ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу слежения за радиочастотным сигналом с помощью электронного устройства, содержащего приемное средство, на которое упомянутый радиочастотный сигнал передается от передающего средства в полосе частот на одной или более частотах, при этом слежение за упомянутыми радиочастотными сигналами инициализируется путем настройки упомянутого приемного средства на упомянутую полосу частот. Изобретение также относится к электронному устройству, содержащему приемное средство, предназначенное для приема радиочастотных сигналов, путем настройки упомянутого приемного средства на полосу частот, устройство измерения ускорения и процессор. Кроме того, изобретение относится к компьютерному программному продукту, содержащему средство компьютерного программного кода, для обеспечения выполнения процессором способа согласно изобретению.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Общеизвестно, что на частоту и длину волны электромагнитного поля влияет относительное перемещение. Это явление известно как доплеровский эффект. Если передатчик и приемник электромагнитных сигналов перемещаются относительно друг друга, доплеровский эффект может вызывать изменения частот и длин волн принимаемых сигналов. Поэтому приемник, настроенный на частоту передатчика, может терять настройку из-за смещения частоты, вызванного доплеровским эффектом. Это обычно вызывает проблему только тогда, когда относительное перемещение передатчика и приемника достаточно быстрое. Передатчик может быть неподвижным, например установленным на земле, или движущимся, например установленным на движущемся по орбите спутнике. Однако скорость спутника обычно изменяется относительно медленно, так что смещение частоты сигнала, переданного со спутника из-за доплеровского эффекта, в сущности, является постоянным. В отличие от этого, например, на самолетах, автомобилях или высокоскоростных поездах приемник, следящий за сигналами передатчика, работающего на частоте или в полосе частот, то есть настроенный на них, из-за больших скоростей или высоких ускорений приемника может из-за доплеровского эффекта терять слежение за частотой передатчика. Это недостаток для пользователя приемника, поскольку восстановление слежения за передатчиком или перенастройка приемника на частоту передатчика могут потребовать относительно большого времени и/или потребления мощности.
В US 5703597 предлагается в ответ на изменения ускорения сопровождаемого транспортного средства регулировать ширину полосы пропускания контура фазовой автоподстройки частоты в приемнике сигналов Глобальной системы определения местоположения (GPS). Ускорение транспортного средства вычисляется из принимаемых сигналов GPS. Ширина полосы пропускания контура фазовой автоподстройки частоты увеличивается, когда обнаруживается высокое ускорение, и уменьшается для низких значений ускорения. Хотя такие регулировки должны улучшать способность приемника поддерживать слежение за спутниками во время ускорения, расширенная полоса пропускания также увеличивает шумы, поступающие в приемник. Это также ведет к пониженной чувствительности и/или к увеличению времен интегрирования.
В US 6397146 предложен другой способ и устройство для компенсации ускорения в приемнике сигналов GPS. Значения одной или более составляющих ускорения могут быть получены от акселерометра, испытывающего то же самое ускорение, что и приемник сигналов GPS. Принятый сигнал спутника переносится в полосу промежуточных частот приемника сигналов GPS с помощью ряда операций преобразования частоты, при которых сигнал спутника смешивается с подмешиваемыми сигналами, имеющими частоты, которые могут аппроксимироваться функциями одной или более составляющих ускорения и одним или более параметрами, независимыми от ускорения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, цель настоящего изобретения состоит в создании улучшенного способа слежения за сигналами, передаваемыми передатчиком, предотвращающего необходимость восстановления слежения или перенастройки приемника из-за относительного движения приемника и передатчика.
Эта цель достигается тем, что способ вышеописанного типа дополнительно содержит этапы контроля ускорения электронного устройства посредством устройства измерения ускорения в электронном устройстве и изменения полосы частот, на которую настроено приемное средство, на основе упомянутого контролируемого ускорения. Изменение полосы частот, на которую настроено упомянутое приемное средство, в способе, соответствующем изобретению, соответствует умножению на некоторый коэффициент частот, входящих в полосу частот. Таким образом, изменение полосы частот, на которую настроено приемное средство, может выполняться простым путем. Коэффициент может определяться эмпирически или может быть вычисляемым.
