Изобретение относится к способам и системам определения местоположения путем сопоставления в одной системе координат нескольких найденных пеленгов, в частности к способам контроля состояния охраняемых объектов как стационарных, так и подвижных.
Заявленный способ расширяет арсенал технических средств данного назначения.
Известны способы контроля состояния охраняемых объектов.
Так, известный способ контроля местоположения транспортных средств (по Авт. св. СССР № 1837343, МПК5 G 08 C 17/001, опубл. 30.08.93 г., бюл. № 32) заключается в измерении каждым контролируемым транспортным средством своего местоположения, формировании радиосигнала, содержащего информацию о местоположении, и его излучении с временной задержкой, соответствующей адресу транспортного средства, приеме задержанного радиосигнала центром управления, оценке времени задержки, по результатам которой формируют сигнал местоположения транспортного средства.
Недостатком данного аналога является относительно большое время поиска подвижного объекта, что обусловлено невысокой точностью местоопределения подвижного объекта.
Известен также способ охраны транспортных средств (по пат. РФ № 2110845, МПК6 G 08 B 25/10, опубл. 10.05.98 г., бюл. № 10), заключающийся в том, что для активизации передатчика, установленного на транспортном средстве, излучении сигнала и приеме этого сигнала сетью пеленгаторных станций используют узкополосный приемник, принимающий от мощного передатчика циркулярных сообщений в состоянии покоя несущую, а в состоянии тревоги - уникальный код, при совпадении которого с кодом транспортного средства активизируют передатчик и исполнительные устройства тревожной сигнализации. Передатчик и исполнительные устройства активизируют либо самим владельцем транспортного средства, либо автоматически - при несанкционированном выезде транспортного средства за пределы зоны обслуживания мощного передатчика циркулярных сообщений.
Недостатком данного аналога является относительно большое время поиска подвижного объекта, что обусловлено невысокой точностью местоопределения подвижного объекта.
Наиболее близким по своей технической сущности к заявленному является известный способ охраны транспортных средств по пат. РФ № 2032227, МПК6 G 08 B 25/10, опубл. 27.03.95 г., бюл. № 9.
В способе-прототипе при несанкционированном доступе в охраняемый объект (транспортное средство) или по команде его владельца активизируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают сигнал тревоги, принимают его на N пеленгаторных станциях, где N≥2, и вычисляют пеленги. На центральной станции контроля сигнал тревоги декодируют и выделяют информацию об отличительных признаках охраняемого объекта. Затем эти признаки идентифицируют путем их сравнения с предварительно заданными в базу данных центральной станции контроля отличительными признаками охраняемого объекта, излучающего сигнал тревоги. После идентификации объекта оперативная группа выезжает на обнаружение охраняемого объекта.
По сравнению с рассмотренными выше аналогами в способе-прототипе за счет большей информативности сигнала тревоги достигается некоторое повышение оперативности поиска охраняемого объекта.
Недостатком способа-прототипа является относительно большое время поиска подвижного объекта, обусловленное невысокой точностью местоопределения подвижного охраняемого объекта. Это объясняется тем, что ошибки пеленгования источника излучения, установленного на подвижном объекте, постоянно изменяются и носят случайный характер из-за влияния удаленного окружения и поэтому не могут быть устранены известными методами калибровки. Путем калибровки невозможно также устранить ошибки, вызванные влиянием флуктуирующих во времени источников помех (промышленных, атмосферных). Кроме того, характер излучения отдаленного окружения, а также интерференционная картина сигналов тревоги не остаются постоянными во времени из-за изменчивости погоды, времени суток и других условий распространения радиоволн.
Целью изобретения является разработка способа контроля состояния охраняемого объекта, обеспечивающего уменьшение времени поиска подвижного охраняемого объекта за счет повышения точности его местоопределения путем минимизации ошибок пеленгования, обусловленных изменяющимся во времени влиянием отдаленного окружения пеленгаторных станций, а также изменением интерференции сигнала тревоги, излучаемого подвижным охраняемым объектом.
