Изобретение относится к электроизмерительной технике и может быть использовано в системах дистанционного управления перемещением подвижного объекта (груза) с помощью грузоподъемных кранов.
Известно устройство для измерения угла наклона каната грузоподъемного крана (патент РФ №55967), содержащее корпус, внутри которого установлены датчики угла наклона каната в двух взаимно перпендикулярных плоскостях, соединенную с корпусом обойму, через которую пропущен канат, и средство для подвески корпуса к несущей конструкции грузоподъемного крана, внутри корпуса установлен маятник, включающий вертикальную штангу, узел подвески одного из концов штанги к верхней части корпуса и закрепленное на другом конце штанги тело маятника, каждый из указанных датчиков имеет бесконтактный чувствительный элемент, а на средней части вертикальной штанги закреплены элементы, взаимодействующие с чувствительными элементами датчиков.
Недостатком данного устройства является существенная погрешность измерения углов наклона канатов при сдвоенном полиспасте, поскольку данное устройство не учитывает поворот грузовой подвески вокруг ее вертикальной оси.
Наиболее близким по своей технической сущности и достигаемому техническому эффекту к предлагаемому изобретению является устройство для измерения угла наклона каната грузоподъемной машины (патент РФ №2346879), содержащее корпус, внутри которого установлен один датчик углового положения или два датчика углового положения в двух взаимно перпендикулярных плоскостях, и обойму, прикрепленную к корпусу или выполненную с корпусом за одно целое, через которую пропущен канат, средство для подвески корпуса к грузоподъемной машине, и электронную схему обработки выходных сигналов датчиков, соединенную, по меньшей мере, с одним датчиком углового положения, а также датчик длины или натяжения средства для подвески корпуса к грузоподъемной машине, выполненный с возможностью формирования дискретного выходного сигнала при уменьшении длины или ослаблении натяжения этого средства, или датчик приближения подвижной обоймы полиспаста, выход которого подключен к дополнительному входу электронной схемы обработки выходных сигналов датчиков.
Недостатками данного устройства являются низкая точность измерения углов наклона каната при сдвоенном полиспасте и недостаточные функциональные возможности, ограничивающие применение данного устройства в системах дистанционного управления перемещением подвижного объекта с помощью грузоподъемного крана.
Задачей изобретения является повышение точности измерения углов наклона канатов при сдвоенном полиспасте и расширение функциональных возможностей устройства.
Технический результат изобретения заключается в:
- обеспечении измерения углов наклона канатов в двух плоскостях и определение результирующей величины угла наклона каната в системе координат, связанной с грузоподъемным краном;
- повышении точности измерения углов наклона канатов в двух взаимно перпендикулярных плоскостях при сдвоенном полиспасте и возможном повороте грузовой подвески вокруг ее вертикальной оси;
- повышении точности определения результирующей величины угла наклона канатов при сдвоенном полиспасте и возможном повороте грузовой подвески вокруг ее вертикальной оси;
- обеспечении определения угла поворота грузовой подвески вокруг ее вертикальной оси;
- определении длины средства для подвески груза при сдвоенном полиспасте и возможном повороте грузовой подвески вокруг ее вертикальной оси.
Технический результат достигается с помощью устройства для измерения углов наклона канатов при сдвоенном полиспасте, содержащем первый и второй датчики углового положения в двух взаимно перпендикулярных плоскостях, электронную схему обработки выходных сигналов датчиков, выход которой связан с системой дистанционного управления перемещением подвижного объекта, третий и четвертый датчики углового положения в двух взаимно перпендикулярных плоскостях и датчик длины каната, причем входы первого и второго датчиков углового положения механически соединены с первым канатом, входы третьего и четвертого датчиков углового положения механически соединены со вторым канатом, вход датчика длины каната механически связан с любым из канатов, а выходы всех датчиков углового положения и датчика длины каната соединены с входами электронной схемы обработки выходных сигналов датчиков.
