Область техники, к которой относится изобретение
Настоящее изобретение относится к системе позиционирования в кинематическом режиме в реальном времени (в дальнейшем называемого RTK), способу RTK позиционирования для нее и, в частности, к точной системе RTK позиционирования, применяющей псевдолит с использованием фазы несущей.
Уровень техники
Существует множество способов позиционирования с использованием искусственных спутников (в дальнейшем называемых просто "спутниками"), однако в настоящее время наиболее широко используемый способ позиционирования связан с использованием спутника глобальной системы позиционирования GPS. При использовании GPS системы также доступны различные способы позиционирования, из которых предпочтительным является способ позиционирования, использующий фазу несущей, вследствие высокой точности, т.е. погрешность составляет всего от нескольких миллиметров до нескольких сантиметров, а также для него требуется короткий период позиционирования. Для способа позиционирования, в котором используется фаза несущей, в данных фазы несущей должна быть найдена неопределенность волнового числа (в дальнейшем называемая "неоднозначностью"), а способ определения неоднозначностей для GPS системы уже хорошо известен, особенно для применений, выполняемых в режиме реального времени. Способ позиционирования, в котором используется фаза несущей, который используется для применений, выполняемых в режиме реального времени, и есть способ RTK позиционирования.
Раскрывается способ, посредством которого пользователь может получить текущее местоположение в режиме реального времени, даже в сложной окружающей обстановке, например позади здания, в закрытом помещении или в подземной области, где определение схемы местоположения затруднительно. Согласно данному способу местоположение портативного терминального устройства, включающего GPS функцию приема, отображается, используя репрезентативный символ, а также, на основе погрешности позиционирования, направления скорости и ускорения, которые получаются посредством анализа, используя GPS сигнал, отображаются кружки погрешности позиционирования и стрелки, указывающие скорость и прямое направление, с символом, расположенным в центре. Вместо использования текущего местоположения, погрешности позиционирования, скорости и прямого направления терминальное устройство отображения, включающее GPS приемник или функцию приема GPS сигнала, использует информацию, такую как предыдущие местоположения терминального устройства, значения погрешности, скорости и прямого направления, для отображения прогнозируемого местоположения, погрешности позиционирования, скорости и прямого направления.
Патент JP-A-2003-215228 относится к связанному уровню техники.
Когда используется способ позиционирования с применением фазы несущей, требуется изменение геометрии, которое определяется в соответствии с положениями источника сигналов, мобильного приемника пользователя и приемника опорной станции. Геометрия должна изменяться только для каждого цикла измерения (в дальнейшем называемого "периодом"). Изменение геометрии является условием для определения неоднозначности, и, когда позиционирование осуществляется на открытом пространстве, указанное условие удовлетворяется посредством перемещения спутника.
Вообще говоря, как только происходит операция инициализации для способа позиционирования, использующего фазу несущей, выполняется определение неоднозначности. Когда выполнена операция инициализации, определена неоднозначность, и определено исходное местоположение пользователя. После этого, продолжая прием сигнала со спутника, пользователь перемещается от одной точки измерения к другой, и выполняется позиционирование в каждой точке измерения. Согласно способу позиционирования, использующему фазу несущей, важно, чтобы сигнал непрерывно принимался не только в каждой точке измерения, но также и в то время, когда пользователь перемещается. Однако из-за внешних факторов, таких как воздействие задержки прохождения волны в ионосфере или тропосфере, или окружающая среда радиосигналов, например многолучевое распространение радиоволн в точке измерения, нарушение или перерыв в приеме сигнала со спутника являются нередкими, и каждый раз, когда нарушается прием сигналов, должна повторяться операция определения неоднозначности.
Существенная проблема, воздействующая не только на RTK позиционирование, но и, вообще, на все способы позиционирования, зависящие от спутников, в которых используются спутники, состоит в том, что в горах и лесах, а также среди небоскребов, в туннелях, зданиях, метрополитене, в так называемых скрытых местоположениях, если смотреть со спутника, прием спутниковых сигналов оказывается беспорядочным или невозможным. Таким образом, иногда либо спутниковые сигналы не могут быть приняты, либо число принимаемых сигналов недостаточно для позиционирования. В таком случае, либо позиционирование не может быть выполнено, либо оно не может быть выполнено корректно.
Согласно способу, раскрытому в JP-A-2003-215228, для так называемого скрытого местоположения, если смотреть со спутника, например в горах, лесу или среди небоскребов, в туннеле, здании, метрополитене, где позиционирование не может быть выполнено, для того чтобы рассчитать прогнозируемый маршрут, используется предшествующая история, то есть история позиционирования, проведенного в указанном местоположении. Таким образом, если позиционирование начнет выполняться в отношении исходного местоположения, в котором позиционирование не может быть завершено, то для такого местоположения нет предшествующей истории, и для указанного местоположения не может быть выполнено позиционирование.
Изобретатели предложили один способ для выполнения позиционирования внутри замкнутого пространства. Согласно этому способу на земле вместо GPS спутника устанавливается, например, псевдоспутник (в дальнейшем называемый "псевдолитом"), а также один опорный приемник, которые в основном используются для RTK позиционирования. Затем, используя сигнал, полученный от псевдолита, калибруется мобильный приемник пользователя. Однако при использовании указанного способа, поскольку псевдолит и опорный приемник фиксированы, то изменения геометрии не возникает. Таким образом, исходное местоположение мобильного приемника пользователя не может быть определено, и функция точного позиционирования по фазе несущей, имеющая погрешность всего от нескольких сантиметров до нескольких миллиметров, не может использоваться.
