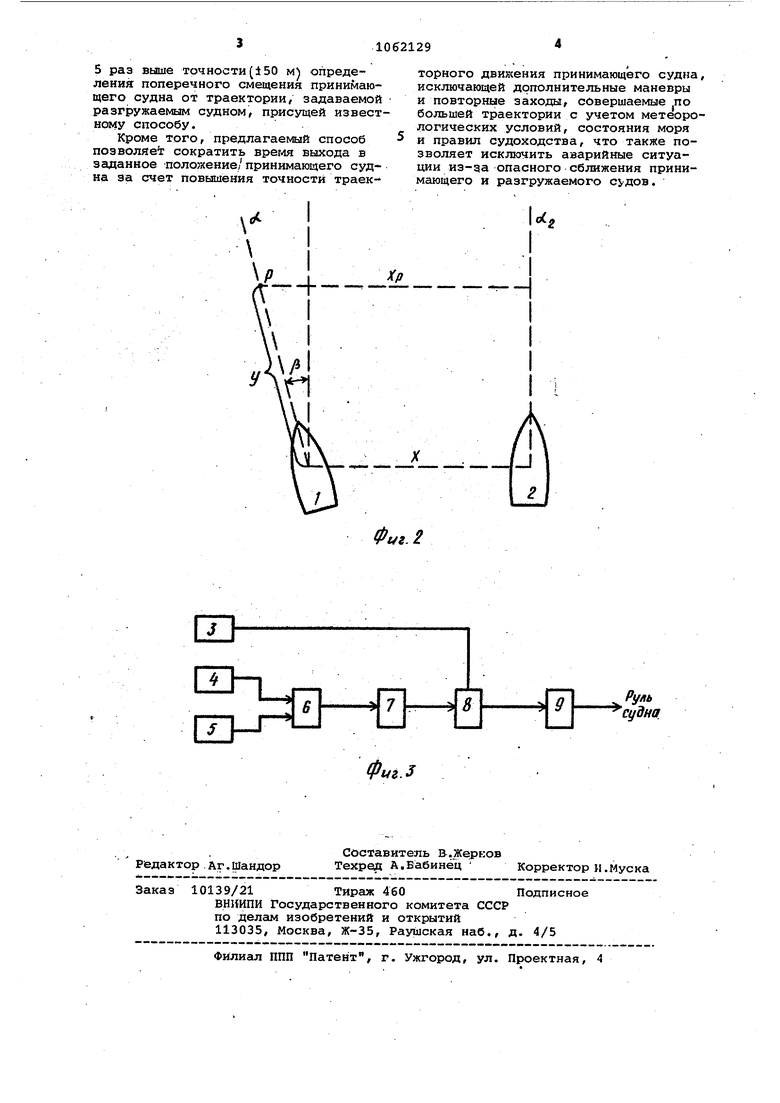
Изобретение относится к технике уп равления движущимся объектом, например, судном, управляемьпу по величине поперечного смещения от заданной траектории, и может быть использовано дня управления движением принимающим груз судном по поперечному смещению относитеньно траектории разгружаемого судна при грузопередаче. Известен способ управления траекторией движения судна преимущественно при траверз ной грузопередаче, осно ванной на перекладке руля по величине поперечного смещения принимающего груз судна от заданной траектории до центра управления fj , Недостатком известного способа являе тся то, что он не позволяет с требуемой точностью (110 м) и в заданное время обеспечить выход принимающего груз судна на траверз разгружавмого судна, исключив аварийную ситуацию, так как производится управление рулем судна по пересчетному поперечному смещению от заданной траектории до центра управления при этом замер текущего смещения объекта от заданной траектории осуществляется датчиком непосредственно от принимающего судна до разгружаемого судна задатчика траектории, что и определяет возможность такого управления только с момента выхода принимающего судна на траверз разгружаемого судна Использование существующих навига ционно-и мерительных, средств для измерения текущего значения поперечного смещения от разгружаемого судна (задатчика траектории) до выхода на его траверз невозможно из-за их непри емлемой погрешности. Целью изобретения является повыше ние точности и быстродействия выхода судна на заданное поперечное смещение от разгружаемого судна. Указанная цель достигается тем,что согласно способу управления траекторией движения судра-преимущественно при траверзной передаче груза, основанному на перекладке руля по величи не поперечного смещения.принимающего груз судна от заданной траектории до центра управления,измеряют поперечное смещение центра управления принимающего груз судна от гидродинамического следа разгружаемого судна, согласно которому формируют сигнал управления .