Перекрестная ссылка на родственные заявки
Эта заявка является частичным продолжением заявки 11/345124 от 31 января 2006 г., которая является частичным продолжением заявки 10/757340 от 13 января 2004 г., включенных в настоящее описание во всей полноте в качестве ссылки.
Область техники, к которой относится изобретение
Данное изобретение относится, в общем смысле, к технологиям, связанным с позиционированием и навигацией посредством спутников, и, более конкретно, к разрешению плавающей неоднозначности несущей в региональной, широкомасштабной или глобальной системе позиционирования и/или навигации по фазе несущей.
Уровень техники
Глобальная система позиционирования (GPS) использует спутники в космосе для обнаружения объектов на земле. Согласно GPS сигналы со спутников достигают GPS-приемника и используются для определения местоположения GPS-приемника. В настоящее время для гражданских GPS-приемников доступны два типа GPS-измерений, соответствующих каждому каналу коррелятора с захваченным спутниковым GPS-сигналом. Этими двумя типами GPS-измерений являются измерение псевдодальности и измерение интегрированной фазы несущей для двух сигналов несущих L1 и L2 с частотами 1,5754 ГГц и 1,2276 ГГц или длинами волны 0,1903 м и 0,2442 м соответственно. Измерение псевдодальности (или кодовое измерение) является основной наблюдаемой величиной GPS, доступной GPS-приемникам любого типа. В нем применяются C/A или P-коды, модулированные на сигналах несущих. Измерение регистрирует фактическое время, затраченное на прохождение соответствующего кода от спутника до приемника; т.е. время, когда сигнал достиг приемника согласно часам приемника, минус время, в которое сигнал вышел из спутника согласно часам спутника. Измерение фазы несущей происходит путем интегрирования восстановленной несущей сигнала, когда он поступает в приемник. Таким образом, измерение фазы несущей является также мерой временной разности пробега, определенной временем, когда сигнал покинул спутник согласно часам спутника, и временем, когда он достиг приемника согласно часам приемника. Однако в виду того что исходное число полных циклов в пробеге между спутником и приемником, когда приемник начинает отслеживание фазы несущей сигнала, обычно неизвестно, разница времени пробега может содержать ошибку на множество циклов несущей, т.е. в измерении фазы несущей возникает неоднозначность по числу циклов.
Если GPS-измерения доступны, дальность или расстояние от GPS-приемника до каждого из множества спутников рассчитываются путем умножения времени прохождения сигнала на скорость света. Эти дальности обычно называют псевдодальностями (ложными дальностями), потому что часы приемника обычно имеют существенную временную ошибку, вызывающую общее смещение в измеренном диапазоне. Это общее смещение из-за ошибки часов приемника разрешается вместе с координатами местоположения приемника в рамках нормального навигационного вычисления. Различные прочие факторы также могут приводить к ошибкам или шумам в рассчитанной дальности, включая ошибку эфемерид, ошибку времени часов спутника, атмосферные эффекты, шум приемника и ошибку многолучевого распространения. Согласно автономной GPS-навигации, где пользователь с GPS-приемником получает кодовые дальности и/или дальности фазы несущей относительно нескольких спутников в зоне видимости без согласования с какой-либо опорной станцией, пользователь очень ограничен в возможностях сократить ошибки или шумы в дальностях.
Для устранения или сокращения этих ошибок в GPS-приложениях типично используются дифференциальные операции. Дифференциальные GPS (DGPS) операции типично связаны с центральным опорным GPS-приемником, пользовательским (или навигационным) GPS-приемником и каналом связи между опорным и пользовательским приемниками. Опорный приемник располагается в известном месте, и его известное местоположение используется для генерации коррекций, связанных с некоторыми или всеми из вышеуказанных факторов ошибок. Коррекции предоставляются пользовательскому приемнику, и пользовательский приемник затем использует эти коррекции для того, чтобы надлежащим образом скорректировать свои вычислительные координаты. Коррекции могут быть в виде коррекций к местоположению опорного приемника, определенного в опорной позиции, или в виде коррекций к часам и/или орбите конкретного GPS-спутника. Дифференциальные операции, использующие измерения фазы несущей, часто называют кинематическими в реальном времени (RTK) операциями навигации/позиционирования.
Фундаментальная концепция дифференциального GPS (DGPS) заключается в том, чтобы воспользоваться преимуществом пространственных и временных корреляций ошибок, присущих GPS-измерениям, для подавления шумовых факторов в измерениях псевдодальности и/или фазы несущей, вытекающих из этих факторов ошибок. Однако в то время как ошибка синхронизации часов GPS-спутника, проявляющаяся в смещении измерения псевдодальности или фазы несущей, идеально коррелирует между опорным приемником и пользовательским приемником, большая часть других факторов ошибок либо не коррелируется, либо их корреляция уменьшается в широкомасштабных приложениях, т.е. когда расстояние между опорным и пользовательским приемниками становится большим.
Для преодоления неточности DGPS-системы в широкомасштабных приложениях разработаны различные методы регионального, широкомасштабного или глобального DGPS (далее - широкомасштабные DGPS или WADGPS). WADGPS включает в себя сеть множества опорных станций, осуществляющих связь с вычислительным центром или концентратором. Коррекции ошибок вычисляются в концентраторе на основе известных местоположений опорных станций и измерений, выполненных ими. Затем вычисленные коррекции ошибок передаются пользователям через такой канал связи, как спутник, телефон или радио. При использовании более одной опорной станции WADGPS предоставляет более точные оценки коррекции ошибок.
Таким образом, для получения высокоточной дифференциальной навигации с использованием GPS-измерений фазы несущей разработан ряд различных методов. RTK-метод имеет типичную точность около одного сантиметра. Однако для того чтобы получить эту точность, в дифференциальных измерениях фазы несущей должна быть разрешена полноцикловая неоднозначность. Когда расстояние между пользовательским приемником и опорным приемником (базисное расстояние) невелико, RTK-метод имеет значительное преимущество, потому как в этом случае полноцикловая неоднозначность может быть разрешена не только точно, но и быстро. С другой стороны, когда базисное расстояние больше нескольких десятков километров, определение полноцикловой неоднозначности может стать невозможным, и нормальная RTK-точность недостижима. Другое ограничение RTK-метода в том, что для него необходимо, чтобы между опорным приемником и навигационным приемником поддерживался локальный радиоканал.
WADGPS-методы, которые применяют дифференциальный способ фазы несущей, также могут достигать очень высокой навигационной точности. Дифференциальные WADGPS-методы также характеризуются надежными низкочастотными каналами связи дальнего действия или надежными спутниковыми каналами связи. Таким образом, коррекции, как правило, могут быть переданы навигационным приемникам без существенных прерываний. Однако WADGPS-методы обычно рассматривают полноцикловые неоднозначности как действительную (нецелую) переменную и находят «плавающую неоднозначность», которая обычно очень плохо определяется, пока не будут получены данные измерений, покрывающие промежуток времени существенного изменения спутниковой геометрии. Таким образом, в WADGPS-приложении при нахождении «плавающей неоднозначности» часто требуется промежуток времени не меньше одного-двух часов на то, чтобы достичь точности менее 10 сантиметров в местоположении навигации.
Точное позиционирование (<1см) также может быть получено посредством локальной системы позиционирования. Стандартные локальные системы позиционирования, использующие активные или пассивные компоненты, включают в себя акустические и лазерные дальномерные системы, например, основанные на времени полета для сигналов и/или доплеровском сдвиге частоты. Акустические системы типично используют ориентиры и/или радиомаяки для измерения дальности внутри сети устройств, некоторые из которых фиксированы для формирования локальной системы координат. К сожалению, в виду свойств распространения звука в воздухе акустические системы могут измерять дальность лишь с точностью до сантиметра или больше и только на относительно небольших расстояниях. В локальных системах позиционирования на основе лазеров применяются измерения как угла, так и дальности между устройством и одним или более отражающими объектами (например, призмами) для триангуляционного или трилатерационного определения местоположения устройства. Дальность эффективного действия локальных систем позиционирования на основе лазеров также типично ограничивается относительно небольшим расстоянием (порядка 1000-10000 м).
Сущность изобретения
Данная заявка включает в себя способ комбинированного использования навигационных методов RTK и WADGPS так, чтобы слабости каждого метода компенсировались сильными сторонами другого метода. Главный недостаток WADGPS-метода заключается в том, что определение значений плавающей неоднозначности, которые требуются для преобразования измерений фазы несущей в точное измерение дальности, у навигационного приемника имеет большую продолжительность (часто более часа). Главные недостатки RTK-метода заключаются в том, что для него требуется канал передачи данных в реальном времени (обычно прямой видимости) между пользовательским GPS-приемником и опорным GPS-приемником, и в том, что полноцикловая неоднозначность может быть разрешена только тогда, когда территориальный разнос между опорным GPS-приемником и пользовательским GPS-приемником относительно мал.
Эти отдельные недостатки могут быть устранены при использовании способа комбинированного использования навигационных методов RTK и WADGPS в соответствии с одним из вариантов осуществления данного изобретения. Способ включает в себя использование известного местоположения пользовательского приемника для инициализации значений плавающей неоднозначности в WADGPS-системе. Когда пользовательский приемник стационарен, известное местоположение пользовательского приемника может быть разведанным местоположением или местоположением, полученным из предыдущей операции. Когда пользовательский приемник перемещается, известное место может быть получено посредством RTK-системы.