Для того чтобы использовать способ позиционирования, применяющий фазу несущей, изобретатели перемещали один приемник опорной станции, чтобы изменить геометрию. Однако согласно способу позиционирования, применяющему фазу несущей, местоположение опорного приемника должно быть получено до начала операции определения неоднозначности, так что способ, изучаемый изобретателями, является нежизнеспособным решением. Далее, хотя также доступен независимый способ позиционирования с применением кода, указанный способ не является подходящим, особенно для точного позиционирования в закрытом помещении, поскольку при этом возникает погрешность, по меньшей мере, в несколько метров.
Поскольку в области робототехники требуется автоматическое прецизионное позиционирование внутри замкнутого пространства, существует потребность в точном средстве позиционирования, которое также может применяться и для роботов.
Решаемая проблема заключается в том, что в местах, таких как открытые участки пространства, в которых сигнал со спутника не может быть принят, и в местах, географически скрытых от спутника, например в городах или в горах, в которых число сигналов со спутника, требуемое для позиционирования, не может быть принято, способ позиционирования, использующий фазу несущей, не может использоваться, и невозможно точное позиционирование. В частности, проблема заключается в том, что, когда пользователь не имеет никакой предварительной информации о местоположении, пользователь не имеет никаких средств для определения его или ее местоположения.
Сущность изобретения
Изобретение предлагает систему позиционирования в кинематическом режиме в реальном времени RTK, определяющую положения с помощью псевдолитов, заменяющих GPS спутники, содержащую множество псевдолитов, каждый из которых расположен в заданном положении; мобильный приемник для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов; стационарную опорную станцию, расположенную в заданном положении и предназначенную для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов; перемещающуюся опорную станцию для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов, а также для перемещения; процессор пользователя для позиционирования мобильного приемника на основе кода и фазы несущих, передаваемых из стационарной опорной станции и перемещающейся опорной станции соответственно, а также кода и фазы несущей, передаваемых с мобильного приемника; и линию передачи данных для передачи всех данных от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника в процессор пользователя, причем процессору пользователя известно положение стационарной опорной станции и каждое положение псевдолита.
Кроме того, для трехмерного позиционирования мобильного приемника используются, по меньшей мере, четыре псевдолита, а для двумерного позиционирования мобильного приемника используются, по меньшей мере, три псевдолита.
Изобретение также предлагает систему позиционирования в кинематическом режиме в реальном времени RTK, определяющую местоположения с помощью GPS спутника и псевдолита, содержащую GPS спутник; по меньшей мере, один псевдолит, каждый из которых расположен в заданном положении; мобильный приемник для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита; стационарную опорную станцию, расположенную в заданном положении и предназначенную для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита; перемещающуюся опорную станцию для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита, а также для перемещения; процессор пользователя для позиционирования мобильного приемника на основе кода и фазы несущих, передаваемых из стационарной опорной станции и перемещающейся опорной станции соответственно, а также кода и фазы несущей, передаваемых из мобильного приемника; и линию передачи данных, для передачи всех данных от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника в процессор пользователя, причем процессору пользователя известно положение стационарной опорной станции и положение псевдолита.
Кроме того, для трехмерного позиционирования мобильного приемника используется, по меньшей мере, четыре спутника, включая GPS спутник и псевдолит, а для двумерного позиционирования мобильного приемника используется, по меньшей мере, три спутника, включая GPS спутник и псевдолит.
Изобретение также обеспечивает способ позиционирования RTK, заключающийся в том, что устанавливают положения псевдолитов, которые должны быть заранее известны процессору пользователя, и устанавливают положение стационарной опорной станции, которое должно быть известно процессору пользователя; измеряют код и фазу несущих сигналов, передаваемых с псевдолитов, с помощью стационарной опорной станции, перемещающейся опорной станции и мобильного приемника, который находится у пользователя соответственно; передают данные кода и данные фазы несущей, соответственно измеренные в стационарной опорной станции, перемещающейся опорной станции и мобильном приемнике, в процессор пользователя с помощью линии передачи данных; позиционируют мобильный приемник на основе кода и фазы несущих, передаваемых от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника.
Следовательно, позиционирование, которое применяет фазу несущей, может выполняться даже в таких местах, как закрытые помещения, в которых GPS сигнал не может быть принят, или в местах, скрытых от спутника, например, таких, которые расположены в горах и лесах, а также позади небоскребов в городах, в которых не может быть принято необходимое для позиционирования число GPS сигналов. В результате может быть выполнено точное позиционирование, имеющее погрешность всего от нескольких миллиметров до нескольких сантиметров.
Кроме того, псевдолит передает данные, передаваемые с GPS спутников, а стационарная опорная станция, перемещающаяся опорная станция и мобильный приемник имеют функцию GPS приемников.
Следовательно, по сравнению с обычным позиционированием, использующим GPS, обеспечивается многоцелевое использование.
Кроме того, псевдолит использует режим множественного доступа с частотным разделением каналов FDMA, МДЧР и ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник.
Кроме того, псевдолит ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник, используя пространственное разделение спутников.
Таким образом, можно обеспечить систему позиционирования RTK, которая использует не только GPS спутники, но также и все навигационные спутники, стационарные спутники и квазистационарные спутники.
Кроме того, по меньшей мере, один из псевдолитов является GPS-подобным спутником.
Кроме того, по меньшей мере, один из псевдолитов является фиксированным источником сигналов с расширенным спектром.
Кроме того, по меньшей мере, один из псевдолитов является стационарным спутником или квазистационарным спутником.
Таким образом, можно создать систему RTK позиционирования, которая функционирует на открытом пространстве, используя в качестве источника сигналов стационарный спутник или квазистационарный спутник.
