Настоящее изобретение относится к способу и устройству для построения траектории полета на малой высоте для следования по ней летательного аппарата.
В рамках настоящего изобретения выражение траектория полета на малой высоте понимается как означающее траекторию полета, позволяющую летательному аппарату следовать как можно ближе к пролетаемой местности, при исключении любого риска столкновения с частью местности. Поэтому данная траектория расположена на минимальной заданной высоте над местностью, например 500 футов (около 150 метров).
В частности, хотя и не исключительно, настоящее изобретение относится к тактическому военно-транспортному самолету, который характеризуется низкой тяговооруженностью и большой инерцией и у которого время выполнения маневров обычно является продолжительными, по сравнению с более легким и маневренным самолетом, например истребителем. Кроме того, для подобного военно-транспортного самолета, в общем, желательно оставаться труднообнаруживаемым.
Известно, что вычисление траектории полета на малой высоте вышеупомянутого типа требует наличия очень больших вычислительных ресурсов у бортовых компьютеров, используемых для данной цели.
В настоящее время экипажу летательного аппарата, в частности военно-транспортного самолета вышеупомянутого типа, может потребоваться квазинемедленно перейти на траекторию полета на малой высоте в некоторых оперативных летных ситуациях, например при снижении к земле в случае непредвиденной угрозы, чтобы воспользоваться маскировкой на местности, или при возникновении условий IMC («приборных метеорологических условий»), которые нельзя предвидеть в полете на малой высоте в условиях VMC («визуальных метеорологических условий»), требующих автоматического управления.
Поскольку вычислительные ресурсы летательного аппарата, безусловно, ограничены, то, как правило, невозможно построить длительную траекторию полета на малой высоте за очень короткий временной промежуток, порядка нескольких секунд, как требуется в оперативных летных ситуациях, например в вышеупомянутых ситуациях.
Данный недостаток становится еще более выраженным применительно к, например, вышеописанным тактическим военным транспортным самолетам, большая инерционность которых требует вычисления траекторий полета на малой высоте с помощью бортовых моделей тактико-технических характеристик (в частности, характеристики скороподъемности летательного аппарата). Подобный режим вычислений с использованием моделей тактико-технических характеристик заметно увеличивает время вычислений, в частности, относительно времени, предусмотренного, например, для истребителя, тяговооруженность которого делает влияние характеристики скороподъемности менее критичным.
Целью настоящего изобретения является устранение упомянутых недостатков. Настоящее изобретение относится к способу, в частности, быстрого и точного построения траектории полета на малой высоте для следования по ней летательного аппарата, в частности военно-транспортного самолета, при этом упомянутая траектория полета содержит латеральную траекторию и вертикальную траекторию и строится на основании профиля местности (поступающего из базы данных по местности), относящегося к местности, подлежащей пролету летательным аппаратом, таким образом, чтобы позволить упомянутому летательному аппарату следовать (как можно ближе) к упомянутой пролетаемой местности.
В соответствии с настоящим изобретением упомянутый способ отличается тем, что упомянутая вертикальная траектория для траектории полета определяется во время полета летательного аппарата последовательным методом при полете, с выполнением данного определения отрезок за отрезком, при этом для каждого отрезка вертикальной траектории:
- участок профиля, который относится к местности, подлежащей пролету согласно соответствующей латеральной траектории, извлекается из базы данных местности, содержащей упомянутый профиль местности; и
- упомянутый отрезок вертикальной траектории определяется с помощью упомянутого участка профиля, извлеченного упомянутым образом, в виде функции характеристик скороподъемности и снижения летательного аппарата.
Таким образом, благодаря настоящему изобретению вертикальная траектория для траектории полета определяется не целиком за одну операцию перед ее использованием во время полета, а определяется отрезок за отрезком во время полета, что дает возможность очень быстро использовать первый отрезок из данных отрезков, по которому затем может следовать летательный аппарат, пока определяются следующие отрезки. Данный поэтапный режим вычислений выполняется не только для определения отрезков вертикальной траектории, но также для извлечения профиля местности (в форме участков профиля), причем подобное извлечение также в стандартном режиме требует очень больших вычислительных ресурсов.
