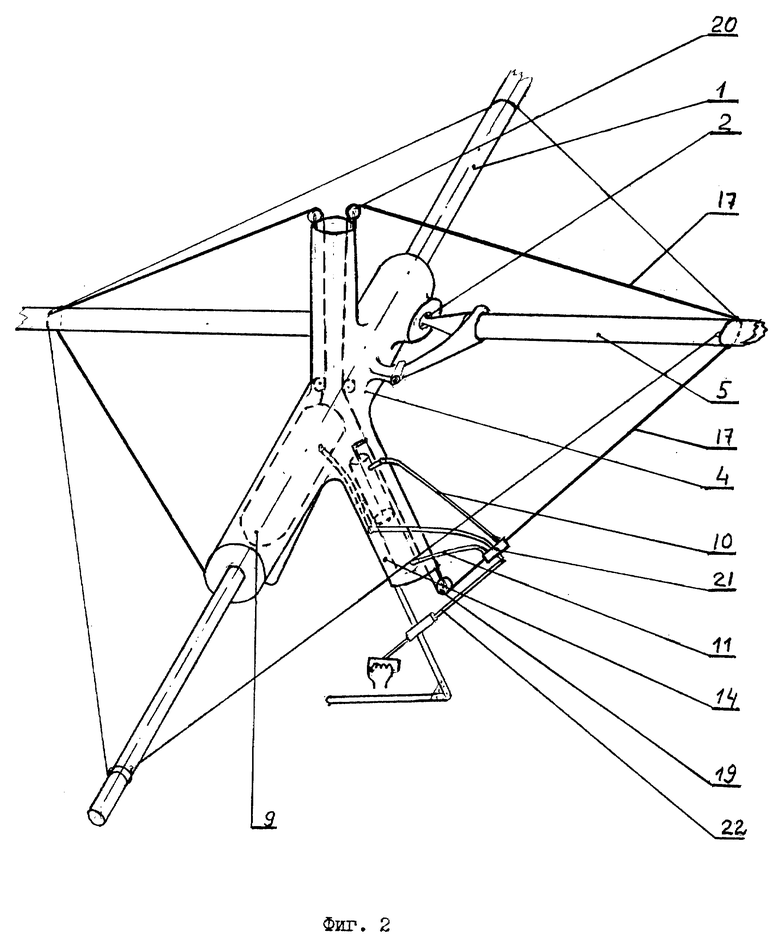
фиг.1 - внешний вид летательного аппарата,
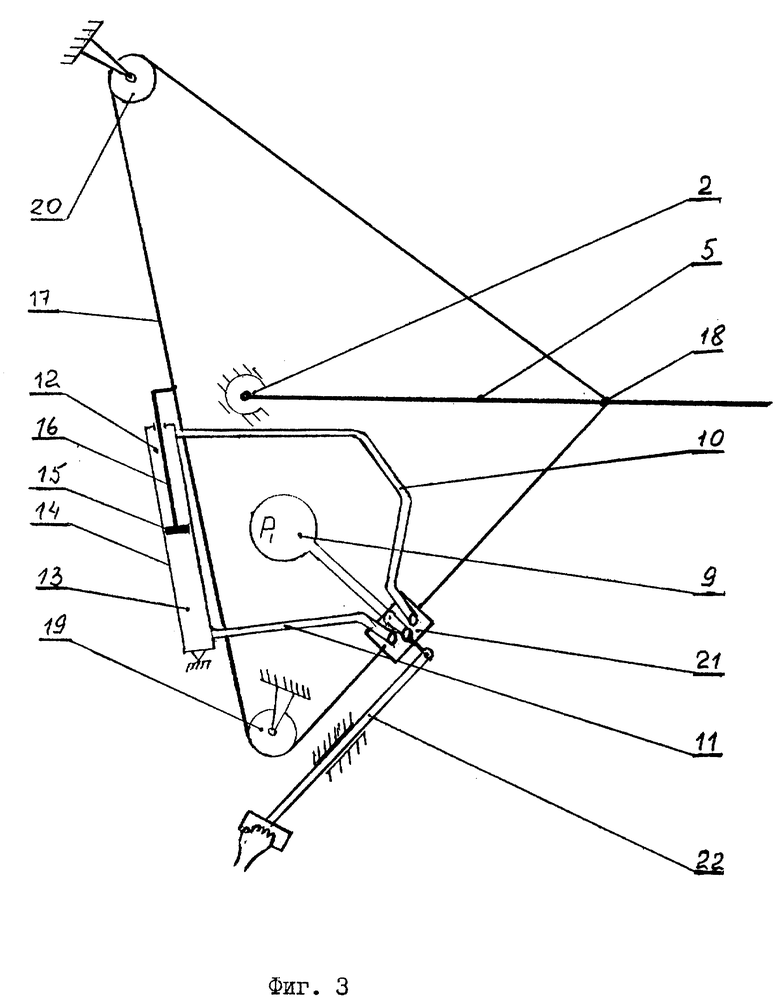
фиг.2 - конструкция остова,
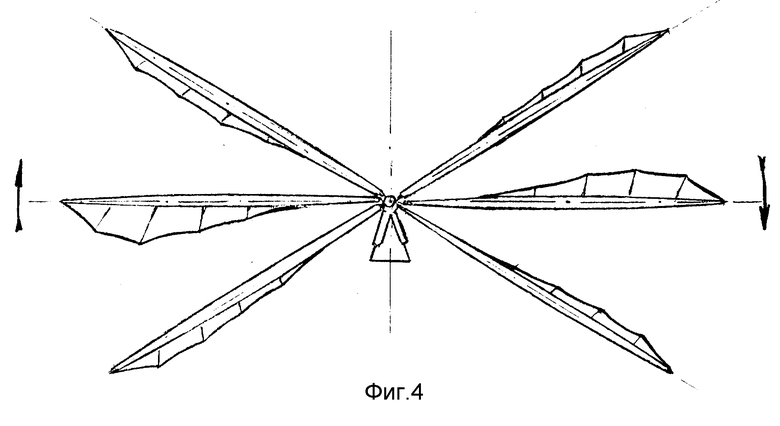
фиг.3 - кинематическая схема крыла,
фиг.4 - фазы движения крыла.
Летательный аппарат включает остов 1, на котором с помощью шарнира 2 закреплено крыло 3. На остове 1 коаксиально закреплен корпус пневмосистемы 4. Крыло 2 имеет парусную форму и включает лонжерон 5, на котором консольно закреплены латы 6, служащие для натяжения обшивки 7. Треугольную форму крыла 2 обеспечивает натяжная балка 8, идущая от серединной части лонжерона 5 в сторону задней части остова в противолежащий угол крыла 3.
Пневмосистема 4 представляет собой размещенный в цилиндрическом корпусе (установленном коаксиально остову) баллон 9 со сжатым газом, соединенный магистралями 10 и 11 с камерами 12 и 13 цилиндра 14, на которые последний разделен поршнем 15. Шток 16 поршня 15 соединен с бесконечной (соединенной в кольцо) гибкой тягой 17, которая неподвижно закреплена на лонжероне 5 в точке 18 и проходит через натяжные ролики 19 и 20.
На гибкой тяге 17 (на ветви, проходящей под крылом) неподвижно закреплен блок 21 управления давлением в камерах 12 и 13, который соединен с рычагом 22 ручного управления крыльями. Блок 21 может иметь различное исполнение. На фиг.3 он представлен в виде рычажного переключателя, заслонка которого попеременно открывает и закрывает магистрали 10 и 11, изменяя направление движения газового потока и тем самым регулирующая давление в камерах. Баллон 9 может быть заряжен сжатым (сжиженным) газом, а также может являться паровым котлом, подогреваемым от внешнего источника.
Аппарат работает следующим образом.