Кроме того, фиксированным источником сигналов с расширенным спектром является синхролит.
Кроме того, фиксированным источником сигналов с расширенным спектром является ретранслятор GPS сигналов.
Кроме того, ретранслятор GPS сигналов передает GPS-подобный сигнал.
Кроме того, ретранслятор GPS сигналов передает сигнал с расширенным спектром, аналогичный GPS-подобному сигналу.
Кроме того, используются пять псевдолитов, и псевдолит ретранслирует сигналы в двух различных полосах частот, и положение перемещающейся опорной станции определяется оперативно.
Таким образом, поскольку инициализация автоматически выполняется оперативно, пользователь может выполнять позиционирование в режиме реального времени, что очень практично и удобно.
Кроме того, перемещающаяся опорная станция перемещается по кругу, в центре которого расположена стационарная опорная станция.
Таким образом, поскольку число неизвестных параметров уменьшено, процесс получения базовой линии значительно упрощается, и нагрузка, приходящаяся на программу анализа, может быть уменьшена.
Кроме того, процессор пользователя является процессором внутри мобильного приемника.
Следовательно, конфигурация системы позиционирования RTK может быть упрощена.
Кроме того, процессором пользователя является компьютер, связанный с мобильным приемником.
В случае, когда программа анализа выполняется компьютером, имеющим большую вычислительную способность, период проведения анализа может быть значительно уменьшен.
Кроме того, линия передачи данных представляет собой беспроводную линию связи.
Кроме того, линия передачи данных представляет собой проводную линию связи.
Кроме того, используются, по меньшей мере, два мобильных приемника, и один из мобильный приемников, с помощью которого обеспечивается функция опорной станции, используется в качестве перемещающейся опорной станции.
Таким образом, число устройств, которые должны быть установлены в закрытом помещении, может быть снижено.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие чертежи, на которых:
фиг.1 - диаграмма, изображающая конфигурацию самой главной части одного варианта осуществления настоящего изобретения,
фиг.2 - блок-схема, дающая общее представление о способе позиционирования согласно изобретению, и
фиг.3 - увеличенная диаграмма, изображающая самую главную часть, представляющую позиционную зависимость между стационарной опорной станцией, перемещающейся опорной станцией и мобильным приемником на фиг.1.
Подробное описание предпочтительных вариантов осуществления
Предположим, что местоположения псевдолита и стационарной опорной станции получены заранее, а также, что код и фаза несущей сигнала, передаваемого с псевдолита, измеряются стационарной опорной станцией, перемещающейся опорной станцией и мобильным приемником, находящимся у пользователя. Данные кода и фазы несущей, которые измеряются стационарной опорной станцией, перемещающейся опорной станцией и мобильным приемником, передаются в процессор пользователя с помощью линии передачи данных. Процессор пользователя определяет базовую линию между стационарной опорной станцией и перемещающейся опорной станцией, а также базовую линию между перемещающейся опорной станцией и мобильным приемником, и, для определения положения мобильного приемника, использует две базовые линии и заранее известное местоположение стационарной опорной станции. Таким образом, даже в таких местах, как, например, закрытые помещения, в которых GPS сигнал не может быть принят, или в местах, скрытых от спутника, например, в таких как горы и леса, или позади высоких зданий в городах, в которых необходимое число GPS сигналов, требуемых для позиционирования, не может быть принято, может использоваться способ позиционирования, основанный на использовании фазы несущей. В результате, может быть выполнено точное позиционирование, имеющее погрешность всего от нескольких миллиметров до нескольких сантиметров, и, с помощью GPS сигналов, обеспечивается многоцелевое использование по сравнению с известным позиционированием.
Далее со ссылкой на фиг.1 - 3 будут подробно описаны варианты осуществления изобретения.
Фиг.1 представляет собой диаграмму, изображающую конфигурацию самой главной части одного варианта осуществления настоящего изобретения. Фиг.2 изображает блок-схему, дающую общее представление о способе позиционирования согласно изобретению. Фиг.3 представляет увеличенную диаграмму, изображающую самую главную часть, представляющую позиционную зависимость между стационарной опорной станцией 3, перемещающейся опорной станцией 4 и мобильным приемником 5, которые будут описаны ниже. В варианте осуществления пояснение будет даваться для случая, в котором позиционирование мобильного приемника 5 пользователя должно быть выполнено в закрытом помещении, в котором GPS сигнал не может быть принят.
На фиг.1 и 3 система 1 позиционирования в кинематическом режиме в реальном времени RTK использует способ позиционирования RTK для определения положения мобильного приемника 5 пользователя. Система 1 позиционирования RTK имеет четыре псевдолита 2, две опорные станции, включая стационарную опорную станцию 3 и перемещающуюся опорную станцию 4, мобильный приемник 5, процессор 6 пользователя и линию 7 передачи данных.
Псевдолит 2 используется в качестве источника сигналов, который действует как спутник. Для трехмерного позиционирования необходимо, по меньшей мере, четыре псевдолита 2, а для двумерного позиционирования необходимо, по меньшей мере, три псевдолита 2. В варианте осуществления используются псевдолиты, имеющиеся в продаже. Вместо псевдолита 2 может использоваться GPS-подобный спутник или же фиксированный источник сигнала с расширенным спектром. Источником сигналов с расширенным спектром может быть синхролит или ретранслятор GPS сигнала для передачи GPS-подобного спутникового сигнала или же аналогичный источник сигналов с расширенным спектром. Поскольку могут использоваться различные источники сигналов, можно обеспечить многоцелевое использование RTK системы.