по которому производят перекладку руля направления принимающего груз судна. На фиг.1 изображена схема совмест ного плавания двух судов при трайерз ной передаче груза на фиг.2 -схема управления после выхода одного судн на траверз другого во время грузопер цачи, на фиг.З - приборы управления судном и измерительные приборы. В случав совместного плавания двух судов при траверзной грузопередаче, (фиг.1) разгружаемое судно является з,адатчиком траектории движения для принимающего груз судна и любое изменение его движения по курсу влечет за собой изменение траекторий движе- ния принимающего груз судна. Взаимодействие судов, разгружаемого и принимающего груз, в процессе грузопере-. дачи включает не только грузопередачу, но и выход принимающего груз судна 1 на траверз разгружаемого судна 2. При этом принимающее груз судно 1 должно выйти на траверз разгружаемого судна 2, которое производит движение по заданному курсу, оставляя гидродинамический след. Впереди по курсу судна, прини- мающего груз на расстоянии от центра Ьращения, равным примерно 1,5 длины корпуса судна-У выбирают центр управления //Р. /3/ и /1/. Датчиком 3, например оптическим или акустическим,.измеряют X - текущее значение поперечного смещения судна 1 от гидродинамического следа судна 2. Датчиком 4 курса измеряют курсовой угол судна 1- . Курсовой угол гидродинамического следа судна 2tf0- определяют, например, оптическимпелеМга-. тором 5. Посредством сумматора б опре- деляют рассогласование этих углов у 2c6oi,-oCc iC. Затем блоком 7 умножения определяют приращение поперечного смещения судна 1- У Jf (справедливое при достаточно малых углах (у) . Тогда согласно зависимости Сумматором 8 определяют X р - поперечное смещение вынесенного вперед по курсу судна 1 центра управления /. /Р .от гидродинамического следа судна 2 и пропорционально этой величине посредством формирователя 9 формируют сигнал управления, по которому производят перекладку руля направления принимающего груз судна 1. Использование предлагаемого способа, по сравлению с известным/ позволяет обеспечить повьппание точности в 5 раз при управлении инерционными объектами - судами, при