Следовательно, настоящее изобретение учитывает тот факт, что, если траекторию полета следует вычислять на длинной дистанции, то вся траектория не обязательно должна быть в наличии сразу в начале полета, но в наличии должен быть только некоторый участок длины, который допускает немедленное следование летательного аппарата и который дает возможность располагать подходящим временем выхода на режим и минимально необходимым уровнем безопасности и упреждения.
Настоящее изобретение особенно хорошо подходит для траектории следующего типа, для которой:
- вертикальная траектория состоит из участков постоянного наклона, пролетаемых с заданной предварительно установленной скоростью;
- наклон каждого участка набора высоты или снижения ограничен максимальной характеристикой скороподъемности или снижения летательного аппарата, определяемой на основе бортовой модели тактико-технических характеристик;
- поэтому наклон каждого участка оптимизируется в виде функции профиля местности; и
- вычисление выполняется таким образом, что траектория является самой низкой траекторией, дающей возможность пролетать над самой высокой вершиной на рассматриваемом отрезке.
В предпочтительном варианте для определения упомянутой вертикальной траектории дополнительно определяется переходная траектория каждый раз между двумя последовательными отрезками вертикальной траектории, при этом упомянутая переходная траектория характеризует возможность пролета от одного отрезка до другого отрезка. Упомянутая переходная траектория определяется предпочтительно продолжением отрезка, который расположен выше в плоскости перехода двух последовательных отрезков вертикальной траектории, к другому отрезку, вплоть до соединения.
Кроме того, в предпочтительном варианте заранее выполняется проверка для подтверждения, совместим ли каждый участок профиля, извлеченный из упомянутой базы данных, с максимальной характеристикой скороподъемности летательного аппарата, и, если обнаруживается несовместимость, соответствующий участок профиля корректируется для устранения данной несовместимости, при этом участок профиля, скорректированный таким образом, применяется для определения соответствующего отрезка вертикальной траектории.
Следовательно, в большинстве оперативных ситуаций можно упреждать любую критическую конфигурацию местности, с которой можно встретиться в конце вычисления каждого отрезка траектории. Точнее, до определения каждого отрезка в наличии имеется информация, касающаяся возможности пролета по следующему отрезку в виде функции от соответствующего участка профиля, и в ситуации, когда невозможно упредить набор высоты, данная ситуация учитывается в скорректированном участке профиля.
Кроме того, в предпочтительном варианте упомянутая горизонтальная траектория:
- либо соответствует плану полета, обеспечиваемому пилотом летательного аппарата;
- либо определяется (автоматически) автоматическим прокладчиком маршрута летательного аппарата.
Настоящее изобретение относится также к устройству для построения, причем исключительно быстро и точно, траектории полета на малой высоте для следования по ней летательного аппарата, в частности военно-транспортного самолета, при этом упомянутая траектория полета содержит латеральную траекторию и вертикальную траекторию.
В соответствии с изобретением упомянутое устройство относится к типу устройств, содержащих:
- базу данных, содержащую профиль местности, относящийся к местности, подлежащей пролету летательным аппаратом;
- набор информационных источников, способных выдавать, по меньшей мере, информацию, касающуюся летательного аппарата;
- первое средство для определения упомянутой латеральной траектории для траектории полета; и
- второе средство для определения упомянутой вертикальной траектории для траектории полета,
и характеризуется тем, что упомянутое второе средство сформировано таким образом, чтобы определять упомянутую вертикальную траекторию во время полета летательного аппарата последовательным методом при полете с выполнением данного определения отрезок за отрезком, и тем, что упомянутое второе средство содержит, по меньшей мере:
- первый элемент для извлечения из упомянутой базы данных, по меньшей мере, одного участка профиля, который относится к местности, подлежащей пролету согласно соответствующей горизонтальной траектории; и
- второй элемент для определения отрезка вертикальной траектории с помощью упомянутого участка профиля, извлеченного упомянутым первым элементом, в виде функции характеристики скороподъемности и снижения летательного аппарата, происходящей из упомянутого набора информационных источников.
