Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего подвижное основание, исполнительный механизм с губками для захвата изделий и механизм поворота подвижного основания, и привода (патент 2179505 (РФ), опубл. в БИПМ, 2002, - 5 - прототип). У прототипа подвижное основание и механизм поворота последнего выполняют функцию передаточного механизма.
Основным недостатком прототипа является невысокая производительность и ограниченные технологические возможности в виде неспособности обеспечивать подъемную передачу изделий по прямолинейной траектории. Это определяется структурой кинематической цепи, обеспечивающей лишь поворотные движения губок: поворотное движение вместе с подвижным основанием и поворотное движение относительно упомянутого основания. На практике нередко существует необходимость передачи изделий в условиях, когда позиции "схват" и выдача изделий находятся на разных уровнях, например передача изделий с одного этажа на другой. Такая задача не может быть практически решена с помощью прототипа.
Задачей настоящего изобретения является повышение производительности и расширение технологических возможностей устройства.
Решение поставленной задачи достигается тем, что устройство типа "рука" для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, снабжено, по крайней мере, еще одним исполнительным механизмом с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, выходное звено передаточного механизма выполнено в виде гибкой связи, при этом последняя содержит несущие элементы для сопряжения с исполнительными механизмами.
Ведущее звено передаточного механизма выполнено в виде входной и ведомой звездочек, а гибкая связь - в виде бесконечной цепи, сопряженной с упомянутыми звездочками.
Комбинированный механизм снабжен раздвижными клиньями для взаимодействия с выходными звеньями исполнительных механизмов, при этом в боковинах клиньев выполнены продольные фигурные пазы.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительных механизмов, при этом закрепление губок выполнено разъемным.
Несущие элементы являются ведущими звеньями исполнительных механизмов, при этом на несущих элементах жестко закреплены пальцы для шарнирной связи с выходными звеньями исполнительных механизмов.
На свободных концах выходных звеньев исполнительных механизмов смонтированы ролики для взаимодействия с продольными фигурными пазами раздвижных клиньев.
Выходные звенья исполнительных механизмов снабжены пружиной для возможности сжатия губок, при этом в сжатом положении губок упомянутые выходные звенья занимают фиксированное положение на пальце.
Несущие элементы выполнены в виде фигурных спаренных пластин, жестко закрепленных на пальцах бесконечной цепи.
Раздвижные клинья жестко закреплены на неподвижных стойках, установленных на границах интервалов рабочего и холостого ходов устройства.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и характером связи между ними, обеспечивающими упрощение конструкции и возможность движения изделия по вертикальной прямолинейной траектории.
Выполнение выходного звена передаточного механизма в виде гибкой связи и оснащение его несущими элементами обеспечивает следующие преимущества устройства: упрощение конструкции, поскольку несущие элементы выполняют функцию ведущих звеньев исполнительных механизмов (уменьшено число подвижных звеньев); возможность значительного повышения производительности, поскольку бесконечная цепь гибкой связи имеет два несущих элемента, а устройство в целом - два исполнительных механизма; возможность перемещения изделий по прямолинейной траектории под любым углом к горизонту, в том числе и по вертикали.
Выполнение ведущего звена передаточного механизма в виде звездочек, а выходного - в виде бесконечной цепи открывает возможность для использования устройства в условиях, когда расстояние между позициями "схват" изделия и выдача изделия оказывается значительным (например, расстояние между этажами здания). Кроме того, значительно упрощается переналадка устройства на другой угол наклона к горизонту.
Раздвижные клинья с продольными фигурными пазами для роликов занимают фиксированное (неподвижное) положение на границах интервалов рабочего и холостого ходов выходных звеньев с губками. Клинья выполнены фигурными: в моменты начала и окончания контакта роликов с продольными пазами клиньев губки занимают сжатое положение. Разжатие и сжатие губок происходит в процессе взаимодействия роликов с пазами клиньев, т.е. при движении роликов в пазах.
Жесткое закрепление губок на выходных звеньях исполнительных механизмов определяется тем, что губки должны имитировать движение выходных звеньев, а выполнение упомянутого закрепления разъемным вызвано тем, что такое соединение обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Выполнение ведущего звена каждого исполнительного механизма в виде несущего элемента, закрепленного на бесконечной цепи, уменьшает число подвижных звеньев (упрощает конструкцию устройства). Палец, жестко закрепленный на несущем элементе, является наиболее простой и надежной деталью шарнирной связи упомянутого элемента с выходными звеньями. Жесткая связь пальца с несущим элементом обеспечивает необходимую точность движения губок. Такое закрепление пальца на несущем элементе предпочтительнее других способов его крепления, главным образом, из-за точности функционирования губок.