Таким образом, электронное устройство, содержащее приемное средство, может компенсировать доплеровское смещение частоты принимаемого радиочастотного сигнала, вызванное относительным перемещением или изменениями относительного движения между приемным средством и передающим средством. Как правило, когда качество сигнала плохое, приемник может быть выполнен с возможностью решения этой проблемы путем сужения допуска по частоте (ширины полосы пропускания) и/или путем увеличения времени обработки сигнала. Первый путь дает меньше данных для обработки, а второй путь позволяет иметь больше времени для обработки принятых данных. В любом случае, приемник значительно более чувствителен к быстрым изменениям относительного движения между приемным средством и передающим средством. Использование устройства измерения ускорения для контроля ускорения приемного средства и изменение полосы частот, на которую приемное средство настраивается на этой основе, особенно ценно для компенсации этой повышенной чувствительности в условиях плохого качества сигнала. Следует отметить, что термин "ускорение" должен также включать в себя случай нулевого ускорения. Аналогично, изменение полосы частот, на которую настроен упомянутый приемник, может быть нулевым; например, если ускорение, в сущности, является нулевым или ниже определенного порога, изменение полосы частот может быть определено так, что полоса частот, на которую настроено приемное средство, в сущности, не изменится.
Предпочтительно, чтобы упомянутый коэффициент был коэффициентом доплеровского смещения. Этот коэффициент может вычисляться известным способом, например, как функция относительной скорости между приемным средством и передающим средством или как функция скорости приемного средства. Если скорость электронного устройства нулевая, то коэффициент доплеровского смещения равен единице. Если приемник приближается к передатчику, то частота передаваемого сигнала, воспринимаемая приемником, увеличивается по сравнению со случаем приема переданного сигнала неподвижным приемником и, следовательно, коэффициент доплеровского смещения будет больше 1. Аналогично, если приемник удаляется от передатчика, коэффициент доплеровского смещения будет меньше 1 (но больше 0).
Предпочтительно, способ дополнительно содержит этап определения изменения принимаемых частот в упомянутой полосе частот, обусловленного ускорением электронного устройства, контролируемого упомянутым устройством измерения ускорения, причем этап изменения полосы частот, на которую настроено упомянутое приемное средство, выполняется только в случае, если упомянутое изменение превышает заранее установленный порог. Тем самым, приемное средство перестраивается только в случае, когда скорость или ускорение электронного устройства требуют перестройки, чтобы избежать потери слежения за передающим средством. Порог может быть выражен как процент от частоты или как абсолютное значение частоты.
Предпочтительно, способ, соответствующий изобретению, характеризуется тем, что приемное средство электронного устройства выполнено с возможностью приема сигналов в диапазоне ультравысоких частот (UHF). Диапазон UHF является частью радиочастотного диапазона, представляющей особый интерес для определенных целей, например для спутниковых систем определения местоположения.
Способ, соответствующий изобретению, особенно выгоден, когда приемное средство электронного устройства предназначено для приема от спутников сигналов для определения местоположения, например от спутников в спутниковой системе определения местоположения, такой как система GPS (Глобальная система определения местоположения), GLONASS (Глобальная навигационная орбитальная спутниковая система), GNSS (Глобальная навигационная спутниковая система)/"Галилей" или любые другие существующие или будущие спутниковые навигационные системы. Как правило, такие сигналы для определения местоположения от спутниковых навигационных систем посылаются со спутников, находящихся на орбите вокруг Земли. Кроме того, хотя пример осуществления изобретения описан со ссылкой на спутники системы GPS, следует принять во внимание, что сказанное применимо к системам для определения местоположения, которые используют псевдолиты или комбинацию спутников и псевдолитов. Псевдолиты являются наземными передатчиками, которые транслируют сигнал, подобный традиционному сигналу GPS, передаваемому спутниками, полученный модуляцией сигнала несущей L-диапазона, обычно синхронизованный во времени с системой GPS. Псевдолиты могут быть полезны в ситуациях, когда сигналы GPS от орбитальных спутников GPS могут быть недоступны, например в туннелях, шахтах, зданиях или закрытых зонах, или для внесения поправок в сигналы для определения местоположения, как это делается в системе DGPS (дифференциальная система GPS). Термин "спутник", как он используется здесь, предполагает включение псевдолитов или эквивалентов псевдолитов, а термин "GPS", как он используется здесь, предполагает включение сигналов, подобных GPS-сигналам от псевдолитов или эквивалентов псевдолитов. Понятно, что сигналы для определения местоположения, принимаемые со спутников, должны обрабатываться в электронном устройстве предпочтительно посредством процессора или подобного устройства.
