Изобретение относится к системам управления самолетом, а именно к системам полуавтоматического управления траекторными параметрами полета самолета.
В некоторых задачах пилотирования, например при дозаправке в воздухе, требуется обеспечить траекторию полета с выходом в определенную точку пространства при допустимой ошибке менее полуметра. Современные средства бортовых измерений пока недостаточно точны для полной автоматизации подобных задач. А ручное пилотирование в таких режимах даже у высококвалифицированных пилотов связано с большими психофизическими нагрузками. При этом главным источником затруднений, как представляется, является сложность устранения неизбежных мелких отклонений самолета от требуемой траектории. Когда масса самолета более 150 тонн, обычными приемами ручного пилотирования трудно, например, сместить траекторию самолета влево на полметра и при этом сохранить остальные параметры полета неизменными.
Высокая точность выдерживания траекторных параметров требуется также, например, при выполнении захода на посадку на авианосец.
Известна САУ самолетом, которая содержит подсистему управления разворотом и тангажем (1). В такой системе предусмотрены рукоятки управления, поворотом которых летчик определяет режим набора высоты или снижения, а также устанавливает потребный курс полета. После поворота этих рукояток САУ автоматически переводит самолет на заданный угол тангажа или курса и затем стабилизирует эти параметры полета.
Недостатком известных САУ с точки зрения построения на их основе полуавтоматической (оперативно контролируемой пилотом) системы управления является то, что принцип работы, а также конструктивное исполнение и расположение рукояток управления разворотом и тангажем не предполагают их использование в режиме, сходном с ручным пилотированием. Т.е. не предполагается, что летчик, наблюдая все параметры полета, в том числе и внекабинное пространство, будет при помощи этих рукояток постоянно корректировать траекторию полета самолета в соответствии с текущей ситуацией, например, по мере приближения к заправочному конусу самолета-танкера.
Известна полуавтоматическая система аварийного продольного управления (2), которая сформирована на основе оперативно управляемой САУ тангажа и включает в себя расположенный на ручке управления (штурвале) кнюппель триммирования в качестве задатчика добавок, а заданный для блока САУ тангаж формируется суммированием этих добавок и угла тангажа, наблюдаемого летчиком в начальный момент нажатия кнюппеля. Эта полуавтоматическая система управления выбрана в качестве прототипа данного изобретения.
Реализованный в прототипе принцип автоматизации управления тангажем и, по аналогии, курсом позволяет упростить для летчика оперативное управление траекторными параметрами полета (при сохранении скорости полета угол тангажа однозначно связан с углом наклона траектории). Однако точную коррекцию траектории (небольшие смещения в сторону или по вертикали при сохранении направления движения) такая система не обеспечивает.
Задачей предлагаемого изобретения является обеспечение точности и повышение безопасности выполнения на самолетах процедур траекторного управления, в частности, при сближении с самолетом-танкером для дозаправки топливом самолета в воздухе или при заходе на посадку на палубу авианосца и, как следствие, снижение психофизических нагрузок на летчика.
Поставленная задача достигается тем, что в полуавтоматическую систему управления траекторными параметрами полета самолета, содержащую блок формирования заданного курса, в котором имеются блок изменения значений и блок определения ключа сброса в начальные условия, задатчик курса, в качестве которого используется кнюппель триммирования, переключатель и индикатор режимов управления, датчики параметров движения самолета и блок стабилизации заданного курса, в блок изменения значений заданного курса введен блок режима S-образных маневров, содержащий запоминающее устройство, счетчик-интегратор времени нажатия кнюппеля, интегратор времени, прошедшего после выдачи ключа начальных условий, подблоки формирования величины добавки курса и определения интервала выдачи этой добавки, а также устройство сравнения, причем на запоминающее устройство подаются сигнал текущего измеренного угла курса и сигнал от переключателя режимов полуавтоматического управления, при значении этого сигнала «режим=S» прекращается обновление содержимого запоминающего устройства (запоминается исходное значение угла курса), на вход интегратора-счетчика длительности нажатия кнюппеля триммирования подается взятый по модулю сигнал о положении кнюппеля триммирования, а поступление ключа сброса в начальные условия обнуляет счетчик-интегратор, полученный на счетчике-интеграторе сигнал длительности удержания кнюппеля триммирования в отклоненном положении подается на входы подблоков, формирующих сигналы значений добавки заданного курса и интервала времени выдачи добавки курса, сигнал на выходе блока S-образных маневров получается суммированием сигналов с запоминающего устройства и из подблока добавки курса, при поступлении ключа от устройства сравнения сигнал добавки переходит в нулевое значение (заданный курс становится равным исходному), устройство сравнения выдает свой ключ, когда сигнал значения интервала времени выдачи добавки становится меньше сигнала, равного времени после прохождения ключа сброса в начальные условия, этот сигнал времени формируется интегратором времени с единичным входом, поступление ключа сброса в начальные условия обнуляет содержимое интегратора времени, а ключ сброса в начальные условия выдается блоком определения ключа начальных условий в первый момент переключения кнюппеля триммирования из нейтрального положения, а также в момент изменения положения переключателя режимов автоматизированного управления.