Стационарная опорная станция 3 является фиксированной и функционирует в качестве опорной станции. Перемещающаяся опорная станция 4 постоянно перемещается и функционирует в качестве второй промежуточной опорной станции. Мобильный приемник 5 имеется у пользователя. В варианте осуществления стационарная опорная станция 3, перемещающаяся опорная станция 4 и мобильный приемник 5 имеют функцию GPS приемника, имеющегося в продаже, который может также измерять код и фазу несущей GPS сигнала. Четыре псевдолита 2 должны быть установлены и зарегистрированы опорными станциями 3 и 4 и мобильным приемником 5 так, чтобы они могли принимать и измерять сигналы от псевдолитов 2. Стационарная опорная станция 3, перемещающаяся опорная станция 4 и мобильный приемник 5 не ограничены GPS приемниками, имеющимися в продаже, и могут быть любыми приемниками, которые могут измерять код и фазу несущих сигналов, передаваемых с псевдолитов 2.
Процессор 6 пользователя использует данные, передаваемые от стационарной опорной станции 3, перемещающейся опорной станции 4 и мобильного приемника 5 для выполнения алгоритма обработки данных с целью определения положения мобильного приемника 5. В варианте осуществления используется стандартный компактный портативный компьютер, а алгоритм обработки данных, который будет описан ниже, установлен в качестве программного обеспечения. Вместе с тем, алгоритм обработки данных может быть выполнен во внутреннем процессоре мобильного приемника 5.
Линия 7 передачи данных используется для обмена данными между стационарной опорной станцией 3, перемещающейся опорной станцией 4, мобильным приемником 5 и процессором 6 пользователя. Таким образом, в варианте осуществления средство беспроводной связи включает в себя передатчик и приемник данных, которые присоединены или подключены к стационарной опорной станции 3, перемещающейся опорной станции 4 и мобильному приемнику 5. Могут использоваться проводные средства связи, например кабельные.
Теперь, со ссылкой на фиг.1-3, будет подробно описано действие системы 1 позиционирования RTK.
Перед позиционированием четыре псевдолита 2 устанавливаются соответственно по четырем углам ограниченной области пространства. Каждое местоположение псевдолитов 2 измеряется, чтобы быть заранее известным процессору 6 пользователя. Стационарная опорная станция 3 и перемещающаяся опорная станции 4 устанавливаются в произвольных местоположениях в ограниченной области пространства. Местоположение стационарной опорной станции 3 измеряется, чтобы быть заранее известным процессору 6 пользователя.
Как показано на фиг.1 и фиг.3, сплошная линия указывает местоположение перемещающейся опорной станции 4 во время периода k, а пунктирная линия указывает местоположение перемещающейся опорной станции 4 во время периода
(k+1). То есть перемещающаяся опорная станция 4 расположена таким образом, что двигается по кругу, радиус которого имеет заданное значение "R" и в центре которого расположена стационарная опорная станция 3. Круг лежит в той же самой плоскости, что и стационарная опорная станция 3. Однако, если перемещающаяся опорная станция 4 постоянно перемещается, такое ограничение перемещения не является необходимым, и перемещающаяся опорная станция 4 может перемещаться произвольным образом.
Однако вышеупомянутая позиционная зависимость между приемником 3 фиксированной опорной станции и приемником 4 перемещающейся опорной станции является предпочтительной. Если перемещающийся опорный приемник 4 движется по той же самой плоскости, что и стационарная опорная станция 3, то может быть введен параметр высоты перемещающейся опорной станции 4 для позиционирования мобильного приемника 5. Далее, если перемещающаяся опорная станция 4 движется по окружности, то расстояние между стационарной опорной станцией 3 и перемещающейся опорной станцией 4 устанавливается постоянным и имеет заданное значение, поскольку перемещающаяся опорная станция 4 движется по конкретной траектории перемещения. В результате еще уменьшается число неизвестных параметров, используемых для анализа базовой линии. Таким образом, анализ базовой линии, выполняемый для определения положения мобильного приемника 5, значительно упрощается.
Для позиционирования инициализация стационарной опорной станции 3 и перемещающейся опорной станции 4 выполняется заранее. Более практичным оказывается, если инициализация автоматически выполняется оперативно, что хорошо известно для способа позиционирования RTK. Однако для инициализации необходимы, по меньшей мере, пять псевдолитов 2, а также псевдолиты 2 должны ретранслировать сигналы в двух различных полосах частот L1 и L2.
Режим позиционирования оперативно является практичным, потому что он подходит не только для автоматической инициализации, выполняемой перед началом позиционирования, но также и для инициализации, которая может потребоваться вследствие мгновенного прерывания или остановки приема сигнала со спутника, которые могут случиться в процессе позиционирования.
В системе 1 позиционирования RTK пользователь имеет мобильный приемник 5, процессор 6 пользователя и часть линии 7 передачи данных (участок, присоединенный или подключенный к мобильному приемнику 5). По мере того как пользователь движется, указанные модули перемещаются по ограниченной области пространства. Позиционирование мобильного приемника 5 начинают выполнять, когда пользователь входит в ограниченную область пространства.
Сначала коды и фаза несущих сигналов, передаваемых с четырех псевдолитов 2, расположенных в ограниченной области пространства, измеряются стационарной опорной станцией 3, перемещающейся опорной станцией 4 и мобильным приемником 5.
Данные кодов и фазы несущих сигналов, измеренных стационарной опорной станцией 3, перемещающейся опорной станцией 4 и мобильным приемником 5, передаются в процессор 6 пользователя с помощью линии 7 передачи данных.
