Область техники, к которой относится изобретение
Настоящее изобретение относится к приводному устройству балансировочной машины для ротора, которое позволяет более точно измерить параметры балансировки роторов благодаря упрощенной конструкции приводного устройства. Более конкретно, изобретение относится к таким приводным устройствам, в которых приводной двигатель с приводным шкивом соединен последовательно на кронштейне так, чтобы двигаться вверх и вниз. Пара шарнирных блоков, соединенных друг с другом посредством шарнирного вала, установлена с возможностью вращения на верхней стороне кронштейна соответственно так, что шарнирный вал расположен на той же осевой линии, что и приводной шкив. Регулируемый шкив установлен с одной стороны шарнирного вала, что позволяет движение вверх и вниз. Пара пальцев, снабженная взаимодействующими шкивами, соответственно установлена таким образом, чтобы быть симметричными относительно оси приводного шкива. Ремень наматывают вокруг каждого шкива. Все это позволяет более точное измерение балансировки ротора.
Предшествующий уровень техники
В общем, как показано на фиг.1, ротор, действующий как вращающее устройство, установленное внутри двигателя, содержит множество сердечников 3, уложенных рядами на вращающийся вал 2, коллектор 4, установленный на одной стороне вращающегося вала 2 и обмотку 5, намотанную на сердечник 3, с концами, соединенным с коллектором 4. Весовая балансировка ротора такой конструкции является важным фактором рабочих характеристик двигателя.
Равномерное распределение веса ротора является критическим для предотвращения явления импеданса высокоскоростного вращения, сопровождающегося неравномерным вращением, вибрацией и шумом, связанными с ним.
Поэтому процесс измерения баланса с использованием балансировочной машины для ротора обычно включен в единый процесс производства ротора. Фиг.2 представляет собой схематичный вид в вертикальном разрезе обычной балансировочной машины для ротора. Со ссылкой на фиг.2 описана конструкция обычных балансировочных машин для роторов. Обычная балансировочная машина для ротора включает в себя: ремень 30 для передачи крутящего момента приводного двигателя 22 к внешней периферийной поверхности сердечника 3 ротора 1; приводное устройство 20 ротора, имеющее ряд шкивов с ремнем 30, намотанным вокруг них; пару V-образных блоков для поддержания вращающегося вала 2 ротора 1 с обоих торцов и общее измерительное устройство 14, такое как пьезоэлектрический элемент или движущийся датчик катушки для определения вибрации ротора 1, передаваемой с V-образного блока, что обеспечивает устройство измерения баланса 10.
С другой стороны, в обычных балансировочных машинах для ротора, имеющих устройство 10 измерения баланса и устройство 20 привода ротора, используются различные способы для привода ротора, как показано на фиг.3 (3А-3Д). Среди них - способ приводного ремня, имеющий замкнутую с двух сторон D-образную петлю, наиболее часто использующийся в автоматическом машиностроении.
Этот способ позволяет легко измерить работу замещения ротора, и благодаря большому моменту инерции, возникающему за короткий период, достигается измерительная скорость баланса в стабильном диапазоне, что приводит к быстрым измерениям баланса ротора. К тому же ремень наматывается, оборачивая обе стороны ротора, обеспечивая тем самым широкую зону контакта и позволяя таким образом устойчивое и точное измерение без вибрации.
Как один из примеров иллюстрации вышеописанного способа показана конструкция обычного приводного устройства 20 балансировочной машины для ротора, которая описана более подробно со ссылкой на фиг.4. А именно, приводной двигатель 22 с присоединенным приводным шкивом устанавливается на одну сторону кронштейна 21. На торцах верхней части кронштейна 21 установлены взаимодействующие шкивы 34а и 34b и образована пара пальцев 24а и 24b, изменяемых в зависимости от диаметра сердечника 3 ротора 1. Механизм 25 регулирования натяжения снабжен дополнительными взаимодействующими шкивами 35, и другое множество взаимодействующих шкивов образовано в требуемых положениях кронштейна 21, а ремень 30 обматывают вокруг каждого шкива 27, 28, 32, 34а и 35. На чертежах необъясненная ссылочная позиция «С» обозначает виртуальную ось ротора.