Также полезно, если способ, соответствующий изобретению, содержит определение ускорения электронного устройства с помощью принимаемых сигналов для определения местоположения и калибровку измерений упомянутого устройства измерения ускорения с помощью определенного ускорения. Тем самым, простым путем реализуется калибровка устройства измерения ускорения.
В предпочтительном варианте осуществлении способа, соответствующего изобретению, способ дополнительно содержит этап определения ускорения электронного устройства посредством сигналов для определения местоположения, принимаемых приемным средством; причем упомянутое изменение упомянутой полосы частот, на которую настроено приемное средство, выполняется на основе упомянутого ускорения, определяемого посредством принятых сигналов для определения местоположения, и упомянутого ускорения, контролируемого посредством упомянутого устройства измерения ускорения. В случаях, когда контролируемое ускорение отличается от определенного ускорения, упомянутое ускорение может выполняться на основе либо определенного, либо контролируемого ускорения. Одним из примеров такого случая может быть случай, когда приемное средство принимает обновленные данные времени, например, от сети мобильной связи, которые могут указывать изменение в местоположении электронного устройства, тем самым, представляя изменение определенного ускорения. Таким образом, электронное оборудование может идентифицировать, действительно ли имело место ускорение электронного устройства, и электронное устройство может установить изменение полосы частот, на которую соответственно настраивается приемное средство.
Помимо этого, изобретение относится к электронному устройству, содержащему приемное средство, предназначенное для приема радиочастотных сигналов путем настройки упомянутого приемного средства на полосу частот, устройство измерения ускорения и процессор, при этом устройство измерения ускорения выполнено с возможностью контроля ускорение электронного устройства, а процессор выполнен с возможностью изменения полосы частот, на которую настроено упомянутое приемное средство, на основе упомянутого контролируемого ускорения. Изменение полосы частот, на которую настроено упомянутое приемное средство, соответствует умножению на некоторый коэффициент частот, входящих в полосу частот. Тем самым, изменение полосы частот, на которую настроено приемное средство, может выполняться простым путем. Коэффициент может определяться эмпирически или может вычисляться. Тем самым, электронное устройство, содержащее приемное средство, может компенсировать доплеровское смещение частоты принятого радиочастотного сигнала, вызванное относительным перемещением или изменениями относительного движения между приемным средством и передающим средством.
Предпочтительно, упомянутый коэффициент является коэффициентом доплеровского смещения. Этот коэффициент может вычисляться известным способом, например, как функция относительной скорости приемного средства и передающего средства или как функция скорости приемного средства. Если скорость электронного устройства равна нулю, коэффициент доплеровского смещения равен единице. Если приемник приближается к передатчику, то частота переданного сигнала, воспринимаемая приемником, увеличивается по сравнению с приемом переданного сигнала неподвижным приемником и, следовательно, коэффициент доплеровского смещения будет больше 1. Аналогично, если приемник движется, удаляясь от передатчика, коэффициент доплеровского смещения будет меньше 1 (но больше 0).
Предпочтительно, процессор электронного устройства выполнен с возможностью определения изменения принятых частот в упомянутой полосе частот, вызванного ускорением электронного устройства, контролируемым упомянутым устройством измерения ускорения, и выполнения изменения полосы частот, на которую настроено упомянутое приемное средство, только если упомянутое изменение превышает заранее установленный порог. Тем самым, приемное средство электронного устройства перенастраивается только тогда, когда скорость или ускорение электронного устройства требует перестройки, чтобы избежать потери слежения за передающим средством. Порог может быть выражен как процент от значения частоты или как абсолютное значение.
Предпочтительным образом приемное средство в электронном устройстве выполнено с возможностью приема сигналов в диапазоне UHF, являющемся частью радиочастотного диапазона, представляющей особый интерес для определенных целей, например, в спутниковых системах для определения местоположения.