Процессор 6 пользователя через интерфейс принимает измеренные данные, передаваемые со стационарной опорной станции 3, перемещающейся опорной станции 4 и мобильного приемника 5 (этап 21 на фиг.2). Затем для определения местоположения мобильного приемника 5 процессор 6 пользователя, используя алгоритм обработки данных, выполняет следующие этапы.
Процессор 6 пользователя осуществляет сортировку измеренных данных для извлечения необходимых данных из измеренных данных (этап 22). Затем процессор 6 пользователя инициализирует коды (этап 23) и определяет положение мобильного приемника 5 посредством фазы несущей (этап 24).
Для позиционирования важно, чтобы перемещающаяся опорная станция 4 постоянно двигалась. В варианте осуществления для выполнения позиционирования RTK вместо спутников в фиксированных местоположениях ограниченной области пространства устанавливаются псевдолиты 2, используемые в качестве источников сигналов. Таким образом, поскольку псевдолиты 2, действующие в качестве источников сигналов, являются фиксированными, геометрия не изменяется, и неоднозначность не может быть определена. Однако, когда перемещающаяся опорная станция 4 движется, изменяется геометрия между перемещающейся опорной станцией 4 и стационарной опорной станцией 3, а также между перемещающейся опорной станцией 4 и мобильным приемником 5. Таким образом, может быть определена базовая линия А между стационарной опорной станцией 3 и перемещающейся опорной станцией 4, а также базовая линия B между перемещающейся опорной станцией 4 и мобильным приемником 5. Базовая линия C представляет собой базовую линию между стационарной опорной станцией 3 и мобильным приемником 5.
Поскольку базовые линии А и B, а также местоположение стационарной опорной станции 3 заранее известны процессору 6 пользователя, может быть выполнено позиционирование мобильного приемника 5.
Процессор 6 пользователя отображает найденное местоположение мобильного приемника 5 (этап 25). Далее процессор 6 пользователя генерирует NMEA данные, которые являются стандартами для связи между GPS приемником и навигационным устройством, в отношении определенного положения мобильного приемника 5 (этап 26).
Для пояснения основа алгоритма обработки данных описывается следующим образом.
Прежде всего, относительная неоднозначность между мобильным приемником 5 и стационарной опорной станцией 3 представляется следующим уравнением (1):

В вышеупомянутом уравнении (1):
||X||o - вектор координат мобильного приемника 5;
||X||1 - вектор координат стационарной опорной станции 3;
||N||10 - вектор для DD (удвоенной разности фаз) неоднозначности базовой линии C (базовой линии между мобильным приемником 5 и стационарной опорной станцией 3);
||N||12 - вектор для DD (удвоенной разности фаз) неоднозначности базовой линии А (базовой линии между стационарной опорной станцией 3 и перемещающейся опорной станцией 4);
||N||20 - вектор для DD (удвоенной разности фаз) неоднозначности базовой линии B (базовой линии между перемещающейся опорной станцией 4 и мобильным приемником 5);
||В||12 - базовая линия А (базовая линия между стационарной опорной станцией 3 и перемещающейся опорной станцией 4);
||В||20 - базовая линия B (базовая линия между перемещающейся опорной станцией 4 и мобильным приемником 5).
Координатный вектор ||Х||1 для стационарной опорной станции 3 задается как уже установленный (модуль mod(||B||12) длины базовой линии для базовой линии А между стационарной опорной станцией 3 и перемещающейся опорной станцией 4 может также уже быть установлен).
Следующие уравнения (2) и (3) должны быть решены относительно ||В||20, ||В||12,
||N||20, ||N||12:


В уравнениях (2) и (3):
P20 - DD (удвоенная разность фаз) для псевдорасстояния (псевдодальности) (псевдорасстояние между перемещающейся опорной станцией 4 и мобильным приемником 5);
P12 - величина DD (удвоенной разности фаз) для псевдорасстояния (псевдорасстояние между стационарной опорной станцией 3 и перемещающейся опорной станцией 4);
С20 - величина DD (удвоенной разности фаз) для фазы несущей (фаза несущей между перемещающейся опорной станцией 4 и мобильным приемником 5);
С12 - величина DD (удвоенной разности фаз) для фазы несущей (фаза несущей между стационарной опорной станцией 3 и перемещающейся опорной станцией 4);
[|A20|](k) - матрица плана (матрица плана между перемещающейся опорной станцией 4 и мобильным приемником 5);
[|A20|](k) - матрица плана (матрица плана между стационарной опорной станцией 3 и перемещающейся опорной станцией 4).
Число уравнений для каждой системы равно 2k(m-1), где m обозначает число псевдолитов, а k обозначает число периодов. В то время как одного периода достаточно, чтобы решить уравнение, описывающее четыре псевдолита, полученное решение является ограниченным в зависимости от точности псевдорасстояния.
Чтобы разрешить неоднозначность, из конфигурации удаляется уравнение для менее точного псевдорасстояния, а уравнение для фазы несущей используется только для определения исходной области, которая может быть проанализирована.
Выражения, из которых уравнение для псевдорасстояния удалено, представлены следующими уравнениями (4) и (5):
Следующие уравнения (6) и (7), представляющие исходное решение, выводятся из уравнений (2) и (3):
К системе, описанной выше, может быть добавлено следующее уравнение (8):

Следует отметить, что в вышеупомянутом уравнении (8) для внутреннего позиционирования вектор ||B||12(k) имеет только две составляющие X и Y.
Число уравнений (ранг матрицы) в уравнениях (4) и (5) равно (m-1)k, где m обозначает число псевдолитов, a k обозначает число периодов.
Таким образом, общее число N уравнений, включенных в выражение 8, равно N=(2m-l)k.