Раскрытие изобретения
Техническая проблема
Однако, как описано выше, в обычных приводных устройствах балансировочной машины для ротора приводной двигатель 22 установлен с одной стороны кронштейна 21, что делает весь приводной механизм 20 не симметричным относительно виртуальной оси ротора. Эта асимметрия приводного устройства означает, что длина участка ремня 30, намотанного через шкивы, зона контакта ремня с каждым шкивом 27, 28, 32, 34а, 34b и 35, и сила натяжения ремня, и центробежная сила участка ремня 30 прилагаются неравномерно. Описанная выше конструкция обычного приводного устройства 20 вызывает незначительные отклонения в роторе, что не требуется при высокой степени точности. Принимая во внимание необходимость создания роторов высокой точности, широкую область применения таких роторов и быстрое развитие технологий, обычный приводной механизм 20 балансировочной машины для ротора имеет множество проблем, которыми нельзя пренебречь при производстве более точного ротора. Например, обычное приводное устройство 20 балансировочной машины для ротора имеет относительно большее количество шкивов и более длинный ремень 30. Следовательно, это вызывает шум и вибрацию от шкивов и ремня. К тому же длина ремня, соприкасающаяся с правой и левой рабочей сторонами внешней поверхности периметра сердечника 3 ротора 1, различается так, что натяжение прилагается неравномерно и, следовательно, равномерное вращательное усилие не может быть передано.
Более того, в описанном выше приводном устройстве балансировочной машины для ротора 20 сила натяжения, приложенная к ремню 30, изменяется с изменением диаметра сердечника 3 ротора 1, баланс которого измеряется. Также изменяется натяжение в соответствии с работой пальцев 24а, 24b, которые связаны с работой замещения ротора. Вышеуказанное меняющееся натяжение компенсируется средством регулирования натяжения 25 с упругой частью, такой как предусмотренная в ней пружина (не показана). Конструкция средства регулирования натяжения 25 описана более подробно. Что касается его действия, средство регулирования натяжения 25 должно компенсировать увеличение силы натяжения при раздвижении пальцев 24а и 24б. Понятно, однако, что сам по себе ремень 30, намотанный через отрезок между обеими сторонами сердечника 3 ротора 1, и средство регулирования натяжения 25 должны в некоторой степени поглощать силу натяжения и таким образом упругий ремень 30 немного натягивается до того, как средство регулирования натяжения 25 может сработать. Как описано выше, тот факт, что средство регулирования натяжения 25 воспринимает силу натяжения через ремень 30, означает, что натяжение, прилагаемое к ремню 30, не поддерживается в оптимальном состоянии, а изменяется со сменой диаметра сердечника 3 ротора 1. Поэтому нельзя достичь более точного измерения баланса ротора.
Техническое решение
Настоящее изобретение было создано с целью решить проблемы предшествующего уровня техники, и таким образом задачей изобретения является создание приводного устройства балансировочной машины для ротора, в котором приводной двигатель установлен на одной оси с ротором, шарнирный блок, шарнирно соединенный шарнирным валом, установлен на средстве установки пальцев кронштейна таким образом, что шарнирный вал расположен на одной оси с приводным двигателем, а приводной шкив установлен на одной стороне с шарнирным валом, причем палец снабжен взаимодействующим шкивом, установленным симметрично относительно оси приводного двигателя, и поэтому ремень намотан вокруг каждого шкива так, что конструкция приводного двигателя может быть упрощена, и, следовательно, уменьшена длина ремня и снижена вибрация ремня, таким образом позволяя поддерживать натяжение ремня в оптимальном режиме вследствие того, что натяжение ремня симметрично относительно оси ремня, а также регулируемого шкива, т.е. средство регулирования натяжения не управляется ремнем.