Главным отличием предлагаемой полуавтоматической системы коррекции траекторных параметров полета от прототипа является то, что помимо управления траекторными углами она включает в себя режим S-образных маневров. Как и в (2), пилот использует для управления кнюппель триммирования - «на себя-от себя» для вертикальных маневров, «влево-вправо» - для боковых (горизонтальных). Предлагаемая полуавтоматическая система состоит из работающих по одинаковым принципам подсистем управления в вертикальной и в горизонтальной плоскостях.
Переход в режим S-образных маневров для подсистемы управления в горизонтальной плоскости означает запомнить текущий угол курса в начальный момент режима ψini и до нажатия кнюппеля применять его в качестве заданного для САУ курса, а нажатие кнюппеля «влево-вправо» означает:
1. В течение некоторого интервала времени τ после начала маневра принять в качестве заданного для блока САУ угол курса ψtemp=ψini+δ, отличающийся от начального на добавку δ. Величина добавки δ и интервал времени τ определяются временем удержания кнюппеля, знак приращения - направлением нажатия.
2. По истечению интервала времени τ установить для блока САУ заданное значение курса, равное начальному (ψini).
Аналогично, управлением по углу тангажа реализован вертикальный S-образный маневр (при нажатии кнюппеля «на себя-от себя»).
В идеальном случае подбором δ и τ можно обеспечить сколь угодно малое линейное смещение, т.е. высокую точность позиционирования на траектории. Конечно, при реальных характеристиках проводки управления точность будет ограничена. Однако, как показали результаты исследований на имитаторе полетов самолета Бе-200, достижимы минимальные «глубины» S-маневров 0.3÷0.5 м (см. фиг.3). При этом использовалась математическая модель проводки управления, которая учитывает реальные люфты и нечувствительность.
Сущность предлагаемого изобретения поясняется чертежами, где:
- на фиг.1 изображена структурная схема подсистемы управления в горизонтальной плоскости предлагаемой полуавтоматической системы управления;
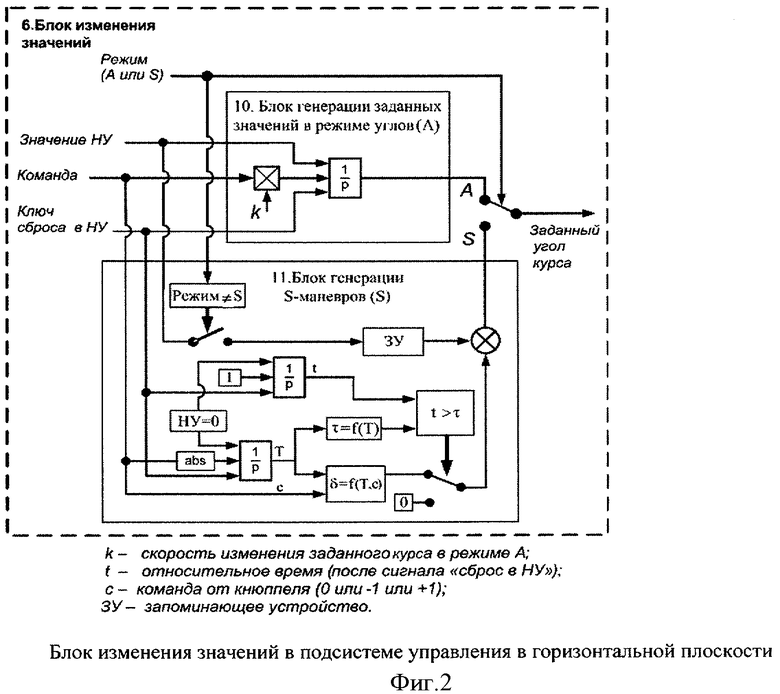
- на фиг.2 показана структурная схема блока изменения значений заданного курса;
- на фиг.3 - полученные математическим моделированием примеры работы системы в режиме S-образных маневров;
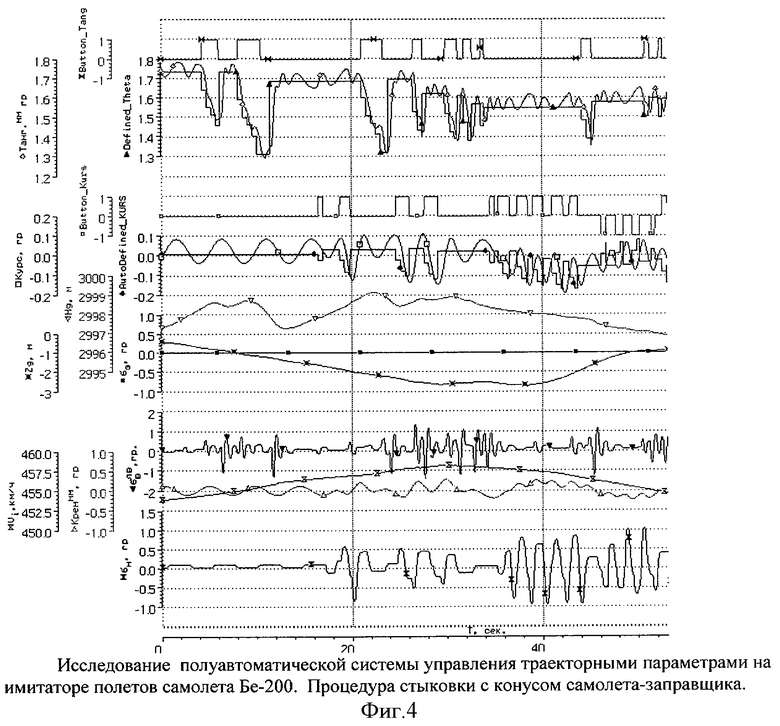
- на фиг.4 - полученный на пилотажном стенде пример использования предлагаемой полуавтоматической системы управления в задаче дозаправки в воздухе (стыковки с конусом самолета-танкера).