Поставленная цель достигается тем, что в известном способе контроля состояния охраняемого объекта, заключающемся в том, что при несанкционированном доступе в охраняемый объект или по команде его владельца активизируют радиопередатчик, установленный на охраняемом объекте, формируют сигнал тревоги, включающий информацию об отличительных признаках охраняемого объекта, кодируют и излучают кодированный сигнал тревоги, принимают его на N пеленгаторных станциях, где N≥2, вычисляют пеленги βj, где j=1,...N, декодируют сигнал тревоги, из которого выделяют информацию об отличительных признаках охраняемого объекта, идентифицируют их путем сравнения с предварительно занесенными в базу данных центральной станции контроля отличительными признаками охраняемых объектов, определяют его местоположение, после чего начинают поиск охраняемого объекта, излучающего сигнал тревоги, дополнительно в базу данных центральной станции контроля заносят данные об истинном местоположении стационарных охраняемых объектов, а после идентификации на центральной станции контроля отличительных признаков подвижного охраняемого объекта, излучающего сигнал тревоги, и определения его местоположения выделяют из базы данных истинные пеленги α
Уточненные пеленги β
где kij - весовой коэффициент ошибки пеленга на i-ый стационарный охраняемый объект с j-ой пеленгаторной станции, который, в свою очередь вычисляют следующим образом:

здесь Rmin - наименьшее из всех ранее рассчитанных Ri-ых расстояний.
Благодаря указанной новой совокупности существенных признаков за счет учета ошибок пеленга, полученных при пеленгации стационарных охраняемых объектов с известными координатами во время излучения сигнала тревоги подвижным охраняемым объектом, достигается повышение точности местоопределения подвижного охраняемого объекта, излучающего сигнал тревоги, что, в свою очередь, ведет к уменьшению времени его поиска.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризуемые совокупностью признаков, тождественной всем существенным признакам заявленного технического решения, отсутствуют в известных источниках информации, что указывает на соответствие заявленного способа условию патентоспособности “новизна”.