Изобретение относится к области радионавигации и предназначено для точного определения вектора состояния (пространственных координат, составляющих вектора скорости и времени) различных потребителей по сигналам спутниковых радионавигационных систем (СРНС) ГЛОНАСС и GPS.
Известны цифровые приемники сигналов спутниковых радионавигационных систем ГЛОНАСС и GPS, предназначенные для определения вектора состояния объектов, описанные в патенте США № 5192957, МПК G01S 5/14, НКИ 342/357.12, опуб. 09.03.1993 г. и содержащие антенну, радиоприемную часть, блок цифровой обработки сигналов и процессор. Часть цифровой обработки сигналов реализуется аппаратными средствами (в корреляторе), а другая часть реализуется в цифровых процессорах - сигнальном и навигационном. При этом в сигнальном процессоре реализуются алгоритмы слежения за параметрами навигационных сигналов (задержкой и фазой) (первичная обработка сигналов) и выделение из принятых сигналов навигационной информации, а в навигационном процессоре реализуются алгоритмы расчета вектора состояния (пространственных координат, составляющих вектора скорости и времени) потребителя (вторичная обработка данных).
Недостатком таких цифровых приемников спутниковых радионавигационных систем является то, что при расширении числа параллельных каналов приема сигналов навигационных спутников одной или нескольких спутниковых радионавигационных систем необходимо разрабатывать новую аппаратную часть, а использование двухэтапной процедуры обработки сигналов и данных ограничивает достижимую точность и надежность измерения вектора состояния потребителя.
Наиболее близким к предлагаемому изобретению является цифровой приемник сигналов спутниковых радионавигационных систем GPS, описанный в патенте РФ №2140090, МПК6 G01S 1/30, опубл. 20.10.1999 г. Приемник содержит антенну, радиоприемный блок и микрокомпьютер, функционально реализующий коррелятор, измеритель радионавигационных параметров сигналов, измеритель вектора состояния потребителя, декодер навигационной информации, блок назначения на каналы, блок управления коррелятором и измеритель загрузки процессора. Антенна цифрового приемника предназначена для приема сигналов, излучаемых навигационными спутниками радионавигационной системы GPS. Выход антенны соединен с входом радиоприемного блока, в котором осуществляется усиление принятых сигналов, понижение частоты несущего колебания, предварительная частотная селекция от помех и преобразование входной смеси сигналов и помех в цифровую форму. С выхода радиоприемной части цифровые коды поступают на вход микрокомпьютера, где на первом этапе обработки осуществляется слежение за задержками и фазами сигналов тех навигационных спутников, которые выбраны блоком назначения на каналы, формирование оценок псевдозадержек и псевдодоплеровских частот данных сигналов и выделение навигационных данных из принятых сигналов, а на втором этапе обработки, используя сформированные оценки псевдозадержек и псевдодоплеровских частот и выделенные навигационные данные, вычисляются пространственные координаты, составляющие вектора скорости и текущее время, т.е. вычисляется вектор состояния объекта.
Однако такой цифровой приемник имеет двухэтапную схему обработки сигналов и данных и обрабатывает сигналы только одной СРНС GPS, что ограничивает характеристики точности и надежности координатно-временного обеспечения (КВО) потребителя.
Технической задачей изобретения является повышение точности и надежности координатно-временного обеспечения потребителя при одноэтапной схеме обработки сигналов всех видимых навигационных спутников.
Это достигается тем, что известный цифровой приемник спутниковых радионавигационых систем, содержащий последовательно соединенные антенну, радиоприемный блок и процессор, включающий многоканальный коррелятор, измеритель вектора состояния, декодер навигационной информации и блок назначения на каналы, причем радиоприемный блок содержит первый конвертор, вход которого является входом радиоприемного блока, опорный генератор, синтезатор частот и блок цифровой обработки, выход которого является выходом радиоприемного блока и одновременно входом процессора, каждый канал многоканального коррелятора содержит последовательно соединенные перемножитель и интегратор со сбросом, выход которого является выходом канала многоканального коррелятора и одновременно является одним из выходов многоканального коррелятора, генератор псевдослучайной последовательности, выход которого соединен с вторым входом перемножителя, первый вход которого является входом канала многоканального коррелятора и одновременно является входом многоканального коррелятора, генератор гармонического сигнала, выход которого соединен с третьим входом перемножителя, снабжен блоком вычисления параметров опорных сигналов, второй выход радиоприемного блока соединен с вторым входом многоканального коррелятора, причем второй вход многоканального коррелятора соединен одновременно с вторым входом процессора, которые соединены соответственно с первым и вторым выходами радиоприемного блока, в котором дополнительно введены второй и третий конверторы, выход опорного генератора соединен с входом синтезатора частот, первый, второй, третий и четвертый выходы которого соединены соответственно с вторыми входами первого, второго и третьего конверторов и с третьим входом блока цифровой обработки, первый и второй выходы первого конвертора соединены соответственно с первыми входами второго и третьего конверторов, выходы которых соединены соответственно с первым и вторым входами блока цифровой обработки, многоканальный коррелятор выполнен в виде 6N идентичных по структуре каналов, где N - целое число и выбрано из соотношения 4≤N≤24, первые входы перемножителей для первых 3N каналов многоканального коррелятора соединены между собой и являются первыми входами этих каналов, а также являются первым входом многоканального коррелятора, первые входы перемножителей для других 3N каналов многоканального коррелятора соединены между собой и являются первыми входами этих каналов, а также являются вторым входом многоканального коррелятора, первые входы генератора псевдослучайной последовательности и генератора гармонического сигнала каждого канала многоканального коррелятора соединены между собой и вторым входом канала многоканального коррелятора, который соединен с одним из входов третьего N-канального входа многоканального коррелятора, второй вход генератора псевдослучайной последовательности каждого канала многоканального коррелятора соединен с третьим входом канала многоканального коррелятора, который является одним из входов четвертого N-канального входа многоканального коррелятора, второй вход генератора гармонического сигнала каждого канала многоканального коррелятора соединен с четвертым входом канала многоканального коррелятора, являющимся одним из входов пятого N-канального входа многоканального коррелятора, выходы 4N каналов и выходы других 2N каналов многоканального коррелятора соединены соответственно с первым 4N-канальным и вторым 2N-канальным выходами многоканального коррелятора, которые соединены соответственно с первым 4N-канальным и вторым 2N-канальным входами измерителя вектора состояния потребителя, второй 2N-канальный выход многоканального коррелятора соединен с первым 2N-канальным входом декодера навигационной информации и 2N-канальным входом блока назначения на каналы, N-канальный выход которого соединен с вторым N-канальным входом декодера навигационной информации, третьим N-канальным входом измерителя вектора состояния потребителя, третьим N-канальным входом многоканального коррелятора и первым N-канальным входом блока вычисления параметров опорных сигналов, первый и второй N-канальные выходы которого соединены соответственно с четвертым и пятым N-канальным входами многоканального коррелятора, первый N-канальный выход декодера навигационной информации соединен с вторым N-канальным входом блока вычисления параметров опорных сигналов, а его второй N-канальный выход соединен с четвертым N-канальным входом измерителя вектора состояния потребителя, первый трехканальный, второй одноканальный и третий Np-канальный (где Np - число «рабочих» спутников) выходы которого соединены соответственно с третьим трехканальным, четвертым одноканальным и пятым Np-канальным входами блока вычисления параметров опорных сигналов, третий и четвертый выходы которого соединены соответственно с пятым и шестым входами измерителя вектора состояния потребителя, который выполнен в виде блока дискриминирующих функций по задержкам сигналов, блока дискриминирующих функций по фазам сигналов, блока матричного умножения, первого и второго блоков масштабирования, комплексного фильтра сглаживания, при этом первый 4N-канальный вход блока дискриминирующих функций по задержкам сигналов соединен с первым 4N-канальным входом измерителя вектора состояния потребителя, а его N-канальный выход соединен с первым N-канальным входом блока матричного умножения, N-канальный выход которого соединен с первым N-канальным входом первого блоки масштабирования, первый 2N-канальный вход блока дискриминирующих функций по фазам сигналов соединен с вторым 2N-канальным входом измерителя вектора состояния потребителя, а его N-канальный выход