Полуавтоматическая система управления траекторными параметрами полета самолета в горизонтальной плоскости (фиг.1) сформирована на основе оперативно управляемой САУ курса и включает в себя расположенный на ручке управления (штурвале) кнюппель триммирования 1, сигнал от которого поступает либо в блок 2 формирования заданного угла курса, либо непосредственно в ЭДСУ 3 самолета (в зависимости от положения переключателя 4 автоматизированных режимов). В блоке 2 сигналы о положении переключателя 4 автоматизированного режима и от кнюппеля 1 поступают в блок 5 определения ключа начальных условий. Выход блока 5 является одним из входов блока 6 изменения значений заданного угла курса. Другими входами блока 6 являются сигнал от кнюппеля 1, измеренный в блоке 7 текущий угол курса, а также ключ выбранного летчиком режима полуавтоматического управления: режим углов (А) или режим S-образных маневров (S). Полученная в блоке 6 величина заданного угла курса поступает в блок 8 стабилизации заданного курса. Туда же поступают параметры движения самолета из блока 7 и текущие углы отклонения рулей. Полученные в блоке 8 заданные углы РН и элеронов поступают в ЭДСУ 3 самолета.
Блок 8 стабилизации курса работает как известные САУ курса, т.е. для достижения заданного угла курса с учетом измеренных блоком 7 текущего угла курса и других параметров движения самолета, а также с учетом текущего положения рулей, блок 7 автоматически определяет заданные углы РН и элеронов. В задаче дозаправки, как показал опыт исследований на пилотажном стенде, для достижения потребной точности коррекции траекторных параметров особенно важно предусмотреть в алгоритме САУ компенсацию нелинейностей исполнительного тракта управления (необходима адекватная реализация малых значений командного сигнала). Также в алгоритме САУ требуется особое внимание устранению кренов после выполнения каждого цикла управления S-образным маневром в горизонтальной плоскости (остаточный крен вызовет уход с траектории даже при точном выдерживании курса).
Для полуавтоматического управления летчик использует расположенный на ручке управления или на штурвале кнюппель триммирования 1, который в зависимости от положения переключателя 4 может работать либо в обычном режиме непосредственного (ручного) управления приводом триммирования, либо в режиме выдачи сигналов-команд 'с' (с=-1, или, 0 или +1) на изменение заданного значения угла курса (режим А) либо на смещение траектории влево (вправо) при сохранении курса (режим S).