В полете пилот находится в специальной люльке (на чертеже не показана) и держится руками за рычаги 22 ручного управления крыльями, воздействуя на блок 21 управления давлением в камерах пневмоцилиндра. При движении рычага 22 вниз открывается магистраль 11 и в камеру 13 из баллона 9 поступает газ под давлением. Поршень начинает движение вверх и, следовательно, его шток 16 перемещает гибкую тягу 17 по часовой стрелке. При этом лонжерон 5, закрепленный на тяге в точке 18 (а следовательно крыло), начинает поворачиваться вниз вокруг шарнира 2. Нежесткая обшивка крыла под воздействием потоков начинает изгибаться. Вследствие того, что к концу крыла снижается жесткость лат и увеличивается линейная скорость движения (махового) и степень воздействия воздушного потока на различные участки обшивки, то под воздействием этих факторов латы изгибаются неравномерно, что приводит к закручиванию крыла. У крыла временно появляются свойства винта с образованием толкающей силы. Та часть крыла, которая примыкает к остову, имеет меньшую амплитуду движения, не подвергается такому изгибу и обеспечивает постоянную подъемную силу аппарата.
При подходе к нижней точке пилот ощущает это через рычаг 22 управления и начинает движение рычага управления вверх. Блок управления 21 переключает направление движения газа в магистралях, в камере 13 происходит стравливание давления (механизм на чертеже не показан), а в камере 12 давление повышается. Гибкая тяга 17 начинает поворачиваться против часовой стрелки, увлекая крыло вверх. Под действием упругих сил крыло принимает исходное (незакрученное) положение. Аппарат под действием инерционных сил продолжает движение вперед, подъемная сила действует на все крыло, затем конец крыла начинает закручиваться в обратную сторону, что опять придает аппарату дополнительную толкающую силу.
Шарнир 2 выполнен таким образом, что исключает возможность поворота лонжерона вокруг своей оси.
Быстрый (по сравнению с опусканием) подъем крыльев позволяет не потерять высоту. При движении вниз угол атаки крыла максимален и, следовательно, максимальна подъемная сила. При движении вверх угол атаки уменьшается, движение аппарата осуществляется по инерции и необходимо обеспечить скорейший возврат крыла в верхнее положение. Ручное управление позволяет управлять каждым взмахом и регулировать скорость подъема и опускания крыла. Кроме того, такое управление позволяет быстро отслеживать изменение скорости воздушных потоков, направление их движения, порывы ветра и быстро на них реагировать. При этом управление движением каждого крыла осуществляется независимо друг от друга, что также очень важно при изменении обстановки.
Все вышеизложенное, кроме основных преимуществ, позволяет максимально экономить энергозатраты.
Таким образом, заявляемое изобретение позволяет решить существующее техническое противоречие. Известные летательные аппараты с жесткими машущими крыльями, содержащие дополнительные двигатели и привод, не могут обеспечить оперативное управление движением крыльев, адекватное обстановке и условиям и, следовательно, не достигают желаемого результата. С другой стороны, летательные аппараты, использующие только мускульную силу, не могут поддерживать полет вследствие малой мощности. Заявляемое изобретение использует преимущества ручного управления (оперативная реакция пилота, постоянно отслеживающего и анализирующего ситуацию) и преимущества дополнительной энергии пневмосистемы, которая многократно усиливает воздействие на крыло мышечной силы пилота.