Таким образом, в комбинированной операции, когда доступен канал связи для локальной системы позиционирования и/или RTK-навигации, выходные сигналы местоположения, скорости и времени (PVT) пользовательского приемника могут быть получены посредством локальной системы определения местоположения и/или RTK-системы, при этом WADGPS-система в фоновом режиме работает, и ее выходные сигналы постоянно инициализируются для согласования с выходными сигналами RTK-системы. Когда канал связи для локальной системы позиционирования потерян, выходные сигналы PVT пользовательского приемника могут быть получены посредством RTK-системы и/или WADGPS-системы, которая была инициализирована, пока действовала локальная система позиционирования. Когда канал связи для RTK-навигации потерян или пользовательский приемник отходит слишком далеко от опорной станции в RTK-системе, выходные сигналы PVT пользовательского приемника могут быть получены посредством WADGPS-системы, которая была инициализирована, пока действовала RTK. Такая инициализация помогает избежать нормального времени «втягивания» от пятнадцати минут до двух часов, необходимого на нахождение значений плавающей неоднозначности, когда местоположение пользовательского GPS-приемника неизвестно. Это обеспечивает очень точные PVT-решения от WADGPS-системы, пока локальная система позиционирования и/или RTK-система недоступны или неточны, и делает WADGPS-метод более практичным для осуществления целей высокоточных навигации и позиционирования в реальном времени.
Краткое описание чертежей
На фиг.1 показана структурная схема комбинации WADGPS-системы, локальной системы позиционирования и локальной RTK-системы в соответствии с одним из вариантов осуществления данного изобретения.
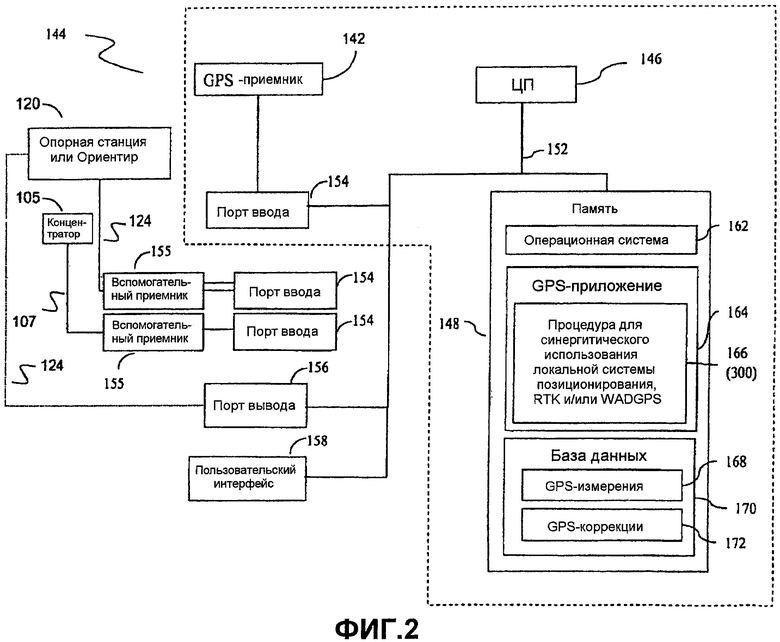
На фиг.2 показана структурная схема компьютерной системы, связанной с пользовательским GPS-приемником.
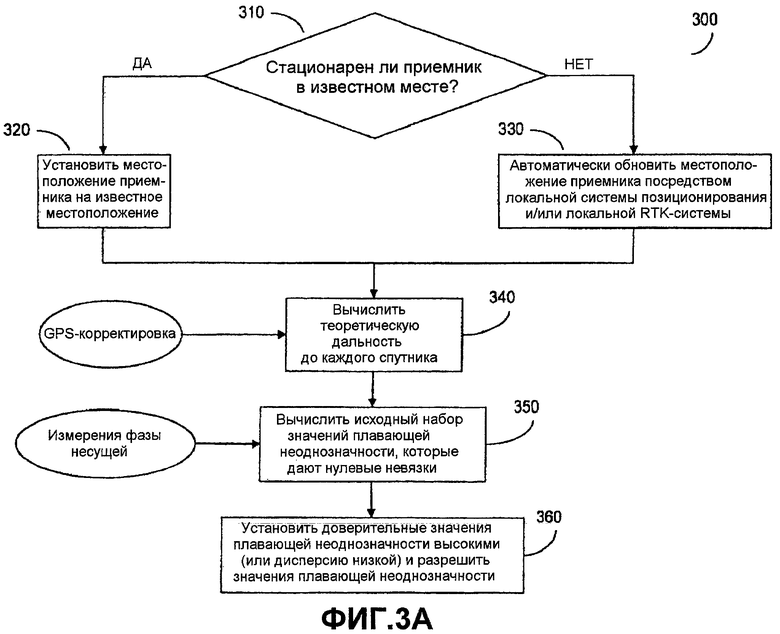
На фиг.3A показана блок-схема, иллюстрирующая способ комбинирования использования WADGPS-системы, локальной RTK-системы и/или локальной системы позиционирования.
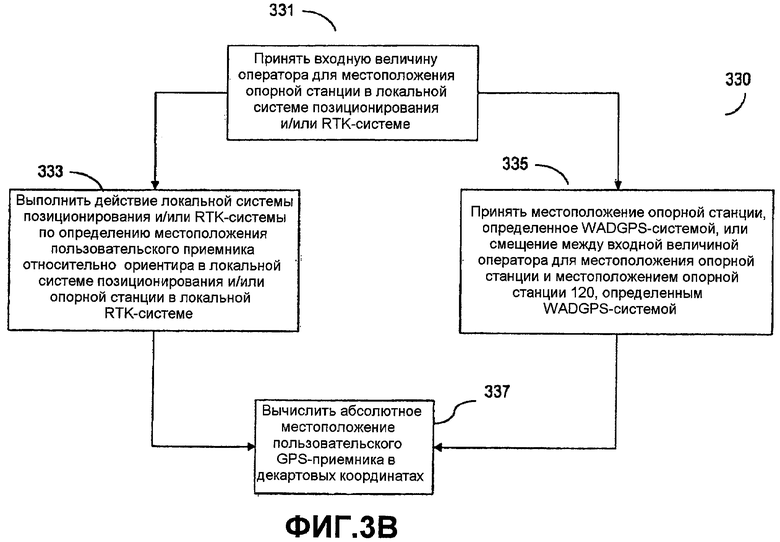
На фиг.3B показана блок-схема, иллюстрирующая способ обновления местоположения приемника посредством локальной RTK-системы.
На фиг.4A показана блок-схема, иллюстрирующая последовательность операций для комбинированного использования WADGPS-системы и локальной RTK-системы.
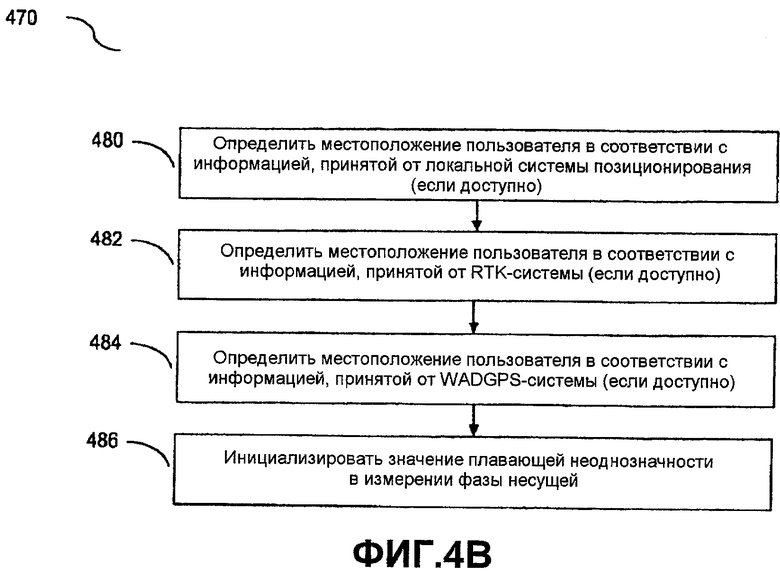
На фиг.4B показана блок-схема, иллюстрирующая последовательность операций для использования локальной системы позиционирования, локальной RTK-системы и/или WADGPS-системы.
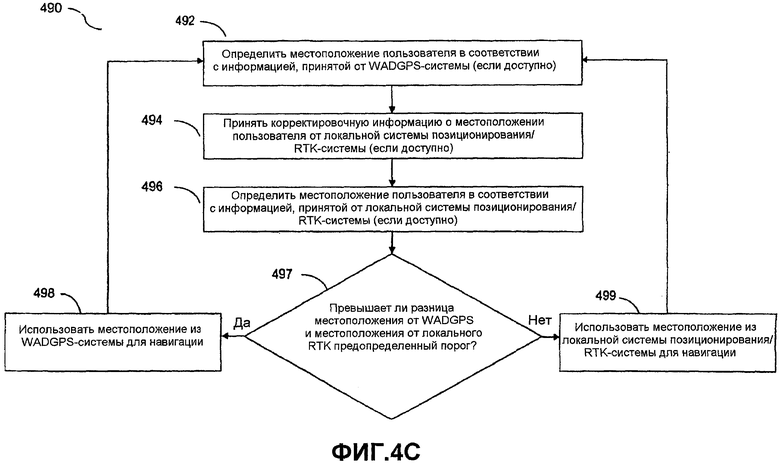
На фиг.4C показана блок-схема, иллюстрирующая последовательность операций для использования WADGPS-системы с локальной системой позиционирования и/или локальной RTK-системой.