соединен с первым N-канальным входом второго блока масштабирования, второй N-канальный вход которого подключен к третьему N-канальному входу измерителя вектора состояния потребителя, а четырехканальный выход первого блока масштабирования соединен с первым четырехканальным входом комплексного фильтра сглаживания, второй N-канальный вход которого соединен с N-канальным выходом второго блока масштабирования, при этом третий N-канальный вход комплексного фильтра сглаживания соединен с вторым входом второго блока масштабирования и вторыми входами блока дискриминирующих функций по задержкам сигналов и блока дискриминирующих функций по фазам сигналов, при этом его четвертый вход соединен с вторыми входами блока матричного умножения и первого блока масштабирования и одновременно является пятым входом измерителя вектора состояния потребителя, а пятый N-канальный и шестой входы комплексного фильтра сглаживания соединены соответственно с четвертым N-канальным и шестым входами измерителя вектора состояния потребителя, комплексный фильтр сглаживания выполнен в виде блока формирования матрицы весовых коэффициентов, блока формирования переходной матрицы, первого, второго и третьего матричных умножителей, первого и второго векторных сумматоров и векторного блока задержек на такт, при этом N-канальный вход блока формирования матрицы весовых коэффициентов соединен с первым N-канальным входом блока формирования переходной матрицы и с первым N-канальным входом третьего матричного умножителя, соединенного с третьим N-канальным входом комплексного фильтра сглаживания, первый четырехканальный вход первого матричного умножителя соединен с первым четырехканальным входом комплексного фильтра сглаживания, второй N-канальный вход первого матричного умножителя соединен с вторым N-канальным входом комплексного фильтра сглаживания, выход блока формирования матрицы весовых коэффициентов соединен с третьим входом первого матричного умножителя, (Np+1)-канальный выход которого соединен с первым (Np+11)-канальным входом первого векторного сумматора, второй вход блока формирования переходной матрицы соединен с четвертым входом комплексного фильтра сглаживания, а его выход соединен со вторым входом второго матричного умножителя, второй N-канальный вход третьего матричного умножителя соединен с пятым N-канальным входом комплексного фильтра сглаживания, третий вход третьего матричного умножителя соединен с шестым входом комплексного фильтра сглаживания. (Np+11)-канальный выход третьего матричного умножителя соединен с первым (Np+11)-канальным входом второго векторного сумматора, второй (Np+11)-канальный вход первого векторного сумматора соединен с (Np+11)-канальным выходом второго векторного сумматора, второй (Np+11)-канальный вход которого соединен с (Np+11)-канальным выходом 6 второго матричного умножителя, первый трехканальный выход первого векторного сумматора соединен с первым трехканальным входом векторного блока задержек на такт, является первым трехканальным выходом комплексного фильтра сглаживания и одновременно является первым трехканальным выходом измерителя вектора состояния потребителя, второй одноканальный выход первого векторного сумматора соединен со вторым одноканальным входом векторного блока задержек на такт и с вторым одноканальным выходом комплексного фильтра сглаживания и одновременно с вторым одноканальным выходом измерителя вектора состояния потребителя, третий Np-канальный выход первого векторного сумматора соединен с третьим Np-канальным входом векторного блока задержек на такт и с третьим Np-канальным выходом комплексного фильтра сглаживания и одновременно с третьим Np-канальным выходом измерителя вектора состояния потребителя, четвертый семиканальный выход первого векторного сумматора соединен с четвертым семиканальным входом векторного блока задержек на такт, (Np+11)-канальный выход которого соединен с первым (Np+11)-канальным входом второго матричного умножителя, блок вычисления параметров опорных сигналов выполнен в виде блока вычисления дальностей до спутников, блока вычисления направляющих косинусов, блока вычисления псевдодальностей, блока вычисления псевдофаз, блока вычисления матрицы направляющих косинусов, блока вычисления диагональной матрицы, блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей и блока вычисления сигналов управления фазами генераторов гармонических сигналов, первый N-канальный вход блока вычисления дальностей до спутников соединен с первым N-канальным входом блока вычисления направляющих косинусов и является вторым N-канальным входом блока вычисления параметров опорных сигналов, второй трехканальный вход блока вычисления дальностей до спутников соединен с вторым трехканальным входом блока вычисления направляющих косинусов и является третьим трехканальным входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления дальностей до спутников соединен с третьим N-канальным входом блока вычисления направляющих косинусов и вторым N-канальным входом блока вычисления псевдодальностей, первый вход которого соединен с первым входом блока вычисления псевдофаз и является четвертым входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления направляющих косинусов соединен с N-канальными входами блока вычисления матрицы направляющих косинусов и блока вычисления диагональной матрицы, выход блока вычисления матрицы направляющих косинусов является третьим выходом блока вычисления параметров опорных сигналов, выход блока вычисления диагональной матрицы является четвертым выходом блока вычисления параметров опорных сигналов 14, N-канальный выход блока вычисления псевдодальностей соединен с N-канальным входом блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей, N-канальный выход которого является первым N-канальным выходом блока вычисления параметров опорных сигналов, который соединен с четвертым N-канальным выходом многоканального коррелятора, второй N-канальный вход блока вычисления псевдофаз соединен с первым N-канальным входом блока вычисления параметров опорных сигналов, третий Np-канальный вход блока вычисления псевдофаз соединен с пятым Np-канальным входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления псевдофаз соединен с N-канальным входом блока вычисления сигналов управления фазами генераторов гармонических сигналов, выход которого соединен с вторым N-канальным выходом блока вычисления параметров опорных сигналов, который соединен с пятым N-канальным выходом многоканального коррелятора.
Сущность изобретения поясняется чертежом, на котором представлена функциональная схема цифрового приемника сигналов спутниковых радионавигационных систем ГЛОНАСС и GPS.
Цифровой приемник сигналов спутниковых радионавигационных систем содержит антенну 1, радиоприемный блок 2, имеющий первый 3, второй 4 и третий 5 конверторы, опорный генератор 6, синтезатор частот 7 и блок цифровой обработки 8, первый и второй выходы которого являются соответствующими выходами радиоприемного блока 2, а вход первого конвертора 3 является входом радиоприемного блока 2, процессор 9, содержащий многоканальный коррелятор 10, измеритель вектора состояния потребителя 11, декодер навигационной информации 12, блок назначения на каналы 13 и блок вычисления параметров опорных сигналов 14. Первый и второй входы многоканального коррелятора 10 процессора 9 являются соответственно первым и вторым входами процессора 9, которые соединены соответственно с первым и вторым выходами радиоприемного блока 2, в котором выход опорного генератора 6 соединен с входом синтезатора частот 7, первый, второй, третий и четвертый выходы которого соединены соответственно с вторыми входами первого 3, второго 4 и третьего 5 конверторов и с третьим входом блока цифровой обработки 8. Первый и второй выходы первого конвертора 3 соединены соответственно с первыми входами второго 4 и третьего 5 конверторов, выходы которых соединены соответственно с первым и вторым входами блока цифровой обработки 8.
Многоканальный коррелятор 10 выполнен из 6N идентичных по структуре каналов, где N - целое число и может принимать значение 4≤N≤24 и характеризует число навигационных спутников СРНС ГЛОНАСС и/или GPS, сигналы которых принимаются в обработку. Каждый канал многоканального коррелятора 10 содержит перемножитель 15, интегратор со сбросом 16, генератор псевдослучайной последовательности 17 и генератор гармонического сигнала 18. Первые входы перемножителей 15 для первых 3N каналов многоканального коррелятора 10 соединены между собой и являются первыми входами этих каналов, а также являются первым входом многоканального коррелятора 10. Первые входы перемножителей 15 для других 3N каналов многоканального коррелятора 10 соединены между собой и являются первыми входами этих каналов, а также являются вторым входом многоканального коррелятора 10. Второй и третий входы перемножителя 15 каждого канала многоканального коррелятора 10 соединены соответственно с выходами генератора псевдослучайной последовательности 17 и генератора гармонического сигнала 18 данного канала, а выход перемножителя 15 соединен с входом интегратора со сбросом 16, выход которого является выходом канала многоканального коррелятора 10, который, в свою очередь, является одним из 6N выходов многоканального коррелятора 10.