Полезные эффекты
Приводное устройство балансировочной машины для ротора согласно изобретению позволяет упростить конструкцию приводного устройства до минимума так, что участок длины намотанного между шкивами ремня может быть уменьшен, минимизируя таким образом вибрацию и провисание ремня. Кроме того, во время измерения баланса может быть улучшена функция автоматической остановки ротора. В целом конструкция приводного устройства сконструирована таким образом, чтобы быть симметричной относительно виртуальной оси ротора или чтобы их оси совпадали. Поэтому зона контакта между шкивом и ремнем, сила натяжения и центробежная сила участка ремня прилагаются равномерно, что позволяет ротору вращаться непрерывно, таким образом обеспечивая стабильное измерение баланса. Более того, баланс ротора, имеющего различные диаметры, может быть измерен посредством первичной и вторичной компенсации изменения натяжения. Первичная компенсация натяжения не действует на ремень, наоборот натяжение ремня поддерживается в оптимальном состоянии так, что может быть достигнуто более точное измерение баланса ротора, следовательно, в результате чего получается ротор или двигатель высокого качества, обладающий дополнительными достоинствами.
Краткое описание чертежей
Дополнительные задачи и преимущества изобретения можно лучше понять из следующего подробного описания, в сочетании с прилагаемыми чертежами, на которых:
фиг.1 представляет собой вид в перспективе обычного ротора;
фиг.2 представляет собой схематичный вертикальный разрез обычной балансировочной машины для ротора;
фиг.3A-3D представляют собой виды различных приводных ремней приводных устройств;
фиг.4 представляет собой вид сбоку приводного устройства обычной балансировочной машины для ротора;
фиг.5-11 представляют собой конструкцию и процесс сборки приводного устройства балансировочной машины для ротора согласно изобретению;
фиг.12 и 13 представляют собой виды в перспективе приводного устройства балансировочной машины для ротора согласно изобретению;
фиг.14 представляет собой рабочее состояние приводного устройства балансировочной машины ротора согласно изобретению.
Предпочтительный вариант осуществления изобретения
Предпочтительные варианты осуществления настоящего изобретения будут описаны ниже подробно со ссылкой на прилагаемые чертежи.
Со ссылкой на фиг.5 и 6 показаны виды в перспективе кронштейна приводного устройства согласно изобретению, иллюстрирующие конструкцию кронштейна приводного устройства согласно изобретению. Кронштейн 60 приводного устройства согласно изобретению содержит основание 61, имеющее множество установочных отверстий 62, образованных в нем для установки управляющего устройства на балансировочную машину, корпус 63, имеющий сквозное отверстие овальной формы, образованное в его центре, и регулировочный болт 64 на его верхнем торце перпендикулярно основанию 61, и средство 68 установки пальцев, выполненное за одно целое с верхней частью корпуса 63.
Со ссылкой на фиг.7, 8 и 9 подробно описан процесс установки приводного двигателя 70, который устанавливается на кронштейн 60. На одной стороне корпуса 63 кронштейна 60 установлена пара направляющих 66, к которым прикрепляется ползун 67. Пластина 71 с установленным на ней приводным двигателем 70 крепится к ползуну 67. Пара пружин растяжения, верхняя и нижняя, 73а и 73b соединена с пластиной 71 и обеими сторонами корпуса 63 кронштейна 60 для того, чтобы приводной двигатель 70 мог перемещаться вверх и вниз под действием упругой силы пружин. Вращающийся вал приводного двигателя 70 установлен вместе с приводным шкивом 75 последовательно и проходит через установочное отверстие 65.
Со ссылкой на фиг.6 и 7 описана соединительная конструкция шарнирных блоков 80а и 80b и регулируемого шкива 85. Средство 68 установки пальцев выполнено за одно целое с верхней частью корпуса 63 кронштейна 60 с приводным двигателем 70, установленным на нем.
Пара шарнирных блоков 80а и 80b, соединенных друг с другом пружиной 89 растяжения, установлена с возможностью вращения на средстве 68 установки пальцев посредством центрального вала 86 и крепежного болта 87. На каждой лицевой поверхности шарнирных блоков 80а и 80b выполнены отверстия для установки шарниров 81а и 81b. Шарнирный вал 83 и шарнирный болт 84 соединяются с блоками. Головка болта 84 устанавливается в направляющую канавку 69, которая образована на средстве 68 установки пальцев кронштейна 60. С одной стороны шарнирного вала 83 устанавливается и крепится регулируемый шкив 85, а с другой стороны устанавливается шарнирный болт. Регулируемый шкив 85 расположен на верхней стороне той же центральной оси приводного шкива 75, который крепится к приводному двигателю 70.