Поэтому устройство в соответствии с изобретением делает возможной оптимизацию производительности вычислений различных вычислительных средств, используемых при построении траектории полета на малой высоте, и, в частности, упомянутого второго средства, предназначенного для определения вертикальной траектории.
В конкретном варианте осуществления упомянутое второе средство дополнительно содержит третий элемент для определения траектории перехода между двумя последовательными отрезками вертикальной траектории, при этом упомянутая переходная траектория характеризует возможность пролета от одного отрезка до другого отрезка.
Кроме того, в предпочтительном варианте упомянутое второе средство дополнительно содержит:
- четвертый элемент для проверки совместим ли каждый участок профиля, который извлечен упомянутым первым элементом, с максимальной характеристикой скороподъемности летательного аппарата; и
- пятый элемент для коррекции каждого участка профиля, для которого обнаружена несовместимость упомянутым четвертым элементом, причем каждый участок профиля, скорректированный таким образом, используется упомянутым вторым элементом для определения соответствующего отрезка вертикальной траектории.
Кроме того, в предпочтительном варианте упомянутый набор информационных источников содержит, по меньшей мере, одну базу данных, содержащую информацию, касающуюся характеристик скороподъемности и снижения летательного аппарата.
Прилагаемые чертежи поясняют осуществление изобретения. На данных чертежах одинаковые позиции обозначают одинаковые элементы.
Фиг.1 - принципиальная схема устройства в соответствии с изобретением.
Фиг.2-6 содержат графические иллюстрации, позволяющие объяснить построение в соответствии с изобретением вертикальной траектории для траектории полета на малой высоте.
Устройство 1 в соответствии с изобретением, схематически изображенное на Фиг.1, предназначено для построения траектории TO полета на малой высоте для следования летательного аппарата A, в частности военно-транспортного самолета. Упомянутая траектория TO полета содержит латеральную траекторию TL (не показанную), которая задается в горизонтальной плоскости, и вертикальную траекторию TV (или профиль полета), которая задается в вертикальной плоскости и представлена на Фиг.2-6.
Упомянутая траектория TO полета является траекторией полета на малой высоте, позволяющей летательному аппарату A следовать как можно ближе к пролетаемой местности 2.
Для достижения упомянутой цели предусмотрено упомянутое устройство 1, которое находится на борту летательного аппарата A и относится к типу устройств, содержащих:
- базу данных 3, содержащую профиль PT местности, относящийся к местности 2, подлежащей пролету летательным аппаратом A, рельеф 4 которой частично представлен на Фиг.2-6. В примерах, представленных на данных Фиг.2-6, профиль PT местности находится на заданной минимальной безопасной высоте H над упомянутым рельефом 4. Упомянутая база данных 3 может быть:
- цифровой базой данных, загружаемой перед полетом в летательный аппарат A и содержащей упомянутый профиль PT местности, или
- базой данных, создаваемой в полете таким устройством, как, например, радар в картографическом режиме, который определяет упомянутый профиль PT местности на борту летательного аппарата A;
- набор 5 информационных источников, способных выдавать информацию, касающуюся летательного аппарата A, например, как показано далее;
- средство 6 для построения упомянутой латеральной траектории TL для траектории TO полета; и
- средство 7 для построения упомянутой вертикальной траектории TV для траектории TO полета.
Упомянутое средство 6 (например, средство ввода данных или автоматический прокладчик маршрута) является таким, что упомянутая горизонтальная траектория TL:
- либо соответствует плану полета, вводимому пилотом летательного аппарата A;
- либо определяется (автоматически) автоматическим прокладчиком маршрута летательного аппарата A.