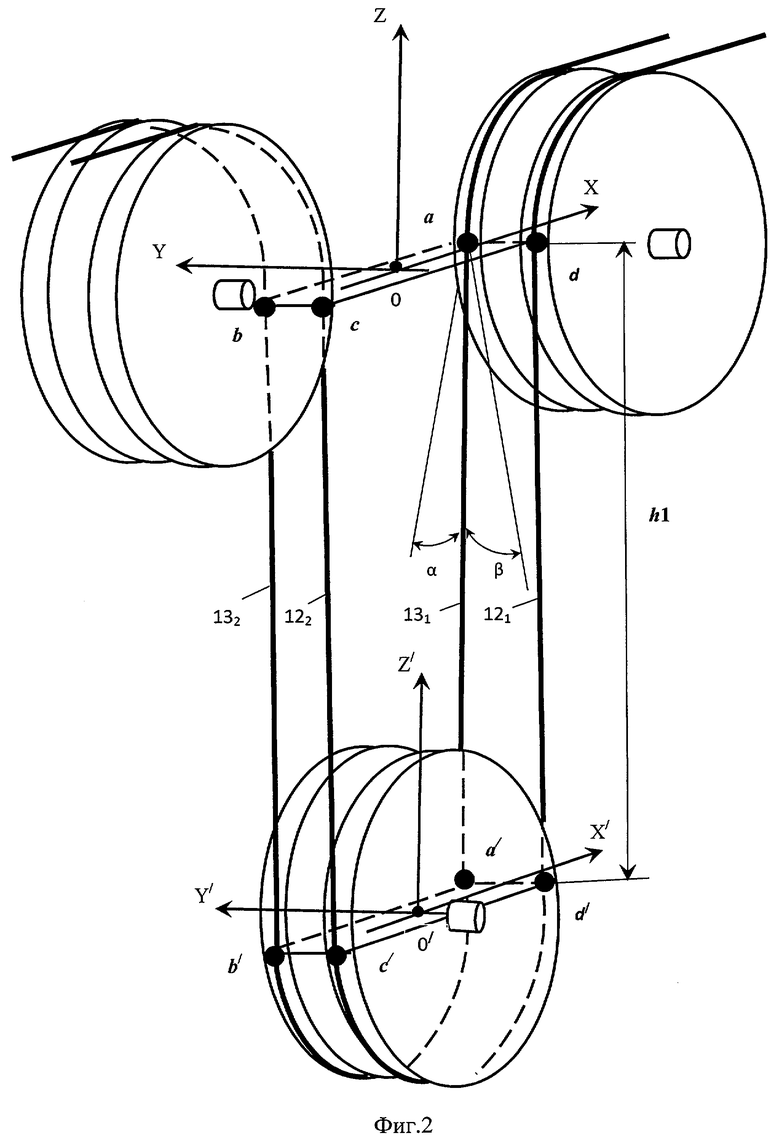
На фиг.1 приведена функциональная схема устройства для измерения углов наклона канатов при сдвоенном полиспасте, на фиг.2 приведены системы координат, связанные со сдвоенным полиспастом при отсутствии поворота грузовой подвески вокруг ее вертикальной оси, на фиг.3 приведена расчетная схема для вычисления погрешностей измерения углов наклона канатов, а фиг.4 иллюстрирует подключение датчиков углового положения к канатам при сдвоенном полиспасте.
Устройство для измерения углов наклона канатов при сдвоенном полиспасте содержит (фиг.1) первый датчик углового положения 1 и второй датчик углового положения 2 в двух взаимно перпендикулярных плоскостях, электронную схему обработки выходных сигналов датчиков 3, включающую в себя последовательно соединенные блок согласования с датчиками 4, микроконтроллер 5 и интерфейсное устройство 6, выход которого связан с системой дистанционного управления перемещением подвижного объекта 7, а также источник питания 8, выходы которого соединены с входами электропитания блока согласования с датчиками 4, микроконтроллера 5 и интерфейсного устройства 6, третий датчик углового положения 9 и четвертый датчик углового положения 10 в двух взаимно перпендикулярных плоскостях и датчик длины каната 11, причем вход первого датчика углового положения 1 механически соединен с первой ветвью первого каната 121, вход второго датчика углового положения 2 механически соединен со второй ветвью первого каната 122, вход третьего датчика углового положения 9 механически соединен с первой ветвью второго каната 131, вход четвертого датчика углового положения 10 механически соединен со второй ветвью второго каната 132, вход датчика длины каната 11 механически связан с первой или второй ветвью любого из двух канатов 12 или 13, а выходы всех датчиков углового положения 1, 2, 9 и 10 и датчика длины каната 11 соединены с входами электронной схемы обработки выходных сигналов датчиков 3.
Устройство для измерения углов наклона канатов при сдвоенном полиспасте работает следующим образом.
Система дистанционного управления перемещением подвижного объекта (груза) 7 имеет следующие каналы управления: перемещением моста, перемещением тележки по мосту, вертикальным перемещением груза и поворотом груза вокруг его вертикальной оси.