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с признаками, отличающими заявленный способ от прототипа, показали, что отличительные существенные признаки заявленного технического решения не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного способа преобразований на достижение указанного технического результата. Следовательно, заявленное техническое решение соответствует условию патентоспособности “изобретательский уровень”.
Заявленный способ поясняется чертежами, на которых показаны:
на фиг.1 - общая структура системы контроля состояния охраняемого объекта;
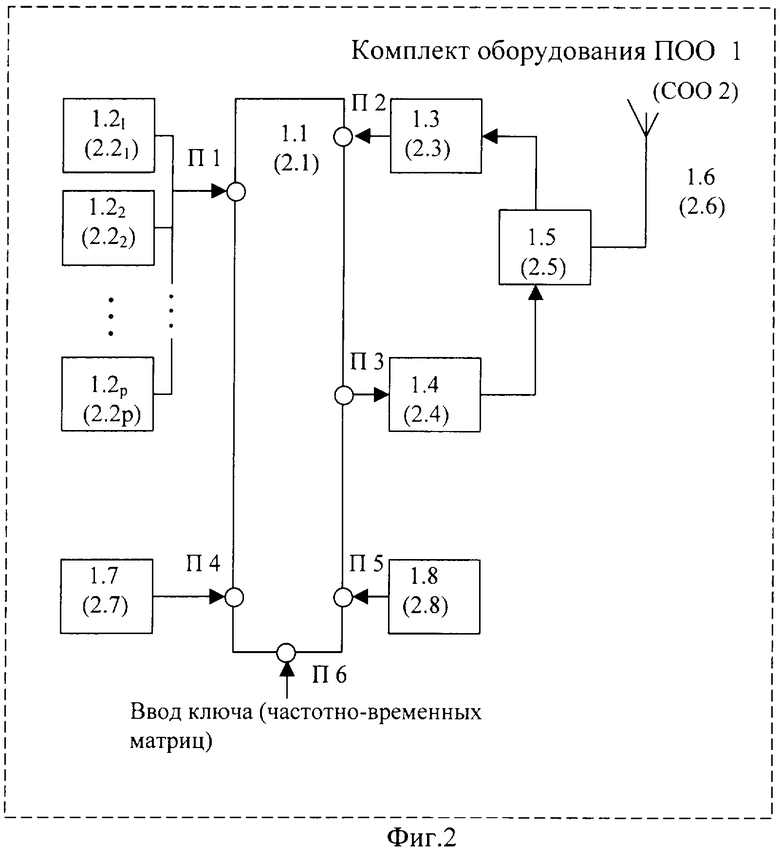
на фиг.2 - состав комплекта оборудования стационарного охраняемого объекта;
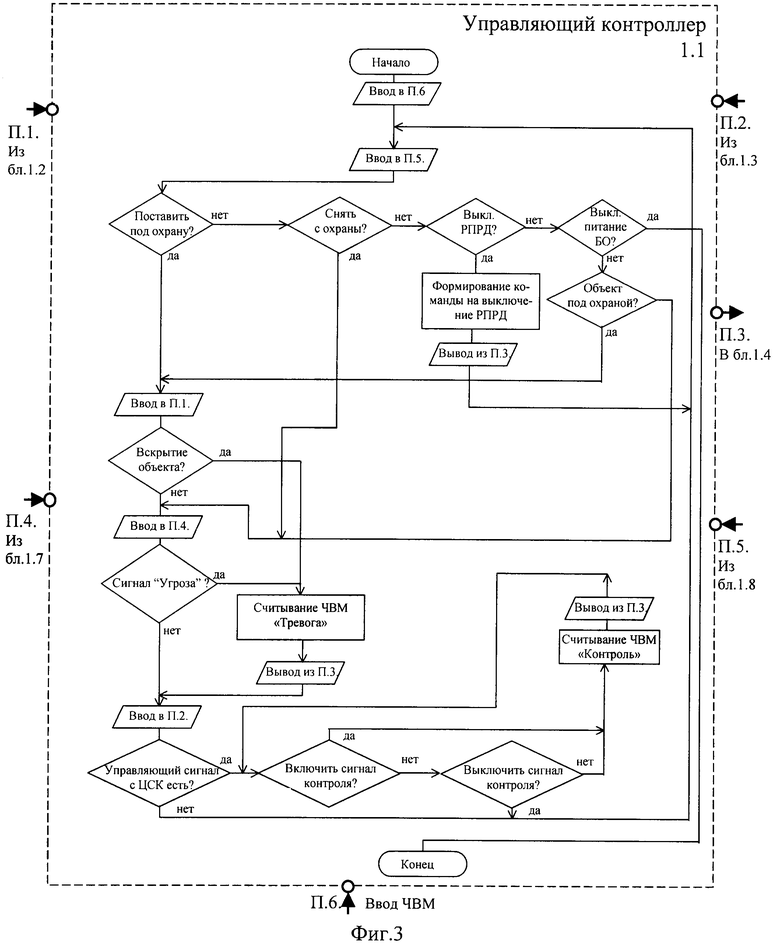
на фиг.3 - алгоритм работы микропроцессора, реализующего функции управляющего контроллера;
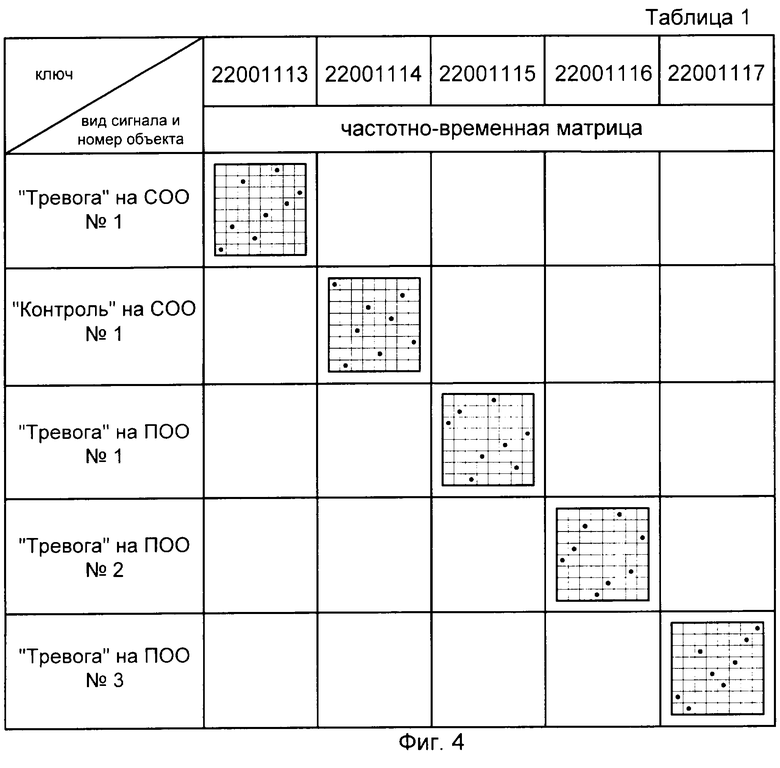
на фиг.4 - структура частотно-временных матриц для различных сигналов, формируемых на охраняемом объекте;
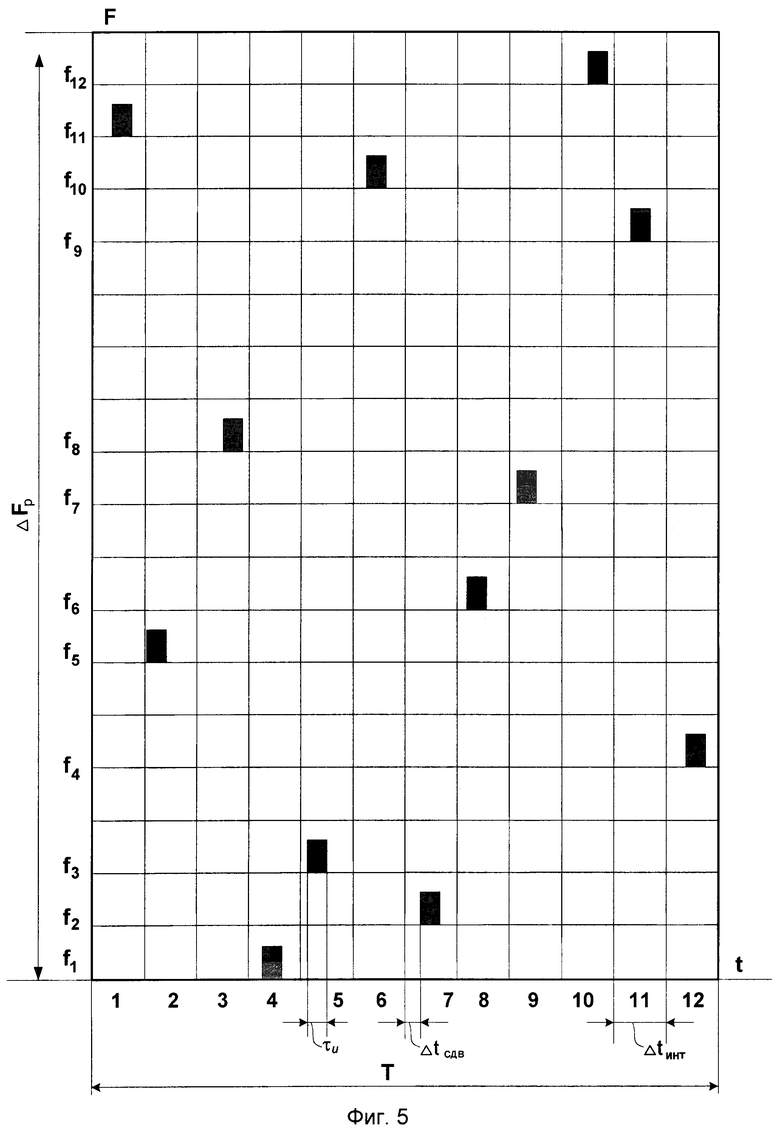
на фиг.5 - вариант сформированной частотно-временной матрицы;
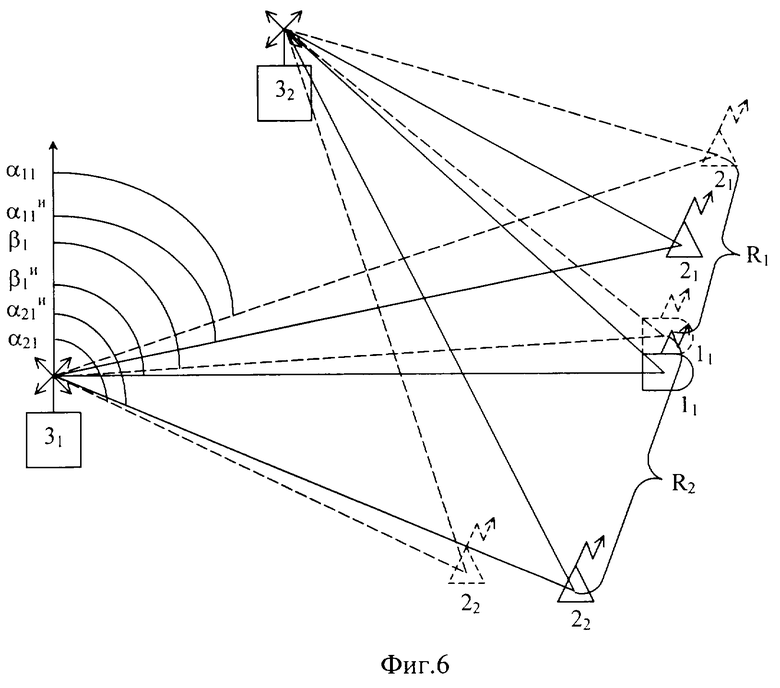
на фиг.6 - схема, поясняющая процесс вычисления пеленгов на одной из пеленгаторных станций.