В то же время на одной стороне шарнирного блока 80b выполняется монтажный выступ 82. Магнит 100 вставляется в верхнюю часть монтажным выступом 82 для фиксации измерительного блока 110. С одной стороны средства 68 установки пальцев устанавливается опорный кронштейн 105, выступающий в направлении верхней стороны фиксированного измерительного блока 110 и контактирующий с ней. Необъясненная на фигуре ссылочная позиция 88 обозначает втулку 88, которая обеспечивает пространство между шарнирными блоками 80а и 80b и средством 68 установки пальцев.
Со ссылкой на фиг.12 и 13 описана конструкция пары пальцев 90а и 90b и средство приведения в действие пальцев. Пара симметричных пальцев 90а и 90b соединена соответственно с парой шарнирных блоков 80а и 80b, которые устанавливаются на средство 68 установки пальцев кронштейна 60. На конце каждого пальца 90а и 90b установлены взаимодействующие шкивы 95а и 95b соответственно. Пара пальцев 90а, 90b выполнена таким образом, чтобы быть симметричными относительно виртуальной оси приводного шкива 75, установленного на приводной двигатель 70. Пальцы 90а и 90b приводятся в действие пневматическим цилиндром 98, который установлен на одной стороне корпуса 63 кронштейна 60. А именно, монтажный выступ 82, выполненный с одной стороны шарнирного блока 80b, соединяется с соединительным стержнем 99 пневматического цилиндра, приводя в действие таким образом пару пальцев 90а и 90b.
Кроме того, на каждый из шкивов 75, 85, 95а и 95b приводного устройства 50 намотан ремень 55 (фиг.14). Далее подробно со ссылками на фиг.14 описана работа приводного устройства балансировочной машины для ротора согласно настоящему изобретению, сконструированного, как описано выше. Приводной двигатель 70 расположен на той же оси «С» ротора 1, от которой измеряется баланс. Пара пальцев 90а и 90b, взаимодействующие шкивы 95а и 95b, регулируемый шкив 85 и приводной шкив 75 расположены на той же оси «С» ротора 1 или сконструированы таким образом, чтобы быть симметричными относительно оси «С». Следовательно, длина каждого участка ремня 55, намотанного между каждым шкивом, зона поверхности контакта ремня 55 и каждого шкива являются равными, а сила натяжения и центробежная сила участка ремня 55 прилагаются равномерно. Кроме того, натяжение ремня 55, соприкасающегося с обеими боковыми поверхностями сердечника ротора 1, воздействует равномерно так, что ротор может вращаться более стабильно и равномерно, а передающая дорожка ремня 55 сводится к минимуму. Ремень 55 может быть относительно короче, что позволяет минимизировать вибрацию ремня 55 и достичь более точного измерения весового баланса ротора 1 по сравнению с обычным, что таким образом позволяет получить ротор и двигатель высокого качества с дополнительными достоинствами.
Кроме того, приводное устройство балансировочной машины для ротора согласно настоящему изобретению сконструировано так, что в случае изменения натяжения ремня 55 из-за раздвижения пальцев 90а и 90b в процессе измерения балансировки ротора, имеющего больший диаметр, или при замене ротора, изменяющееся натяжение компенсируется регулируемым шкивом 85. В отличие от обычного способа, использующего управление ремнем 55, регулируемый шкив 85 перемещается вверх и вниз под воздействием шарнирных блоков 80а и 80b. Когда пара пальцев 90а и 90b отдаляется друг от друга, регулируемый шкив 85 перемещается вверх благодаря движению шарнирного вала 83 и компенсирует изменение натяжения ремня 55. Когда пальцы 90а и 90b возвращаются в первоначальное положение, регулируемый шкив 85 перемещается вниз благодаря движению шарнирного вала 83 и таким образом действие шарнирных блоков 80а, 80b и пальцев 90а, 90b компенсирует натяжение, не задевая ремень 55, который контактирует с сердечником ротора. Следовательно, натяжение ремня 55 может поддерживаться на оптимальном уровне, несмотря на диаметр сердечника ротора 1.