Средство подвески груза при сдвоенном полиспасте состоит из расположенных на тележке четырех отклоняющих блоков и двух блоков грузовой подвески. Через отклоняющие блоки и блоки грузовой подвески пропущены два каната, одни концы которых соединены с расположенным на мосте балансиром (на фиг.1 не показан), а другие концы связаны с исполнительным механизмом (обычно барабаном) привода канала управления вертикальным перемещением груза. Наличие средства подвески груза на двух канатах позволяет автоматически выравнивать длину канатов и удерживать груз на весу в случае обрыва одного из канатов.
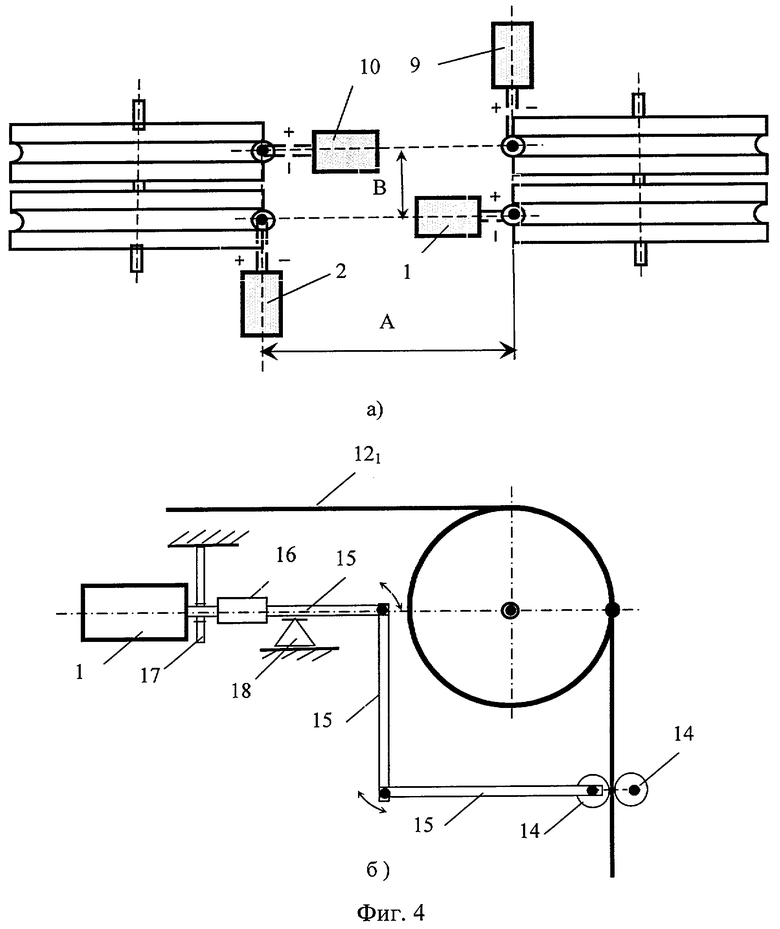
В основе работы устройства лежат зависимости между линейными размерами конструктивных элементов подвески груза, пространственным расположением датчиков углового положения 1, 2, 9 и 10 и погрешностями измерения углов наклона канатов, возникающими вследствие поворота грузовой подвески вокруг ее вертикальной оси. Появление, определение и компенсация указанных погрешностей поясняется фиг.2 - фиг.4а, а на фиг.4б приведен вариант механического соединения первого датчика углового положения 1 с первой ветвью первого каната 121.
На фиг.2 показаны связанные с конструктивными элементами сдвоенного полиспаста системы координат 0XYZ и 0'X'Y'Z' и образованные центральными точками поперечных сечений канатов в местах их схода с отклоняющих блоков и грузовых блоков (в дальнейшем просто точками схода канатов) прямоугольники abcd и a'd'c'd' соответственно для отклоняющих блоков и блоков грузовой подвески. На фиг.2 указаны также измеряемые величины при отсутствии поворота грузовой подвески вокруг ее вертикальной оси Z', а именно: угол наклона канатов α относительно плоскости ada'd', угол наклона канатов β относительно плоскости aba'b', Плоскость aba'b' параллельна плоскости 0XZ (продольной плоскости сдвоенного полиспаста), плоскость ada'd' параллельна плоскости 0YZ (поперечной плоскости сдвоенного полиспаста), поэтому ось Х совпадает с направлением перемещения тележки, ось Y совпадает с направлением перемещения моста грузоподъемного крана, а углы наклона канатов подвески груза α и β однозначно связаны с отклонениями перемещаемого груза от поперечной и продольной плоскостей тележки и моста. На фиг.2 указана также длина каната h1, которая при отсутствии отклонения грузовой подвески от ее вертикальной оси совпадает с длиной средства подвески h (расстоянием между прямоугольниками abcd и a'b'c'd'), однозначно связанной с вертикальным перемещением подвижного груза.