Применение роликов на выходных звеньях исполнительных механизмов уменьшает износ рабочих профилей в фигурных пазах раздвижных клиньев и таким образом способствует точности функционирования губок устройства.
Пружины, связывающие выходные звенья исполнительных механизмов, обеспечивают сжатое положение губок в интервале рабочего и холостого ходов устройства. Кроме того, они обеспечивают замыкание (взаимодействие) роликов с профилями фигурных пазов раздвижных клиньев.
Выполнение несущих элементов в виде фигурных спаренных пластин, жестко закрепленных на пальцах цепи, исключает прогибы и перекосы несущего элемента относительно бесконечной цепи. Это исключает возможную неопределенность в движении выходных звеньев и способствует точности функционирования губок.
Раздвижные клинья с продольными пазами для роликов занимают фиксированное (неподвижное) положение на границах интервалов рабочего и холостого ходов устройства. Точность установки клиньев на неподвижных стойках определяет заданную повторяемость взаимодействия роликов выходных звеньев с фигурными пазами клиньев. Этим исключается какая-либо неопределенность в движении губок при повторении рабочих циклов. Иначе говоря, обеспечивается аналогия в движении губок при любом числе рабочих циклов.
На чертеже представлено устройство типа "рука" для передачи изделий, кинематическая схема.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительных механизмов 3 и 4 с губками 5 для захвата изделий, и привод 6.
Передаточный механизм 2 включает ведущее звено, выполненное в виде входной и ведомой звездочек, соответственно 7 и 8, и выходное звено 9, выполненное в виде бесконечной цепи, сопряженной с упомянутыми звездочками. Звено 9 содержит несущие элементы 10 (по числу исполнительных механизмов устройства), выполненные в виде спаренных или сдвоенных фигурных пластин, жестко закрепленных на пальцах 11 цепи. Несущие элементы 10 служат для связи передаточного механизма с исполнительными механизмами 3 и 4.
Каждый исполнительный механизм (3 или 4) содержит ведущее звено, функцию которого выполняет соответствующий несущий элемент 10, и выходные звенья 12 и 13 с губками 5 для захвата изделий.
Комбинированный механизм 1 устройства снабжен раздвижными клиньями 14 и 15, в боковинах которых выполнены продольные фигурные пазы 16 и 17 для взаимодействия с выходными звеньями 12 и 13 исполнительных механизмов.
На каждом несущем элементе 10 жестко закреплен палец 18 для шарнирной связи элемента с выходными звеньями 12 и 13. На свободных концах выходных звеньев смонтированы ролики 19 и 20 для взаимодействия с фигурными пазами 16 и 17 раздвижных клиньев 14 и 15. Клинья жестко закреплены на неподвижных стойках 21 и 22.
Губки 5 для захвата изделий жестко закреплены на выходных звеньях 12 и 13. Жесткое закрепление губок выполнено разъемным для возможности их быстрой смены при переналадке устройства на передачу изделий другой формы. Выходные звенья 12 и 13 каждого исполнительного механизма снабжены пружиной 23 для возможности сжатия губок 5 при рабочем и холостом ходах исполнительного механизма. Форма губок соответствует форме передаваемых изделий. При захвате и переносе изделия обеспечивается жесткое сопряжение губок с изделием по большей части периметра последнего.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 6 звездочки 7 и 8 совершают вращательное движение, которое преобразуется в поступательное движение бесконечной цепи 9, при этом аналогичное движение совершают несущие элементы 10, закрепленные на упомянутой цепи.
В начале рабочего хода (позиция - "схват" изделия) ролики 19 и 20 выходных звеньев 12 и 13 взаимодействуют с фигурными пазами 16 и 17 раздвижного клина 14, в результате чего губки 5 разжимаются, при этом в разжатые губки подается изделие. По окончании взаимодействия роликов с пазами клина пружина 23 обеспечивает поворот выходных звеньев 12 и 13 относительно пальца 18, при этом губки сжимаются, выполняя "схват" изделия.
При рабочем ходе сжатые губки удерживают изделие, переносимое в позицию выдачи. По завершении рабочего хода ролики 19 и 20, взаимодействуя с пазами 16 и 17 раздвижного клина 15, обеспечивают растяжение пружины 23, поворот звеньев 12 и 13 относительно пальца 18 и разжатие губок, которые перестают удерживать изделие, переданное в позицию выдачи. Аналогичным образом работает второй исполнительный механизм.