В конкретном варианте осуществления, представленном на Фиг.1,
- упомянутое средство 6 соединено линией 8 связи с упомянутым средством 7;
- упомянутые средства 6 и 7 сгруппированы в центральном блоке 9, который соединен линиями 10 и 11 связи соответственно с базой данных 3 и набором 5 информационных источников; и
- устройство 1 содержит, кроме того, средство 12 отображения, которое соединено линией 13A связи с центральным блоком 9 и которое может представлять пилоту летательного аппарата A результаты обработки, производимой упомянутым центральным блоком 9. Это, в частности, позволяет пилоту визуально убеждаться, не являются ли результаты вычисления вертикальной траектории TV несообразными в отношении упомянутого профиля PT местности. Данные результаты могут также передаваться в другие пользовательские устройства (не показанные) и, в частности, в стандартную систему управления летательного аппарата A по линии 13B связи.
В соответствии с изобретением упомянутое средство 7 сформировано таким образом, чтобы определять упомянутую вертикальную траекторию TV во время полета летательного аппарата A. Конкретнее, данное средство сформировано таким образом, чтобы определять упомянутую вертикальную траекторию TV последовательным методом при полете, т.е. отрезок TRi (вертикальной траектории TV) за отрезком TRi (вертикальной траектории TV). Для этой цели упомянутое средство 7 содержит, по меньшей мере:
- элемент 14 для извлечения из упомянутой базы данных 3, по меньшей мере, одного участка SPi профиля, который относится к местности 2, подлежащей пролету согласно соответствующей латеральной траектории TL, и который по этом причине представляет часть упомянутого профиля PT местности, которая содержится в упомянутой базе данных 3; и
- элемент 15, который соединен линией 16 связи с упомянутым элементом 14, для определения отрезка TRi вертикальной траектории TV с помощью упомянутого участка SPi профиля, извлеченного упомянутым элементом 14, в виде функции характеристики скороподъемности и снижения летательного аппарата A, которая поступает из базы данных 17 тактико-технических характеристик (формирующей, например, часть упомянутого набора информационных источников) и которая принимается по упомянутой линии 11 связи.
Таким образом, средство 7 устройства 1 в соответствии с изобретением определяет вертикальную траекторию TV в траектории TO полета не целиком за одну операцию перед ее использованием для полета, а отрезок TRi за отрезком TRi во время полета (который использует данную траекторию). Весь набор различных отрезков TRi, определенных таким образом, где i является переменным целым числом, которое может быть очень большим, формирует впоследствии упомянутую вертикальную траекторию TV. Это позволяет пилоту или системам управления, например, очень быстро воспользоваться первым отрезком или отрезками TRi, по которым может проследовать летательный аппарат A, после запроса (показанного символом 18 на Фиг.2, 3, 5 и 6) для построения траектории TO полета на малой высоте, например, как изображено, в то время как устройство 1 продолжает определять последовательным методом следующие отрезки. Первый отрезок TR1 становится доступным по истечении времени t0 порядка нескольких секунд после упомянутого запроса, так что далее с данного момента летательный аппарат A может начинать следовать траектории TO полета на малой высоте в процессе ее построения, по отрезку TR1.
Период t0 является априори фиксированным как максимальный период, позволяющий получать траекторию достаточной длины, чтобы можно было привязаться к данной траектории. Данная длина траектории, добавляемая после времени t0, определяет потребность в вычислительной мощности бортового средства картографического отображения траектории.
Подобный поэтапный режим вычислений выполняется не только для определения отрезков TRi вертикальной траектории TV с помощью средства 15, но также для извлечения профиля PT местности (в виде участков SPi профиля) средством 14, причем подобное извлечение в стандартном виде требует очень значительных вычислительных ресурсов.