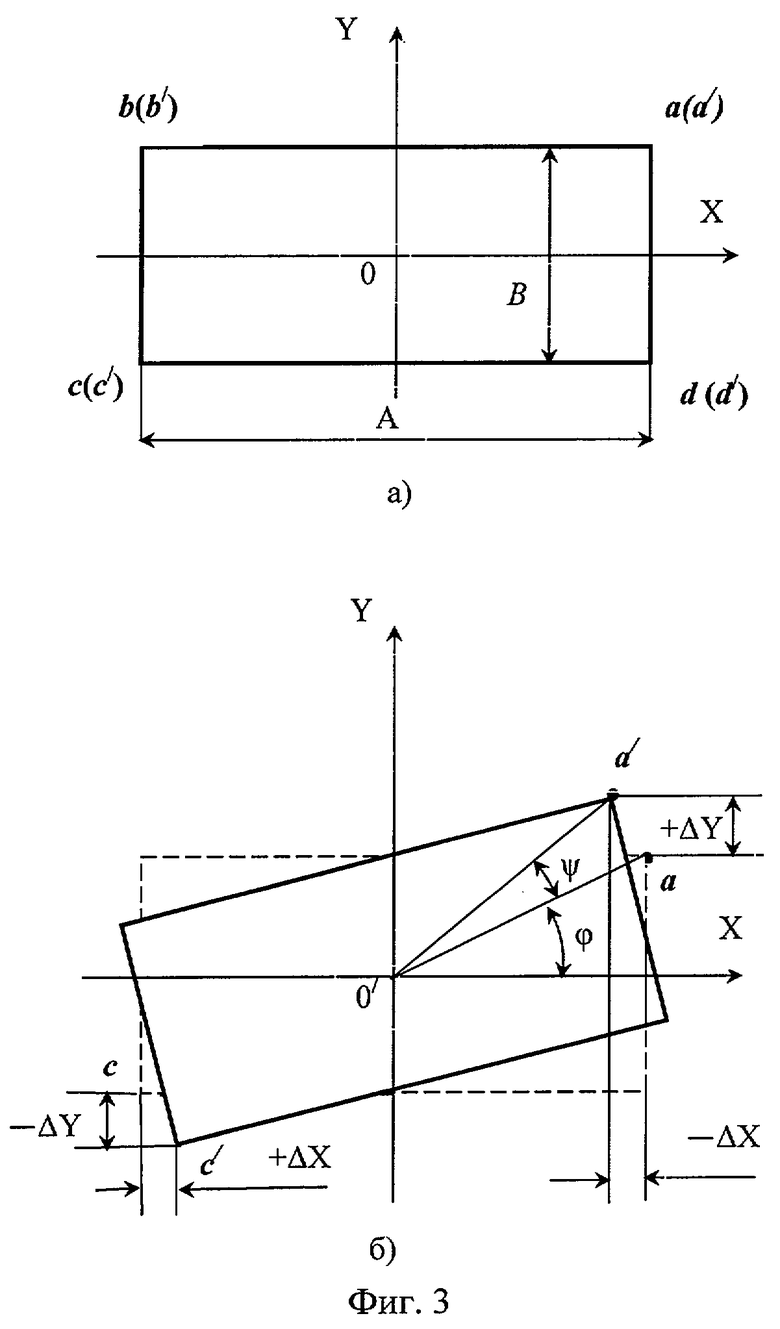
На фиг.3а изображен вид сверху на подвеску груза при сдвоенном полиспасте при отсутствии поворота грузовой подвески вокруг ее вертикальной оси Z' (Z) и при обеспечении вертикальности канатной пары подвески. Тогда верхний и нижний прямоугольники (abcd и a'b'c'd') имеют длину А, равную расстоянию a'b'(c'd') между точками схода канатов, расположенных по горизонтальному диаметру блока грузовой подвески. Прямоугольники abcd и a'b'c'd' имеют ширину В, равную расстоянию a'd'(b'c') между точками схода канатов, расположенными на одноименных сторонах блоков грузовой подвески. При отсутствии перемещения груза в горизонтальной плоскости точки схода канатов с отклоняющих блоков совпадают с точками схода каната с блоков грузовой подвески, то есть верхний и нижний прямоугольники abcd и a'b'c'd' в рассматриваемом случае полностью совпадают.