Кроме того, в случае, когда изменение натяжения выходит за границы первичного лимита компенсации регулируемого шкива 85, приводной шкив 75 перемещается вверх и вниз для того, чтобы таким образом компенсировать изменение натяжения. Приводной шкив 75 соединен последовательно с приводным двигателем 70, а приводной двигатель 70 установлен при помощи пластины 71 на ползун 67, который соединен с направляющей 66. Пластина 71 перемещается вверх и вниз под действием восстанавливающей силы пары пружин 73а и 73b растяжения, расположенных на верхней и нижней частях с обеих сторон пластины 71. Поэтому натяжение ремня 55 может компенсироваться повторно и может быть достигнут широкий ряд совместимости диаметров ротора 1 (фиг.7, 8 и 9). Желательно оптимизировать вес приводного двигателя 70 и приводного шкива 75, упругую силу каждой пружины 73а и 73b натяжения и натяжение ремня 55 так, чтобы приводной двигатель 70 можно было расположить по центру овального установочного отверстия 65, образованного в корпусе 63 кронштейна 60 для того, чтобы он мог перемещаться вверх и вниз.
С другой стороны, пара пальцев 90а и 90b раздвигается равномерно под действием пневматического цилиндра 98 и восстанавливается от пружины 89 натяжения, соединяющей пару шарнирных блоков 80а и 80b. Регулированием глубины установки регулируемого болта 64, установленного на верхнем торце корпуса 63, ограничивается точка опускания шарнирных блоков 80а и 80b, что, в свою очередь, создает начальную установку рабочего диапазона пальцев 90а и 90b. Кроме того, в зависимости от диаметра ротора 1 измерительный блок 110, имеющий различные диаметры, фиксируется на магнит 100 (фиг.10, 11), установленный с одной стороны шарнирного блока 80а. Следовательно, рабочий диапазон пальцев 90а и 90b ограничен измерительным блоком 110, расположенным на монтажном выступе 82, и опорным кронштейном 105, расположенным в верхней части измерительного блока 110. Более того, в случае ротора с большим диаметром натяжение ремня 55 может поддерживаться постоянно. Таким образом, рабочий диапазон механизма может быть минимизирован, а операционное время может быть эффективно снижено в аспекте управления производством.
Для достижения вышеобозначенных задач в соответствии с одним вариантом изобретения обеспечивают приводное устройство балансировочной машины для ротора, в котором на кронштейне установлены ремень для передачи мощности от приводного двигателя к внешней периферийной поверхности сердечника ротора и множество шкивов, обмотанных ремнем. В приводном устройстве балансировочной машины для ротора к одной стороне кронштейна 60, имеющего установочное отверстие 65, прикреплена пара направляющих 66 с присоединенным к ним ползуном 67. Приводной двигатель 70, соединенный последовательно с приводным шкивом 75, проходящим через установочное отверстие 65, крепится к ползуну 67 с пластиной 71. Пара верхних и нижних пружин растяжения присоединена к пластине 71 и обеим сторонам кронштейна 60. Пара шарнирных блоков 80а и 80b, соединенных друг с другом пружинами 89 растяжения, установлена на верхнюю сторону кронштейна 60 с возможностью вращения. Каждый из шарнирных блоков 80а и 80b шарнирно соединен с шарнирным валом 83 и шарнирным болтом 84 таким образом, что шарнирный вал 83 расположен на той же осевой линии, что и приводной шкив 75, а регулируемый шкив 85 установлен на торце вала. Шарнирный болт 84 устанавливается в направляющую канавку 69, образованную в верхней части кронштейна 60. Пара пальцев 90а и 90b, каждый из которых имеет взаимодействующие шкивы 95а и 95b соответственно, установлена на паре шарнирных блоков 80а и 80b соответственно таким образом, чтобы быть симметричными относительно виртуальной оси приводного шкива 75. Кронштейн 60 снабжен пневматическим цилиндром 98, закрепленным на монтажном выступе 82, который выполнен на одной стороне шарнирного блока 80b. Ремень 55 намотан на шкивы 75, 85, 95а и 95b.