Сущность заявленного способа можно рассмотреть на примере системы контроля состояния охраняемых объектов, показанной на фиг.1.
В общем виде система включает совокупность из М подвижных охраняемых объектов (ПОО) 11-1M и L стационарных охраняемых объектов (СОО) 21-2L каждый из которых снабжен комплектом бортового оборудования, группу из N пеленгаторных станций 31-3N, центральную станцию контроля (ЦСК) 4 и сеть из К радиопередатчиков 51-5K, управляемых ЦСК 4.
Каждый ПОО 1 снабжен комплектом оборудования, показанным на фиг.2. Возможный вариант оборудования ПОО 1 включает управляющий контроллер (УК) 1.1, снабженный входными и выходными портами П 1-П 6, группу из Р датчиков охранной сигнализации (ДОС) 1.21-1.2Р, выходы которых объединены и подключены к входному порту П 1 УК 1.1, радиоприемник (РПРМ) 1.3 и радиопередатчик (РПРД) 1.4, выход и вход которых соответственно подключены к портам П 2 и П 3 УК 1.1, а их вход и выход через антенный коммутатор 1.5 подключены к антенне 1.6. Кроме того, комплект оборудования СОО включает кнопку “Угроза” 1.7, выходы которой подключены к входному порту П 4.
Дополнительно УК 1.1 снабжен входным портом “ввод ключа” (или ввод частотно-временных матриц - ЧВМ) П 6 и входным портом П 5 для ввода сигналов постановки, снятия с охраны и выключения РПРД 1.4 от внешнего пульта управления 1.10, который может передавать сигналы как по проводам, так и по радиоканалу.
Управляющий контроллер 1.1 может быть реализован в виде микропроцессора, алгоритм работы которого представлен на фиг.3.
Комплект оборудования, устанавливаемый на СОО 2, аналогичен комплекту 1 (см. фиг.2).
В системе контроля состояния охраняемых объектов предусмотрено формирование следующих сигналов.
На ПОО 1 формируют:
сигнал “Тревога” при несанкционированном вскрытии ПОО 1 или при нажатии владельцем кнопки “Угроза”.
На СОО 2 формируют:
сигнал “Тревога” при несанкционированном вскрытии СОО 2 или при нажатии владельцем кнопки “Угроза”;
сигналы контроля между СОО 2 и ЦСК 4.
На ЦСК 4 формируют:
управляющие сигналы на включение на СОО 2 сигнала контроля при определении СОО 2 на ЦСК 4 как ближайшего СОО 2 к ПОО 1, излучающему сигнал тревоги, и выключение сигнала контроля.
При принятии системой контроля объекта на обслуживание ему присваивают индивидуальный ключ (для ПОО 1) или совокупность ключей (по числу формируемых сигналов - для СОО 2 их два), например, в виде последовательности цифр (см. таблицу на фиг.4). Затем все сигналы кодируют с использованием предварительно сформированных частотно-временных матриц (ЧВМ) следующим образом (фиг.5).