Неизвестное число М равно: М=5k+2m-2.
Таким образом, когда М≤N, координаты для указанной системы могут быть найдены, и неоднозначность устранена.
Число псевдолитов должно быть m≥4, а число периодов должно быть k≥3.
Когда предполагается, что пользователь не перемещается по вертикали, М=4k+2m-2, поскольку вектор ||B||20(k) также имеет только составляющие X и Y.
Таким образом, когда минимально необходимое число псевдолитов уменьшено до m≥3, число периодов составляет k≥4, а когда число псевдолитов m≥4, число периодов составляет k≥2.
В рассмотренном варианте осуществления используется перемещающаяся опорная станция 4. Теперь, для сравнения с упомянутым вариантом осуществления, будет пояснен другой вариант осуществления, в котором не используется перемещающаяся опорная станция 4. Уравнение, не включающее перемещающуюся опорную станцию 4, не может быть решено вообще, независимо от того, сколько псевдолитов обеспечено. Это происходит потому, что уравнение, рассматривающее последовательные периоды, должно было представлять линейную зависимость, а ранг системы не возрастает. Когда используется перемещающаяся опорная станция 4, матрица плана ||F12||(k) и ||F20||(k) изменяется для каждого периода, и уравнение, описывающее последовательные периоды, не представляет линейной зависимости.
Обычно период, необходимый для способа позиционирования RTK, короче, чем для другого способа позиционирования, и для нормального позиционирования на открытых участках пространства необходимо время от одной секунды до одной минуты. Согласно изобретению, поскольку источники сигналов значительно ближе к индивидуальным приемникам, геометрия существенно изменяется по мере того, как движется перемещающаяся опорная станция 4, так что неоднозначность может быть определена быстрее.
В упомянутом варианте осуществления пояснение давалось для примера, в котором GPS сигнал ретранслировался псевдолитами в ограниченной области пространства, в которой GPS сигнал не может быть принят и в которой местоположение мобильного приемника 5 пользователя рассчитывается при условии, что единственными источниками сигналов являются псевдолиты. Однако настоящее изобретение не ограничено упомянутым вариантом осуществления, и мобильный приемник 5 даже может быть калиброван на открытых участках пространства, в местоположении, в котором сигнал не может быть принят со спутника, то есть в так называемом географически скрытом месте.
Кроме того, согласно изобретению GPS приемники, имеющиеся в продаже, могут использоваться в качестве стационарной опорной станции 3, перемещающейся опорной станции 4 и мобильного приемника 5, чтобы также принимать сигналы от псевдолитов. Таким образом, согласно изобретению система позиционирования и способ позиционирования для нее могут использоваться не только в тех местах, в которых GPS сигнал не может быть принят, но также и на открытых участках пространства, где необходимое число сигналов, требуемых для позиционирования не может быть принято со спутника, и можно осуществить калибровку мобильного приемника 5, используя псевдолиты вместо спутника.
Вместо псевдолитов источниками сигналов могут быть стационарные спутники, например спутники WAAS, запущенные Соединенными Штатами, MSAS, запущенные Японией, или EGNOS, запущенные Европой, а также квазистационарные спутники типа QZSS, запущенные Японией.
Кроме того, псевдолит использует режим множественного доступа с частотным разделением каналов (МДЧР), а также использует имеющуюся системную частоту. Таким образом, псевдолит может принимать сигналы не только от GPS спутников, запущенных Соединенными Штатами, но также и от навигационных спутников, типа GLONASS, запущенных Россией, GALILEO, запущенных Европой, стационарных спутников типа WAAS, запущенных Соединенными Штатами, MSAS, запущенных Японией, EGNOS, запущенных Европой, а также квазистационарных спутников типа QZSS, запущенных Японией. Следовательно, когда псевдолит принимает и ретранслирует указанные сигналы, система и способ позиционирования настоящего изобретения может использовать сигналы, передаваемые всеми навигационными спутниками, стационарными спутниками и квазистационарными спутниками.
Далее, поскольку псевдолит применяет пространственное разделение спутников, псевдолит может использовать сигналы, передаваемые навигационными спутниками, например, типа GLONASS, запущенными Россией, и GALILEO, запущенными Европой, стационарными спутниками типа WAAS, запущенными Соединенными Штатами, спутниками MSAS, запущенными Японией, EGNOS, запущенными Европой, и квазистационарными спутниками типа QZSS, запущенными Японией. Таким образом, когда псевдолит принимает и ретранслирует указанные сигналы, система и способ позиционирования изобретения может использовать сигналы, передаваемые навигационными спутниками, стационарными спутниками и квазистационарными спутниками.
При условии, что установлены два или более мобильных приемника 5, в случае, когда нет перемещающейся опорной станции 4, функция опорной станции дополнительно обеспечивается одним из мобильных приемников 5, для того, чтобы указанный мобильный приемник 5 служил в качестве второй промежуточной опорной станции, то есть перемещающейся опорной станции 4.