В одном предпочтительном варианте осуществления регулировочный болт 64 соединен с верхним торцом кронштейна 60, где нижние концы шарнирных блоков 80а и 80b входят в контакт.
В другом предпочтительном варианте осуществления магнит 100 установлен в верхней части монтажного выступа 82 одного шарнирного блока 80b. Измерительный блок 110 зафиксирован на магните 100 таким образом, что он опирается на монтажный выступ 82, а на одной стороне средства 68 установки пальцев установлен опорный кронштейн 105, выступающий в сторону верхней части измерительного блока 110.
Промышленная применимость
Как описано выше, в соответствии с управляющим устройством балансировочной машины для ротора согласно изобретению конструкция приводного устройства может быть упрощена до минимума так, что участок длины намотанного между шкивами ремня может быть уменьшен, уменьшая таким образом вибрацию и провисание ремня. Кроме того, во время измерения баланса может быть улучшена функция автоматической остановки ротора. В целом конструкция приводного устройства выполнена таким образом, чтобы быть симметричной относительно виртуальной оси ротора или чтобы их оси совпадали. Поэтому зона контакта между шкивом и ремнем, сила натяжения и центробежная сила участка ремня прилагаются равномерно, что позволяет непрерывное вращение ротора, таким образом обеспечивая стабильное измерение баланса. Более того, баланс ротора, имеющего различные диаметры, может быть измерен посредством первичной и вторичной компенсации изменения натяжения. Первичная компенсация натяжения не действует на ремень, наоборот натяжение ремня поддерживается в оптимальном состоянии так, что может быть достигнуто более точное измерение баланса ротора, следовательно, в результате получается ротор или двигатель высокого качества, обладающий дополнительными достоинствами.
В то время как настоящее изобретение описано со ссылкой на частные иллюстративные варианты, оно не ограничивается ими, а только прилагаемой формулой изобретения. Специалистам в данной области техники ясно, что они могут изменить или модифицировать варианты, не отступая от объема и сущности настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ СОЕДИНИТЕЛЬНАЯ СИСТЕМА ДЛЯ ДИАГНОСТИЧЕСКОГО ЗОНДА | 2010 |
|
RU2551107C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2011 |
|
RU2520895C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ ВАГОН С СИСТЕМОЙ РЕГУЛИРОВАНИЯ СКОРОСТИ ВЫГРУЗКИ | 2004 |
|
RU2380251C2 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2631062C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ КОРРЕКЦИИ ПОЛОЖЕНИЯ ДИСБАЛАНСА И КОРРЕКЦИИ ВЕЛИЧИНЫ ДИСБАЛАНСА НА БАЛАНСИРОВОЧНОМ СТАНКЕ | 2002 |
|
RU2294046C2 |
| ВЕТРОЗАЩИТНЫЙ ЭКРАН ДЛЯ ВЕСОВ | 2019 |
|
RU2800792C1 |
| Привод балансировочного станка | 1984 |
|
SU1508115A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ | 2003 |
|
RU2302569C2 |
| ПРИВОД | 1999 |
|
RU2238193C2 |
| Станок для балансировки роторов | 1981 |
|
SU983477A1 |