Таким образом, устройство 1 в соответствии с изобретением позволяет построить особенно быстро и точно траекторию TO полета на малой высоте. Упомянутое устройство 1 позволяет, в частности, устранить недостаток, обусловленный наличием ограниченных вычислительных ресурсов на борту летательного аппарата A. Безусловно, данные вычислительные ресурсы должны быть достаточны для того, чтобы можно было определить отрезок TR1 минимально необходимой длины за время t0.
Согласно изобретению траектория TO полета на малой высоте может поступать в распоряжение пилота и/или системы управления летательного аппарата A почти немедленно, что особенно выгодно в некоторых оперативных летных ситуациях, например при снижении к земле в случае непредвиденной угрозы, чтобы воспользоваться маскировкой на местности 2, или при возникновении условий IMC, не предусмотренных в полете на малой высоте в условиях VMC, требующих автоматического управления, которое описано выше.
Настоящее изобретение также особенно полезно для тактического военного транспортного самолета, который имеет низкую тяговооруженность и большую инерцию, для которого вычисление траектории TO полета на малой высоте требует очень больших вычислительных ресурсов, поскольку в данном случае необходимо использовать бортовые модели тактико-технических характеристик (базу данных 17 тактико-технических характеристик).
Устройство 1 в соответствии с изобретением дополнительно содержит средство 19 включения, которое соединено линией 20 связи с упомянутым центральным блоком 9 и которое позволяет оператору включать (то есть запрашивать) создание траектории TO полета.
На Фиг.2 данное средство включения изображено символом 18. Через время t0 после такого включения устройство 1 способно выдать первый отрезок TR1 траектории полета, который задан над горизонтальной дистанцией D1. После этого летательный аппарат A может пролетать по данному первому отрезку TR1 траектории полета, пока устройство 1 в соответствии с изобретением определяет второй отрезок TR2, который имеет горизонтальную дистанцию D2 (Фиг.3), и т.д. и т.п.
Следует отметить, что время t0 является априори фиксированным в бортовом устройстве таким образом, чтобы соответствовать оперативным требованиям и конфигурациям рельефа, с которыми приходится встречаться при полете.
Упомянутое средство 7 устройства 1 в соответствии с изобретением содержит также элемент 22, который соединен линией 23 связи с элементом 15, для определения траектории Li перехода между двумя последовательными отрезками TRi и TRi+1 вертикальной траектории TV. Данная переходная траектория Li позволяет пролетать от любого отрезка TRi до следующего за ним отрезка TRi+1, как показано на Фиг.4 или на Фиг.3, для переходной траектории L1 перехода и отрезков TR1 и TR2.
Упомянутое средство 22 определяет упомянутую переходную траекторию Li путем продолжения отрезка, который расположен выше в плоскости PO перехода двух последовательных отрезков TRi и TRi+1 траектории. Следовательно, данное средство продолжает упомянутый отрезок к другому отрезку вплоть до соединения с данным другим отрезком. Поэтому:
- в примере на Фиг.3 средство 22 продолжает отрезок TR1 (следующий первым по ходу), так как данный отрезок расположен выше, чем следующий отрезок TR2 на уровне плоскости PO перехода; и
- в примере на Фиг.4 средство 22 продолжает отрезок TRi+1 (следующий вторым по ходу), так как последний расположен выше, чем предыдущий отрезок TRi на уровне упомянутой плоскости PO перехода.
Кроме того, средство 7 устройства 1 в соответствии с изобретением дополнительно содержит:
- элемент 24, который соединен линией 25 связи с элементом 14 и который предназначен для подтверждения, совместим ли каждый участок SPi профиля, который извлекается данным элементом 14, с максимальной характеристикой скороподъемности летательного аппарата A, поступающей из упомянутой базы данных 17; и
- элемент 26, который соединен линиями 27 и 28 связи с упомянутыми элементами 24 и 15, для коррекции каждого участка SPi профиля, для которого обнаружена несовместимость упомянутым элементом 24, нижеописанным образом.