Каждая ЧВМ представляет собой совокупность радиочастотных импульсов - РЧИ (на фиг.5 таких импульсов 12) f1_f12. Номиналы частот f1_f12 случайным образом распределены в пределах разрешенного для использования частотного интервала ΔFразр. Каждый РЧИ длительностью τи расположен со случайным временным сдвигом Δtсдв относительно начала временного интервала Δtинт. Формирование ЧВМ может выполняться любым известным способом, в частности с помощью датчика случайных чисел. При этом для каждого временного интервала Δtинт должны быть заданы коды, определяющие временной сдвиг РЧИ и номинал его частоты. В общем случае число временных интервалов длительностью Δtинт и число соответствующих им частот РЧИ может быть произвольным и выбирается из соображений рационального использования выделенного частотного диапазона и числа объектов, находящихся на обслуживании у системы контроля.
Таким образом, в рассматриваемом способе для всех видов сигналов, формируемых на ПОО 1 и СОО 2, назначают один или два ключа (например, сигналу “Тревога” на СОO 21 №1 - ключ 22001113, см. фиг.4) и формируют соответствующую ему ЧВМ (фиг.4). Все ЧВМ предварительно вводят (через порт П 6, фиг.2) в память управляющего контроллера 2.1 СОО 2 или 1.1 ПОО 1 и в память ЦСК 4. Причем любая ЧВМ конкретного охраняемого объекта соответствует введенным в базу данных ЦСК 4 отличительным признакам этого объекта. Для транспортного средства (ПОО 1) такими признаками могут быть марка, цвет, государственный номер, Ф.И.О. владельца, адрес владельца и т.п.
Таким образом, независимо от вида сигнала, принятого на ЦСК 4 от охраняемого объекта, его идентификация заключается в поиске в базе ЧВМ идентичной принятой ЧВМ. Причем идентифицированная ЧВМ однозначно указывает на вид принятого сигнала и на отличительные признаки охраняемого объекта, подающего этот сигнал.
Кроме вышеперечисленного, отличается и порядок принятия системой контроля на обслуживание на ЦСК ПОО 1 и СОО 2. В базу данных ЦСК 4 дополнительно заносят данные об истинном местоположении СОО 2.
После предварительного введения исходных данных в управляющие контроллеры 2.1 СОО 2 и 1.1 ПОО 1 и в базу данных ЦСК 4 система готова к работе.
Владелец ПОО 1 с помощью внешнего пульта управления 1.8 формирует сигнал на принятие объекта под охрану, который через порт П 5 поступает в УК 1.1. При несанкционированном вскрытии ПОО 1, находящегося под охраной, по сигналам одного или нескольких сработавших ДОС 1.2 на ПОО 1 формируют, кодируют и излучают сигнал “Тревога”. При этом в УК 1.1 сигнал “Тревога” кодируют путем считывания соответствующей ему кодовой комбинации ЧВМ, предварительно введенной в УК 1.1 через порт П 6, после чего формируют команду на включение РПРД 1.4. Кодовая комбинация ЧВМ и команда на включение через порт П 3 поступают на вход РПРД 1.4, затем излучают сигнал “Тревога” (см. фиг.1 и 3). Излученный сигнал принимают сетью пеленгаторных станций 31-3N, на которых вычисляют пеленги βj, где j=1,...N, значения пеленгов вместе с принятым сигналом передают на ЦСК 4. От пеленгаторных станций 31-3N сигналы и данные пеленгов на ЦСК 4 могут передаваться по проводным, радиорелейным и т.п. каналам связи. На ЦСК 4 сигнал декодируют путем сравнения принятой ЧВМ с предварительно занесенными в базу данных ЧВМ, а по найденной в базе данных ЧВМ идентифицируют ПОО 1 и рассчитывают предварительное местоположение ПОО 1. Полученные таким образом координаты местоположения ПОО 1 в первоначальный момент запоминают. Далее по имеющимся в базе данных координатам СОО 2 определяют S СОО 2 ближайших по расстоянию к ПОО 1, излучающему сигнал тревоги, определяют идентификационные признаки S СОО 2, а также истинные пеленги α
При этом уточненные пеленги на ПОО 1, излучающий сигнал тревоги, для каждой из N пеленгаторных станций 3 рассчитывают по формуле
где kij - весовой коэффициент ошибки пеленга на i-ый СОО 1 с j-ой пеленгаторной станции 3j, который может зависеть, например, от величины угла между пеленгом на ПОО 1 и истинным пеленгом на i-ый стационарный охраняемый объект 2 или от расстояния между ПОО 1 и i-ым СОО 2. В последнем случае он может рассчитываться следующим образом
где Ri - расстояние между предварительным местоположением ПОО 1 и истинным положением i-ого СОО 2, а Rmin - наименьшее из всех ранее рассчитанных Ri-ых расстояний Rmin=min(R1,...Ri,...Rs).