В режиме А при наличии ненулевого значения на входе «ключ сброса (КС) в начальные условия (НУ)» значение выхода блока 6 (см. фиг.2) становится равным сигналу, поданному на его вход «значение НУ». На вход «значение НУ» подается текущий курс самолета. В блоке 10 генератор изменения значений заданного курса в режиме А может быть выполнен в виде интегратора (изменение пропорционально времени удержания кнюппеля 1 в отклоненном положении).
В блоке 11 (в режиме S) сигнал от кнюппеля триммирования 1 используется для генерации значений заданного курса, которые обеспечивают выполнение самолетом S-образного маневра в горизонтальной плоскости. В момент включения режима S в запоминающее устройство (ЗУ) записывается текущее значение курса. На интегратор-счетчик в качестве входа подается абсолютная величина abs(c) команды от кнюппеля 1, а в первый момент после нажатия кнюппеля 1 проходит сигнал КС, который обнуляет содержимое интегратора-счетчика, а затем начинается вычисление времени нажатия 'Т'. Аналогично реагирует на КС другой интегратор времени, который вычисляет время 't', которое прошло после начала очередного нажатия кнюппеля 1. На вход последнего подана постоянная величина (единица), и процесс интегрирования не прерывается до прохождения нового сигнала КС.
Заданный курс формируется суммой исходного курса (из ЗУ) и добавки δ=f(T,c). Величина добавки зависит от времени 'Т' и знака 'с' нажатия кнюппеля 1. Добавка 'δ' применяется к заданному курсу в течение интервала времени 'τ', величина этого интервала также определяется в зависимости от времени нажатия кнюппеля 1 τ=f(T). Предполагается, что интервал времени 'τ' может быть больше или равен времени удержания кнюппеля 1 в нажатом положении. Истечение интервала 'τ' определяется сравнением 'τ' с 't'. Когда выполняется условие 't>τ', добавка 'δ' обнуляется и заданный курс равен содержанию ЗУ, т.е. исходному (фактическому курсу самолета в момент включения режима S).
Ключ сброса в НУ определяется в блоке 5 по принципу: КС=1 в момент, когда летчик вывел кнюппель 1 из нейтрального положения, а в остальное время КС=0. Во все время, пока переключатель 4 стоит в положении ручного управления, КС=1, т.е. после включения автоматизированного управления до первого нажатия на кнюппель 1 блок 8 стабилизации будет выдерживать то значение курса, которое было в момент включения. Также сигнал ключа НУ КС=1 устанавливается в моменты переключения режимов автоматизированного управления (из режима А в режим S и обратно).
Полуавтоматическая система управления самолетом в вертикальной плоскости может быть построена аналогично на основе оперативно управляемой САУ тангажа. С точки зрения решаемой задачи (управления траекторией) правильнее было бы использовать вместо тангажа угол наклона траектории. Но тангаж предпочтительней с точки зрения надежности и оперативности измерений, а при условии хорошей стабилизации скорости полета углы наклона траектории и тангажа находятся в прямой зависимости (больше тангаж - больше наклон траектории).
Реализуемость и эффективность предлагаемой полуавтоматической системы управления исследована на имитаторе полетов самолета-амфибии Бе-200. В Процессе экспериментов на математической модели были эмпирически подобраны удовлетворительные параметры блока 11 генерации S-образных маневров, а также приемлемые законы управления для блоков стабилизации курса и тангажа. На фиг.3 показаны примеры полученных на математической модели параметров движения самолета в процессе выполнения команд S-режима полуавтоматического управления.
На имитаторе полетов успешное решение задачи дозаправки в воздухе (стыковки с танкером) обеспечивалось при комбинированном использовании режимов полуавтоматического управления. На значительных (несколько сот метров) удалениях от самолета-танкера применялся режим А, вплоть до надежного совпадения траекторий движения на удалении около 100 метров. На малых удалениях, когда скорости, курсы и наклоны траекторий самолетов были практически уравнены - режим S (вплоть до стыковки).
На фиг.4 показан эксперимент с применением полуавтоматической системы управления в режиме S на заключительной фазе стыковки с заправочным конусом самолета-танкера. Самолет-заправщик летел с курсом 0 на высоте 3 км (конус находился на высоте 2996 м). В этом эксперименте параметры блока генерации S-образных маневров и законы управления для блоков стабилизации курса и тангажа имели более раннюю (менее проработанную) версию, чем на фиг.3. Однако, несмотря на некоторые начальные отклонения от траектории заправщика по курсу и наклону траектории, а также колебания скорости, подход к конусу заправщика выполнен без раскачки самолета. При этом квалификация пилота была невысокой, а опыт выполнения стыковок практически отсутствовал (без автоматизированного управления удачная стыковка была невыполнимой задачей).