В соответствии с вариантом осуществления электронного устройства, соответствующего изобретению, приемное средство электронного устройства выполнено с возможностью приема сигналов для определения местоположения от спутников. Предпочтительно, приемное средство электронного устройства выбирается из следующей группы: приемник GPS, приемник GLONASS, приемник GNSS/"Галилей" (здесь и далее термин "приемник GPS" считается включающим в себя любые приемники из приведенного выше перечня). В переносных приемниках GPS, как хорошо известно, для контроля любого ускорения приемника GPS используется встроенное средство измерения ускорения. Оно используется для определения местоположения приемника GPS в случаях, когда не может быть получено достаточно сигналов со спутников GPS, например в городах с высокими зданиями, в горных районах и т.д. Однако проблема этих приемников GPS со встроенным средством измерения ускорения состоит в том, что слежение за сигналами спутника GPS может быть потеряно из-за вызванного ускорением доплеровского смещения частоты сигналов, принимаемых от спутников GPS. Таким образом, вышеупомянутый вариант осуществления изобретения решает эту проблему потери сигналов спутника GPS в приемнике GPS, вызванной ускорением. Как правило, приемник GPS выполнен с возможностью одновременного приема сигналов от множества спутников для определения местоположения по различным так называемым каналам, возможно, на разных частотах. Таким образом, электронное устройство, соответствующее изобретению, может быть выполнено с возможностью изменения частоты каждого такого канала, в сущности, одновременно.
В предпочтительном варианте осуществления изобретения электронное устройство выполнено с возможностью определения его ускорения посредством принятых сигналов для определения местоположения и выполнено с возможностью калибровки упомянутого устройства измерения ускорения на основе упомянутого ускорения, определенного посредством упомянутых принятых сигналов для определения местоположения. Тем самым, простым путем реализуется калибровка устройства измерения ускорения.
В дальнейшем предпочтительном варианте осуществления изобретения электронное устройство дополнительно содержит средство для определения ускорения электронного устройства посредством сигналов для определения местоположения, принятых приемным средством, и средство для выполнения упомянутого изменения упомянутой полосы частот на основе упомянутого ускорения, определенного с помощью принятых сигналов для определения местоположения, и упомянутого ускорения, контролируемого посредством упомянутого устройства измерения ускорения. В случаях, когда упомянутое контролируемое ускорение отличается от упомянутого определенного ускорения, упомянутое изменение может выполняться на основе либо упомянутого определенного ускорения, либо упомянутого контролируемого ускорения. Одним из вариантов этого может быть случай, когда приемное средство принимает обновленные данные времени, например, от сети мобильной связи, которые могут указывать изменение местоположения электронного устройства, таким образом, представляя изменение определенного ускорения. Таким образом, электронное устройство может идентифицировать, действительно ли имело место ускорение электронного устройства, и электронное устройство может установить изменение полосы частот, на которую соответственно настраивается приемное средство.
В еще одном предпочтительном варианте осуществления изобретения электронное устройство содержится в мобильном телефоне. Тем самым, реализуется мобильный телефон с улучшенными функциями.
Следует отметить, что электронное устройство может являться электронным устройством, устройством или аппаратурой, которые устанавливаются на транспортном средстве, таком как самолет, автомобиль, корабль и т.д., или переносным/портативным, таким как переносной приемник GPS или мобильная станция, такая как мобильный радиотерминал, мобильный телефон, пейджер, коммуникатор (например, электронные органайзеры, смарт-телефоны и т.д.), содержащие приемник GPS. Электронное устройство и компьютерный программный продукт имеют те же самые преимущества, что и способ, описанный выше, по тем же самым причинам. Более того, следует отметить, что если приемное средство может настраиваться на более чем одну полосу частот, то есть настраиваться на более чем один канал одновременно, то возможно, но не обязательно, что способ может осуществляться для каждой полосы частот/канала.
