Предлагаемое изобретение относится к области ракетной техники, а именно к приводам управления, и может быть использовано в управляемых снарядах.
Актуальной проблемой развития блока рулевых приводов управления аэродинамическими поверхностями ракет или снарядов является увеличение скорости полета, что обуславливает повышение нагрузки на приводы и опорные устройства аэродинамических поверхностей и рост перегрузок на разгонном участке полета, при этом снаряд должен быть управляемым.
Известен блок рулевого привода управляемого снаряда, описанный в патенте РФ №2101667 и выбранный нами в качестве прототипа. Он содержит шпангоут, рули, закрепленные на осях, размещенных в шпангоуте, и рулевые машины, которые размещены с обеих сторон осей рулей и содержащие цилиндры двухстороннего действия.
Данная конструкция имеет существенный недостаток - при использовании рулевых машин, содержащих цилиндры двухстороннего действия, имеющие поршни, которые перемещаются вдоль оси снаряда, компенсирование массы подвижных частей при перегрузке разгонного участка приходится удерживать давлением одной из полостей рулевой машины, что перекашивает моментные характеристики привода и зачастую приводит к падению снаряда.
Целью данного изобретения является компенсирование массы подвижных деталей рулевой машины, что приводит к улучшению динамических характеристик и позволяет избежать влияние перегрузок на разгонном участке полета снаряда.
Поставленная задача решается конструкцией блока рулевого привода управляемого снаряда, который содержит шпангоут, аэродинамические рули, закрепленные на осях, размещенных в шпангоуте, и рулевые машины, которые размещены с обеих сторон осей аэродинамических рулей, при этом новым является то, что на торцевой поверхности каждой рулевой машины закреплен кронштейн, имеющий ось, на которой установлено коромысло, одним своим плечом соединенное со штоком рулевой машины, а другим плечом с тягой, размещенной между коромыслом и рычагом, жестко закрепленным на оси аэродинамических рулей. При этом коромысло соединено с рулевой машиной посредством шарнирного механизма, а тяга имеет подвижное соединение с коромыслом.
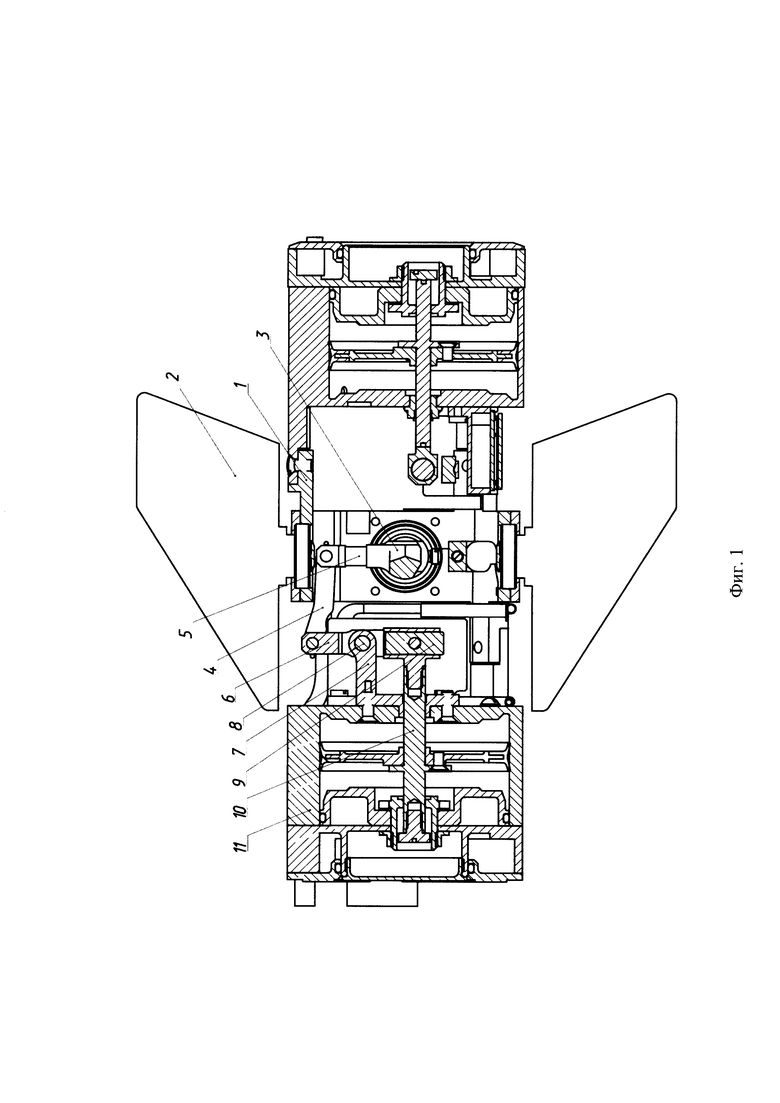
Заявленное решение поясняется графическим материалом - фиг. 1, где изображен блок рулевого привода, состоящий из шпангоута 1, аэродинамических рулей 2, оси аэродинамических рулей 3, взаимодействующей с тягой 4 через рычаг 5. Тяга 4, в свою очередь, связана подвижно с коромыслом 6, висящим на кронштейне 7 с помощью оси 8, другое плечо которого соединено через шарнирный механизм 9 со штоком рулевой машины 10, при этом кронштейн 7 закреплен на рулевой машине 11.