Предлагаемая система позволяет летчику оперативно изменять траекторные параметры полета на основе тех же навыков регулирования и практически в том же темпе, как это происходит при ручном управлении. Пилот постоянно присутствует в контуре управления, но его функция упрощена - он задает потребные поправки позиционирования относительно текущей траектории, а необходимые для реализации этих поправок отклонения рулей синтезирует автоматика.
Формула изобретения составлена для канала управления в горизонтальной плоскости.
Источники информации
1. «Бортовые системы управления полетом» под ред. Ю.В.Байбородина, М.: Транспорт, 1975 г, стр.274.
2. «Полуавтоматическая система продольного управления самолетом», патент RU 2316450.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |

Изобретение относится к системам управления самолетом, к системам полуавтоматического управления. Полуавтоматическая система управления траекторными параметрами полета самолета в горизонтальной плоскости сформирована на основе оперативно управляемой системы автоматического управления (САУ) курса. Полуавтоматическая система управления траекторными параметрами полета самолета содержит блок формирования заданного курса, в котором имеются блок изменения значений и блок определения ключа сброса в начальные условия, задатчик курса, в качестве которого используется кнюппель триммирования, переключатель и индикатор режимов управления, датчики параметров движения самолета и блок стабилизации заданного курса. В блок изменения значений заданного курса введен блок режима S-образных маневров, включающий запоминающее устройство, счетчик-интегратор времени нажатия кнюппеля, интегратор времени, прошедшего после выдачи ключа начальных условий, подблоки формирования величины добавки курса и определения интервала выдачи добавки и устройство сравнения. Достигается обеспечение точности и повышение безопасности выполнения на самолетах процедур траекторного управления, при сближении с самолетом-танкером для дозаправки топливом самолета в воздухе или при заходе на посадку на палубу авианосца и снижение психофизических нагрузок на летчика. 4 ил.
Полуавтоматическая система управления траекторными параметрами полета самолета, содержащая блок формирования заданного курса, в котором имеются блок изменения значений и блок определения ключа сброса в начальные условия, задатчик курса, в качестве которого используется кнюппель триммирования, переключатель и индикатор режимов управления, датчики параметров движения самолета и блок стабилизации заданного курса, отличающаяся тем, что в блок изменения значений заданного курса введен блок режима S-маневров, содержащий запоминающее устройство, счетчик-интегратор времени нажатия кнюппеля, интегратор времени, прошедшего после выдачи ключа начальных условий, подблоки формирования величины добавки курса и определения интервала выдачи этой добавки, а также устройство сравнения, при этом на запоминающее устройство подаются сигнал текущего измеренного угла курса и сигнал от переключателя режимов полуавтоматического управления, при значении этого сигнала «режим=S» прекращается обновление содержимого запоминающего устройства (запоминается исходное значение угла курса), на вход интегратора-счетчика длительности нажатия кнюппеля триммирования подается взятый по модулю сигнал о положении кнюппеля триммирования, а поступление ключа сброса в начальные условия обнуляет счетчик-интегратор, полученный на счетчике-интеграторе сигнал длительности удержания кнюппеля триммирования в отклоненном положении подается на входы подблоков, формирующих сигналы значений добавки заданного курса и интервала времени выдачи добавки курса, сигнал на выходе блока S-маневров получается суммированием сигналов с запоминающего устройства и из подблока добавки курса, при поступлении ключа от устройства сравнения сигнал добавки переходит в нулевое значение (заданный курс становится равным исходному), устройство сравнения выдает свой ключ, когда сигнал значения интервала времени выдачи добавки становится меньше сигнала, равного времени после прохождения ключа сброса в начальные условия, этот сигнал времени формируется интегратором времени с единичным входом, поступление ключа сброса в начальные условия обнуляет содержимое интегратора времени, а ключ сброса в начальные условия выдается блоком определения ключа начальных условий в первый момент переключения кнюппеля триммирования из нейтрального положения, а также в момент изменения положения переключателя режимов автоматизированного управления.
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| БАЙБОРДИН Ю.В | |||
| Бортовые системы управления полетом | |||
| - М.: "Транспорт", 1975, с.274 | |||
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1990 |
|
SU1775981A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОЙ ПЛОСКОСТИ НА ЭТАПЕ ВЫРАВНИВАНИЯ | 1980 |
|
SU946111A2 |
| US 6577938 B1, 10.06.2003 | |||
| US 4471439 A, 11.09.1984. | |||

