Изобретение относится к системам автоматического управления полетом высокоманевренного самолета, в частности к системам, обеспечивающим требуемые характеристики продольной устойчивости и управляемости при пилотировании самолета на предельных углах атаки и перегрузках.
Известны системы автоматического управления полетом самолета, при которых требования продольной устойчивости и управляемости самолета обеспечиваются благодаря использованию статических автоматов продольного управления (АПУ). Известные системы описаны, например, в книгах: Михалев И.К. и др. Системы автоматического управления самолетом. Методы анализа и расчета. М., Машиностроение, 1971, с.142, 146-150. / Под ред. С.М. Федорова. Автоматизированное управление самолетами и вертолетами. М., Транспорт, 1977, с.76-77; Оболенский Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007, с.248-260.
К недостаткам известных систем автоматического управления, предусматривающих использование АПУ, следует отнести тот факт, что, применительно к высокоманевренному самолету, в частности типа МИГ-29КУБ, при управлении на предельных углах атаки и перегрузках перерегулирование в системе по углу атаки и по нормальной перегрузке существенно превышает допустимые значения. Как показали результаты моделирования, в системе невозможно обеспечить требуемые характеристики во всем диапазоне изменения центровок и весов самолета.
Наиболее близкой по технической сущности к заявляемой является система автоматического управления полетом высокоманевренного самолета, предусматривающая использование статического АПУ с ограничителем предельных режимов, описанная в книге Оболенского Ю.Г. Управление полетом маневренных самолетов. М., филиал Воениздат, 2007, с.248-260.
Однако данной системе присущи недостатки, описанные выше, не позволяющие обеспечить требуемые характеристики устойчивости и управляемости в продольном движении самолета на предельных углах атаки и перегрузках.
Целью настоящего изобретения является устранение указанных недостатков и обеспечение требуемых характеристик устойчивости и управляемости самолета при полетах на предельных углах атаки и перегрузках путем формирования сигнала допустимого угла атаки (перегрузки) и уменьшения перерегулирования в системе практически до нуля.
Поставленная цель достигается за счет того, что в систему автоматического управления полетом высокоманевренного самолета, содержащую блок датчиков, последовательно соединенные автомат продольного управления с ограничителем предельных режимов и привод, а также задатчик предельных значений углов атаки (перегрузок), причем выходы блока датчиков по сигналам перемещения ручки управления, угловой скорости тангажа и угла атаки (перегрузки) соединены с соответствующими входами автомата продольного управления с ограничителем предельных режимов, дополнительно введены функциональный блок, вход которого соединен с выходом блока датчиков по сигналу угла атаки (перегрузки), последовательно соединенные первое множительное устройство и первый сумматор, последовательно соединенные задатчик единичного сигнала и второй сумматор, последовательно соединенные второе множительное устройство и апериодическое звено, первые входы множительных устройств соединены с выходом задатчика предельных значений угла атаки (перегрузки), второй вход первого множительного устройства и второй, инвертирующий, вход второго сумматора соединены с выходом функционального блока, при этом выход второго сумматора соединен со вторым входом второго множительного устройства, а выход апериодического звена соединен со вторым входом первого сумматора, выход которого соединен с четвертым входом автомата продольного управления с ограничителем предельных режимов.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема заявляемой системы автоматического управления полетом высокоманевренного самолета.
Данная система содержит блок 1 датчиков, автомат 2 продольного управления с ограничителем предельных режимов (АПУ), привод 3, функциональный блок 4, задатчик 5 предельных значений углов атаки (перегрузки), первое множительное устройство 6, первый сумматор 7, задатчик 8 единичного сигнала, второй сумматор 9, второе множительное устройство 10, апериодическое звено 11.