Изобретение относится к системе позиционирования в кинематическом режиме в реальном времени, применяющей псевдолиты. Достигаемым техническим решением является повышение точности позиционирования. Сущность изобретения заключается в том, что местоположения псевдолитов и местоположение стационарной опорной станции заранее известны процессору пользователя, а коды и фазы несущих сигналов, передаваемых с псевдолитов, измеряются стационарной опорной станцией, перемещающейся опорной станцией и мобильным приемником. Данные кодов и фазы несущей, измеренные стационарной опорной станцией, перемещающейся опорной станцией и мобильным приемником, передаются в процессор пользователя с помощью линии передачи данных. Процессор пользователя определяет базовую линию между стационарной опорной станцией и перемещающейся опорной станцией, а также базовую линию между перемещающейся опорной станцией и мобильным приемником. Две базовые линии и заранее известное местоположение стационарной опорной станции используются для определения положения мобильного приемника. 3 н. и 37 з.п. ф-лы, 3 ил.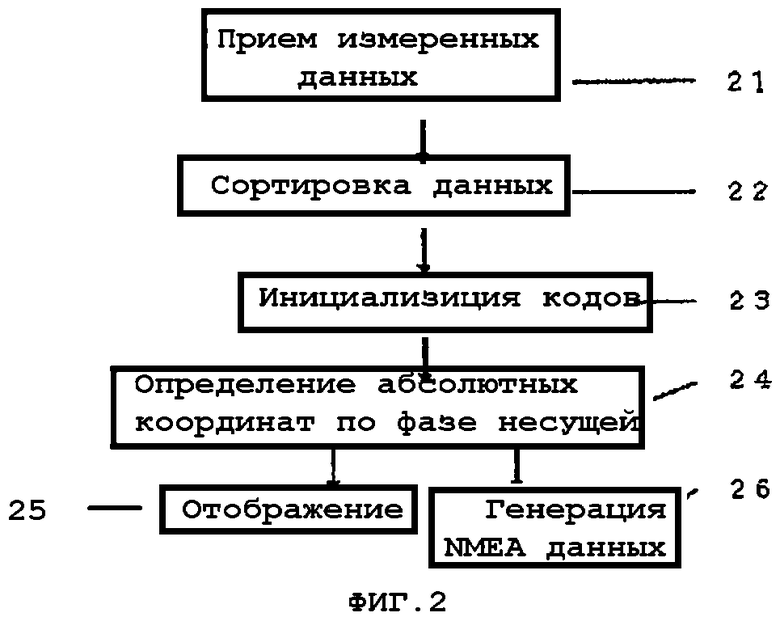
1. Система позиционирования в кинематическом режиме в реальном времени (RTK), которая определяет положения с помощью псевдолитов, заменяющих спутники глобальной системы позиционирования GPS, содержащая множество псевдолитов, каждый из которых расположен в заданном положении, мобильный приемник для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов, стационарную опорную станцию, расположенную в заданном положении и предназначенную для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов, перемещающуюся опорную станцию для измерения кода и фазы несущих сигналов, передаваемых с каждого из псевдолитов, а также для перемещения, процессор пользователя для позиционирования мобильного приемника на основе кода и фазы несущей, передаваемых из стационарной опорной станции и перемещающейся опорной станции соответственно, а также кода и фазы несущей, передаваемых с мобильного приемника, и линию передачи данных для передачи всех данных от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника в процессор пользователя, причем процессору пользователя известно положение стационарной опорной станции и каждое положение псевдолита.
2. Система позиционирования по п.1, отличающаяся тем, что для трехмерного позиционирования мобильного приемника используются, по меньшей мере, четыре псевдолита, а для двумерного позиционирования мобильного приемника используются, по меньшей мере, три псевдолита.
3. Система позиционирования в кинематическом режиме в реальном времени (RTK), которая определяет положения с помощью спутника глобальной системы позиционирования GPS и псевдолита, содержащая GPS спутник, по меньшей мере, один псевдолит, каждый из которых расположен в заданном положении, мобильный приемник для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита, стационарную опорную станцию, расположенную в заданном положении и предназначенную для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита, перемещающуюся опорную станцию для измерения кода и фазы несущих сигналов, передаваемых с каждого GPS спутника и псевдолита, а также для перемещения, процессор пользователя для позиционирования мобильного приемника на основе кода и фазы несущих, передаваемых из стационарной опорной станции и перемещающейся опорной станции соответственно, а также кода и фазы несущей, передаваемых из мобильного приемника, и линию передачи данных для передачи всех данных от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника в процессор пользователя, причем процессору пользователя известно положение стационарной опорной станции и положения псевдолита.
4. Система позиционирования по п.3, отличающаяся тем, что для трехмерного позиционирования мобильного приемника используется, по меньшей мере, четыре спутника, включая GPS спутник и псевдолит, а для двумерного позиционирования мобильного приемника используется, по меньшей мере, три спутника, включая GPS спутник и псевдолит.
5. Система позиционирования по п.1 или 3, отличающаяся тем, что псевдолит передает данные, переданные от GPS спутников, и стационарная опорная станция, перемещающаяся опорная станция и мобильный приемник имеют функцию GPS приемника.
6. Система позиционирования по п.1 или 3, отличающаяся тем, что псевдолит использует множественный доступ с частотным разделением каналов (МДЧР) и ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник.
7. Система позиционирования по п.1 или 3, отличающаяся тем, что псевдолит ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник, используя пространственное разделение спутников.
8. Система позиционирования по п.1 или 3, отличающаяся тем, что по меньшей мере один из псевдолитов является GPS-подобным спутником.
9. Система позиционирования по п.1 или 3, отличающаяся тем, что по меньшей мере один из псевдолитов является фиксированным источником сигналов с расширенным спектром.
10. Система позиционирования по п.1 или 3, отличающаяся тем, что по меньшей мере один из псевдолитов является стационарным спутником или квазистационарным спутником.
11. Система позиционирования по п.9, отличающаяся тем, что фиксированным источником сигналов с расширенным спектром является синхролит.
12. Система позиционирования по п.9, отличающаяся тем, что фиксированным источником сигналов с расширенным спектром является ретранслятор GPS сигналов.
13. Система позиционирования по п.12, отличающаяся тем, что ретранслятор GPS сигналов передает GPS-подобный сигнал.