Первые входы генератора псевдослучайной последовательности 17 и генератора гармонического сигнала 18 каждого канала многоканального коррелятора 10 соединены между собой и являются вторым входом канала многоканального коррелятора 10, который, в свою очередь, является одним из входов третьего N-канального входа многоканального коррелятора 10. Второй вход генератора псевдослучайной последовательности 17 каждого канала многоканального коррелятора 10 является третьим входом канала многоканального коррелятора 10, который, в свою очередь, является одним из входов четвертого N-канального входа многоканального коррелятора 10. Второй вход генератора гармонического сигнала 18 каждого канала многоканального коррелятора 10 является четвертым входом канала многоканального коррелятора 10, который, в свою очередь, является одним из входов пятого N-канального входа многоканального коррелятора 10.
Выходы 4N каналов и выходы других 2N каналов многоканального коррелятора 10 являются соответственно первым 4N-канальным и вторым 2N-канальным выходами многоканального коррелятора 10, которые соединены соответственно с первым 4N-канальным и вторым 2N-канальным входами измерителя вектора состояния потребителя 11. Второй 2N-канальный выход многоканального коррелятора 10 соединен с первым 2N-канальным входом декодера навигационной информации 12 и 2N-канальным входом блока назначения на каналы 13, N-канальный выход которого соединен с вторым N-канальным входом декодера навигационной информации 12, третьим N-канальным входом измерителя вектора состояния потребителя 11, третьим N-канальным входом многоканального коррелятора 10 и первым N-канальным входом блока вычисления параметров опорных сигналов 14, первый и второй N-канальные выходы которого соединены соответственно с четвертым и пятым N-канальным входами многоканального коррелятора 10. Первый N-канальный выход декодера навигационной информации 12 соединен с вторым N-канальным входом блока вычисления параметров опорных сигналов 14, а его второй N-канальный выход соединен с четвертым N-канальным входом измерителя вектора состояния потребителя 11, первый трехканальный, второй одноканальный и третий Np-канальный (где Np - число «рабочих» спутников) выходы которого соединены соответственно с третьим трехканальным, четвертым одноканальным и пятым Np-канальным входами блока вычисления параметров опорных сигналов 14, третий и четвертый выходы которого соединены соответственно с пятым и шестым входами измерителя вектора состояния потребителя 11, который содержит блок дискриминирующих функций по задержкам сигналов 19, блок дискриминирующих функций по фазам сигналов 20, блок матричного умножения 21, первый 22 и второй 23 блоки масштабирования, комплексный фильтр сглаживания 24. Первый 4N-канальный вход блока дискриминирующих функций по задержкам сигналов 19 является первым 4N-канальным входом измерителя вектора состояния потребителя 11, а его N-канальный выход соединен с первым N-канальным входом блока матричного умножения 21, N-канальный выход которого соединен с первым N-канальным входом первого блока масштабирования 22. Первый 2N-канальный вход блока дискриминирующих функций по фазам сигналов 20 является вторым 2N-канальным входом измерителя вектора состояния потребителя 11, а его N-канальный выход соединен с первым N-канальным входом второго блока масштабирования 23, второй N-канальный вход которого соединен с третьим N-канальным входом измерителя вектора состояния потребителя 11. Четырехканальный выход первого блока масштабирования 22 соединен с первым четырехканальным входом комплексного фильтра сглаживания 24, второй N-канальный вход которого соединен с N-канальным выходом второго блока масштабирования 23. Третий N-канальный вход комплексного фильтра сглаживания 24 соединен с вторым входом второго блока масштабирования 23 и вторыми входами блока дискриминирующих функций по задержкам сигналов 19 и блока дискриминирующих функций по фазам сигналов 20, его четвертый вход соединен с вторыми входами блока матричного умножения 21 и первого блока масштабирования 22 и одновременно является пятым входом измерителя вектора состояния потребителя 11, а пятый N-канальный и шестой входы комплексного фильтра сглаживания 24 являются соответственно четвертым N-канальным и шестым входами измерителя вектора состояния потребителя 11.
Комплексный фильтр сглаживания 24 содержит блок формирования матрицы весовых коэффициентов 25, блок формирования переходной матрицы 26, первый 27, второй 28 и третий 29 матричные умножители, первый 30 и второй 31 векторные сумматоры и векторный блок задержек на такт 32. N-канальный вход блока формирования матрицы весовых коэффициентов 25 соединен с первым N-канальным входом блока формирования переходной матрицы 26, первым N-канальным входом третьего матричного умножителя 29 и является третьим N-канальным входом комплексного фильтра сглаживания 24. Первый четырехканальный вход первого матричного умножителя 27 является первым четырехканальным входом комплексного фильтра сглаживания 24. Второй N-канальный вход первого матричного умножителя 27 является вторым N-канальным входом комплексного фильтра сглаживания 24. Выход блока формирования матрицы весовых коэффициентов 25 соединен с третьим входом первого матричного умножителя 27, (Np+11)-канальный выход которого соединен с первым (Np+11)-канальным входом первого векторного сумматора 30. Второй вход блока формирования переходной матрицы 26 является четвертым входом комплексного фильтра сглаживания 24, а его выход соединен со вторым входом второго матричного умножителя 28. Второй N-канальный вход третьего матричного умножителя 29 является пятым N-канальным входом комплексного фильтра сглаживания 24, третий вход третьего матричного умножителя 29 является шестым входом комплексного фильтра сглаживания 24. (Np+11)-канальный выход третьего матричного умножителя 29 соединен с первым (Np+11)-канальным входом второго векторного сумматора 31. Второй (Np+11)-канальный вход первого векторного сумматора 30 соединен с (Np+11)-канальным выходом второго векторного сумматора 31, второй (Np+11)-канальный вход которого соединен с (Np+11)-канальным выходом второго матричного умножителя 28. Первый трехканальный выход первого векторного сумматора 30 соединен с первым трехканальным входом векторного блока задержек на такт 32, является первым трехканальным выходом комплексного фильтра сглаживания 24 и одновременно является первым трехканальным выходом измерителя вектора состояния потребителя 11. Второй одноканальный выход первого векторного сумматора 30 соединен со вторым одноканальным входом векторного блока задержек на такт 32, является вторым одноканальным выходом комплексного фильтра сглаживания 24 и одновременно является вторым одноканальным выходом измерителя вектора состояния потребителя 11. Третий Np-канальный выход первого векторного сумматора 30 соединен с третьим Np-канальным входом векторного блока задержек на такт 32, является третьим Np-канальным выходом комплексного фильтра сглаживания 24 и одновременно является третьим Np-канальным выходом измерителя вектора состояния потребителя 11. Четвертый семиканальный выход первого векторного сумматора 30 соединен с четвертым семиканальным входом векторного блока задержек на такт 32, (Np+11)-канальный выход которого соединен с первым (Np+11)-канальным входом второго матричного умножителя 28.
Блок вычисления параметров опорных сигналов 14 содержит блок вычисления дальностей до спутников 33, блок вычисления направляющих косинусов 34, блок вычисления псевдодальностей 35, блок вычисления псевдофаз 36, блок вычисления матрицы направляющих косинусов 37, блок вычисления диагональной матрицы 38, блок вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39 и блок вычисления сигналов управления фазами генераторов гармонических сигналов 40. Первый N-канальный вход блока вычисления дальностей до спутников 33 соединен с первым N-канальным входом блока вычисления направляющих косинусов 34 и является вторым N-канальным входом блока вычисления параметров опорных сигналов 14. Второй трехканальный вход блока вычисления дальностей до спутников 33 соединен с вторым трехканальным входом блока вычисления направляющих косинусов 34 и является третьим трехканальным входом блока вычисления параметров опорных сигналов 14. N-канальный выход блока вычисления дальностей до спутников 33 соединен с третьим N-канальным входом блока вычисления направляющих косинусов 34 и вторым N-канальным входом блока вычисления псевдодальностей 35, первый вход которого соединен с первым входом блока вычисления псевдофаз 36 и является четвертым входом блока вычисления параметров опорных сигналов 14. N-канальный выход блока вычисления направляющих косинусов 34 соединен с N-канальными входами блока вычисления матрицы направляющих косинусов 37 и блока вычисления диагональной матрицы 38. Выход блока вычисления матрицы направляющих косинусов 37 является третьим выходом блока вычисления параметров опорных сигналов 14. Выход блока вычисления диагональной матрицы 38 является четвертым выходом блока вычисления параметров опорных сигналов 14. N-канальный выход блока вычисления псевдодальностей 35 соединен с N-канальным входом блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39, N-канальный выход которого является первым N-канальным выходом блока вычисления параметров опорных сигналов 14, который соединен с четверым N-канальным выходом многоканального коррелятора 10.