Каждый участок SPi профиля, скорректированный элементом 26, затем используется элементом 15 вместо нескорректированного участка профиля, поступающего из элемента 14, для определения соответствующего отрезка TRi вертикальной траектории TV.
Следовательно, устройство 1 в соответствии с изобретением может упреждать любую критическую конфигурацию местности (кроме крутого холма перед летательным аппаратом), с которой можно встретиться в конце вычисления каждого отрезка TRi вертикальной траектории. Поэтому, в частности, перед определением каждого отрезка TRi в наличии имеется информация относительно возможности пролета по соответствующему отрезку TRi+1 в зависимости от соответствующего участка SPi+1 профиля, и в случае, когда требуется упредить набор высоты, данная ситуация учитывается скорректированным участком SPi профиля.
Для этого упомянутый элемент 24 использует вспомогательную кривую 29, которая характеризует текущую максимальную характеристику скороподъемности летательного аппарата A. Данная характеристика вычисляется стандартным методом при предварительно установленной скорости летательного аппарата A или скорости, которая дает максимальный наклон, если невозможен набор высоты по вспомогательной кривой, вычисленной при текущей скорости. В данном случае летательный аппарат A набирает высоту и выходит из режима полета на малой высоте (тогда выдается предупредительный сигнал пилоту).
Упомянутая вспомогательная кривая 29 характеризует участок набора высоты, который базируется на рассматриваемом профиле местности. Затем данная вспомогательная кривая 29 перемещается для сканирования профиля местности для каждого отрезка вертикальной траектории, как показано стрелкой 30 на Фиг.2 и 5. Сканирование начинается (от носа летательного аппарата) в начале первого участка SP1 профиля, который извлекается для построения первого отрезка TR1 вертикальной траектории TV. Данная кривая 29 набора высоты не должна пересекать профиль местности на уровне рассматриваемого отрезка вертикальной траектории или на уровне следующего отрезка (если соответствующий профиль местности уже извлечен).
В соответствии с изобретением вычисление отрезка TRi вертикальной траектории начинается с наиболее высокой вершины над рассматриваемым участком (соответствующей дистанции D1, D2, D3 на Фиг.5 и 6) таким образом, чтобы гарантировать пролет мимо данной вершины.
Кроме того, в соответствии с изобретением удается как можно быстрее получить гарантию, что отрезок допускает пролет. Следовательно, это следует выполнять перед вычислением вертикальной траектории, соответствующей данному отрезку местности. Так как вычисление данной траектории является оптимизированным вычислением, оно занимает время. Следовательно, перед этим профиль местности сканируется при помощи вспомогательной кривой 29, которая представляет собой максимальную характеристику скороподъемности. Поскольку в таком случае можно упредить набор высоты, сканирование начинается от текущего положения летательного аппарата A.
В примере на Фиг.5 после извлечения участка SP3 профиля вспомогательная кривая 29 пересекает следующий участок SP3 профиля в точке 31. Данная ситуация требует коррекции части участков SP2 и SP3 профиля и замены их скорректированным участком SPc профиля, показанным на Фиг.6. Затем будет построена соответствующая вертикальная траектория TV на основе данного скорректированного участка SPc профиля.
В примере на Фиг.6:
- период t1 соответствует периоду извлечения участка SP2 профиля (поскольку летательный аппарат A уже находится на отрезке TR1);
- период t2 соответствует периоду вычисления отрезка TR2;
- период t3 соответствует периоду извлечения участка SP3 профиля; и
- период t4 соответствует периоду вычисления отрезка TR3.