Летчик, управляя самолетом, формирует на первом выходе блока 1 датчиков сигнал Хр, пропорциональный перемещению ручки управления. Данный сигнал через автомат 2 продольного управления с ограничителем предельных режимов подают на вход привода 3, осуществляя управление самолетом. Сигналы, пропорциональные возникающим при этом угловой скорости тангажа ωz и углу атаки α (нормальной перегрузке ny), со второго и третьего выходов блока 1 датчиков подаются соответственно на второй и третий входы автомата 2 продольного управления с ограничителем предельных режимов, в котором формируются соответствующие законы управления продольным движением самолета и ограничения предельных углов атаки (перегрузки). Сигнал с третьего выхода блока 1 датчиков, соответствующий углу атаки (перегрузке), подается также на вход функционального блока 4, формирующего коэффициент усиления K1 сигнала в зависимости от текущего значения угла атаки αтек (перегрузки ny тек). При этом, если текущее значение αтек (ny тек) не превышает первого заданного предельного значения, например 0,85αпред·(0,85ny пред), коэффициент К1=1, если текущее значение αтек (ny тек) превышают 0,85αпред, коэффициент усиления уменьшается, достигая величины, близкой к нулю, например K1=0-0,2 при αпред (ny пред). Сигнал, сформированный на выходе функционального блока 4, подается на второй вход первого множительного устройства 6 непосредственно, а на второй вход второго множительного устройства 10 - через второй сумматор 9, причем с коэффициентом усиления К2=1-K1. При этом на первые входы множительных устройств поступает сигнал с задатчика 5 предельных значений углов атаки (перегрузки). Сигнал с выхода множительного устройства 6 поступает на первый вход сумматора 7, а сигнал с выхода множительного устройства 10 через апериодическое звено 11 - на второй вход сумматора 7. Таким образом, на выходе данного сумматора формируется сигнал предельного угла атаки (перегрузки), зависящий от текущего значения угла атаки (перегрузки) и изменяющийся во времени, который в качестве дополнительного сигнала поступает на четвертый вход автомата 2 продольного управления с ограничителем предельных режимов.
В результате в заявляемой системе осуществляется активное изменение сигнала допустимого угла атаки (перегрузки) в диапазоне его предельных значений. Это обеспечивает уменьшение перерегулирования в системе по углу атаки (перегрузки) практически до нуля и позволяет существенно улучшить характеристики продольной устойчивости и управляемости при пилотировании самолета на предельных углах атаки и перегрузках по сравнению с прототипом, описанном выше, где в контуре управления с астатическим ограничителем предельных углов атаки (перегрузки) используется величина рассогласования между текущим и предельным значениями угла атаки (перегрузки).
Для реализации заявленной системы автоматического управления высокоманевренным самолетом не требуется специального оборудования. Так, в качестве интегрального блока датчиков может быть использован блок ИБД-51, а функции вычислителей (сумматоров, множительных устройств и т.п.) могут быть реализованы с помощью бортовой вычислительной машины.