Второй N-канальный вход блока вычисления псевдофаз 36 является первым N-канальным входом блока вычисления параметров опорных сигналов 14. Третий Np-канальный вход блока вычисления псевдофаз 36 соединен с пятым Np-канальным входом блока вычисления параметров опорных сигналов 14. N-канальный выход блока вычисления псевдофаз 36 соединен с N-канальным входом блока вычисления сигналов управления фазами генераторов гармонических сигналов 40, выход которого является вторым N-канальным выходом блока вычисления параметров опорных сигналов 14, который соединен с пятым N-канальным выходом многоканального коррелятора 10.
Цифровой приемник спутниковых радионавигационных систем работает следующим образом.
Антенна 1 цифрового приемника обеспечивает прием сигналов L1-диапазона, излучаемых навигационными спутниками СРНС GPS (1575.42 МГц) и навигационными спутниками СРНС ГЛОНАСС (1598…1610 МГц). В приемнике используется пассивная антенна с полусферической диаграммой направленности и правосторонней круговой поляризацией. Радиоприемный блок 2 цифрового приемника усиливает сигнал, поступающий с выхода антенны 1, осуществляет предварительную частотную селекцию от помех, разделение сигналов СРНС ГЛОНАСС и GPS по различным ветвям обработки, переносит сигналы на более низкую промежуточную частоту и преобразовывает входную смесь сигналов и помех в цифровую форму на промежуточной частоте. В качестве опорного генератора 6 используется кварцевый генератор частоты 10 МГц с относительной нестабильностью 10-11. Синтезатор частот 7 формирует из опорной частоты 10 МГц, поступающей с выхода опорного генератора 6, сетку опорных частот, используемых в первом 3, втором 4 и третьем 5 конверторах для понижения частот входных сигналов, и частоту дискретизации входного сигнала. В блоке цифровой обработки 8 осуществляется аналого-цифровое преобразование сигналов, поступающих с выходов второго 4 и третьего 5 конверторов, и упаковка цифровых данных в 32-разрядные слова для более эффективной работы процессора 3, который вычисляет вектор состояния объекта (включающий три пространственные координаты, три составляющих вектора скорости и время) по цифровым выборкам сигналов на промежуточной частоте, поступающих с двух выходов радиоприемного блока 2.
Многоканальный коррелятор 10 состоит из 6N идентичных каналов, в которых для каждого из N сигналов СРНС ГЛОНАСС и/или GPS вычисляются корреляционные суммы произведений цифровых отсчетов входного сигнала, опорной псевдослучайной последовательности и опорного гармонического сигнала. Отсчеты входного сигнала поступают на первый или второй входы многоканального коррелятора 10 с соответствующих выходов радиоприемного блока 2. Отсчеты опорной псевдослучайной последовательности формируются внутри каждого канала, например i-го  , причем структура псевдослучайной последовательности соответствует i-му сигналу СРНС, а состав индексов рабочих псевдослучайных последовательностей содержится в сигнале, поступающем на третий N-канальный вход многоканального коррелятора 10 с пятого выхода блока вычисления параметров опорных сигналов 14. Задержка псевдослучайной последовательности в i-м канале определяется из состава значений, поступающих на четвертый N-канальный вход многоканального коррелятора 10 с третьего выхода блока вычисления параметров опорных сигналов 14. Отсчеты опорного гармонического сигнала также формируются внутри каждого канала, например того же i-го, причем центральная частота этого сигнала соответствует назначенному для этого канала значению, состав индексов рабочих частот содержится в сигнале, поступающем на третий N-канальный вход многоканального коррелятора 10 с пятого выхода блока вычисления параметров опорных сигналов 14. Значение доплеровского смещения частоты опорного гармонического сигнала i-го канала определяется из состава значений оценок доплеровских частот, поступающих на пятый N-канальный вход многоканального коррелятора 10 с четвертого выхода блока вычисления параметров опорных сигналов 14. Число накапливаемых в корреляционной сумме слагаемых фиксировано и соответствует, как правило, от 1 до 5 мс. В начале каждого интервала накопления корреляционная сумма обнуляется.
, причем структура псевдослучайной последовательности соответствует i-му сигналу СРНС, а состав индексов рабочих псевдослучайных последовательностей содержится в сигнале, поступающем на третий N-канальный вход многоканального коррелятора 10 с пятого выхода блока вычисления параметров опорных сигналов 14. Задержка псевдослучайной последовательности в i-м канале определяется из состава значений, поступающих на четвертый N-канальный вход многоканального коррелятора 10 с третьего выхода блока вычисления параметров опорных сигналов 14. Отсчеты опорного гармонического сигнала также формируются внутри каждого канала, например того же i-го, причем центральная частота этого сигнала соответствует назначенному для этого канала значению, состав индексов рабочих частот содержится в сигнале, поступающем на третий N-канальный вход многоканального коррелятора 10 с пятого выхода блока вычисления параметров опорных сигналов 14. Значение доплеровского смещения частоты опорного гармонического сигнала i-го канала определяется из состава значений оценок доплеровских частот, поступающих на пятый N-канальный вход многоканального коррелятора 10 с четвертого выхода блока вычисления параметров опорных сигналов 14. Число накапливаемых в корреляционной сумме слагаемых фиксировано и соответствует, как правило, от 1 до 5 мс. В начале каждого интервала накопления корреляционная сумма обнуляется.
В многоканальном корреляторе 10 формируются центральные синфазная IP,i и квадратурная QP,i составляющие для каждого i-го канала, которые подаются на второй 2N-канальный выход многоканального коррелятора 10, сдвинутые «вперед» синфазная IE,i и квадратурная QE,i составляющие и сдвинутые «назад» синфазная IL,i и квадратурная QL,i составляющие для каждого i-го канала, которые подаются на первый 4N-канальный выход многоканального коррелятора 10.
Декодер навигационной информации 12 выделяет из 2N сигналов, поступающих на его первый 2N-канальный вход с 2N-канального выхода многоканального коррелятора 10, навигационные данные (эфемериды, альманах, параметры модели ионосферы и бортовой шкалы времени и др.) для тех навигационных спутников СРНС ГЛОНАСС и GPS, номера которых определяются N-мерным сигналом, поступающим на второй N-канальный вход декодера навигационной информации 12 с N-канального выхода блока назначения на каналы 13. Декодер навигационной информации 12 обеспечивает синхронизацию начала кадров навигационных сообщений спутников СРНС ГЛОНАСС и GPS; выделение символов навигационных данных в результате обработки синфазных составляющих IP,i , поступающих с второго 2N-канального выхода многоканального коррелятора 10; декодирование и контроль достоверности данных.
Трехмерные координаты и три составляющие векторов скорости «рабочих» (количеством Np) спутников, которые определены блоком назначения на каналы 13 в сигнале, поступающем на второй N-канальный вход декодера навигационной информации 12, передаются соответственно на первый и второй N-канальные выходы декодера навигационной информации 12. Если число Np<N, то на оставшиеся N-Np выходов декодера навигационной информации 12 подаются нули.