Повсеместно в этом описании и формуле изобретения термин "настройка", как предполагается, должен охватывать операцию настройки приемника на частоту или полосу частот, а термин "слежение", как предполагается, должен указывать на фактический прием сигнала на желаемой частоте или в полосе частот. Устройство измерения ускорения может быть акселерометром, датчиком перегрузок или любым другим средством, посредством которого ускорение может быть точно определено. Термин "полоса частот", как предполагается, должен охватывать полосу смежных частот, а также одну конкретную частоту. Термин "контролируемое ускорение", как предполагается, является синонимом выражения "ускорение, определяемое устройством измерения ускорения электронного устройства", термин "определенное ускорение", как предполагается, является синонимом ускорения электронного устройства, определяемого посредством сигналов для определения местоположения, принимаемых приемным средством электронного устройства.
Следует подчеркнуть, что термин "содержат/содержит", когда он используется в данном описании, должен указывать на присутствие заявленных признаков, чисел, этапов или компонент, но не препятствует присутствию или добавлению одного или более других признаков, чисел, этапов, компонент или их групп.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже изобретение описано более подробно в связи с предпочтительными вариантами осуществления и со ссылкой на чертежи, в которых представлено следующее:
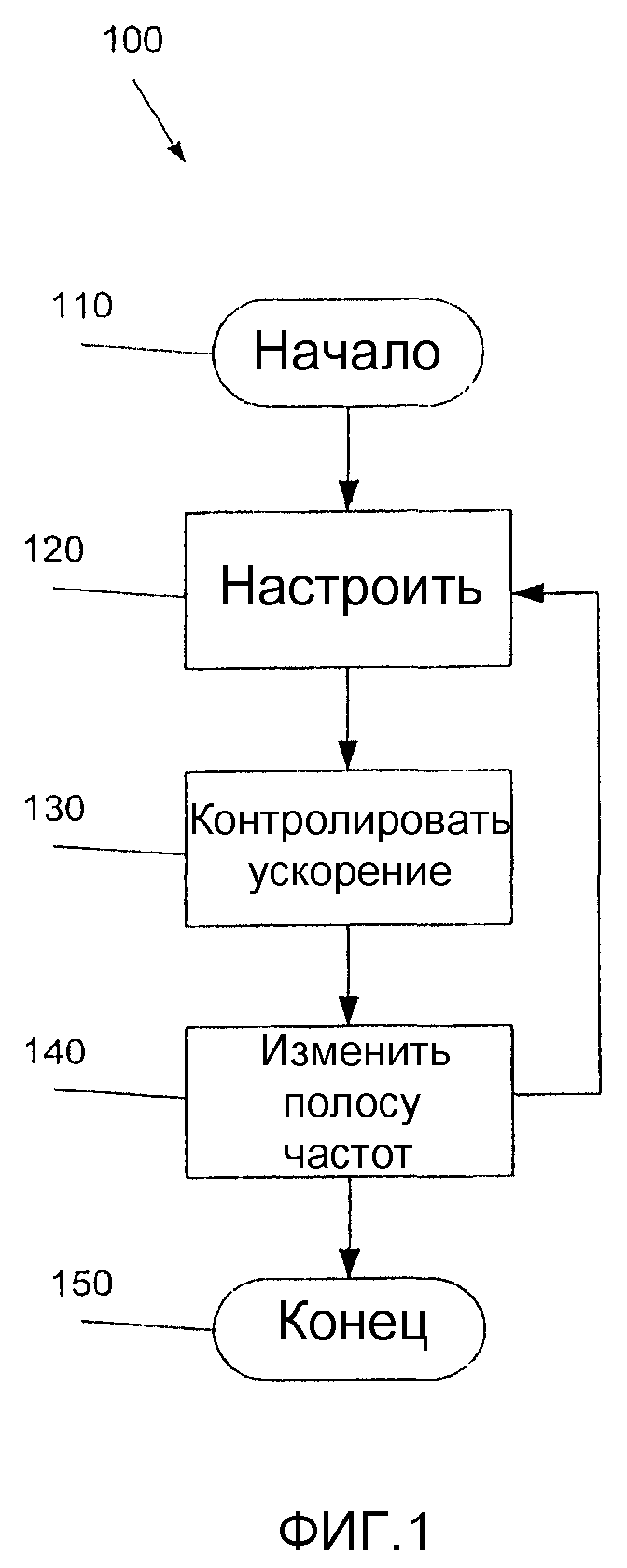