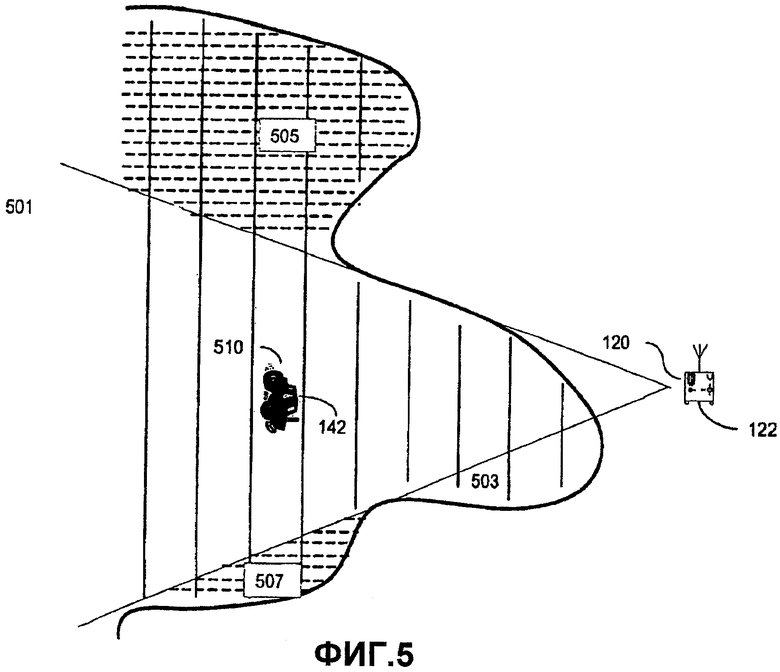
На фиг.5 показана диаграмма, иллюстрирующая ситуацию, в которой может применяться комбинированное действие.
Описание изобретения
На фиг.1 иллюстрируется широкомасштабная или глобальная дифференциальная GPS-система (WADGPS) 100 в соответствии с одним из вариантов осуществления данного изобретения. Как показано на фиг.1, WADGPS-система 100 включает в себя сеть опорных станций 120, каждая из которых имеет GPS-приемник 122, и один или более концентраторов 105 обработки. Опорные станции 120 непрерывно передают концентратору 105 исходные наблюдаемые величины GPS для обработки. Эти наблюдаемые величины включают в себя кодовое GPS-измерение и GPS-измерение фазы несущий, эфемериды и другую информацию, полученную в соответствии с сигналами, принятыми от множества спутников 110 опорными станциями 120. Опорные станции 120 располагаются на известных местах по широкой территории 101 (например, по континенту) в случае широкомасштабной DGPS-системы или по всему земному шару в случае глобальной DGPS-сети. Концентраторами 105 является оборудование, на котором обрабатываются наблюдаемые величины GPS и вычисляются DGPS-коррекции. Если предусмотрено множество независимых концентраторов, предпочтительно чтобы они географически разделялись и действовали параллельно.
WADGPS-система 100 может использоваться одним или более пользователями (или пользовательскими устройствами или объектами) 140, каждый из которых имеет пользовательский GPS-приемник 142 для целей позиционирования и/или навигации. В одном из вариантов осуществления данного изобретения пользователь 140 связывается с ближайшей опорной станцией 120 через канал радиосвязи RTK, чтобы пользовательский приемник 142 и ближайшая опорная станция 120 сформировали локальную RTK-систему 150. В некоторых вариантах осуществления пользователь 140 может связываться также с локальной системой позиционирования 174, в которую входят один или более ориентиров 176. Один или более ориентиров 176 могут быть активными или пассивными. Каждый из этих ориентиров 176 может иметь GPS-приемник 122.
Система 100 дополнительно включает в себя стандартные каналы передачи данных (не показаны), обеспечивающие надежные механизмы переноса для наблюдаемых величин GPS, посылаемых от опорных станций 120 концентраторам 105, и трансляции вычисленных коррекций от концентраторов 105 опорным станциям 120 и пользователям 140. Стандартная WADGPS-система обычно имеет от 3 до 10 опорных приемников, а глобальная WADGPS-система обычно имеет от 20 до 100 опорных приемников, снабжающих данными концентраторы 105. В одном из вариантов осуществления данного изобретения наблюдаемые величины GPS посылаются от опорных станций 120 к концентраторам 105 через Интернет, и также через Интернет посылаются вычисленные коррекции от концентраторов к одной или более станциям (не показано), откуда они передаются на один или более спутников (не показано), которые затем транслируют вычисленные коррекции с возможностью их получения опорными станциями 120 и пользовательским приемником 142.
В одном из вариантов осуществления данного изобретения пользователь или объект 140 также оборудованы компьютерной системой 144, связанной с пользовательским GPS-приемником 142. Как показано на фиг.2, компьютерная система 144 включает в себя центральный процессор (ЦП) 146, память 148, один или более портов 154 ввода, один или более вспомогательных приемников 155, один или более портов 156 вывода и (опционально) пользовательский интерфейс 158, связанные друг с другом одной или более шинами 152 связи. Память 148 может включать в себя скоростное оперативное запоминающее устройство и энергонезависимое массовое запоминающее устройство (такое как одно или более запоминающих устройств на магнитных дисках или устройств флеш-памяти).
Предпочтительно, чтобы память 148 хранила операционную систему 162, процедуры 164 GPS-приложения и базу данных 170. Процедуры 164 GPS-приложения могут включать в себя процедуры 166 для осуществления способа 300 комбинированного использования локальной системы 174 позиционирования, локальной RTK-системы 150 и/или WADGPS-системы 100, как более подробно описано ниже. Операционная система 162 и программы и процедуры 164 приложения, хранящиеся в памяти 148, предназначены для выполнения центральным процессором 146 компьютерной системы 144. Предпочтительно, чтобы память 148 хранила также структуры данных, используемые во время выполнения процедур 164 GPS-приложения, включающие в себя GPS-измерения 168 псевдодальности и фазы несущей, GPS-коррекции 172, принятые от концентраторов, а также прочие структуры данных, рассмотренные в данном документе.
Порты ввода 154 предназначены для приема данных от GPS-приемника 142 и, по меньшей мере, от одного вспомогательного приемника 155, для приема информации от опорной станции или ориентира 120 в локальной системе 174 позиционирования или локальной RTK-системе 150 через канал радиосвязи 124 и для приема GPS-коррекций и другой информации от концентраторов 105 через спутниковый канал 107. Порт 156 вывода используется для вывода данных опорной станции или ориентиру 120 через канал радиосвязи 124 или акустическое или лазерное устройство (не показано). В одном из вариантов осуществления данного изобретения ЦП 146 и память 148 компьютерной системы 144 объединены с GPS-приемником 142 в единое устройство внутри единого корпуса, как показано на фиг.2. Однако такое объединение не является необходимым для осуществления способов данного изобретения.
Следовательно, пользователь или объект 140 может участвовать в трех разных режимах операции либо одновременно, либо в разное время. Пользователь или объект 140 могут действовать в WADGPS-режиме, в котором пользователь или объект 140 позиционируются или осуществляют навигацию посредством WADGPS-системы 100, в RTK-режиме, в котором пользователь или объект 140 позиционируются или осуществляют навигацию посредством локальной RTK-системы 150, и/или в режиме локального позиционирования, в котором пользователь или объект 140 позиционируются или осуществляют навигацию посредством локальной системы 174 позиционирования. Когда пользователь или объект 140 близки к одному или более ориентирам 176, с которыми они могут связываться, и может поддерживаться канал связи между пользователем или объектом 140 и одним или более ориентирами 176, пользователь может использовать один или более ориентиров 176 для позиционирования относительно одного или более ориентиров 176. Когда пользователь или объект 140 близки к опорной станции 120, с которой они связываются, и может поддерживаться канал радиосвязи между пользователем или объектом 140 и опорной станцией 120, пользователь может использовать локальную RTK-систему 150 для позиционирования относительно опорной станции 120. Локальная система 174 позиционирования и локальная RTK-система 150 более выгодны, чем WADGPS-система 100, тем, что они более точные, и что полноцикловая целочисленная неоднозначность может быть быстро разрешена, как поясняется далее.
