Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения операций при обслуживании машин и оборудования. Такие механизмы обеспечивают захват изделия, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с выходными звеньями и губками для захвата изделий, и привод, передаточный механизм содержит неподвижный кулачок, его выходное звено подвижно сопряжено с ведущим звеном, связано с упомянутым кулачком и является ведущим звеном исполнительного механизма (патент 2217296 РФ, опубл. в БИПМ, 2003. - №33 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является его небольшая производительность. За один оборот ведущего звена передаточного механизма устройство совершает один рабочий цикл. Иначе говоря, у прототипа малая частота повторения рабочих циклов. Уменьшение же времени рабочих циклов путем интенсификации процесса передачи изделий практически исключено, поскольку при этом снижается качество выполнения операций «схват изделия» и «выдача изделия». Снижение качества выполнения упомянутых операций связано с тем, что на границах ходов выходные звенья исполнительного механизма с губками совершают лишь «мгновенные» выстой, при которых имеет место мгновенное изменение скорости выходных звеньев.
Упомянутый недостаток особенно ощутим при использовании прототипа для передачи изделий между машинами в автоматизированных технологических линиях, а также при агрегатировании с отдельными машинами-автоматами.
Задачей настоящего изобретения является повышение производительности и точности выполнения операций «схват изделия» и «выдача изделия».
Решение поставленной задачи достигается тем, что в манипуляторе для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и неподвижным кулачком и исполнительного механизма с выходными звеньями и губками для захвата изделий, ведущим звеном которого является выходное звено передаточного механизма, и привод, ведущее звено передаточного механизма выполнено в виде пустотелого стержня, жестко связанного в средней его части с валом привода, выходное звено передаточного механизма выполнено двуплечим и подвижно сопряжено с ведущим звеном по всей длине последнего, на свободном конце каждого из плеч выходного звена смонтированы выходные звенья соответствующего исполнительного механизма с губками для захвата изделий, в теле неподвижного кулачка выполнен замкнутый фигурный паз для взаимодействия с роликом, смонтированным на одном из плеч выходного звена передаточного механизма.
Подвижное сопряжение ведущего и выходного звеньев передаточного механизма выполнено в виде шлицевого соединения, содержащего продольные канавки по длине выходного звена для шлицевых зубьев, выполненных в теле ведущего звена.
Предлагаемое конструктивное и схемное выполнение ведущего и выходного звеньев и неподвижного кулачка передаточного механизма манипулятора обеспечивает повышение его производительности и точности функционирования при прочих равных условиях с прототипом. Жесткая связь ведущего звена передаточного механизма в средней его части с валом привода оказывается предпочтительной для сопряжения с двуплечим выходным звеном. Поскольку в периоде кинематического цикла (в интервале полного оборота ведущего звена) плечи выходного звена последовательно совершают рабочий ход (одно плечо с изделием) и холостой ход (другое плечо без изделия), упомянутая связь ведущего звена с валом привода способствует выравниванию необходимого движущего момента на валу привода. Иначе говоря, при движении сглаживаются изгибающие моменты, генерируемые нагружением плеч выходного звена передаточного механизма. Выполнение выходного звена двуплечим предопределило возможность использования каждого из плеч для кинематической связи с выходными звеньями с губками для захвата изделий. При такой структуре кинематической цепи исключается наличие холостых ходов в периоде кинематического цикла, при этом производительность разработанного манипулятора будет в два раза больше, чем производительность прототипа при прочих равных условиях. Взаимодействие ролика, смонтированного на одном из плеч выходного звена передаточного механизма, с замкнутым фигурным пазом в теле неподвижного кулачка генерирует сложное движение выходного звена, несущего выходные звенья исполнительного механизма с губками для захвата изделий. Выходное звено передаточного механизма совершает круговое движение и возвратно-поступательное движение, при этом закон поступательного движения выходного звена формируется рабочим профилем фигурного паза в теле неподвижного кулачка.
Выполнение подвижного сопряжения выходного и ведущего звеньев передаточного механизма в виде шлицевого соединения обеспечивает точность плоскостного движения выходных звеньев исполнительного механизма (обеспечивается движение выходных звеньев исполнительного механизма, смонтированных на разных плечах передаточного механизма, в одной плоскости). Исключаются перекосы и заклинивания при движении.
Заявляемый манипулятор отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют упрощению конструкции, повышению точности работы и производительности.