Как показали результаты моделирования комплексной системы управления КСУ-941, при использовании данного технического решения представляется возможным свести значения перерегулирования по углам атаки и перегрузки практически к нулю при практически неизменном времени регулирования и существенно улучшить характеристики устойчивости и управляемости в системе. Таким образом, предлагаемая система реализуема и применима, в частности, для высокоманевренного самолета типа МИГ-29КУБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2385823C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2446429C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2459230C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2372250C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2325305C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2373111C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2644842C2 |
Изобретение относится к системам автоматического управления полетом высокоманевренного самолета, обеспечивающим требуемые характеристики продольной устойчивости и управляемости при пилотировании самолета на предельных углах атаки и перегрузках. Система содержит блок 1 датчиков, автомат 2 продольного управления с ограничителем предельных режимов (АПУ), привод 3, функциональный блок 4, задатчик 5 предельных значений углов атаки (перегрузки), первое множительное устройство 6, первый сумматор 7, задатчик 8 единичного сигнала, второй сумматор 9, второе множительное устройство 10, апериодическое звено 11. В системе осуществляется активное изменение сигнала допустимого угла атаки (перегрузки) в диапазоне его предельных значений. Достигается уменьшение перерегулирования в системе по углу атаки (перегрузки) практически до нуля, что позволяет существенно улучшить характеристики продольной устойчивости и управляемости при пилотировании самолета на предельных углах атаки и перегрузках. 1 ил.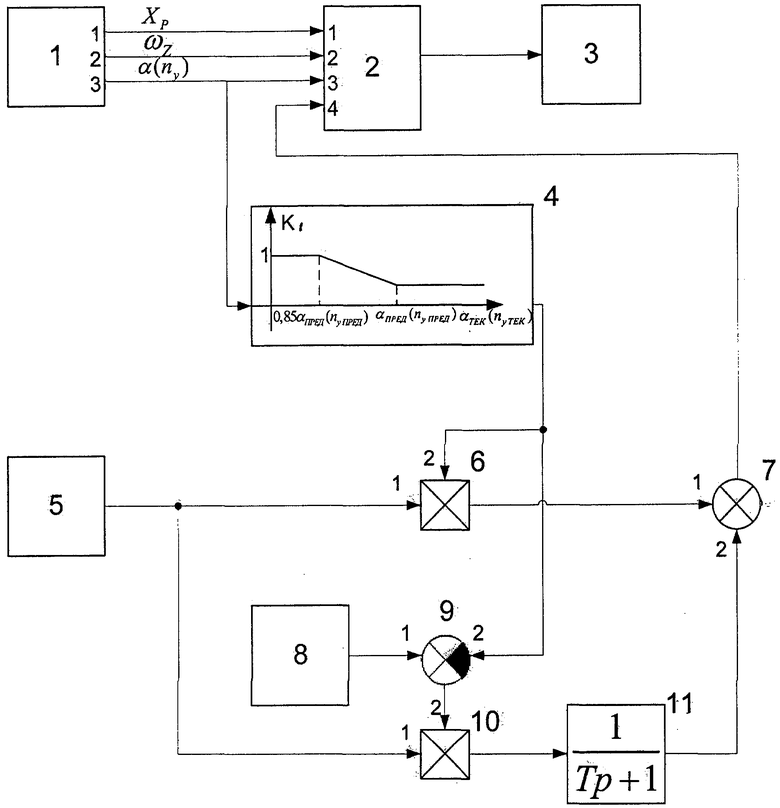
Система автоматического управления полетом высокоманевренного самолета, содержащая блок датчиков, последовательно соединенные автомат продольного управления с ограничителем предельных режимов и привод, а также задатчик предельных значений углов атаки (перегрузок), причем выходы блока датчиков по сигналам перемещения ручки управления, угловой скорости тангажа и угла атаки (перегрузки) соединены с соответствующими входами автомата продольного управления с ограничителем предельных режимов, отличающаяся тем, что в нее дополнительно введены функциональный блок, вход которого соединен с выходом блока датчиков по сигналу угла атаки (перегрузки), последовательно соединенные первое множительное устройство и первый сумматор, последовательно соединенные задатчик единичного сигнала и второй сумматор, последовательно соединенные второе множительное устройство и апериодическое звено, первые входы множительных устройств соединены с выходом задатчика предельных значений угла атаки (перегрузки), второй вход первого множительного устройства и второй, инвертирующий, вход второго сумматора соединены с выходом функционального блока, при этом выход второго сумматора соединен со вторым входом второго множительного устройства, а выход апериодического звена соединен со вторым входом первого сумматора, выход которого соединен с четвертым входом автомата продольного управления с ограничителем предельных режимов.
| Оболенский Ю.Г | |||
| Управление полетом маневренных самолетов | |||
| - М.: Филиал Воениздат, 2007, с.248-260 | |||
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| Методы анализа и расчета | |||
| - М.: Машиностроение, 1971, с.142, 146-150 | |||
| Система управления нормальной перегрузкой самолета с органами непосредственного управления подъемной силой | 1979 |
|
SU857939A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| GB 1239936 A, 21.07.1971 | |||
| US 6729579 B1, 04.05.2004 | |||
| US 5001646 A, 19.03.1991. | |||