Изобретение относится к области приборостроения и может найти применение для построения траектории полета на малой высоте для следования по ней летательного аппарата. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство (1) содержит набор (5) источников данных, первое средство (6) для определения латеральной траектории для траектории полета и второе средство (7) для определения вертикальной траектории для траектории полета. При этом упомянутое второе средство (7) определяет вертикальную траекторию во время полета летательного аппарата последовательно по мере выполнения полета, участок за участком. Элемент (14) предназначен для извлечения из базы данных (3) участка профиля. Элемент (15) предназначен для определения участка вертикальной траектории с использованием извлеченного участка профиля. Участок вертикальной траектории определяют на основании характеристик скороподъемности и снижения летательного аппарата, полученных из упомянутого набора (5) источников данных. 4 н. и 8 з.п. ф-лы, 6 ил.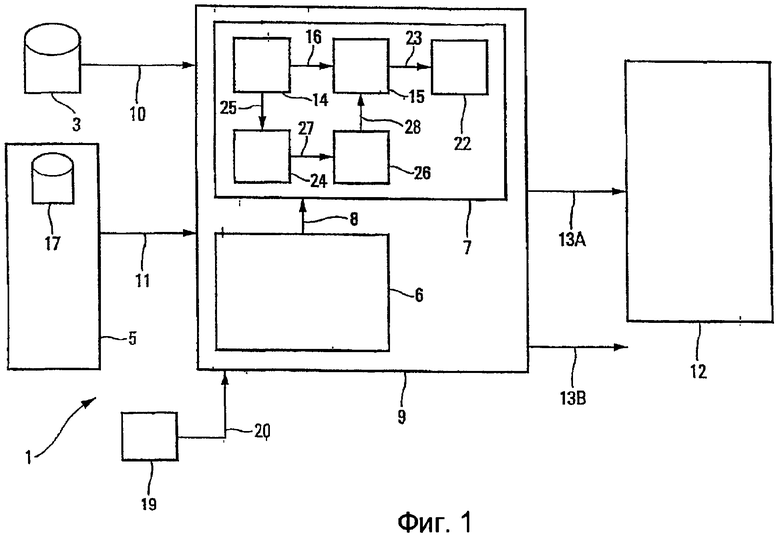
1. Способ построения траектории (ТО) полета на малой высоте для следования по ней летательного аппарата (А), в частности военно-транспортного самолета, при этом упомянутая траектория (ТО) полета содержит латеральную траекторию и вертикальную траекторию (TV), причем упомянутая вертикальная траектория (TV) определяется на основании профиля (РТ) местности, относящегося к местности (2), подлежащей пролету летательным аппаратом (А), таким образом, чтобы позволить упомянутому летательному аппарату (А) следовать упомянутой пролетаемой местности (2),
в котором упомянутую вертикальную траекторию (TV) траектории (ТО) полета определяют во время полета летательного аппарата (А) последовательным методом при полете, отрезок (TRi) за отрезком (TRi), причем для каждого отрезка (TRi) вертикальной траектории (TV):
участок (SPi) профиля, который относится к местности (2), подлежащей пролету согласно соответствующей латеральной траектории, извлекают из базы данных (3) местности, содержащей упомянутый профиль (РТ) местности; и
упомянутый отрезок (TRi) вертикальной траектории (TV) определяют на основании упомянутого участка (SPi) профиля, извлеченного упомянутым образом, в виде функции характеристик скороподъемности и снижения летательного аппарата (А).
2. Способ по п.1, в котором для определения упомянутой вертикальной траектории (TV) дополнительно определяют переходную траекторию (TLi) каждый раз между двумя последовательными отрезками (TRi, TRi+1) вертикальной траектории, при этом упомянутая переходная траектория (Li) характеризует возможность пролета от одного отрезка (TRi) до другого отрезка (TRi+1).
3. Способ по п.2, в котором упомянутую переходную траекторию (Li) определяют продолжением отрезка, который расположен выше в плоскости (РО) перехода двух последовательных отрезков (TRi, TRi+1) вертикальной траектории, к другому отрезку, вплоть до соединения с последним.