Блок назначения на каналы 13 предназначен для определения тех спутников СРНС ГЛОНАСС и GPS, сигналы которых могут эффективно обрабатываться в данном сеансе работы. Для этого на 2N-канальный вход блока назначения на каналы 13 подается сигнал с второго 2N-канального выхода многоканального коррелятора 10. Для каждой пары сигналов IP,i и QP,i вычисляется среднее значение
 ,
,
которое сравнивается с заданным порогом d. Если γi≥d, то принимается решение, что сигнал i-го спутника принимается в обработку, что фиксируется присвоением индикатору γi, значения 1. В противном случае полагается γi=0. N-мерный вектор γ={γ1, γ2,…γN} (индикатор «рабочих» сигналов) подается на N-канальный выход блока назначения на каналы 13.
Измеритель вектора состояния потребителя 11 обеспечивает получение оценок вектора состояния потребителя, включающего три пространственные координаты, три составляющие вектора скорости и смещение шкалы времени потребителя, по сигналам, поступающим с выхода многоканального коррелятора 10. На первый вход блока дискриминирующих функций по задержкам сигналов 19 поступают 4N сигналов IE,i, QE,i, IL,i, QL,i первого 4N-канального выхода многоканального коррелятора 10, а на его второй N-канальный вход поступает индикатор «рабочих» сигналов γ с N-канального выхода блока назначения на каналы 13. В данном блоке вычисляются дискриминирующие функции по задержкам сигналов

для тех значений i, для которых соответствующая компонента индикатора «рабочих» сигналов γ равна единице, для остальных значений i полагается uд,τi=0. Сигналы uд,τi пропорциональны рассогласованиям по задержкам сигналов соответствующих навигационных спутников.
На первый вход блока дискриминирующих функций по фазам сигналов 16 поступают 2N сигналов IP,i, QP,i с второго 2N-канального выхода многоканального коррелятора 10, а на его второй N-канальный вход, соединенный вторым N-канальным входом блока дискриминирующих функций по задержкам сигналов 19, поступает индикатор «рабочих» сигналов γ. В данном блоке вычисляются дискриминирующие функции по фазам сигналов
 ,
, 
для тех значений i, для которых соответствующая компонента индикатора «рабочих» сигналов γ равна единице, для остальных значений i полагается uд,φi=0.
N-канальный выход блока дискриминирующих функций по задержкам сигналов 19 соединен с первым N-канальным входом первого блока матричного умножения 21, на второй вход которого подается матрица Н размером N×4 с третьего выхода блока вычисления параметров опорных сигналов 14. В блоке матричного умножения 21 выполняется умножение N-мерного вектора сигналов, поступающих на его первый N-канальный вход, на матрицу HT, что соответствует проецированию рассогласований по задержкам сигналов НС на пространство состояний потребителя, включающего пространственные координаты x,y,z и время t'. На четырехканальный выход блока матричного умножения 21 поступают сигналы, пропорциональные рассогласованиям по координатам x,y,z и смещению шкалы времени t'. Четырехканальный выход блока матричного умножения 21 соединен с четырехканальным входом первого блока масштабирования 22, второй вход которого соединен с вторым входом блока матричного умножения 21 и на который поступает матрица Н. Нормировка входных сигналов блока масштабирования 22 реализуется в результате их умножения на нормировочную матрицу 
где с - скорость света, Sд,τ - расчетное значение крутизны дискриминационных характеристик uд,τi. Нормированный четырехкомпонентный сигнал ΔХ=|Δх Δy Δz Δt'|T подается на четырехканальный выход первого блока масштабирования 22.
На второй N-канальный вход поступает N-мерный индикатор «рабочих» сигналов γ. Во втором блоке масштабирования 23 входные сигналы рассогласований по фазам с первого N-канального входа нормируются с использованием диагональной нормировочной матрицы
 ,
,
где λi - длина волны i-го сигнала спутника, для которого соответствующая компонента индикатора «рабочих» сигналов γ равна единице, для остальных компонент полагается λi=0. Нормированный N-компонентный сигнал  подается на N-канальный выход второго блока масштабирования 23.
подается на N-канальный выход второго блока масштабирования 23.
Комплексный фильтр сглаживания 24 формирует оценки вектора состояния потребителя xk=|xk yk zk D' k Vx,k Vy,k Vz,k Vk'ax ay az RT d|T размером (Nр+11), где {xk,yk,zk} - координаты потребителя в геоцентрической вращающейся системе координат, связанной с Землей (ПЗ-90); {Vx,k, Vy,k, Vz,k} - составляющие вектора скорости потребителя в той же системе координат; {ax, ay, az} - составляющие вектора ускорения потребителя; D'k=ct' - смещение по дальности, обусловленное расхождением шкал времени НС и потребителя; V'k=λƒ'д - смещение по скорости сближения, обусловленное нестабильностью частоты опорного генератора;  - вектор дополнительных переменных, связанных с фазами сигналов
- вектор дополнительных переменных, связанных с фазами сигналов  ,
,  где Np - число «рабочих» сигналов, по которым в данном сеансе работает приемник и которое определяется числом единиц в индикаторе «рабочих» сигналов γ.
где Np - число «рабочих» сигналов, по которым в данном сеансе работает приемник и которое определяется числом единиц в индикаторе «рабочих» сигналов γ.
В блоке формирования матрицы весовых коэффициентов 25 комплексного фильтра сглаживания 24 формируется матрица весовых коэффициентов K размером (Np+11)×N, значения которых заложены в память процессора 3, которая поступает на выход блока формирования матрицы весовых коэффициентов, причем в столбцах с номерами i, для которых в индикаторе «рабочих» сигналов γ стоят нули, также устанавливаются нулевые значения. На первый четырехканальный вход первого матричного умножителя 27, являющегося первым четырехканальным входом комплексного фильтра сглаживания 24, поступает четырехкомпонентный вектор ΔХ нормированных рассогласований по координатам и смещению шкалы времени с четырехканального выхода первого блока масштабирования 22. На второй N-канальный вход первого матричного умножителя 27, являющегося вторым N-канальным входом комплексного фильтра сглаживания 24, поступает N-компонентный вектор  нормированных рассогласований по дополнительным переменным, связанным с фазами сигналов навигационных спутников, с N-канального выхода второго блока масштабирования 23. В первом матричном умножителе 27 осуществляется матричное умножение
нормированных рассогласований по дополнительным переменным, связанным с фазами сигналов навигационных спутников, с N-канального выхода второго блока масштабирования 23. В первом матричном умножителе 27 осуществляется матричное умножение  и выходной сигнал, состоящий из (Np+11) компонент, поступает на (Np+11)-канальный выход первого матричного умножителя 27, который соединен с (Np+11)-канальным входом первого блока векторного суммирования 30.
и выходной сигнал, состоящий из (Np+11) компонент, поступает на (Np+11)-канальный выход первого матричного умножителя 27, который соединен с (Np+11)-канальным входом первого блока векторного суммирования 30.
На четвертый вход комплексного фильтра сглаживания 24 поступает матрица Н с пятого входа измерителя вектора состояния потребителя 11. В блоке формирования переходной матрицы 26 формируется переходная матрица вида
где Im×m - единичная матрица размером m×m, T - временной шаг работы комплексного фильтра сглаживания 24,

матрица  получается из матрицы Н исключением нулевых строк. Сформированная матрица F размером (Np+11)×(Np+11) подается на выход блока формирования переходной матрицы 26, который соединен с вторым входом второго матричного умножителя 28.
получается из матрицы Н исключением нулевых строк. Сформированная матрица F размером (Np+11)×(Np+11) подается на выход блока формирования переходной матрицы 26, который соединен с вторым входом второго матричного умножителя 28.
Второй N-канальный вход третьего матричного умножителя 29 является пятым N-канальным входом комплексного фильтра сглаживания 24, на который поступает N компонентный сигнал, каждая компонента которого содержит три составляющих вектора скорости соответствующего НС, третий вход третьего матричного умножителя 29 является шестым входом комплексного фильтра сглаживания 20, на который поступает матрица diag(Ai) с шестого входа измерителя вектора состояния потребителя 11. Первый управляющий N-канальный вход третьего матричного умножителя 29 соединен с входом блока формирования матрицы весовых коэффициентов 25, и на него поступает N компонентный индикатор «рабочих» сигналов γ. В третьем матричном умножителе 29 выполняется умножение Np составляющих сигнала на его первом входе, для которых соответствующие значения компонент индикатора «рабочих» сигналов γ равны единице, на матрицу  , которая получается из матрицы diag(Ai) исключением j-x строк и столбцов, для которых значению индекса j соответствуют компоненты индикатора «рабочих» сигналов γ со значением, равным нулю. Сформированный в результате перемножения сигнал размерностью Np+11 подается на Np+11-канальный выход третьего матричного умножителя 29, который соединен с первым входом второго векторного сумматора 31.