При отсутствии поворота грузовой подвески вокруг ее вертикальной оси Z' (Z) перемещение груза в горизонтальной плоскости и, следовательно, центра 0' системы координат 0'X'Y'Z' грузовой подвески вызывает линейное отклонение точек схода канатов с блоков грузовой подвески относительно одноименных точек схода каната с отклоняющих блоков. Этим линейным отклонениям соответствуют взаимно перпендикулярные углы α и β отклонения груза относительно точки 0 центра системы координат 0XYZ. При этом перемещения точек схода канатов грузовой подвески происходят по направлению взаимно перпендикулярных сторон прямоугольника abcd и измеряемые углы наклонов канатов α и β подвески груза при сдвоенном полиспасте однозначно связаны с величинами перемещения груза в горизонтальной плоскости по осям Х и Y.
Оценим с помощью фиг.3б величины погрешностей измерения углов наклона канатов подвески груза α и β от вертикальной оси при движении груза в горизонтальной плоскости в направлении, совпадающем с продольной осью моста (Δα), и в направлении, перпендикулярном продольной оси моста (Δβ). Эти погрешности являются следствием поворота на угол ψ грузовой подвески вокруг ее вертикальной оси Z' (Z).
При повороте грузовой подвески при сдвоенном полиспасте против часовой стрелки на угол ψ верхний правый угол α нижнего прямоугольника a'b'c'd' перемещается в точку a', а одноименная точка верхнего прямоугольника остается неподвижной. При этом верхний правый угол α' перемещается по оси Х на величину - ΔY, равную смещению точки a' влево по оси X, а именно
 ,
,
где С - длина диагонали прямоугольника abcd, определяемая выражением C=(A2+B2)1/2;
угол φ зависит от линейных размеров прямоугольника abcd и определяется выражением  .
.
Длина А, ширина В, диагональ С и угол φ прямоугольника abcd являются постоянными величинами, хранящимися в памяти микроконтроллера.
При повороте грузовой подвески при сдвоенном полиспасте против часовой стрелки на угол ψ точка a перемещается также по оси Y на величину ΔY, равную:
 .
.
При сдвоенном полиспасте вызванные поворотом грузовой подвески вокруг ее вертикальной оси погрешности измерения углов отклонения груза от вертикальной оси в горизонтальной плоскости в направлении, перпендикулярном продольной оси моста Δα, и в направлении, совпадающем с продольной осью моста Δβ, определяются при длине средства подвески h следующими выражениями
 ;
;
 ;
;
Эти погрешности имеют существенную величину даже при небольших значениях угла ψ поворота грузовой подвески вокруг вертикальной оси Z' (Z). Например, для точки a в отсутствие отклонения груза от вертикальной оси и при длине подвески h=0,5 м, длине прямоугольника abcd A=0,1 ми ширине прямоугольника abcd B=0,08 м поворот грузовой подвески вокруг вертикальной оси Z' (Z) на угол ψ=10° вызывает погрешности измерения углов наклона канатов подвески груза Δα=-1,04° и Δβ=+0,93°. При отрицательном значении угла поворота ψ=-10° погрешности измерения углов наклона канатов грузовой подвески принимают значения Δα=+0,69° и Δβ=-1,07°.
Как видно из фиг.3б, для расположенной на диагонали прямоугольника abcd симметричной относительно точки а точки с погрешности измерения углов наклона канатов ΔX и ΔY при том же угле ψ поворота грузовой подвески вокруг ее вертикальной оси Z' (Z) имеют те же по абсолютной величине, но противоположные по знаку значения, что и для точки a.
Приведенное рассмотрение возникновения погрешностей измерения углов наклона канатов при сдвоенном полиспасте справедливо также и для канатов, проходящих по отрезкам (b,b') и (c,c'). Это предполагает механическое соединение датчиков углового положения 1, 2, 9 и 10 с грузовыми канатами при сдвоенном полиспасте по схеме, приведенной на фиг.4а. При этом датчики углового положения 1 и 10 измеряют соответственно углы β1 и β2 наклона ветвей канатов 121 и 132 в поперечной плоскости средства подвески груза, а датчики углового положения 2 и 9 измеряют соответственно углы α1 и α2 наклона ветвей канатов 122 и 131 в продольной плоскости средства подвески груза. Тогда истинные значения взаимно перпендикулярных углов наклона канатов подвески груза α и β определяются как среднеарифметическое значение показаний соответственно пары датчиков углового положения 1 и 10 и пары датчиков углового положения 2 и 9, что обеспечивает взаимную компенсацию погрешностей измерения углов наклона канатов, обусловленных поворотом грузовой подвески вокруг ее вертикальной оси Z' (Z).