Блок рулевого привода управляемого снаряда работает следующим образом. Набегающий поток воздуха, попадая в рулевую машину 11, заставляет перемещаться шток 10, который взаимодействует с коромыслом 6. Коромысло 6 через тягу 4 взаимодействует с рычагом 5, заставляя поворачивать ось аэродинамических рулей 3 на заданный угол, при этом тяга 4, являющаяся балансиром, расположена относительно осей аэродинамических рулей 3 таким образом, что компенсирует собой массу подвижных частей.
Благодаря данному техническому решению стартовое ускорение и ускорение торможения, не зависимо от траекторий полета, не влияют на развиваемый момент и максимальную скорость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2138764C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2370727C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2003 |
|
RU2244897C1 |
| МЕХАНИЗМ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ | 2005 |
|
RU2316720C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| АРРЕТИР РУЛЕВОГО ЭЛЕКТРОПРИВОДА РАКЕТЫ | 2010 |
|
RU2426071C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТЯЖЕЛЕЕ ВОЗДУХА | 1998 |
|
RU2142388C1 |
| Отсек рулевого привода управляемой ракеты | 2020 |
|
RU2743420C1 |
Изобретение относится к области ракетной техники, а именно к приводам управления, и может быть использовано в управляемых снарядах. Заявлен блок рулевых приводов управляемого снаряда, который содержит шпангоут, аэродинамические рули, закрепленные на осях, размещенных в шпангоуте, и рулевые машины, которые размещены с обеих сторон осей аэродинамических рулей. На торцевой поверхности каждой рулевой машины закреплен кронштейн, имеющий ось, на которой установлено коромысло, одним своим плечом соединенное со штоком рулевой машины, а другим плечом - с тягой, размещенной между коромыслом и рычагом, жестко закрепленным на оси аэродинамических рулей. При этом коромысло соединено с рулевой машиной посредством шарнирного механизма, а тяга имеет подвижное соединение с коромыслом. Задачей, решаемой данным изобретением, является компенсирование массы подвижных деталей рулевой машины. 2 з.п. ф-лы, 1 ил.
1. Блок рулевого привода управляемого снаряда, содержащий шпангоут, аэродинамические рули, закрепленные на осях, размещенных в шпангоуте, и рулевые машины, которые размещены с обеих сторон осей аэродинамических рулей, отличающийся тем, что на торцевой поверхности каждой рулевой машины закреплен кронштейн, имеющий ось, на которой установлено коромысло, одним своим плечом соединенное со штоком рулевой машины, а другим плечом - с тягой, размещенной между коромыслом и рычагом, жестко закрепленным на оси аэродинамических рулей.
2. Блок рулевого привода управляемого снаряда по п. 1, отличающийся тем, что коромысло соединено с рулевой машиной посредством шарнирного механизма.
3. Блок рулевого привода управляемого снаряда по пп. 1, 2, отличающийся тем, что тяга имеет подвижное соединение с коромыслом.
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2276771C2 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257534C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2138764C1 |
| WO 9613694 A1, 09.05.1996 | |||
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2149345C1 |