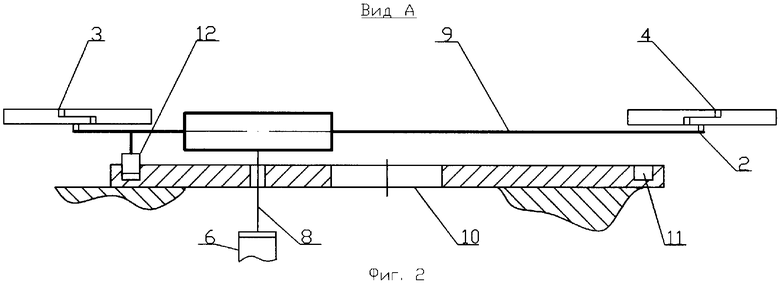
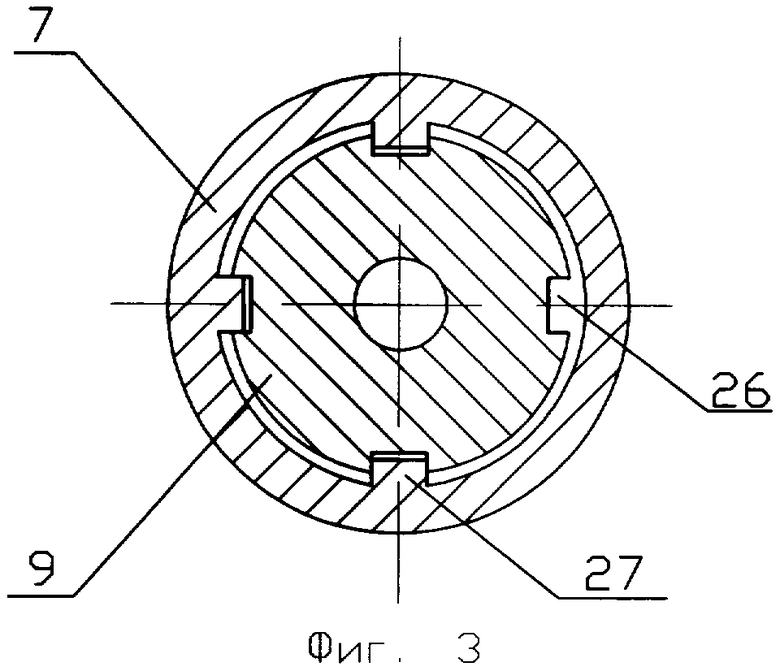
Предлагаемый манипулятор поясняется чертежами. На фиг.1 представлена кинематическая схема манипулятора; на фиг.2 - вид А на фиг.1; на фиг.3 - сопряжение ведущего и выходного звеньев передаточного механизма.
Манипулятор для передачи изделий содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительных механизмов 3 и 4, с губками 5 для захвата изделий, и привод 6.
Передаточный механизм 2 включает ведущее звено 7, выполненное в виде пустотелого стержня, жестко связанное в средней его части с валом 8 привода 6, выходное звено 9, выполненное двуплечим и подвижно сопряженное с ведущим звеном 7 по всей длине последнего, и неподвижный кулачок 10. Кулачок 10 выполнен в виде плиты с замкнутым фигурным пазом 11 для взаимодействия с роликом 12, смонтированным на одном из плеч звена 9.
Исполнительные механизмы 3 и 4 выполнены адекватными, каждый из механизмов включает ведущее звено, функцию которого выполняет выходное звено 9 передаточного механизма, выходные звенья 13 и 14 с губками 5 для захвата изделий, смонтированные на свободных концах соответствующих плеч звена 9, и раздвижные клинья 15 и 16 с продольными фигурными пазами 17 и 18 на их боковинах. Звенья 13 и 14 шарнирно связаны между собой и с соответствующим плечом звена 9 посредством пальца 19, жестко закрепленного на конце плеча звена 9. На свободных концах выходных звеньев 13 и 14 смонтированы ролики 20 и 21 для взаимодействия с фигурными пазами 17 и 18 раздвижных клиньев 15 и 16. Исходное положение выходных звеньев 13 и 14, при котором губки занимают сжатое положение, обеспечивается силовым упругим элементом - пружиной 22 растяжения. В сжатом положении губок, когда ролики 20 и 21 не взаимодействуют с пазами 17 и 18 раздвижных клиньев, пружина 22 обеспечивает жесткое замыкание выходных звеньев 13 и 14 с пальцем 19.
Раздвижные клинья 15 и 16 смонтированы в позициях «схват изделия» и «выдача изделия» и закреплены на стойках 23 и 24. Клинья имеют одинаковое конструктивное исполнение. В позиции «выдача изделия» установлен склиз 25 (фиг.1) для гравитационного отвода изделия из позиции после разжатия губок исполнительного механизма.
Шлицевое соединение ведущего и выходного звеньев передаточного механизма (фиг.3) включает продольные канавки 26, выполненные на наружной поверхности звена 9 по всей его длине, и шлицевые зубья 27, выполненные на внутренней поверхности пустотелого ведущего звена 7.