Поэтому устройство для измерения углов наклона канатов при сдвоенном полиспасте в процессе своей работы считывает с помощью электронной схемы обработки выходных сигналов датчиков 3 показания первого 1, второго 2, третьего 9 и четвертого 10 датчиков углового положения, а также показание h1 датчика длины каната 11. Входящие в состав электронной схемы обработки выходных сигналов датчиков 3 блок согласования с датчиками 4, микроконтроллер 5 и интерфейсное устройство 6 обеспечиваются от источника питания 8 питающими напряжениями необходимого уровня и мощности. При этом независимо от принципа действия датчиков углового положения 1, 2, 9, 10, а также датчика длины каната 11 и вида их выходных сигналов блок согласования с датчиками 4 осуществляет типовую фильтрацию каждого из выходных сигналов указанных датчиков от высокочастотных помех и преобразование в соответствующий их показанию параллельный цифровой код, поступающий в микроконтроллер 5.
По полученным данным микроконтроллер 5 вычисляет:
- значения углов наклона канатов α и β в двух взаимно перпендикулярных плоскостях при сдвоенном полиспасте по формулам
 ;
;  .
.
- результирующую величину угла наклона канатов при сдвоенном полиспасте относительно вертикальной оси грузовой подвески Y по формуле
Y=(α2+β2)1/2;
- значение длины средства подвески h при сдвоенном полиспасте по формуле
h=h1·cosY;
- значение угла ψ поворота грузовой подвески вокруг ее вертикальной оси Z' по следующим формулам





Усреднение обрабатываемых сигналов при вычислении углов наклона канатов α и β в двух взаимно перпендикулярных плоскостях и угла ψ поворота грузовой подвески вокруг ее вертикальной оси Z' уменьшает случайную погрешность измерения указанных величин, обусловленную неравномерностью движения канатов через элементы подвижного механического соединения с ними датчиков углов положения канатов 1, 2, 9 и 10. Однако если вычислительных возможностей микроконтроллера недостаточно для вычисления усредненного значения угла ψ поворота грузовой подвески вокруг ее вертикальной оси, то определение угла ψ может осуществляться по одной из формул для вычисления углов ψ1, ψ2, ψ3 или ψ4.
Определенные значения углов наклона канатов α и β, результирующей величины угла наклона канатов относительно вертикальной оси грузовой подвески Y, длины средства подвески груза h и угла поворота грузовой подвески вокруг ее вертикальной оси ψ микроконтроллер 5 через интерфейсное устройство 6 передает в систему дистанционного управления перемещением подвижного объекта 7 для использования в каналах управления горизонтальными перемещениями моста и тележки, а также вертикальным перемещением и поворотом груза вокруг его вертикальной оси.
В качестве датчиков углового положения 1, 2, 9 и 10, а также датчика длины каната 11 могут быть использованы измерительные преобразователи с аналоговым выходным сигналом постоянного тока. Тогда блок согласования с датчиками 4 представляет собой многоканальный аналого-цифровой преобразователь.
Если в качестве датчиков углового положения 1, 2, 9 и 10, а также датчика длины каната груза 11 используются индуктивные потенциометры (резольверы), например, типа LVDT фирмы Lucas Schaevitz, то блок согласования с датчиками 4 представляет собой набор преобразователей сдвига фазы синусоидального сигнала в код.
Если в качестве датчиков углового положения 1, 2, 9 и 10, а также датчика длины каната 11 используются цифровые инкрементальные датчики фирмы Heidenheim или серии ЛИР фирмы СКБ ИС (г. Санкт-Петербург), то блок согласования с датчиками 4 представляет собой набор квадратурных преобразователей выходных сигналов датчиков в код.
Если в качестве датчиков углового положения 1, 2, 9 и 10, а также датчика длины каната 11 используются цифровые абсолютные датчики фирмы British Encoder Products или серии ЛИР-ДА фирмы СКБ ИС (г. Санкт-Петербург), то блок согласования с датчиками 4 представляет собой набор обычных портов ввода цифровых сигналов в параллельном коде.
Датчики углового положения 1, 2, 9 и 10, а также датчик длины каната 11 обычно имеют входной вал, угол поворота которого преобразуется в пропорциональное изменение выходного сигнала. Поэтому соединение валов указанных датчиков с канатом осуществляется с помощью специального механизма, передающего перемещение каната в требуемой плоскости на входной вал датчика.