Фиг.1 - блок-схема способа, соответствующего варианту осуществления изобретения,
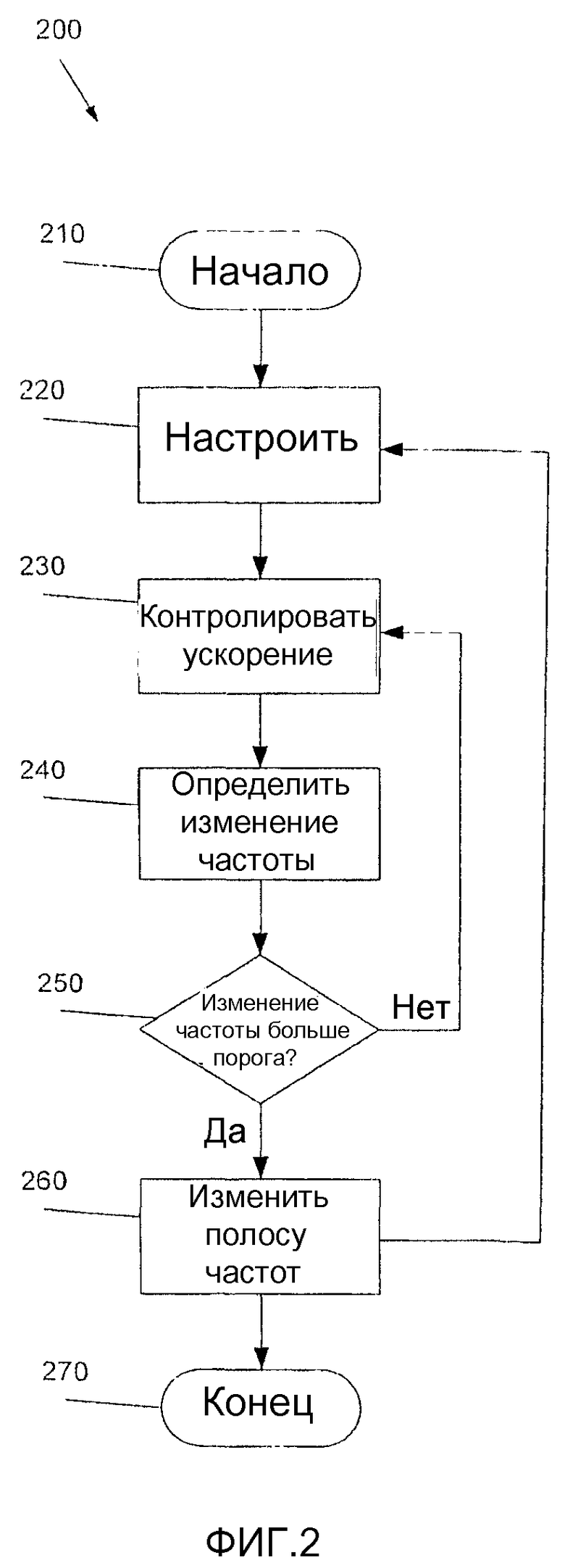
Фиг.2 - блок-схема альтернативного способа, соответствующего другому варианту осуществления изобретения, и
Фиг.3 - блок-схема приведенного для примера электронного устройства, предназначенного для выполнения способа изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.1 показывает блок-схему способа 100, соответствующего варианту осуществления изобретения. Способ начинается на этапе 110. На этапе 120 приемник настроен на определенную частоту или полосу частот, которая возможно, но не обязательно, может быть заданной. Таким образом, способ 100 может применяться для слежения за сигналами на заранее определенной частоте и/или для поиска сигнала в полосе частот и захвата той частоты, на которой передаются полезные сигналы.
Упомянутая частота может быть любой частотой радиочастотного диапазона, то есть от примерно 105 до примерно 1011 Гц. Примерами частот могут быть сигналы ЧМ-радиовещания на частотах между 88 и 108 МГц, сигналы АМ-радиовещания на частотах между 535 и 1700 кГц или сигналы GPS, передаваемые на частотах приблизительно 1227 МГц и приблизительно 1575 МГц. Как правило, этот этап 120 способа 100 выполняется первоначально только один раз или несколько раз до тех пор, пока не начнется слежение за сигналом на желаемой частоте; после этого этап 120 будет выполняться всякий раз только тогда, когда изменяется частота или полоса частот, на которую настроен приемник.