, которая получается из матрицы diag(Ai) исключением j-x строк и столбцов, для которых значению индекса j соответствуют компоненты индикатора «рабочих» сигналов γ со значением, равным нулю. Сформированный в результате перемножения сигнал размерностью Np+11 подается на Np+11-канальный выход третьего матричного умножителя 29, который соединен с первым входом второго векторного сумматора 31.
Первый (Np+11)-канальный вход первого векторного сумматора 30 соединен с (Np+11)-канальным выходом первого матричного умножителя 27, второй (Np+11)-канальный вход первого векторного сумматора 30 соединен с (Np+11)-канальным выходом второго векторного сумматора 31, второй (Np+11)-канальный вход которого соединен с (Np+11)-канальным выходом второго матричного умножителя 28. Первый трехканальный выход первого векторного сумматора 30, на котором сформированы оценки трех пространственных координат потребителя, соединен с первым трехканальным входом ВБЗТ 32 и является одновременно первым трехканальным выходом комплексного фильтра сглаживания 20. Второй одноканальный выход первого векторного сумматора 30, на котором сформирована оценка смещения шкалы времени, соединен вторым одноканальным входом векторного блока задержек на такт 32 и является одновременно вторым выходом комплексного фильтра сглаживания 24. Третий Np-канальный выход первого векторного сумматора 30, на котором сформированы оценки вектора дополнительных переменных  , связанных с фазами сигналов, соединен третьим Np-канальным входом векторного блока задержек на такт 32 и является одновременно третьим Np-канальным выходом комплексного фильтра сглаживания 24. Четвертый семиканальный выход первого векторного сумматора 30, на котором сформированы оценки трех составляющих векторов скорости и ускорения потребителя и скорость ухода смещения шкалы времени, соединен с четвертым семиканальным входом векторного блока задержек на такт 32, (Np+11)-канальный выход которого соединен с (Np+11)-канальным входом второго матричного умножителя 28.
, связанных с фазами сигналов, соединен третьим Np-канальным входом векторного блока задержек на такт 32 и является одновременно третьим Np-канальным выходом комплексного фильтра сглаживания 24. Четвертый семиканальный выход первого векторного сумматора 30, на котором сформированы оценки трех составляющих векторов скорости и ускорения потребителя и скорость ухода смещения шкалы времени, соединен с четвертым семиканальным входом векторного блока задержек на такт 32, (Np+11)-канальный выход которого соединен с (Np+11)-канальным входом второго матричного умножителя 28.
Блок вычисления параметров опорных сигналов 14 из оценок вектора состояния потребителя  , различные компоненты которого поступают на его первый трехканальный (оценки
, различные компоненты которого поступают на его первый трехканальный (оценки  ), второй одноканальный (оценка
), второй одноканальный (оценка  ) и третий Np-канальный (оценки
) и третий Np-канальный (оценки  d) входы, формирует сигналы управления параметрами генераторов псевдослучайных последовательностей 23 и генераторов гармонических сигналов 24 6N каналов многоканального коррелятора 4. Блок вычисления параметров опорных сигналов 14 содержит блок вычисления дальностей до навигационных спутников 33, блок вычисления направляющих косинусов 34, блок вычисления псевдодальностей 35, блок вычисления псевдофаз 36, блок вычисления матрицы направляющих косинусов 37, блок вычисления диагональной матрицы 38, блок вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39 и блок вычисления сигналов управления фазами генераторов гармонических сигналов 40. Первый N-канальный вход блока вычисления дальностей 33 является вторым N-канальным входом блока вычисления параметров опорных сигналов 14, на который поступает N-мерный вектор координат спутников с первого N-канального выхода декодера навигационной информации 12. Второй трехканальный вход блока вычисления дальностей 33 является третьим трехканальным входом блока вычисления параметров опорных сигналов 14, на который поступают оценки координат потребителя с первого трехканального выхода
d) входы, формирует сигналы управления параметрами генераторов псевдослучайных последовательностей 23 и генераторов гармонических сигналов 24 6N каналов многоканального коррелятора 4. Блок вычисления параметров опорных сигналов 14 содержит блок вычисления дальностей до навигационных спутников 33, блок вычисления направляющих косинусов 34, блок вычисления псевдодальностей 35, блок вычисления псевдофаз 36, блок вычисления матрицы направляющих косинусов 37, блок вычисления диагональной матрицы 38, блок вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39 и блок вычисления сигналов управления фазами генераторов гармонических сигналов 40. Первый N-канальный вход блока вычисления дальностей 33 является вторым N-канальным входом блока вычисления параметров опорных сигналов 14, на который поступает N-мерный вектор координат спутников с первого N-канального выхода декодера навигационной информации 12. Второй трехканальный вход блока вычисления дальностей 33 является третьим трехканальным входом блока вычисления параметров опорных сигналов 14, на который поступают оценки координат потребителя с первого трехканального выхода  измерителя вектора состояния потребителя 11. В блоке вычисления дальностей 33 вычисляются расчетные значения наклонных дальностей до N спутников по формулам
измерителя вектора состояния потребителя 11. В блоке вычисления дальностей 33 вычисляются расчетные значения наклонных дальностей до N спутников по формулам
 ,
,  ,
,
где xHC,i·yHC,i·zHC,i - координаты i-го спутника, состав которых определяется индикатором «рабочих» сигналов γ. N-мерный вектор расчетных дальностей Ri, подается на N-канальный выход блока вычисления дальностей 33.
Первый N-канальный вход блок вычисления направляющих косинусов 34 соединен с первым N-канальным входом блока вычисления дальностей 33, на который поступает N-мерный вектор координат спутника (xHC,i·yHC,i·zHC,i, ), второй N-канальный вход блока вычисления направляющих косинусов 34 соединен с вторым N-канальным входом блока вычисления дальностей 33, на который поступает трехмерный вектор координат потребителя (), третий N-канальный вход блока вычисления направляющих косинусов 34 соединен с N-канальным выходом блока вычисления дальностей 33, и на него поступает вектор расчетных дальностей (Ri, ). В блоке вычисления направляющих косинусов 34 вычисляются направляющие косинусы для навигационных спутников по формулам

N-мерный вектор направляющих косинусов (cos(αi), cos(βi), cos(γi)) для N спутников передается на N-канальный выход блока вычисления направляющих косинусов 34.
N-канальный выход блока вычисления направляющих косинусов 34 соединен с N-канальными входами блока вычисления матрицы направляющих косинусов 37 и блока вычисления диагональной матрицы 38. В блоке вычисления матрицы направляющих косинусов 37 из входных сигналов формируется матрица направляющих косинусов вида
 .
.
Сформированная матрица Н подается на выход блока вычисления матрицы направляющих косинусов 37, который является третьим выходом блока вычисления параметров опорных сигналов 14.
В блоке вычисления диагональной матрицы 38 из входных сигналов формируется диагональная матрица D=diag(Ai), все элементы которой равны нулю, кроме диагональных, которые для i-го диагонального элемента имеют структуру Ai=|cos(αi) cos(ϕi) cos(γi)|. Сформированная матрица D подается на выход блока вычисления диагональной матрицы 38, который является четвертым выходом блока вычисления параметров опорных сигналов 14.