На фиг.4б приведена схема механического соединения датчика углового положения 1 с первой ветвью первого каната 121 при недостатке места для его размещения между отклоняющими блоками. В данном примере направляющие валики 14 с помощью системы рычагов 15 передают угловое перемещение каната 121 в перпендикулярном плоскости фиг.4 направлении на входной вал датчика углового положения 1, жестко соединенный с системой рычагов 15 с помощью муфты 16. Посредством механических элементов 17 и 18 датчик углового положения 1 и система рычагов 15 закреплены на тележке, а система рычагов 15 не допускает поворота вокруг ее продольной оси. При этом ось входного датчика углового положения 1 совпадает с направлением прямой линии, проходящей через точку схода каната 121. Вместо направляющих валиков 14 может использоваться скользящая по канату обойма, через которую пропущен канат 121.
Аналогичное механическое соединение с любой ветвью любого из канатов 12 и 13, но без ограничений по размещению относительно отклоняющих и грузовых блоков может иметь датчик длины каната 11, отличаясь тем, что направляющие валики должны обеспечивать непроскальзывающее соединение его входного вала с канатом 12 или 13.
Предложенное на фиг.4 расположение датчиков углового положения 1, 2, 9 и 10 и закрепление их на подвижной тележке обеспечивает измерение углов наклона канатов при сдвоенном полиспасте в системе координат, связанной с грузоподъемным краном. Определение углов наклона канатов α и β с компенсацией погрешностей, вызванных поворотом грузовой подвески относительно ее вертикальной оси, позволяет повысить точность измерения не только указанных углов, но и результирующего угла Y наклона канатов при сдвоенном полиспасте относительно вертикальной оси грузовой подвески. Определение длины средства подвески груза h и угла ψ поворота грузовой подвески вокруг ее вертикальной оси расширяет функциональные возможности устройства для измерения углов наклона канатов при сдвоенном полиспасте и позволяет использовать его в составе системы дистанционного управления перемещением подвижного объекта 7 для реализации управления по каналу вертикальным перемещением груза и по каналу управления поворотом грузовой подвески (груза) вокруг ее вертикальной оси.
Микроконтроллер 5 должен быть способен выполнять алгебраические и тригонометрические вычисления, необходимые для определения значений углов наклона канатов α и β в двух взаимно перпендикулярных плоскостях, результирующей величины угла наклона канатов относительно вертикальной оси грузовой подвески Y, значения длины средства подвески h и значения угла ψ поворота грузовой подвески вокруг ее вертикальной оси с необходимыми для целей управления перемещением подвижного груза быстродействием и точностью. В качестве микроконтроллера 5 могут использоваться микроконтроллеры класса DSP и им подобные.
Интерфейсное устройство 6 может содержать несколько каналов передачи информации с последовательной мультиплексированной передачей данных (RS-485, CAN, SPI и другие) и/или по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА КАНАТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2007 |
|
RU2346879C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС | 2007 |
|
RU2355039C1 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| Грузоподъёмный механизм (варианты) | 2023 |
|
RU2809870C1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| ГРУЗОВАЯ ПОДВЕСКА КРАНОВОЙ СТРЕЛЫ | 1990 |
|
RU2006447C1 |
| ПОДВЕСКА ГРУЗОВОЙ СТРЕЛЫ | 2010 |
|
RU2447009C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
Изобретение относится к электроизмерительной технике и может быть использовано в системах дистанционного управления перемещением подвижного объекта (груза) с помощью грузоподъемных кранов. Устройство для измерения углов наклона канатов при сдвоенном полиспасте содержит первый, второй датчики углового положения в двух взаимно перпендикулярных плоскостях и третий, четвертый датчики углового положения в двух взаимно перпендикулярных плоскостях, датчик длины каната, электронную схему обработки выходных сигналов датчиков. Выход электронной схемы обработки выходных сигналов датчиков связан с системой дистанционного управления перемещением подвижного объекта. Входы первого и второго датчиков углового положения механически соединены с первым канатом, входы третьего и четвертого датчиков углового положения механически соединены со вторым канатом. Вход датчика длины каната механически связан с любым из канатов, а выходы всех датчиков углового положения и датчика длины каната соединены с входами электронной схемы обработки выходных сигналов датчиков. Достигается повышение точности измерения углов наклона канатов в двух взаимно перпендикулярных плоскостях при сдвоенном полиспасте и возможном повороте грузовой подвески вокруг ее вертикальной оси. 7 з.п. ф-лы, 6 ил.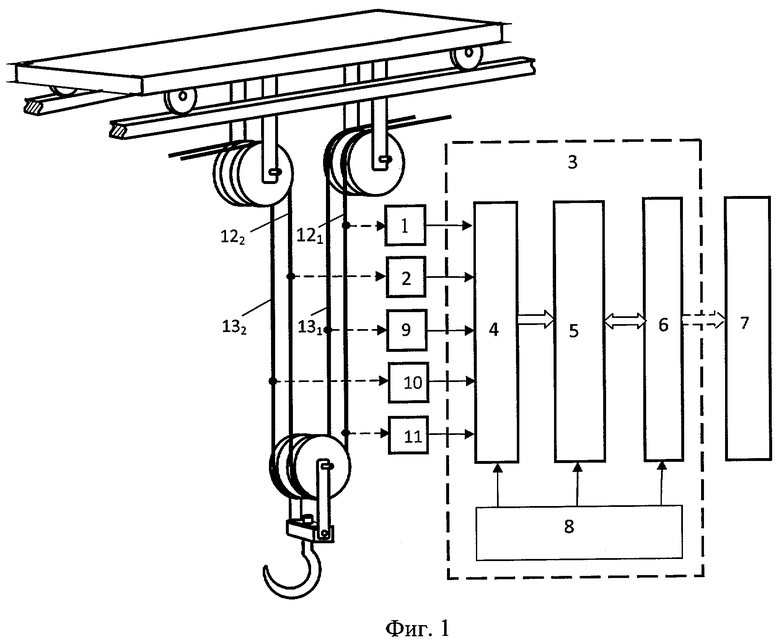