Манипулятор для передачи изделий работает следующим образом.
При работе привода 6 ведущее звено 7 передаточного механизма, закрепленное на валу 8 привода, совершает вращательное движение с постоянной скоростью. При этом выходное звено 9, сопряженное с ведущим звеном посредством шлицевого соединения, также совершает вращательное движение. Кроме того, в результате взаимодействия ролика 12 с фигурным пазом 11 неподвижного кулачка 10 выходное звено совершает возвратно-поступательное движение вдоль своей продольной оси. Сложное движение выходного звена 9 в функции ведущих звеньев исполнительных механизмов 3 и 4 генерирует движение выходных звеньев 13 и 14 с губками для захвата изделий.
На участках движения выходных звеньев 13 и 14 в сжатом положении губок 5 пружина 22 обеспечивает жесткое сцепление выходных звеньев с пальцем 19, при этом звенья 13 и 14 и выходное звено 9 образуют жесткую поворотную систему. При взаимодействии роликов 20 и 21 с фигурными пазами 17 и 18 на боковинах раздвижных клиньев 15 и 16 обеспечивается поворот выходных звеньев 13 и 14 и разжатие (сжатие) губок 5. В период взаимодействия роликов 20 и 21 с пазами клиньев выполняется операция «схват изделия» (подача изделия в губки) или операция выдачи изделия на склиз 25.
За период кинематического цикла, равного времени одного оборота ведущего звена 7 передаточного механизма, манипулятор совершает два рабочих цикла. Интервалы ходов исполнительных механизмов 3 и 4 манипулятора совмещены во времени. Так, при рабочем ходе (с изделием) исполнительного механизма 3 механизм 4 совершает холостой ход (без изделия) и наоборот. При работе манипулятора обеспечивается непрерывность процесса передачи изделий из позиции «схват изделия» в позицию «выдача изделия».
Продольные канавки 26 на выходном звене 9 выполнены сквозными (по все длине звена), число шлицевых зубьев 27, из условия технологичности их изготовления, может соответствовать числу канавок либо быть меньше числа канавок, при этом шаг между средними линиями канавок и зубьев должен быть одинаковым.
Процесс взаимодействия роликов 20 и 21 с фигурными пазами 17 и 18 раздвижных клиньев включает три периода: начальный период - разжатие губок; средний период - подача изделия в полностью разжатые губки (или выдача изделия из губок); конечный период - сжатие губок («схват изделия» или имитация «схвата» без изделия).
В сравнении с прототипом разработанный манипулятор обеспечивает в два раза большую производительность при прочих равных условиях, например, при том же времени кинематического цикла, т.е. при той же частоте вращения ведущего звена передаточного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224641C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521935C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331506C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
Изобретение относится к механизмам со сложным движением выходных звеньев. Манипулятор содержит передаточный механизм, исполнительные механизмы с губками для захвата изделий и привод. Передаточный механизм включает ведущее звено, выполненное в виде пустотелого стержня, жестко связанного в средней его части с валом привода, выходное звено, выполненное двуплечим и подвижно сопряженное с ведущим звеном, и неподвижный кулачок с фигурным пазом для взаимодействия с роликом выходного звена. Каждый из исполнительных механизмов включает ведущее звено, функцию которого выполняет выходное звено передаточного механизма, выходные звенья с губками для захвата изделий, смонтированные на концах плеч выходного звена передаточного механизма, раздвижные клинья с фигурными пазами на их боковинах. Раздвижные клинья смонтированы в позициях «схват изделия» и «выдача изделия». Манипулятор отличается повышенной производительностью и точностью функционирования. 1 з.п. ф-лы, 3 ил.
1. Манипулятор для передачи изделий, содержащий комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и неподвижным кулачком и исполнительных механизмов с выходными звеньями и губками для захвата изделий, ведущим звеном которых является выходное звено передаточного механизма, и привод, отличающийся тем, что ведущее звено передаточного механизма выполнено в виде пустотелого стержня, жестко связанного в средней его части с валом привода, выходное звено передаточного механизма выполнено двуплечим и подвижно сопряжено с ведущим звеном по всей длине последнего, на свободном конце каждого из плеч выходного звена смонтированы выходные звенья соответствующего исполнительного механизма с губками для захвата изделий, в теле неподвижного кулачка выполнен замкнутый фигурный паз для взаимодействия с роликом, смонтированным на одном из плеч выходного звена передаточного механизма.
2. Манипулятор по п.1, отличающийся тем, что подвижное сопряжение ведущего и выходного звеньев передаточного механизма выполнено в виде шлицевого соединения, содержащего продольные канавки по длине выходного звена для шлицевых зубьев, выполненных в теле ведущего звена.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224640C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