Первые входы блока вычисления псевдодальностей 35 и блока вычисления псевдофаз 36 соединены между собой и являются четвертым входом блока вычисления параметров опорных сигналов 14, на который поступает оценка смещения шкалы времени  с второго выхода измерителя вектора состояния потребителя 11. Второй N-канальный вход блока вычисления псевдодальностей 35 соединен с N-канальный выходом блока вычисления дальностей 33. В блоке вычисления псевдодальностей 35 вычисляются псевдодальности для N спутников по формулам
с второго выхода измерителя вектора состояния потребителя 11. Второй N-канальный вход блока вычисления псевдодальностей 35 соединен с N-канальный выходом блока вычисления дальностей 33. В блоке вычисления псевдодальностей 35 вычисляются псевдодальности для N спутников по формулам
 .
.
Сформированный N-мерный вектор подается на N-канальный выход блока вычисления псевдодальностей 35, который соединен с N-канальным входом блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39.
Второй N-канальный вход блока вычисления псевдофаз 36 является первым N-канальным входом блока вычисления параметров опорных сигналов 14, на который поступает индикатор «рабочих» сигналов γ. Третий Np-канальный вход блока вычисления псевдофаз 36 является пятым Np-канальным входом блока вычисления параметров опорных сигналов 14, на который поступает вектор оценок вспомогательных переменных  , связанных с фазами «рабочих» сигналов, определенных вектором γ. В блоке вычисления псевдофаз 36 вычисляются псевдооценки вспомогательных переменных по формулам
, связанных с фазами «рабочих» сигналов, определенных вектором γ. В блоке вычисления псевдофаз 36 вычисляются псевдооценки вспомогательных переменных по формулам
 ,
,
где INp×Np - единичная матрица соответствующего размера, и формируется N-мерный выходной вектор, в котором части компонент с номерами j, для которых в соответствующей позиции индикатор «рабочих» сигналов γ стоит единица, стоят соответствующие составляющие вектора  , а в остальных - нули. Сформированный N-мерный вектор подается на N-канальный выход блока вычисления псевдофаз 36, который соединен с N-канальным входом блока вычисления сигналов управления фазами генераторов гармонических сигналов 40.
, а в остальных - нули. Сформированный N-мерный вектор подается на N-канальный выход блока вычисления псевдофаз 36, который соединен с N-канальным входом блока вычисления сигналов управления фазами генераторов гармонических сигналов 40.
В блоке вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39 на каждом k-м такте работы запоминается входной векторный сигнал Rпд,k, а векторный сигнал управления задержками генераторов псевдослучайных последовательностей многоканального коррелятора 10 вычисляется как
и подается на N-канальный вход блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей 39, который является первым N-канальным выходом блока вычисления параметров опорных сигналов 14.
В блоке вычисления сигналов управления фазами генераторов гармонических сигналов 40 на каждом k-м такте работы запоминается входной векторный сигнал дополнительных переменных  , а составляющие uφГГС,i векторного сигнала управления UφГГС задержками генераторов гармонических сигналов многоканального коррелятора 10 вычисляются как
, а составляющие uφГГС,i векторного сигнала управления UφГГС задержками генераторов гармонических сигналов многоканального коррелятора 10 вычисляются как
 .
.
Сформированный векторный сигнал uφГГС подается на N-канальный выход блока вычисления сигналов управления фазами генераторов гармонических сигналов 40, который является вторым N-канальным выходом блока вычисления параметров опорных сигналов 14.
Использование изобретения позволяет повысить точность измерения координат и скорости потребителя, а также надежность координатно-временного обеспечения потребителя.
Изобретение относится к области радионавигации. Техническим результатом является повышение точности и надежности координатно-временного обеспечения потребителя при одноэтапной схеме обработки сигналов всех видимых навигационных спутников. Цифровой приемник содержит антенну (1), радиоприемный блок (2), имеющий первый (3), второй (4) и третий (5) конверторы, опорный генератор (6), синтезатор частот (7) и блок цифровой обработки (8), первый и второй выходы которого являются соответствующими выходами радиоприемного блока (2), а вход первого конвертора (3) является входом радиоприемного блока (2), процессор (9), содержащий многоканальный коррелятор (10), измеритель вектора состояния потребителя (11), декодер навигационной информации (12), блок назначения на каналы (13) и блок вычисления параметров опорных сигналов (14). 1 ил.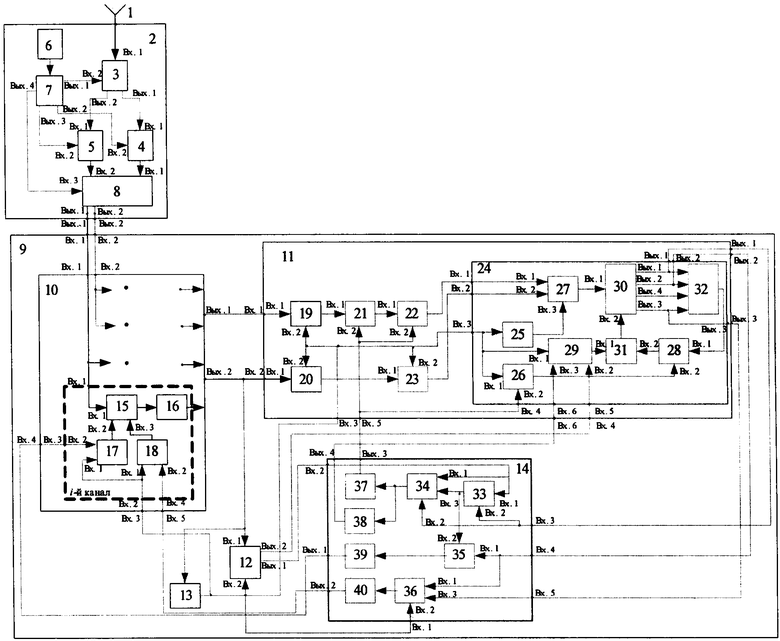
Цифровой приемник спутниковых радионавигационных систем, содержащий последовательно соединенные антенну, радиоприемный блок и процессор, включающий многоканальный коррелятор, измеритель вектора состояния, декодер навигационной информации и блок назначения на каналы, причем радиоприемный блок содержит первый конвертор, вход которого является входом радиоприемного блока, опорный генератор, синтезатор частот и блок цифровой обработки, выход которого является выходом радиоприемного блока и одновременно входом процессора, каждый канал многоканального коррелятора содержит последовательно соединенные перемножитель и интегратор со сбросом, выход которого является выходом канала многоканального коррелятора и одновременно является одним из выходов многоканального коррелятора, генератор псевдослучайной последовательности, выход которого соединен с вторым входом перемножителя, первый вход которого является входом канала многоканального коррелятора и одновременно является входом многоканального коррелятора, генератор гармонического сигнала, выход которого соединен с третьим входом перемножителя, отличающийся тем, что в него введен блок вычисления параметров опорных сигналов, второй выход радиоприемного блока соединен с вторым входом многоканального коррелятора, причем второй вход многоканального коррелятора является одновременно вторым входом процессора, которые соединены соответственно с первым и вторым выходами радиоприемного блока, в котором дополнительно введены второй и третий конверторы, выход опорного генератора соединен с входом синтезатора частот, первый, второй, третий и четвертый выходы которого соединены соответственно с вторыми входами первого, второго и третьего конверторов и с третьим входом блока цифровой обработки, первый и второй выходы первого конвертора соединены соответственно с первыми входами второго и третьего конверторов, выходы которых соединены соответственно с первым и вторым входами блока цифровой обработки, многоканальный коррелятор выполнен в виде 6N идентичных по структуре каналов, где N - целое число и выбрано из соотношения 4≤N≤24, первые входы перемножителей для первых 3N каналов многоканального коррелятора соединены между собой и являются первыми входами этих каналов, а также являются первым входом многоканального коррелятора, первые входы перемножителей для других 3N каналов многоканального коррелятора соединены между собой и являются первыми входами этих каналов, а также являются вторым входом многоканального коррелятора, первые входы генератора псевдослучайной последовательности и генератора гармонического сигнала каждого канала многоканального коррелятора соединены между собой и являются вторым входом канала многоканального коррелятора, который является одним из входов третьего N-канального входа многоканального коррелятора, второй вход генератора псевдослучайной последовательности каждого канала многоканального коррелятора является третьим входом канала многоканального коррелятора, который, в свою очередь, является одним из входов четвертого N-канального входа многоканального коррелятора, второй вход генератора гармонического сигнала каждого канала многоканального коррелятора является четвертым входом канала многоканального коррелятора, который, в свою очередь, является одним из входов пятого N-канального входа многоканального коррелятора, выходы 4N каналов и выходы других 2N каналов многоканального коррелятора являются соответственно первым 4N-канальным и вторым 2N-канальным выходами многоканального коррелятора, которые соединены соответственно с первым 4N-канальным и вторым 2N-канальным входами измерителя вектора состояния потребителя, второй 2N-канальный выход многоканального коррелятора соединен с первым 2N-канальным входом декодера навигационной информации и 2N-канальным входом блока назначения