При применении локальной RTK-системы 150, когда измерения берутся относительно n спутников 110 из зоны видимости опорного GPS-приемника 122 и связанного пользовательского GPS-приемника 142, измерения могут быть использованы для нахождения местоположения пользователя или объекта 140 в соответствии со следующим уравнением в матричной форме:

 (1),
(1),
где  - вектор измерения фазы несущей, сформированный дифференциальным измерением фазы несущей относительно каждого из n спутников 110; N=[N
1
N
2
… N
n
]
T - вектор целочисленной неоднозначности, сформированный дифференциальной целочисленной неоднозначностью, связанной с каждым из дифференциальных измерений фазы несущей в векторе измерения фазы несущей; H=[h
1
h
2
… h
n
]
T - матрица чувствительности измерений, сформированная блоком векторов от пользователя или объекта 140 к n спутникам 110; x - вещественный вектор неизвестного состояния (или вещественный вектор), включающий в себя радиус-вектор от опорной станции 120 к пользователю или объекту 140 в локальной RTK-системе 150; а n
φ
=[n
φ1
n
φ2
… n
φn
]
T - вектор измерения шума (или вектор невязок фазовой дальности), сформированный дифференциальным шумом фазы несущей относительно каждого из n спутников 110.
- вектор измерения фазы несущей, сформированный дифференциальным измерением фазы несущей относительно каждого из n спутников 110; N=[N
1
N
2
… N
n
]
T - вектор целочисленной неоднозначности, сформированный дифференциальной целочисленной неоднозначностью, связанной с каждым из дифференциальных измерений фазы несущей в векторе измерения фазы несущей; H=[h
1
h
2
… h
n
]
T - матрица чувствительности измерений, сформированная блоком векторов от пользователя или объекта 140 к n спутникам 110; x - вещественный вектор неизвестного состояния (или вещественный вектор), включающий в себя радиус-вектор от опорной станции 120 к пользователю или объекту 140 в локальной RTK-системе 150; а n
φ
=[n
φ1
n
φ2
… n
φn
]
T - вектор измерения шума (или вектор невязок фазовой дальности), сформированный дифференциальным шумом фазы несущей относительно каждого из n спутников 110.
Для нахождения вещественного вектора x через уравнение (1) необходимо разрешить вектор целочисленной неоднозначности Ν. Для разрешения значений целочисленной неоднозначности, включенных в вектор целочисленной неоднозначности Ν, разработано множество различных способов, и эти способы типично используют процесс поиска для нахождения комбинации значений целочисленной неоднозначности, которые удовлетворяют определенным критериям, например минимуму нормы вектора невязок измерений Δ Φ,

 (2),
(2),
где Δ
Φ - вектор невязок фазовой дальности, соответствующий проверяемому вектору целочисленной неоднозначности Ñ, включающему в себя комбинацию значений целочисленной неоднозначности; а  - решение уравнения (1) по методу наименьших квадратов,
- решение уравнения (1) по методу наименьших квадратов,
 (3),
(3),
или

 (4),
(4),
где
 (5)
(5)
является ковариационной матрицей измерений, сформированной из σ 1, то есть среднеквадратичного отклонения дифференциального шума фазы несущей n φ1, рассчитанного стандартными способами. Пример способа для вычисления σ 1 можно найти в публикациях «Precision, Cross Correlation, and Time Correlation of GPS Phase and Code Observations», by Peter Bona, GPS Solutions, Vol.4, No.2, Fall 2000 г., p.3-13, или в «Tightly Integrated Attitude Determination Methods for Low-Cost Inertial Navigation: Two-Antenna GPS and GPS/Magnetometer», by Yang, Y., Ph.D. Dissertation, Dept. of Electrical Engineering, University of California, Riverside, CA июнь 2001 г., обе из которых включены в настоящий документ посредством ссылки.
Другие примеры метода поиска можно найти в «Instantaneous Ambiguity Resolution», by Hatch, R., in the Proceedings of the KIS Symposium 1990 г., Banff, Canada, включенном в настоящий документ посредством ссылки, или в заявке на патент того же заявителя «Fast Ambiguity Resolution for Real Time Kinematic Survey and Navigation», заявка № 10/338264, по которой выдан патент США № 6753810, которые включены в настоящий документ посредством ссылки.
С разрешением целочисленной неоднозначности местоположение, скорость и время (PVT) пользовательского приемника 142 могут быть в точности вычислены как решения локальной RTK-системы 150.
При применении локальной системы 174 позиционирования местоположение, скорость и время (PVT) пользовательского приемника 142 могут быть точно вычислены как решения локальной системы 174 позиционирования. К примеру, информация о дальности и угле относительно одного или более ориентиров может быть определена при помощи времени полета сигнала и/или доплеровского сдвига частоты. Дополнительное обсуждение определения информации о дальности и угле в локальной системе позиционирования приведено в публикации заявки US № 2005-0270228 «Improved Radar System for Local Positioning», поданной 11 апреля 2005 г., содержание которой включено в настоящий документ посредством ссылки. В дополнение, измерения, выполненные относительно n спутников 110 в поле зрения GPS-приемника 120 в одном или более из одного или более ориентиров 176 и связанного пользовательского GPS-приемника 142, могут быть использованы для нахождения местоположения пользователя или объекта 140 в соответствии с приведенными выше уравнениями.
Несмотря на многие преимущества локальная система 174 позиционирования и/или локальная RTK-система 150 в любой момент могут оказаться недоступными для пользователя или объекта 140, поскольку пользователь может переместиться в место, слишком далекое от одного или более ориентиров 176 и/или опорной станции 120, или выйти из зоны видимости одного или более ориентиров 176 и/или опорной станции 120, отчего канал связи и/или канал радиосвязи 124 между пользователем или объектом 140 и ориентиром и/или опорной станцией не сможет поддерживаться. В этих ситуациях ионосферная ошибка не может быть удовлетворительным образом устранена путем учета разницы измерений у пользователя или объекта 140 и измерений у ориентира 176 и/или опорной станции 120. Эта ошибка влияет на вышеописанный процесс поиска для вектора целочисленной неоднозначности, поскольку она вызывает возрастание невязок измерений, включенных в вектор невязок измерений Δ Ф.
Следовательно, в ситуациях, где локальная система 174 позиционирования и локальная RTK-система 150 недоступны или теряют точность ввиду большого разноса между пользовательским GPS-приемником и ориентиром и опорной станцией, у пользователя может появиться необходимость действовать в WADGPS-режиме, в котором применяется другой подход к разрешению целочисленной неоднозначности. При применении WADGPS-системы 100 каждая полноцикловая неоднозначность оценивается как вещественнозначная (нецелая) переменная. Этот прием часто называют определением значения «плавающей неоднозначности». Один из способов определения значения «плавающей неоднозначности» связан с формированием скорректированных по рефракции кодовых измерений и измерений фазы несущей на основе исходных (необработанных) GPS-измерений, выполненных у пользователя или объекта 140, масштабированием измерений фазы несущей к тем же единицам, что и кодовые измерения, и вычитанием каждого масштабированного измерения фазы несущей из соответствующего кодового измерения для получения величины смещения. В одном из вариантов осуществления данного изобретения скорректированное по рефракции кодовое измерение, обозначенное как P RC, формируется следующим образом:
 (6),
(6),
где P 1 и P 2 - исходные кодовые измерения псевдодальности на частотах L1 и L2, равных f 1 и f 2 , соответственно, в конкретном периоде измерения. Скорректированное по рефракции измерение фазы несущей, обозначенное как L RC , аналогично формируется следующим образом:
 (7),
(7),
где L 1 и L 2 - измерения фазы несущей, масштабированные по длине волны сигналов L1 и L2 соответственно, каждое из которых включает в себя приближенное значение полноцикловой неоднозначности, которое добавлено, чтобы приблизить масштабированное измерение фазы несущей к тому же значению, что и соответствующее кодовое измерение. Таким образом,
 (8),
(8),
 (9),
(9),
где φ 1 и φ 2 - исходные измерения фазы несущей на частотах L1 и L2 соответственно в один и тот же период измерения, а полноцикловые значения N 1 и N 2 инициализированы в начале слежения за фазой несущей пользователем или объектом 140 для получения значений, находящихся внутри одной длины волны несущей соответствующего кодового измерения, для того чтобы разницы между масштабированными измерениями фазы несущей и соответствующими кодовыми измерениями оставались небольшими. Из формы уравнения (7) следует заметить, что скорректированное по рефракции измерение фазы несущей включает в себя полноцикловую неоднозначность с длиной волны λ, определенной через сумму f 1 и f 2 (то есть около 2,803 ГГц) так, что λ равна приблизительно 0,1070 метра (т.е. c/(f 1+f 2)).
Поскольку ионосферные эффекты в соответствии с уравнениями (6)-(9) устранены как из кодовых измерений, так и из измерений фазы несущей, а влияние ошибок часов и орбиты спутника на псевдодальность и измерения фазы несущей одинаковы, величины P RC и L RC, полученные на этапе 310, должны быть почти идентичными, если не учитывать возможную полноцикловую неоднозначность, связанную с измерением фазы несущей L RC, и интенсивный шум в виду многолучевого распределения в кодовом измерении P RC. Это делает возможным разрешение полноцикловой неоднозначности в L RC путем сглаживания смещения (O=P RC -L RC) между скорректированным по рефракции кодовым измерением и скорректированным по рефракции измерением фазы несущей для последовательности периодов измерений, вследствие чего возрастает точность смещения как оценки «плавающей неоднозначности». Величина сглаженного смещения может быть впоследствии отрегулирована при помощи постфиксных невязок измерений, что позволяет дополнительно отрегулировать измерения фазы несущей так, чтобы отрегулированные невязки измерений были близки к нулю.