Совокупность признаков, характеризующих конструкцию крыла, его кинематику, конструкцию пневмосистемы, связь с управлением, позволяет решить поставленную задачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРНИТОПТЕР | 2002 |
|
RU2270136C2 |
| ДЕЛЬТАМАХОЛЕТ | 2004 |
|
RU2263610C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ИСПОЛЬЗОВАНИЕМ МАШУЩИХ КРЫЛЬЕВ ("СТРЕКОЗА") | 2008 |
|
RU2375253C1 |
Изобретение относится к авиации и может быть использовано в спортивных и развлекательных целях. Летательный аппарат содержит остов, шарнирно установленные на нем крылья, состоящие из лонжерона, лат и обшивки, пневмосистему. Лонжерон соединен с гибкой тягой, установленной на натяжных роликах. Крыло выполнено по форме треугольника. Латы выполнены из гибкого материала, при этом жесткость каждой латы, расположенной дальше от остова, меньше жесткости предыдущей. Пневмосистема состоит из пневмоцилиндра с поршнем, баллона со сжатым газом и блока управления давлением. Баллон соединен магистралями с обеими камерами пневмоцилиндра. Блок управления давлением закреплен на гибкой тяге и соединен с рычагом ручного управления крыльями. Шток поршня связан с гибкой тягой, соединенной в кольцо. Натяжные ролики установлены на остове по обе стороны от места соединения штока с гибкой тягой. Система управления летательным аппаратом позволяет быстро реагировать на изменения внешнего воздействия на крыло, усиливает воздействие на крыло мышечной силы пилота. 4 ил.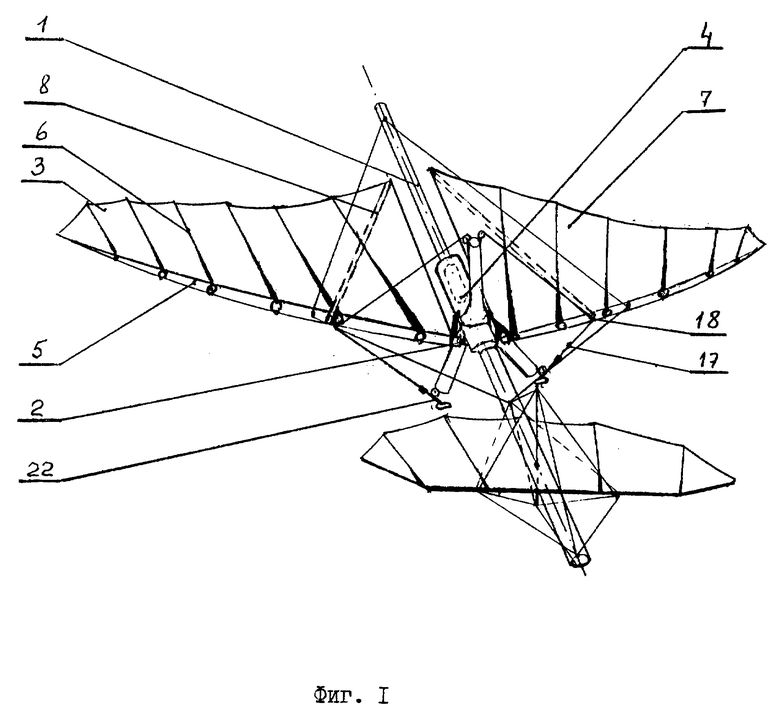
Летательный аппарат, содержащий остов с шарнирно установленными крыльями, включающими нежесткую обшивку и латы, консольно закрепленные на лонжероне, соединенном с гибкой тягой, установленной на натяжных роликах с обеспечением возможности поворота лонжерона в вертикальной плоскости, отличающийся тем, что он снабжен пневмосистемой, состоящей из пневмоцилиндра с поршнем, баллона со сжатым газом, соединенного магистралями с обеими камерами пневмоцилиндра, и закрепленным на гибкой тяге блоком управления давлением в камерах пневмоцилиндра, соединенным с рычагом ручного управления крыльями, шток поршня связан с гибкой тягой, соединенной в кольцо, натяжные ролики установлены на остове по обе стороны от места соединения штока с гибкой тягой, крыло выполнено по форме треугольника, а латы выполнены из гибкого материала, причем жесткость каждой латы, расположенной дальше от остова, меньше жесткости предыдущей.
| US 5170965 A, 15.12.92 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ВАГОНА | 2011 |
|
RU2464186C1 |
| МАХОЛЕТ | 1991 |
|
RU2007338C1 |