на каналы, N-канальный выход которого соединен с вторым N-канальным входом декодера навигационной информации, третьим N-канальным входом измерителя вектора состояния потребителя, третьим N-канальным входом многоканального коррелятора и первым N-канальным входом блока вычисления параметров опорных сигналов, первый и второй N-канальные выходы которого соединены соответственно с четвертым и пятым N-канальным входами многоканального коррелятора, первый N-канальный выход декодера навигационной информации соединен с вторым N-канальным входом блока вычисления параметров опорных сигналов, а его второй N-канальный выход соединен с четвертым N-канальным входом измерителя вектора состояния потребителя, первый трехканальный, второй одноканальный и третий Np-канальный (где Np - число «рабочих» спутников) выходы которого соединены соответственно с третьим трехканальным, четвертым одноканальным и пятым Nр - канальным входами блока вычисления параметров опорных сигналов, третий и четвертый выходы которого соединены соответственно с пятым и шестым входами измерителя вектора состояния потребителя, который содержит блок дискриминирующих функций по задержкам сигналов, блок дискриминирующих функций по фазам сигналов, блок матричного умножения, первый и второй блоки масштабирования, комплексный фильтр сглаживания, первый 4N-канальный вход блока дискриминирующих функций по задержкам сигналов соединен с первым 4N-канальным входом измерителя вектора состояния потребителя, а его N-канальный выход соединен с первым N-канальным входом блока матричного умножения, N-канальный выход которого соединен с первым N-канальным входом первого блока масштабирования, первый 2N-канальный вход блока дискриминирующих функций по фазам сигналов, соединен с вторым 2N-канальным входом измерителя вектора состояния потребителя, а его N-канальный выход соединен с первым N-канальным входом второго блока масштабирования, второй N-канальный вход которого подключен к третьему N-канальному входу измерителя вектора состояния потребителя, а четырехканальный выход первого блока масштабирования соединен с первым четырехканальным входом комплексного фильтра сглаживания, второй N-канальный вход которого соединен с N-канальным выходом второго блока масштабирования, при этом третий N-канальный вход комплексного фильтра сглаживания соединен с вторым входом второго блока масштабирования и вторыми входами блока дискриминирующих функций по задержкам сигналов и блока дискриминирующих функций по фазам сигналов, его четвертый вход соединен с вторыми входами блока матричного умножения и первого блока масштабирования и одновременно является пятым входом измерителя вектора состояния потребителя, а пятый N-канальный и шестой входы комплексного фильтра сглаживания являются соответственно четвертым N-канальным и шестым входами измерителя вектора состояния потребителя, комплексный фильтр сглаживания выполнен в виде блока формирования матрицы весовых коэффициентов, блока формирования переходной матрицы, первого, второго и третьего матричных умножителей, первого и второго векторных сумматоров и векторного блока задержек на такт, при этом N-канальный вход блока формирования матрицы весовых коэффициентов соединен с первым N-канальным входом блока формирования переходной матрицы, первым N-канальным входом третьего матричного умножителя и соединен с третьим N-канальным входом комплексного фильтра сглаживания, первый четырехканальный вход первого матричного умножителя соединен с первым четырехканальным входом комплексного фильтра сглаживания, второй N-канальный вход первого матричного умножителя соединен с вторым N-канальным входом комплексного фильтра сглаживания, выход блока формирования матрицы весовых коэффициентов соединен с третьим входом первого матричного умножителя, (Np+11)-канальный выход которого соединен с первым (Np+11)-канальным выходом первого векторного сумматора, второй вход блока формирования переходной матрицы соединен с четвертым входом комплексного фильтра сглаживания, а его выход соединен со вторым входом второго матричного умножителя, второй N-канальный вход третьего матричного умножителя соединен с пятым N-канальным входом комплексного фильтра сглаживания, третий вход третьего матричного умножителя соединен с шестым входом комплексного фильтра сглаживания, (Np+11)-канальный выход третьего матричного умножителя соединен с первым (Np+11)-канальным входом второго векторного сумматора, второй (Np+11)-канальный вход первого векторного сумматора соединен с (Np+11)-канальным выходом второго векторного сумматора, второй (Np+11)-канальный вход которого соединен с (Np+11)-канальным выходом второго матричного умножителя, первый трехканальный выход первого векторного сумматора соединен с первым трехканальным входом векторного блока задержек на такт, является первым трехканальным выходом комплексного фильтра сглаживания и одновременно является первым трехканальным выходом измерителя вектора состояния потребителя, второй одноканальный выход первого векторного сумматора соединен со вторым одноканальным входом векторного блока задержек на такт, и с вторым одноканальным выходом комплексного фильтра сглаживания и одновременно с вторым одноканальным выходом измерителя вектора состояния потребителя, третий Nр-канальный выход первого векторного сумматора соединен с третьим N-канальным входом векторного блока задержек на такт, и с третьим Nр-канальным выходом комплексного фильтра сглаживания и одновременно с третьим Np-канальным выходом измерителя вектора состояния потребителя, четвертый семиканальный выход первого векторного сумматора соединен с четвертым семиканальным входом векторного блока задержек на такт, (Nр+11)-канальный выход которого соединен с первым (Np+11)-канальным входом второго матричного умножителя, блок вычисления параметров опорных сигналов выполнен в виде блока вычисления дальностей до спутников, блока вычисления направляющих косинусов, блока вычисления псевдодальностей, блока вычисления псевдофаз, блока вычисления матрицы направляющих косинусов, блока вычисления диагональной матрицы, блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей и блока вычисления сигналов управления фазами генераторов гармонических сигналов, первый N-канальный вход блок вычисления дальностей до спутников соединен с первым N-канальным входом блока вычисления направляющих косинусов и является вторым N-канальным входом блока вычисления параметров опорных сигналов, второй трехканальный вход блока вычисления дальностей до спутников соединен с вторым трехканальным входом блока вычисления направляющих косинусов и является третьим трехканальным входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления дальностей до спутников соединен с третьим N-канальным входом блока вычисления направляющих косинусов и вторым N-канальным входом блока вычисления псевдодальностей, первый вход которого соединен с первым входом блока вычисления псевдофаз и является четвертым входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления направляющих косинусов соединен с N-канальными входами блока вычисления матрицы направляющих косинусов и блока вычисления диагональной матрицы, выход блока вычисления матрицы направляющих косинусов является третьим выходом блока вычисления параметров опорных сигналов, выход блока вычисления диагональной матрицы является четвертым выходом блока вычисления параметров опорных сигналов 14, N-канальный выход блока вычисления псевдодальностей соединен с N-канальным входом блока вычисления сигналов управления задержками генераторов псевдослучайных последовательностей, N-канальный выход которого является первым N-канальным выходом блока вычисления параметров опорных сигналов, который соединен с четверым N-канальным выходом многоканального коррелятора, второй N-канальный вход блока вычисления псевдофаз является первым N-канальным входом блока вычисления параметров опорных сигналов, третий Np-канальный вход блока вычисления псевдофаз соединен с пятым Np-канальным входом блока вычисления параметров опорных сигналов, N-канальный выход блока вычисления псевдофаз соединен с N-канальным входом блока вычисления сигналов управления фазами генераторов гармонических сигналов, выход которого является вторым N-канальным выходом блока вычисления параметров опорных сигналов, который соединен с пятым N-канальным выходом многоканального коррелятора.
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1999 |
|
RU2140090C1 |
| US 5192957 A, 09.03.1993 | |||
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