В интервале движения исполнительного механизма от позиции выдачи изделия до позиции "схват" изделия выполняется движение без изделия, при этом сжатые губки лишь имитируют перенос изделия. Поскольку устройство имеет два исполнительных механизма, оно работает без холостых ходов: при движении одного исполнительного механизма без изделия другой механизм выполняет рабочий ход.
При выполнении выходного звена передаточного механизма в виде гибкой связи (бесконечной цепи), снабженной несущими элементами, используемыми в качестве ведущих звеньев исполнительных механизмов, успешно решается задача повышения производительности и расширения технологических возможностей устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2376130C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод. Устройство снабжено, по крайней мере, еще одним исполнительным механизмом с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий. Выходное звено передаточного механизма выполнено в виде гибкой связи, при этом последняя содержит несущие элементы для сопряжения с исполнительными механизмами. Изобретение позволит повысить производительность и расширить технологические возможности устройства. 8 з. п.ф-лы, 1 ил.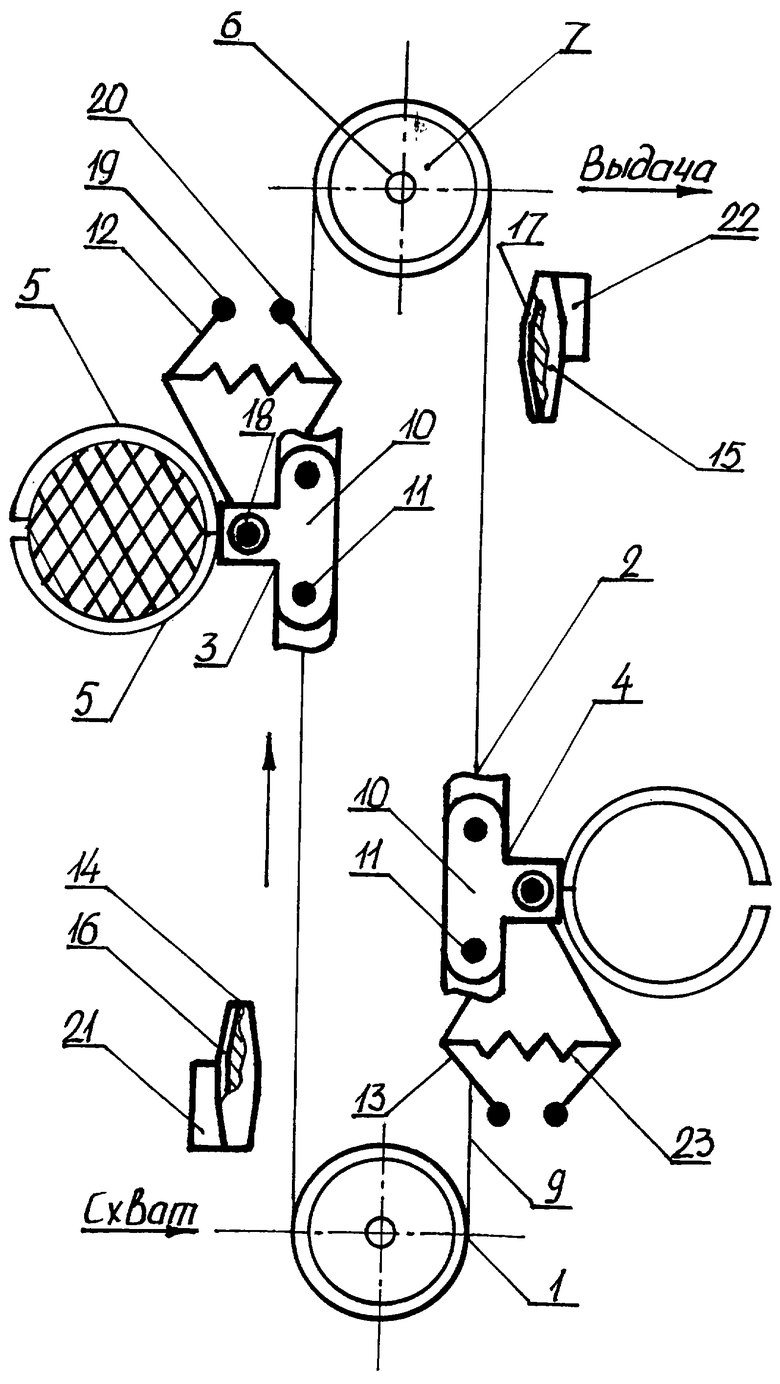
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