В одном из вариантов осуществления данного изобретения смещение сглаживается путем получения обобщенного среднего для смещения следующим образом:
 (10)
(10)
где i=1,2,3,… - используется для обозначения периода измерения, а величина η - доверительная величина, возрастающая по мере того, как O i становится более точной оценкой значения плавающей неоднозначности. В одном из вариантов осуществления данного изобретения η равно i, пока не будет достигнуто максимальное значение усреднения. К примеру, если полагается, что измерение фазы несущей имеет лишь 0,01 шума кодового измерения, величина «η» будет ограничена сверху числом 100 в квадрате (или 10000). Таким образом, уравнение (9) может решаться рекурсивно, пока не будет достигнута предопределенная точность значения плавающей неоднозначности.
При сглаженном смещении O i сглаженное скорректированное по рефракции кодовое измерение S может быть получено путем прибавления скорректированного по рефракции измерения фазы несущей для текущего периода измерения к сглаженному смещению, то есть
 (11),
(11),
где достигается точность измерения фазы несущей, но отсутствует связанная с ним неоднозначность.
Вышеописанный процесс, описанный при помощи уравнений (6)-(11), выполняется для каждого спутника из множества спутников в зоне видимости пользовательского GPS-приемника 142. При доступности сглаженного скорректированного по рефракции кодового измерения для каждого спутника из множества спутников в зоне видимости пользовательского GPS-приемника 142 могут быть получены псевдодальности до этих спутников. Эти псевдодальности регулируются WADGPS-коррекциями, принятыми от концентраторов 105, и используются в фиксации по методу взвешенных наименьших квадратов для расчета вектора состояний x. Таким образом, местоположение, скорость и время (PVT) пользовательского GPS-приемника 142 могут быть вычислены как WADGPS-решения для PVT пользовательского GPS-приемника 142.
Другие примеры способов получения сглаженных, скорректированных по рефракции смещений можно найти в «The Synergism of Code and Carrier Measurements», by Hatch, R. in the Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning, DMA, NOS, Las Cruces, N.M., New Mexico State University, Vol. II, pp.1213-1232, включенном посредством ссылки, и в заявке на патент того же заявителя «Method for Generating Clock Cоrrections fоr a Wide-Area or Global Differential GPS System», публикация US № 2005-0024263, которая также включена посредством ссылки.
Также есть возможность найти значения «плавающей неоднозначности» как разделенные состояния в решениях методами наименьших квадратов или фильтра Калмана. Когда неоднозначности включаются как состояния, среднее значение для каждого значения плавающей неоднозначности регулируется в соответствии с дисперсией так, чтобы точность среднего значения возрастала с изменением геометрии системы ввиду движения спутника. Таким образом, в этом методе также возрастает достигаемая точность оценки по времени. См. Patrick H. C. Hwang's paper in Navigation Vol. 38, No. 1, Spring 1991 г., titled «Kinematic GPS for Differential Positioning: Resolving Integer Ambiguities on the Fly», включенную посредством ссылки.
Существует много комбинаций и вариаций вышеупомянутых методов, которые можно применять для оценки значений «плавающей неоднозначности». Однако все они связаны с обработкой данных по значительному промежутку времени. Этот промежуток времени часто может доходить до одного-двух часов, прежде чем можно будет с уверенностью сказать, что «плавающая неоднозначность» достаточно точна для достижения точности менее 10-ти сантиметров в местоположении навигации пользователя 140. Для сокращения промежутка времени на получение значений «плавающей неоднозначности» WADGPS-система может инициализироваться, как описано ниже, используя известное место пользовательского GPS-приемника 142.
На фиг.3A показан способ 300 инициализации WADGPS-системы 100. Как показано на фиг.3, способ 300 включает в себя этап 310, на котором определяется, стационарен ли пользователь в известном местоположении. Это может быть выполнено в соответствии с входными данными пользователя или через некий стандартный механизм, который позволяет компьютеру 144 определить, был ли пользовательский приемник 142 стационарен. Если местоположение пользовательского приемника 142 известно точно, с помощью этого местоположения можно вычислить значения плавающей неоднозначности без привлечения локальной системы 174 позиционирования и/или локальной RTK-системы 150, как более подробно разъясняется ниже. В качестве известного местоположения могло бы использоваться разведанное местоположение пользовательского GPS-приемника 142, или, в некоторых вариантах осуществления, местоположение может быть известным просто потому, что местоположение пользователя или объекта 140 оставалось стационарным и местоположение пользователя уже было определено в течение более ранней операции.
В случае определения, что пользователь стационарен в известном местоположении, способ 300 продолжается на этапе 320, на котором местоположение пользовательского приемника установлено в качестве известного места. В противном случае способ 300 продолжается на этапе 330, на котором локальная система 174 позиционирования и/или локальная RTK-система 150 имеют возможность автоматически обновлять местонахождение пользователя, используя описанный выше способ.
Способ 300 дополнительно включает в себя этап 340, в котором местонахождение пользовательского приемника, независимо от того, определен ли он на этапе 320 или же на этапе 330, используется для вычисления набора теоретических дальностей до спутников 110. Это может быть связано с вычислением местоположений спутников 110 на основе транслированных эфемерид от WADGPS-системы 100 и регулированием этих местоположений посредством орбитальных коррекций, транслируемых WADGPS-системой 100. Если известны одновременно и местоположение пользовательского приемника, и местоположения спутников в декартовых координатах, теоретическая дальность от пользователя 140 до каждого спутника 110 может быть вычислена следующим образом:
 (11),
(11),
где нижний индекс s обозначает координату спутника, а нижний индекс u обозначает координату пользовательского приемника или объекта.
Способ 300 дополнительно включает в себя этап 350, на котором исходное значение плавающей неоднозначности a, соответствующее каждому спутнику, рассчитывается путем вычитания дальности, полученной из скорректированного по рефракции измерения фазы несущей относительно того же спутника, из вычисленной теоретической дальности, то есть

 (12),
(12),
где L 0 RC представляет скорректированное по рефракции измерение фазы несущей, вычисленное в соответствии с уравнением (7) в начальном периоде измерения.
Способ 300 дополнительно включает в себя этап 360, в котором значения плавающей неоднозначности разрешаются путем прибавления исходных значений плавающей неоднозначности к соответствующему скорректированному по рефракции измерению фазы несущей в последующих периодах измерений, т.е.
 ,
,
и путем трактовки значений плавающей неоднозначности как хорошо известных, отчего доверительность устанавливается высокой (или дисперсия устанавливается низкой). На практике этап 360 выполняется путем использования малого значения коэффициента усиления для регулировки значений плавающей неоднозначности в процессе определения значений плавающей неоднозначности. К примеру, если значения плавающей неоднозначности определяются путем сглаживания отклонения между скорректированным по рефракции кодовым измерением и скорректированным по рефракции измерением фазы несущей в соответствии с уравнением (9), малый коэффициент усиления означает такую трактовку значения плавающей неоднозначности, как если бы в его вычислении использовалось большое число величин отклонения, то есть η=i + (большое число). Если значение неоднозначности определяется в процессе фильтра Калмана, малый коэффициент усиления достигается установлением дисперсии состояния неоднозначности на малое значение.
Таким образом, при использовании известного места стационарного пользовательского приемника 142 локальной системы 174 позиционирования и/или локальной RTK-системы 150 для инициализации значений плавающей неоднозначности можно избежать нормального времени «втягивания» от пятнадцати минут до двух часов, требуемого для нахождения значений плавающей неоднозначности, когда местоположение пользовательского приемника неизвестно. Это может весьма ускорить процесс разрешения неоднозначностей фазы несущей в WADGPS-системе 100, делая WADGPS-систему 100 более выгодной для осуществления целей позиционирования и/или навигации в реальном времени.
Чтобы применить локальную систему 174 позиционирования и/или локальную RTK-систему 150 для обновления местоположения пользовательского приемника в способе 300, местоположение одного или более ориентиров 176 в локальной системе 174 позиционирования и/или местоположение опорной станции 120 в локальной RTK-системе 150 может быть точно определено в WADGPS-системе 100. Стандартная локальная система позиционирования или локальная RTK-система могут быть использованы в относительном смысле, означающем, что местоположение пользовательского приемника 142 может быть определено относительно одного или более ориентиров и/или опорных приемников. Таким образом, точные относительные местоположения пользовательского GPS-приемника 142 могут быть получены, несмотря даже на то, что абсолютные координаты одного или более ориентиров и/или опорной станции могут как быть, так и не быть в высокой степени точными, и для определения положения ориентира и/или опорной станции используются координатные данные, отличные от нормальных GPS-данных. Однако для комбинированного использования локальной системы 174 позиционирования, RTK-системы 150 и/или WADGPS-системы 100 необходимо определить абсолютное местоположение одного или более ориентиров 176 в локальной системе 174 позиционирования и опорного приемника 120 в RTK-системе 150. Если для одного или более ориентиров 176 в локальной системе 174 позиционирования или опорной станции 120 в локальной RTK-системе 150 используется неверное местоположение, значение плавающей неоднозначности, вычисленное вышеописанным способом, будет неверным. Это приведет к медленному дрейфу вычисленного местоположения пользовательского приемника 142 с медленной регулировкой значений плавающей неоднозначности к верному значению во время последующей WADGPS-обработки.