По рассчитанным уточненным пеленгам  определяют окончательное местоположение ПОО 1, излучающего сигнал тревоги, и принимают меры по его поиску.
определяют окончательное местоположение ПОО 1, излучающего сигнал тревоги, и принимают меры по его поиску.
При нажатии кнопки “Угроза” владельцем ПОО 1 (например, при попытке насильственного захвата ПОО 1 или угрозе жизни его владельцу) на ПОО 1 также формируют, кодируют и излучают сигнал “Тревога”, по которому аналогично определяют местонахождение ПОО 1 и принимают меры по его поиску. После снятия с охраны ПОО 1 владельцем сигнал “Тревога” будет формироваться только при нажатии кнопки “Угроза”, а не по сигналам ДОС 1.2.
После принятия СОО 2 под охрану и срабатывании одного или нескольких ДОС 2.1 или нажатии кнопки “Угроза” на СОО 2 также формируют, кодируют и излучают сигнал “Тревога”. Но, в отличие от ПОО 1, сигнал тревоги достаточно принять хотя бы на одной из N пеленгаторных станций 31-3N, так как в этом случае нет необходимости решать задачу местоопределения и вычислять пеленги, а данные о координатах, после декодирования сигнала тревоги, выделения информации об отличительных признаках и идентификации их с признаками СОО 2, уже имеются в базе данных ЦСК 4.
Таким образом, для СОО 2 зона контроля предлагаемой системой по сравнению с зоной контроля ПОО 1 значительно увеличивается.
Операция определения пеленга (азимута) на охраняемый объект 1 или 2 относительно каждой пеленгаторной станции 3 известна и может быть реализована, например, с использованием угломерных радиопеленгационных систем, описанных в книгах: Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - С.246-272; Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964. - С.15-35.
Операция местоопределения источника радиоизлучения по измеренным пеленгам сетью пеленгационных станций 3 также известна. В соответствии с рекомендациями МККР, местоопределение может выполняться методом триангуляции или любым другим способом координатометрии, описанным, например, в книге: Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964. - С.571-608.
Таким образом при использовании рассмотренной новой совокупности существенных признаков заявленного способа обеспечивается сокращение времени обнаружения ПОО 1 при подаче им сигналов тревоги за счет минимизации ошибок его местоопределения, обусловленных изменяющимся во времени влиянием дальнего окружения пеленгаторных станций, изменением условий интерференции сигнала, излученного ПОО 1, а также изменений условий распространения радиоволн и помеховой обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2002 |
|
RU2221279C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2008 |
|
RU2370824C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 1996 |
|
RU2110845C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
Изобретение относится к способам и системам определения местоположения путем сопоставления в одной системе координат нескольких найденных пеленгов, в частности к способам контроля состояния охраняемых объектов как стационарных, так и подвижных. Способ обеспечивает уменьшение времени поиска подвижного охраняемого объекта, при этом окончательное местоположение подвижного объекта, излучающего сигнал тревоги, определяют по уточненным пеленгам βju на него с N пеленгаторных станций, которые рассчитывают по формуле
где j=1,...N; i=1,...S, S - ближайшие к подвижному объекту стационарные охраняемые объекты; Δαij=α

где kij - весовой коэффициент ошибки пеленга на i-ый стационарный охраняемый объект c j-ой пеленгаторной станции.

где Rmin - наименьшее из всех ранее рассчитанных Кi-х расстояний.
| СПОСОБ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2032227C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| US 4728959 A, 01.03.1988 | |||
| US 6356822 A, 12.03.2002 | |||
| US 6111543 A, 29.08.2000 | |||
| ГЕРМЕТИЗИРУЮЩАЯ КОМПОЗИЦИЯ | 2004 |
|
RU2270226C1 |
| DE 3131494, 24.02.1983. | |||