осуществлении выхода принимающего судна на траверз разгружаемого судна при траверзной грузопередаче. за счет повышения точности определен-ия траектории движения принимающего судна, формируемой относительно гидродк:намического следа разгружаемого cyднa путем определения измерительной аппаратурой поперечного смещения принимающего судна относительно гидродинамического следа с точностью не менее ilO м, что в
5 раз выше точности(150 м определения поперечного смещения принимающего судна от траектории, задаваемой разгружаемым судном, присущей известному способу.
Кроме того, предлагаемый способ позволяет сократить врег«1я выхода в заданное положение/принимающего судна за счет повышения точности траекторного движения принимающего судна, исключающей дополнительные маневры и повторные заходы, совершаемые по большей траектории с учетом метеорологических условий, состояния моря и правил судоходства, что также позволяет исключить аварийные ситуации из-за опасного сближения принимающего и разгружаемого судов.
и
И
J
Фиг. 2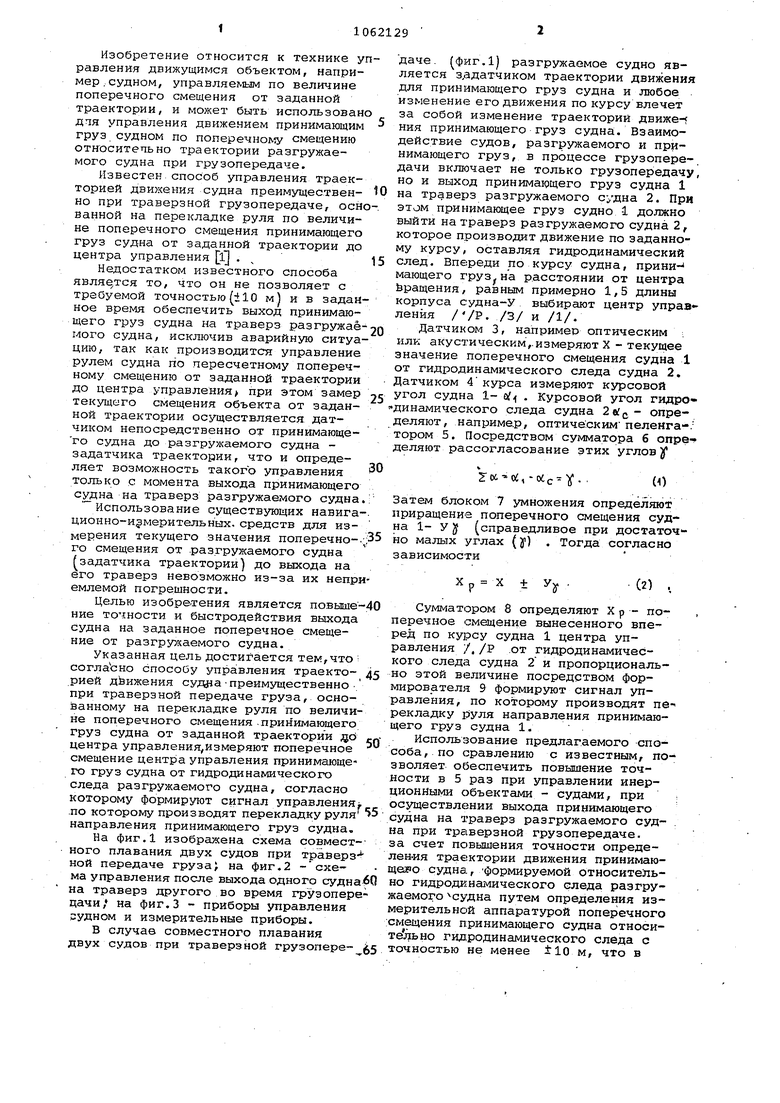
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления траекторией движения судна | 1980 |
|
SU908656A1 |
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
| Способ управления траекторией движения судна | 1978 |
|
SU724389A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| Способ управления траекторией движения судна | 1979 |
|
SU867786A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА преимущественно при траверэной грузопередаче, основанный на перекладке руля по величине поперечного смещения принимающего груз рудна от заданной траектории до .центра управления, отличающийс я тем, что, с целью повышения точности и быстродействия выхода судна на заданное поперечное смещение от разгружаемого судна, измеряют поперечное смещение центра управления принимающего груз Ъудна от гидродинами.ческого следа разгружаемого судна, согласно которому форм(}руют сигнал управления, по которому производят перекладку руля направления принимающего груз судна. Фи.1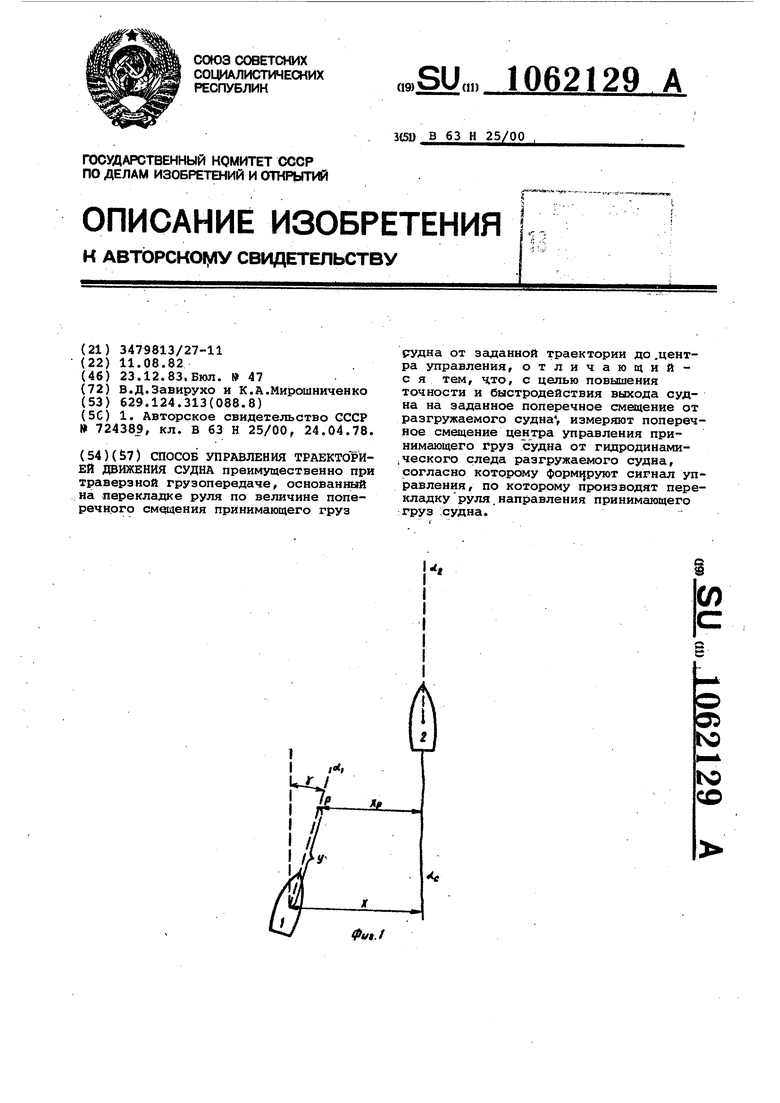
Руль судна
Фш.З