В одном из вариантов осуществления данного изобретения среднее местоположение одного или более ориентиров 176 в локальной системе 174 позиционирования и/или среднее местоположение опорной станции 120 в RTK-системе 150 повышенной надежности может быть определено на основе часов данных позиционирования от WADGPS-системы 100. В альтернативном варианте осуществления компьютерная система в одном или более ориентиров 176 и/или на опорной станции 120 принимает входную величину оператора для ее местоположения и предоставляет местоположение пользователю 140. Это позволяет незамедлительно начать относительное локальное позиционирование и/или RTK-позиционирование с использованием этого опорного местонахождения. В то же время более точное местоположение одного или более ориентиров 176 и/или опорной станции 120 может быть определено WADGPS-системой 100 и передано одному или более ориентирам 176 и/или опорной станции 120. Это более точное местоположение или смещение между входной величиной оператора для местоположения и более точным местоположением одного или более ориентиров 176 и/или опорной станции 120, определенным WADGPS-системой 100, может быть затем передано на относительно медленной скорости пользователю 140.
На фиг.3B более подробно показан этап 330 способа 300, где местоположение пользователя обновляется при помощи локальной системы 174 позиционирования и/или локальной RTK-системы 150. Как показано на фиг.3B, этап 330 включает в себя подэтап 331, на котором пользователь или объект 140 принимают входную величину оператора для местоположения опорной станции 120 в локальной системе 174 позиционирования и/или RTK-системе 150, и подэтап 333, на котором пользователь или объект 140 выполняют локальное позиционирование и/или локальную RTK-операцию для определения собственного местоположения относительно одного или более ориентиров 176 и/или опорной станции 120. Этап 330 дополнительно включает в себя подэтап 335, на котором пользователь или объект 140 принимают более точное местоположение опорной станции 120, определенное WADGPS-системой 100, или смещение между входной величиной оператора для местоположения опорной станции 120 и более точным местоположением опорной станции 120, определенным WADGPS-системой 100. Этап 330 дополнительно включает в себя подэтап 337, на котором пользователь или объект 140 вычисляют абсолютное местоположение пользовательского GPS-приемника 142 в декартовых координатах, используя либо пользовательскую входную величину для местоположения ориентира и/или опорной станции, либо местоположение одного или более ориентиров 176 и/или опорной станции 120, определенные WADGPS-системой 100 (если доступно).
Примером, обеспечивающим получение выгод при использовании способа 300, является позиционирование поезда. Когда поезд проезжает через туннель, канал локальной системы позиционирования, RTK-канал и глобальный WADGPS-канал будут потеряны. В этой ситуации канал передачи данных локальной системы позиционирования и/или RTK-канал передачи данных могут быть настроены для инициализации WADGPS-значений плавающей неоднозначности при выходе поезда из туннеля. Это помогло бы избежать долгого интервала данных, требуемого в противном случае для определения точных значений плавающей неоднозначности.
Другим примером, где могут быть получены выгоды при использовании способа 300, является позиционирование самолета сразу после взлета. В этом случае локальная система позиционирования и/или локальная RTK-система в аэропорте, где самолет готовится взлететь, может быть использована для инициализации WADGPS-неоднозначностей либо перед взлетом, либо во время взлета.
Таким образом, пользователь или объект 140, включающие в себя пользовательский GPS-приемник 142 и компьютерную систему 144, связанную с пользовательским GPS-приемником 142, могут действовать как в режиме локального позиционирования, так и в RTK-режиме и/или WADGPS-режиме. Локальная система 174 позиционирования и локальная RTK-система 150 являются более удобными, чем WADGPS-система, поскольку для разрешения значений целочисленной неоднозначности процесс поиска локальной системы 174 позиционирования и локальной RTK-системы 150, как обсуждалось выше, занимает гораздо меньшее время, чем способ сглаживания в WADGPS-системе 100. В процессе поиска сглаживание кодовых измерений либо не требуется, либо выполняется сглаживание кодовых измерений гораздо меньшей продолжительности не для определения полноцикловой неоднозначности непосредственно, а для обеспечения сниженной неопределенности в исходном наборе значений целочисленной неоднозначности, чтобы последующий процесс поиска мог быть более сжатым. По этой причине для получения исходного набора значений неоднозначности достаточно всего нескольких секунд данных.
Однако локальная система 174 позиционирования и/или локальная RTK-система 150 оказываются единственными доступными в ситуациях, где может поддерживаться канал связи между пользовательским GPS-приемником 142 и одним или более ориентирами 176 в локальной системе 174 позиционирования и/или опорной станцией 120 в локальной RTK-системе 150, а пользователь или объект 140 не отходят слишком далеко от одного или более ориентиров 176 в локальной системе 174 позиционирования и/или опорной станции 120 в локальной RTK-системе 150. Когда эти условия не выполняются, то есть когда локальная система 174 позиционирования и/или локальная RTK-система 150 либо недоступны, либо неточны, пользователь может обратиться к WADGPS-системе 100 с целью навигации, используя последнее определенное локальной системой 174 позиционирования и/или RTK-системой 150 местоположение пользовательского приемника для инициализации WADGPS-системы, что позволяет избежать долгого времени «втягивания» для получения значений «плавающей неоднозначности».
На фиг.4A показана последовательность операций 400 для комбинированного действия локального позиционирования, RTK и WADGPS, выполняемого компьютерной системой 144 пользователя. Последовательность операций включает в себя этапы 440, 450 и 460. Как показано на фиг.4A, когда доступны коррекции локального позиционирования, пользователь 140 действует в режиме локального позиционирования, а когда доступны RTK-коррекции, пользователь 140 действует в RTK-режиме. Пользователь 140 принимает местоположение 401 ориентира/опорной станции 120 в локальной системе 174 позиционирования и/или локальной RTK-системе 150 и выполняет этап 440, в котором PVT пользовательского приемника определяются при помощи коррекций 410 локального позиционирования/RTK, принятых от ориентира 176 в локальной системе 174 позиционирования и/или от опорного приемника 120 в локальной RTK-системе 150. Во время выполнения этапа 440 пользователь 140 может продолжать принимать WADGPS-коррекции 420 от концентраторов 105, так что WADGPS-решения могут генерироваться в фоновом режиме. Пользователь 140 также может на относительно низкой скорости принимать от концентратора 105 обновленное местоположение 430 ориентира 176 в локальной системе 174 позиционирования и/или опорной станции 120 в локальной RTK-системе 150. При использовании обновленного местоположения ориентира 176 и/или опорной станции 120 и решений местоположения пользовательского приемника из локального позиционирования/RTK WADGPS-решения могут непрерывно инициализироваться в фоновом режиме для согласования с решениями из локального позиционирования/RTK в соответствии со способом 300, описанным выше.
Когда коррекции локального позиционирования и RTK теряются, пользователь 140 переключается в WADGPS-режим и выполняет этап 450, в котором пользователь 140 использует местоположение пользовательского приемника, определенное в режиме локального позиционирования и/или RTK непосредственно перед тем, как коррекции локального позиционирования/RTK стали недоступными, для инициализации значений плавающей неоднозначности, для действий в WADGPS-режиме в соответствии со способом 300, описанным выше. Таким образом, значения «плавающей неоднозначности» могут быть определены без долгого времени «втягивания». Во время выполнения этапа 450 пользователь 140 продолжает принимать WADGPS-коррекции 420 от концентраторов 105. Пользователь 140 также может на относительно низкой скорости принимать от концентратора 105 обновленное местоположение 430 одного или более ориентиров 176 в локальной системе 174 позиционирования и/или опорной станции 120 в локальной RTK-системе 150. Координаты опорной станции используются для преобразования местоположения пользовательского приемника, сгенерированного в WADGPS-режиме, в местоположение относительно одного или более ориентиров 176 и/или локального опорного приемника 120. Таким образом, PVT-результаты, сгенерированные компьютерной системой пользователя 144, будут плавно переходить от одного режима к другому.
Когда коррекции локального позиционирования и/или RTK снова доступны, пользователь возобновляет действие локального позиционирования и/или RTK на этапе 460, которое сходно с действием локального позиционирования и/или RTK на этапе 440.
На фиг.4B показана блок-схема, иллюстрирующая последовательность операций 470 для применения локальной системы позиционирования, локальной RTK-системы и/или WADGPS-системы. Если доступно, местоположение пользователя может быть определено в соответствии с информацией, принятой от локальной системы позиционирования (480). Если доступно, местоположение пользователя может быть определено в соответствии с информацией, принятой от RTK-системы (482). Если доступно, местоположение пользователя может быть определено в соответствии с информацией, принятой от WADGPS-системы (484). Может инициализироваться значение плавающей неоднозначности в измерении фазы несущей (486). Способ 470 может включать в себя меньше или больше операций. Две или более операции могут объединяться, и может изменяться позиция, по меньшей мере, одной операции.