Изобретение относится к области электротехники, а именно к особенностям конструктивного выполнения балансировочных устройств для роторов. Сущность изобретения состоит в том, что в приводном устройстве балансировочной машины для ротора приводной двигатель установлен на той же оси, что и ротор, шарнирный блок, шарнирно соединенный шарнирным валом, установлен на средстве установки пальцев основного кронштейна таким образом, что шарнирный болт расположен на одной оси с приводным двигателем, регулируемый шкив установлен с одной стороны шарнирного вала, а палец с взаимодействующим шкивом установлен симметрично относительно оси приводного двигателя, при этом ремень обматывают вокруг каждого шкива, что обеспечивает упрощение конструкции приводного двигателя и позволяет уменьшить длину ремня и его вибрацию, тем самым позволяя поддержать приложенное к ремню натяжение на оптимальном уровне благодаря тому, что напряжение ремня симметрично относительно оси ремня и регулируемого шкива. Таким образом, средство регулирования натяжения работает не от ремня. Технический результат - упрощение приводного устройства при одновременном обеспечении улучшения функции остановки ротора и более точного измерения баланса ротора, что, в свою очередь, обеспечивает высокое качество ротора и двигателя в целом. 2 з.п. ф-лы, 14 ил.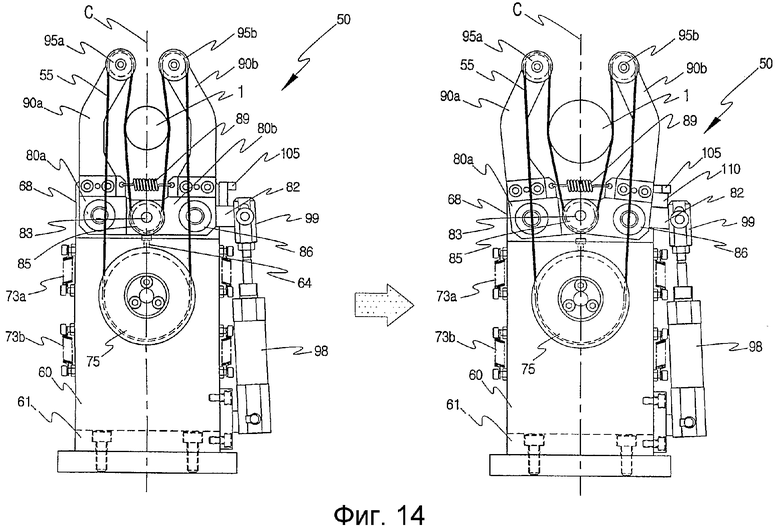
1. Приводное устройство балансировочной машины для ротора, в котором ремень для передачи силы вращения приводного двигателя к внешней периферийной поверхности сердечника ротора и множество шкивов с ремнем, намотанным вокруг них, установлены на кронштейне, в котором пара направляющих (66) с присоединенным ползуном (67) установлены на одной стороне кронштейна (60), имеющего установочное отверстие (65), образованное в нем;
в котором приводной двигатель (70), соединенный последовательно с приводным шкивом (75), проходящим через установочное отверстие 65, прикреплен к ползуну (67) с пластиной (71), а пара верхних и нижних пружин (73а) и (73b) натяжения соединена с пластиной (71) и обеими сторонами кронштейна (60);
в котором пара шарнирных блоков (80а) и (80b), соединенных друг с другом пружиной (89) натяжения, установлена с возможностью вращения на верхней стороне кронштейна (60), причем каждый шарнирный блок (80а) и (80b) шарнирно соединен с шарнирным валом (83) и шарнирном болтом (84) таким образом, что шарнирный вал (83) расположен на той же оси, что и приводной шкив (75), а регулируемый шкив (85) установлен на торце вала, при этом шарнирный болт (84) установлен в направляющую канавку (69), образованную в верхней части кронштейна (60);
в котором пара пальцев (90а) и (90b), каждый из которых имеет взаимодействующие шкивы (95а) и (95b), соответственно установлена в паре шарнирных блоков (80а) и (80b) соответственно таким образом, чтобы они были симметричны относительно виртуальной оси приводного шкива (75), а пневматический цилиндр (98), установленный на кронштейне (60), закреплен на монтажном выступе (82), образованном на стороне шарнирного блока (80b); и
в котором ремень (55) намотан вокруг шкивов (75), (85), (95а) и (95b).
2. Приводное устройство по п.1, в котором регулировочный болт (64) соединен с верхним торцом кронштейна (60), где нижние концы шарнирных блоков (80а) и (80b) входят в контакт.
3. Приводное устройство по п.1, в котором магнит (100) установлен на верхней стороне монтажного выступа (82), образованного на одной стороне шарнирного блока (80b), причем измерительный блок (110) зафиксирован на магните (100) таким образом, что он опирается на монтажный выступ (82), а опорный кронштейн (105), выступающий к верхней стороне измерительного блока (110), установлен с одной стороны средства (68) установки пальцев.