4. Способ по п.1, в котором выполняют проверку для подтверждения, совместим ли каждый участок (SPi) профиля, извлеченный из упомянутой базы данных (3), с максимальной характеристикой скороподъемности летательного аппарата (А), и, если обнаруживают несовместимость, соответствующий участок (SPi) профиля корректируют для устранения данной несовместимости, при этом участок профиля, скорректированный таким образом, применяют для определения соответствующего отрезка (TRi) вертикальной траектории.
5. Способ по п.1, в котором упомянутая латеральная траектория соответствует плану полета, обеспечиваемому пилотом летательного аппарата (А).
6. Способ по п.1, в котором упомянутая латеральная траектория определяется автоматическим прокладчиком маршрута летательного аппарата (А).
7. Устройство для построения траектории (ТО) полета на малой высоте для следования по ней летательного аппарата (А), в частности военно-транспортного самолета, при этом упомянутая траектория (ТО) полета содержит латеральную траекторию и вертикальную траекторию (TV), причем упомянутое устройство (1) содержит:
базу данных (3), содержащую профиль (РТ) местности, относящийся к местности (2), подлежащей пролету летательным аппаратом (А);
набор (5) информационных источников, способных выдавать, по меньшей мере, информацию, касающуюся летательного аппарата (А);
первое средство (6) для определения упомянутой горизонтальной траектории для траектории (ТО) полета; и
второе средство (7) для определения упомянутой вертикальной траектории (TV) для траектории (ТО) полета,
в котором упомянутое второе средство (7) выполнено таким образом, чтобы определять упомянутую вертикальную траекторию (TV) во время полета летательного аппарата (А) при полете, с выполнением данного определения отрезок (TRi) за отрезком (TRi), и упомянутое второе средство (7) содержит, по меньшей мере:
первый элемент (14) для извлечения из упомянутой базы данных (3), по меньшей мере, одного участка (SPi) профиля, который относится к местности (2), подлежащей пролету согласно соответствующей латеральной траектории; и
второй элемент (15) для определения отрезка (TRi) вертикальной траектории с помощью упомянутого участка (SPi) профиля, извлеченного упомянутым первым элементом (14), в виде функции характеристики скороподъемности и снижения летательного аппарата (А), происходящей из упомянутого набора (5) информационных источников.
8. Устройство по п.7, в котором упомянутое второе средство (7) дополнительно содержит третий элемент (22) для определения траектории (Li) перехода между двумя последовательными отрезками (TRi, TRi+1) вертикальной траектории, при этом упомянутая переходная траектория (Li) характеризует возможность пролета от одного отрезка до другого отрезка.
9. Устройство по п.7, в котором упомянутое второе средство (7) дополнительно содержит:
четвертый элемент (24) для подтверждения, совместим ли каждый участок (SPi) профиля, который извлечен упомянутым первым элементом (14), с максимальной характеристикой скороподъемности летательного аппарата (А); и
пятый элемент (26) для коррекции каждого участка (SPi) профиля, для которого обнаружена несовместимость упомянутым четвертым элементом (24), причем каждый участок профиля, скорректированный таким образом, используется упомянутым вторым элементом (15) для определения соответствующего отрезка (TRi) вертикальной траектории.
10. Устройство по п.7, в котором упомянутый набор (5) информационных источников содержит, по меньшей мере, одну базу данных (17), содержащую информацию, касающуюся характеристик скороподъемности и снижения летательного аппарата (А).
11. Летательный аппарат, содержащий устройство (1) по п.7.
12. Летательный аппарат, содержащий устройство (1) для реализации способа по п.1.
| ЕР 0775953 A1, 28.05.1997 | |||
| WO 2005069094 A, 28.05.2005 | |||
| Журавлев В.И., Иванов B.C | |||
| Безопасность полетов летательных аппаратов | |||
| - М.: Транспорт, 1986, с.105-115 | |||
| US 5922031 А, 13.07.1999 | |||
| US 3018049 А, 23.01.1962 | |||
| US 4144571 А, 13.03.1979 | |||
| Регулируемая тепловая труба | 1980 |
|
SU937963A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