В то время как навигация на основе корректирующих сигналов, принятых от системы локального позиционирования или локального RTK (например, от локальной опорной станции), является типично более точной, чем навигация на основе информации, принятой от WADGPS-системы, многолучевые сигналы могут неблагоприятно сказываться на точности корректирующей информации, производимой и передаваемой опорной станцией в системе локального позиционирования или локального RTK. Следовательно, если корректирующая информация, производимая опорной станцией локального позиционирования или локального RTK, оказалась искаженной (многолучевыми сигналами или иначе) более чем на пороговую величину, желательно обнаружить это условие и начать навигацию объекта или пользователя на основе информации от WADGPS-системы. Процесс, описанный ниже со ссылками на фиг.4C, увеличивает надежность многорежимной навигационной системы, обнаруживая неточность в сигналах коррекции, принятых от опорной станции локального позиционирования или локального RTK. Когда обнаружено это условие, навигация объекта или пользователя начинает опираться на информацию, принятую от WADGPS-системы. Если затем точность сигналов коррекции, принятых от опорной станции локального позиционирования или локального RTK, улучшается, процесс может перейти к навигации на основе корректирующей информации, принятой от системы локального позиционирования или локального RTK.
На фиг.4C показана блок-схема, иллюстрирующая последовательность операций 490 для повышения надежности информации о местоположении при переходе от WADGPS-системы к системе локального позиционирования/локального RTK. Если доступно, местоположение (иногда называемое WADGPS-местоположением) объекта или пользователя может быть определено в соответствии с информацией, принятой от WADGPS-системы (492). Навигация объекта или пользователя посредством WADGPS-системы может продолжаться, пока не установится (или не восстановится) связь с опорной станцией системы локального позиционирования или локального RTK. Если доступно, корректирующая информация пользователя о местоположении может быть принята от системы локального позиционирования/локального RTK (494), и местоположение (иногда называемое RTK-местоположением) объекта или пользователя может быть определено в соответствии с информацией, принятой от системы локального позиционирования/локального RTK (496). Если доступны текущие значения обоих местоположений (одного и того же объекта или пользователя), местоположение объекта или пользователя, определенное при помощи информации от WADGPS-системы, и местоположение объекта или пользователя, определенное при помощи информации от системы локального позиционирования/локального RTK, сравниваются (497). Если разница местоположения объекта или пользователя, определенного на основе информации от WADGPS-системы, и местоположения, определенного на основе информации от системы локального позиционирования/локального RTK, больше предопределенного порога, для навигации используется местоположение пользователя, определенное WADGPS-системой (498). Если разница местоположения объекта или пользователя, определенного на основе информации от WADGPS-системы, и местоположения объекта или пользователя, определенного при помощи информации от системы локального позиционирования/локального RTK, меньше предопределенного порога, для навигации используется местоположение объекта или пользователя на основе информации от системы локального позиционирования/локального RTK (499).
В некоторых вариантах осуществления предопределенный порог является одной или более фиксированными величинами. К примеру, в одном из вариантов осуществления предопределенным порогом является первая величина (например, 20 см) для разницы в вертикальном местоположении и вторая величина (например, 15 см) для разницы в горизонтальном местоположении. Если разница местоположений от WADGPS и от локального RTK в вертикальном измерении больше первой величины или их разница в горизонтальном измерении больше второй величины, корректирующая информация о местоположении от системы локального позиционирования/RTK отвергается, а для навигации используется WADGPS-местоположение. В некоторых прочих вариантах осуществления предопределенный порог определяется посредством сравнительного критерия хи-квадрат ковариационных матриц первого и второго местоположений (WADGPS-местоположения и местоположения локального RTK) объекта. Использование сравнительного критерия хи-квадрат ковариационных матриц обсуждается в Satirapod C., Wang J. и Rizos C., «A Simplified MINQUE Procedure for the Estimation of Variance-Cоvariance Components of GPS Observables», Survey Review, vоl. 36, no. 286, pp. 582-590, 2002 г.; H. K. Lee, C. Rizos и G. I. Jee «Design and Analysis of DGPS Filter with Consistent Error Covariance Information», SatNav 2003 г., 6th International Symposium on Satellitе Navigation Technology Including Mobile Positioning & Location Services, Melbourne, Australia, 22 июля 2003 г.; и Н. K Lee, C. Rizos и G. I. Jee «Design of Kinematic DGPS Filters with Consistent Error Covariance Information», Radar, Sonar and Navigation, IEEE Proceedings, Vol. 151, Issue 6, pp. 382-388, 10 декабря 2004 г., указанных посредством ссылки в качестве информации по уровню техники.
В одном из примеров осуществления пользовательский GPS-приемник 142 может действовать в первом режиме, который применяет локальную систему позиционирования 174 для определения первого местоположения пользователя 140, когда доступна связь с локальной системой позиционирования 174. Второе местоположение пользователя 140 может быть определено в соответствии с измерениями фазы несущей, выполняемыми посредством WADGPS-системы 100 во втором режиме операции. Известное местоположение пользователя 140 (например, первое местоположение) может быть использовано для инициализации значения плавающей неоднозначности в измерениях фазы несущей. В некоторых вариантах осуществления известное местоположение пользователя 140 может быть предоставлено и/или введено пользователем.
В некоторых вариантах осуществления первый режим используется для определения местоположения пользователя 140, если оно доступно. Однако если связь с локальной системой позиционирования 174 теряется, может быть использован второй режим. Связь с локальной системой 174 позиционирования может быть потеряна, если расстояние до локальной системы 174 позиционирования превосходит такие величины, как 100 м, 500 м, 1000 м, 10000 м или больше.
В некоторых вариантах осуществления первый режим и второй режим могут выполняться совместно, а разница между первым местоположением и вторым местоположением используется для инициализации значения плавающей неоднозначности в измерениях фазы несущей. В некоторых вариантах осуществления первый режим и второй режим могут выполняться совместно, а разница между первым местоположением и вторым местоположением используется для определения третьего местоположения пользователя 140. Третье местоположение пользователя может соответствовать информации, принятой от локального опорного приемника 122 в RTK-системе 150 в третьем режиме операции.
В некоторых вариантах осуществления третий режим может применяться, когда теряется связь с локальной системой 174 позиционирования, а первый режим может применяться, когда связь с локальной системой 174 позиционирования снова доступна.
В некоторых вариантах осуществления второй режим применяется, когда теряется связь с локальным опорным приемником 122 и локальной системой 174 позиционирования, а первый режим применяется, когда связь с локальной системой позиционирования 174 доступна, и при этом третий режим применяется, когда связь с локальным опорным приемником 122 доступна, а связь с локальной системой позиционирования 174 потеряна.
В некоторых вариантах осуществления второй режим применяется, если расстояние от локальной системы 174 позиционирования до пользователя 140 больше первой величины (например, 10000 м), первый режим применяется, если расстояние от локальной системы 174 позиционирования до пользователя 140 меньше второй величины (например, 1000 м), а третий режим применяется, если расстояние от локальной системы 174 позиционирования до пользователя 140 оказывается между первой предопределенной величиной и второй предопределенной величиной.
В некоторых вариантах осуществления второй режим применяется, когда местоположение, определенное вторым режимом, и местоположение, определенное первым режимом, сравниваются, и разница местоположения, определенного вторым режимом, и местоположения, определенного первым режимом, больше предопределенного порога.
В некоторых вариантах осуществления второй режим применяется, когда местоположение, определенное вторым режимом, и местоположение, определенное третьим режимом, сравниваются, и разница местоположения, определенного вторым режимом, и местоположения, определенного третьим режимом, больше предопределенного порога.
Процесс 400 может применяться во многих приложениях. Одно приложение связано с расширением действия локальной системы позиционирования и/или RTK на зоны, где канал связи с локальной системой позиционирования и/или канал радиосвязи RTK не может обслуживаться, но где канал связи WADGPS является, по меньшей мере, в большинстве случаев доступным. К примеру, как показано на фиг.5, пользователь или объект 140 может являться сельскохозяйственным транспортным средством 510, перемещающимся между рядами 520 в холмистой зоне 501, с пользовательским приемником 142, закрепленным на сельскохозяйственном транспортном средстве или на сельскохозяйственном оборудовании, связанном с сельскохозяйственным транспортным средством. Зона 501 включает в себя зону 503, видимую от опорной станции 120 в локальной RTK-системе 150, и зоны 505 и 507 (заштрихованные), которые не видны от опорной станции 120. Поскольку канал связи RTK обычно является линией прямой видимости, RTK-данные терялись бы при любом перемещении пользовательского GPS-приемника 142 из зоны 503 в зону 505 или 507. Но канал передачи данных между пользовательским приемником 142 и WADGPS-системой 100, как правило, доступен, поскольку часто поддерживается спутниками. При инициализации плавающих неоднозначностей в WADGPS-системе 100 в каждый момент, когда канал радиосвязи RTK доступен и RTK-система 150 в действии, точность RTK-операции может быть в практическом смысле сохранена во время тех интервалов, когда RTK-канал теряется.
Хотя в описании выше применялась WADGPS-система 100 по фиг.1, понятно, что в описанных выше способе 300 и процессе 400 также может являться выгодной любая региональная, широкомасштабная или глобальная система, в которой используются измерения фазы несущей от спутников в целях позиционирования и/или навигации, и которая, таким образом, требует определения значений неоднозначности, связанных с фазовыми измерениями. Примеры таких систем включают в себя систему Starfire™, разработанную в John Deere Company, и региональную Высокоточную Национальную Дифференциальную (HA-ND) GPS-систему, разрабатываемую несколькими правительственными организациями США.