14. Система RTK позиционирования по п.12, отличающаяся тем, что ретранслятор GPS сигналов передает сигнал с расширенным спектром, аналогичный GPS-подобному сигналу.
15. Система позиционирования по п.1 или 3, отличающаяся тем, что используются пять псевдолитов, и псевдолит ретранслирует сигналы в двух различных полосах частот, и положение перемещающейся опорной станции определяется оперативно.
16. Система позиционирования по п.1 или 3, отличающаяся тем, что перемещающаяся опорная станция перемещается по кругу, в центре которого расположена стационарная опорная станция.
17. Система позиционирования по п.1 или 3, отличающаяся тем, что процессор пользователя является процессором внутри мобильного приемника.
18. Система позиционирования по п.1 или 3, отличающаяся тем, что процессором пользователя является компьютер, связанный с мобильным приемником.
19. Система позиционирования по п.1 или 3, отличающаяся тем, что линия передачи данных представляет собой беспроводную линию связи.
20. Система позиционирования по п.1 или 3, отличающаяся тем, что линия передачи данных представляет собой проводную линию связи.
21. Система позиционирования по п.1 или 3, отличающаяся тем, что используется, по меньшей мере, два мобильных приемника и один из мобильных приемников, с помощью которого обеспечивается функция опорной станции, используется в качестве перемещающейся опорной станции.
22. Способ позиционирования в кинетическом режиме в реальном времени (RTK), заключающийся в том, что устанавливают положения псевдолитов, которые должны быть заранее известны процессору пользователя, и устанавливают положение стационарной опорной станции, которое должно быть известно процессору пользователя, измеряют код и фазу несущих сигналов, передаваемых с псевдолитов, с помощью стационарной опорной станции, перемещающейся опорной станции и мобильного приемника, который находится у пользователя, соответственно, передают данные кода и данные фазы несущей, соответственно измеренные в стационарной опорной станции, перемещающейся опорной станции и мобильном приемнике, в процессор пользователя с помощью линии передачи данных, позиционируют мобильный приемник на основе кода и фазы несущих, передаваемых от стационарной опорной станции, перемещающейся опорной станции и мобильного приемника.
23. Способ RTK позиционирования по п.22, отличающийся тем, что
при трехмерном позиционировании мобильного приемника сигналы передают с четырех псевдолитов, а при двумерном позиционировании мобильного приемника сигналы передают с трех псевдолитов.
24. Способ позиционирования по п.22, отличающийся тем, что псевдолит передает данные, переданные от спутников глобальной системы позиционирования GPS, и стационарная опорная станция, перемещающаяся опорная станция и мобильный приемник имеют функцию GPS приемника.
25. Способ позиционирования по п.22, отличающийся тем, что псевдолит использует множественный доступ с частотным разделением каналов (МДЧР) и ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник.
26. Способ позиционирования по п.22, отличающийся тем, что псевдолит ретранслирует данные, передаваемые со всех навигационных спутников, геостационарных спутников и квазистационарных спутников, включая GPS спутник, используя пространственное разделение спутников.
27. Способ позиционирования по п.22, отличающийся тем, что по меньшей мере, один из псевдолитов является GPS-подобным спутником.
28. Способ позиционирования по п.22, отличающийся тем, что по меньшей мере, один из псевдолитов является фиксированным источником сигналов с расширенным спектром.
29. Способ позиционирования по п.22, отличающийся тем, что по меньшей мере, один из псевдолитов является стационарным спутником или квазистационарным спутником.
30. Способ позиционирования по п.28, отличающийся тем, что фиксированным источником сигналов с расширенным спектром является синхролит.
31. Способ позиционирования по п.28, отличающийся тем, что фиксированным источником сигналов с расширенным спектром является ретранслятор GPS сигналов.
32. Способ позиционирования по п.31, отличающийся тем, что ретранслятор GPS сигналов передает GPS-подобный сигнал.
33. Способ позиционирования по п.31, отличающийся тем, что ретранслятор GPS сигналов передает сигнал с расширенным спектром, аналогичный GPS-подобному сигналу.
34. Способ позиционирования по п.22, отличающийся тем, что используют пять псевдолитов, и псевдолит ретранслирует сигналы в двух различных полосах частот, и положение перемещающейся опорной станции определяют оперативно.
35. Способ позиционирования по п.22, отличающийся тем, что перемещающаяся опорная станция перемещается по кругу, в центре которого расположена стационарная опорная станция.
36. Способ позиционирования по п.22, отличающийся тем, что процессор пользователя является процессором внутри мобильного приемника.
37. Способ позиционирования по п.22, отличающийся тем, что процессором пользователя является компьютер, связанный с мобильным приемником.
38. Способ позиционирования по п.22, отличающийся тем, что линия передачи данных представляет собой беспроводную линию связи.
39. Способ позиционирования по п.22, отличающийся тем, что линия передачи данных представляет собой проводную линию связи.
40. Способ позиционирования по п.22, отличающийся тем, что используют, по меньшей мере, два мобильных приемника и один из мобильных приемников, с помощью которого обеспечивают функцию опорной станции, используют в качестве перемещающейся опорной станции.
| WO 03040752 А1, 15.05.2003 | |||
| US 6531981 В1, 11.03.2003 | |||
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| ПРИЕМНИК ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ С ОГРАНИЧЕННЫМ ПРОСТРАНСТВОМ ПОИСКА КОДОВОГО СДВИГА ДЛЯ СОТОВОЙ ТЕЛЕФОННОЙ СИСТЕМЫ | 1998 |
|
RU2197780C2 |