1. Устройство для измерения углов наклона канатов при сдвоенном полиспасте, содержащее первый и второй датчики углового положения в двух взаимно перпендикулярных плоскостях, электронную схему обработки выходных сигналов датчиков, выход которой связан с системой дистанционного управления перемещением подвижного объекта, причем входы первого и второго датчиков углового положения механически соединены с первым канатом, а выходы первого и второго датчиков углового положения связаны с входами электронной схемы обработки выходных сигналов датчиков, отличающееся тем, что дополнительно содержит третий и четвертый датчики углового положения в двух взаимно перпендикулярных плоскостях и датчик длины каната, входы третьего и четвертого датчиков углового положения механически соединены со вторым канатом, вход датчика длины каната механически связан с любым из канатов, а выходы третьего и четвертого датчиков углового положения и датчика длины каната соединены с входами электронной схемы обработки выходных сигналов датчиков.
2. Устройство по п.1, отличающееся тем, что второй и третий датчики углового положения способны измерять углы наклона ветвей канатов α1 и α2 в продольной плоскости средства подвески груза, а первый и четвертый датчики углового положения способны измерять углы наклона ветвей канатов β1 и β1 в поперечной плоскости средства подвески груза, при этом датчики углового положения механически соединены с ветвями канатов таким образом, что их входные валы соосны с прямыми, проходящими через точки схода канатов с отклоняющих блоков.
3. Устройство по п.1, отличающееся тем, что электронная схема обработки выходных сигналов датчиков выполнена с возможностью определения значений углов наклона канатов α и β в двух взаимно перпендикулярных плоскостях путем преобразования выходных сигналов датчиков углового положения по формулам  и
и  .
.
4. Устройство по п.1, отличающееся тем, что электронная схема обработки выходных сигналов датчиков выполнена с возможностью определения результирующего угла наклона канатов путем преобразования вычисленных углов наклона канатов α и β в двух взаимно перпендикулярных плоскостях по формуле Y=(α2+β2)1/2.
5. Устройство по п.1, отличающееся тем, что электронная схема обработки выходных сигналов датчиков выполнена с возможностью определения длины средства подвески груза h путем преобразования измеренной длины каната h1 по формуле h=h1·cosY.
6. Устройство по п.1, отличающееся тем, что электронная схема обработки выходных сигналов датчиков выполнена с возможностью определения угла ψ поворота грузовой подвески вокруг ее вертикальной оси Z/ по следующим формулам:





где А и В - расстояния между точками схода канатов с отклоняющих блоков, в продольной и поперечной плоскостях подвески груза, С=(A2+В2), а  .
.
7. Устройство по любому из пп.1-6, отличающееся тем, что электронная схема обработки выходных сигналов датчиков включает в себя последовательно соединенные блок согласования с датчиками, микроконтроллер и интерфейсное устройство.
8. Устройство по п.7, отличающееся тем, что постоянные величины А, В, С и φ хранятся в памяти микроконтроллера электронной схемы обработки выходных сигналов датчиков.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА КАНАТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2007 |
|
RU2346879C2 |
| Справочник по кранам | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| д-ра техн | |||
| наук проф | |||
| М | |||
| М | |||
| ГОХБЕРГА | |||
| - Л.: Машиностроение, 1988, стр.269 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРАТНОСТИ ЗАПАСОВКИ ПОЛИСПАСТА | 2006 |
|
RU2341445C2 |
| JP 2008074579 А, 03.04.2008. | |||