Изобретение относится к области радиотехники, а именно данное изобретение включает в себя способ для комбинированного применения локальной системы позиционирования RTK и региональной, широкомасштабной или глобальной дифференциальной системы позиционирования (WADGPS) по фазе несущей, и может быть использовано для позиционирования и навигации объектов. Технический результат заключается в повышении точности навигации и позиционирования в реальном времени. Для этого определяют первое местоположение объекта на основе информации от WADGPS и определяют второе местоположение объекта на основе информации о местоположении от локальной системы позиционирования/RTK-системы позиционирования; местоположение, определенное WADGPS, и местоположение, определенное локальной системой позиционирования/RTK-системой позиционирования, сравнивают. WADGPS-местоположение применяется для осуществления навигации объекта, когда разница WADGPS-местоположения и местоположения локального позиционирования/RTK больше предопределенного порога, а местоположение локального позиционирования/RTK применяется для осуществления навигации объекта, когда разница WADGPS-местоположения и местоположения локального позиционирования/RTK меньше предопределенного порога. 4 н. и 18 з.п. ф-лы, 7 ил.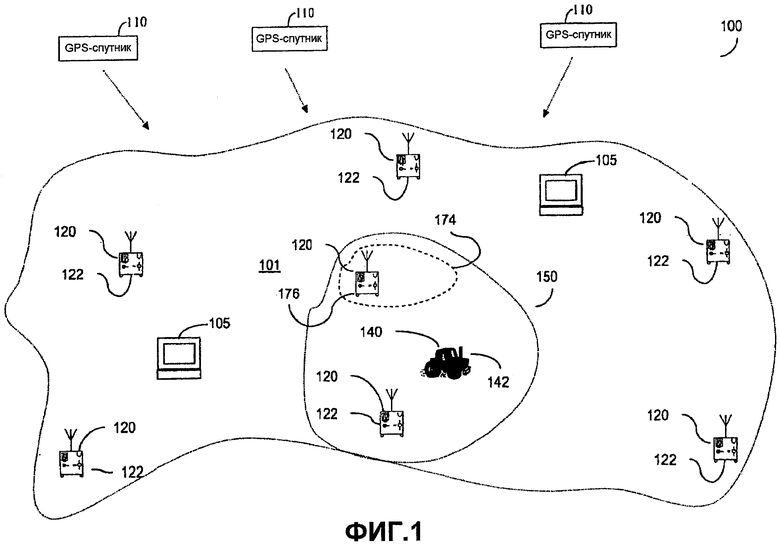
1. Способ для позиционирования или навигации объекта посредством как широкомасштабной дифференциальной спутниковой системы позиционирования, так и локальной системы позиционирования, причем способ содержит:
определение первого местоположения объекта на основе корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования;
прием корректирующей информации о местоположении от базовой станции локальной системы позиционирования и определение второго местоположения объекта на основе корректирующей информации, принятой от базовой станции локальной системы позиционирования;
сравнение первого местоположения и второго местоположения; и
использование первого местоположения для навигации объекта, когда разница первого местоположения и второго местоположения больше предопределенного порога, и использование второго местоположения для навигации объекта, когда разница первого местоположения и второго местоположения меньше предопределенного порога.
2. Способ по п.1, в котором предопределенный порог определяется посредством сравнительного критерия хи-квадрат ковариационных матриц первого и второго местоположения объекта.
3. Способ по п.1, в котором предопределенный порог является величиной между 15 и 20 см относительно предопределенного направления.
4. Способ по п.1, в котором локальная система позиционирования является локальной кинематической в реальном времени (RTK) системой позиционирования.
5. Способ по п.1, включающий в себя переход от навигации объекта посредством локальной системы позиционирования к навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования в случае обнаружения потери связи с базовой станцией локальной системы позиционирования.
6. Способ по п.5, включающий в себя переход от навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования к навигации объекта посредством локальной системы позиционирования в случае обнаружения восстановления связи с базовой станцией локальной системы позиционирования и определения, что разница первого местоположения и второго местоположения меньше предопределенного порога.
7. Способ по п.1, в котором определение первого местоположения включает в себя прием корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования.
8. Машиночитаемый носитель записи с сохраненными на нем машиночитаемыми программными командами, которые при исполнении процессором вынуждают процессор выполнять способ для позиционирования или навигации объекта посредством как широкомасштабной дифференциальной спутниковой системы позиционирования, так и локальной системы позиционирования, причем программные команды содержат:
команды для определения первого местоположения объекта на основе корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования;
команды для приема корректирующей информации о местоположении от базовой станции локальной системы позиционирования и определения второго местоположения объекта на основе корректирующей информации, принятой от базовой станции локальной системы позиционирования;
команды для сравнения первого местоположения и второго местоположения; и
команды для использования первого местоположения для навигации объекта, когда разница первого местоположения и второго местоположения больше предопределенного порога, и для использования второго местоположения для навигации объекта, когда разница первого местоположения и второго местоположения меньше предопределенного порога.
9. Машиночитаемый носитель записи по п.8, причем предопределенный порог определяется посредством сравнительного критерия хи-квадрат ковариационных матриц первого и второго местоположения объекта.
10. Машиночитаемый носитель записи по п.8, причем предопределенный порог является величиной между 15 и 20 см относительно предопределенного направления.
11. Машиночитаемый носитель записи по п.8, причем локальная система позиционирования является локальной кинематической в реальном времени (RTK) системой позиционирования.
12. Машиночитаемый носитель записи по п.8, в котором программные команды дополнительно содержат команды для перехода от навигации объекта посредством локальной системы позиционирования к навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования в случае обнаружения потери связи с базовой станцией локальной системы позиционирования.
13. Машиночитаемый носитель записи по п.12, в котором программные команды дополнительно содержат команды для перехода от навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования к навигации объекта посредством локальной системы позиционирования в случае обнаружения восстановления связи с базовой станцией локальной системы позиционирования и определения, что разница первого местоположения и второго местоположения меньше предопределенного порога.
14. Машиночитаемый носитель записи по п.8, включающий в себя команды для приема корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования.
15. Спутниковый навигационный приемник для позиционирования или навигации объекта посредством как широкомасштабной дифференциальной спутниковой системы позиционирования, так и локальной системы позиционирования, содержащий:
память;
приемник спутникового сигнала;
по меньшей мере, один вспомогательный приемник для приема корректирующей информации о местоположении от широкомасштабной дифференциальной спутниковой системы позиционирования и локальной системы позиционирования;
процессор; и
по меньшей мере, одну программу, сохраненную в памяти и исполняемую процессором, причем программа включает в себя:
команды для определения первого местоположения объекта на основе корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования;
команды для приема корректирующей информации о местоположении от базовой станции локальной системы позиционирования и определения второго местоположения объекта на основе корректирующей информации, принятой от базовой станции локальной системы позиционирования;
команды для сравнения первого местоположения и второго местоположения; и
команды для использования первого местоположения для навигации объекта, когда разница первого местоположения и второго местоположения больше предопределенного порога, и для использования второго местоположения для навигации объекта, когда разница первого местоположения и второго местоположения меньше предопределенного порога.
16. Спутниковый приемник по п.15, в котором предопределенный порог определяется посредством сравнительного критерия хи-квадрат ковариационных матриц первого и второго местоположения объекта.
17. Спутниковый приемник по п.15, в котором предопределенный порог является величиной между 15 и 20 см относительно предопределенного направления.
18. Спутниковый приемник по п.15, в котором локальная система позиционирования является локальной кинематической в реальном времени (RTK) системой позиционирования.
19. Спутниковый приемник по п.15, в котором приемник переходит от навигации объекта посредством локальной системы позиционирования к навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования в случае обнаружения потери связи с базовой станцией локальной системы позиционирования.
20. Спутниковый приемник по п.19, в котором приемник переходит от навигации объекта посредством широкомасштабной дифференциальной спутниковой системы позиционирования к навигации объекта посредством локальной системы позиционирования в случае обнаружения восстановления связи с базовой станцией локальной системы позиционирования и определения, что разница первого местоположения и второго местоположения меньше предопределенного порога.
21. Спутниковый приемник по п.15, включающий в себя команды для приема корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования.
22. Спутниковый навигационный приемник для позиционирования или навигации объекта посредством как широкомасштабной дифференциальной спутниковой системы позиционирования, так и локальной системы позиционирования, причем спутниковый навигационный приемник:
определяет первое местоположение объекта на основе корректирующей информации от широкомасштабной дифференциальной спутниковой системы позиционирования;
принимает корректирующую информацию о местоположении от базовой станции локальной системы позиционирования и определяет второе местоположение объекта на основе корректирующей информации, принятой от базовой станции локальной системы позиционирования;
сравнивает первое местоположение и второе местоположение; и использует первое местоположение для навигации объекта, когда разница первого местоположения и второго местоположения больше предопределенного порога, и
использует второе местоположение для навигации объекта, когда разница первого местоположения и второго местоположения меньше предопределенного порога.
| US 20050151683 A1, 14.07.2005 | |||
| US 20030011511 A1, 16.01.2003 | |||
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| US 6531981 B1, 11.03.2003 | |||
| US 5995040 A, 30.11.1999. | |||