Способ 100 продолжается на этапе 130, где устройство измерения ускорения, которое соединено или связано с приемником, контролирует любое ускорение приемника. Результат этого контроля ускорения приемника передается для вычисления возможного вызываемого доплеровского смещения. Теоретически, такое доплеровское смещение частоты принятого сигнала будет происходить всякий раз, когда приемник движется; однако доплеровское смещение будет влиять на воспринимаемую частоту принятого сигнала только при скоростях приемника, превышающих некоторую скорость. Тем не менее, такие скорости могут испытываться на борту самолетов, высокоскоростных поездах и в быстродвижущихся автомобилях. Предпочтительным образом, этап 130 выполняется непрерывно или с весьма короткими временными прерываниями, так что любое ускорение приемника воспринимается и учитывается.
На этапе 140 способа 100 полоса частот, на которую настроен приемник, изменяется в соответствии с испытываемым доплеровским смещением принимаемой частоты или полосы частот. Это изменение предпочтительно соответствует коэффициенту, умноженному на частоту/частоты, на которую настроен приемник, так что приемник настраивается на измененную частоту, чтобы отслеживать полезный сигнал, передаваемый на определенной частоте. Если приемник приближается к передатчику, частота переданного сигнала, поступающего на приемник, увеличивается по сравнению с приемом переданного сигнала на неподвижном приемнике и поэтому упомянутый коэффициент больше 1. Соответственно, упомянутый коэффициент меньше 1, если приемник удаляется от передатчика. Коэффициент является коэффициентом доплеровского смещения, вычисленным в соответствии с известной теорией, например теорией относительности.
Вслед за изменением полосы частот на этапе 140, этап 120 способа 100 повторяется, чтобы поддерживать слежение за полезным сигналом, затем этапы 130 и 140 выполняются снова, предпочтительно до тех пор, пока приемник включен или пока возможно перемещение приемника. Таким образом, способ 100 может представлять собой функциональную возможность или прикладную программу электронного устройства, содержащего приемник, причем указанная функциональная возможность может включаться или выключаться в соответствии с потребностями пользователя. Однако всякий раз, когда предполагается, что приемник перемещается, использование способа 100 будет экономить энергию и время, поскольку приемник будет продолжать слежение за сигналами, передаваемыми на определенной частоте, даже если доплеровское смещение влияет на частоту, на которой может отслеживаться сигнал, так что можно избежать расхода энергии и времени на повторный захват передатчика на слежение. Способ 100 заканчивается на этапе 150 в типовом случае всякий раз, когда приемник или функциональная возможность приемника, выполняющая способ, выключается.
Фиг.2 показывает блок-схему альтернативного способа 200, соответствующую другому варианту осуществления изобретения. Некоторые этапы способа 200 эквивалентны некоторым этапам способа 100, описанным выше. Эти этапы описаны лишь вкратце.
Способ 200 начинается с этапа 210. На этапе 220 приемник настраивается на определенную частоту или полосу частот, которая возможно, но не обязательно, может быть определена заранее. Таким образом, способ 200 может применяться для слежения за сигналами на предварительно определенной частоте и/или для поиска сигналов в полосе частот и захвата частоты, на которой передаются полезные сигналы. Упомянутая частота может быть любой частотой в радиочастотном диапазоне. Как правило, этот этап 220 способа 200 первоначально выполняется один раз или несколько раз до тех пор, пока сигнал на желаемой частоте не будет захвачен для слежения; после этого этап 220 будет выполняться всякий раз только при изменении частоты или полосы частот, на которую настроен приемник.
Способ 200 продолжается на этапе 230, где устройство измерения ускорения, которое соединено или связано с приемником, контролирует любое ускорение приемника, как описано выше со ссылкой на фиг.1. Предпочтительным образом, этап 130 выполняется непрерывно или с весьма короткими временными прерываниями, так чтобы любое ускорение приемника воспринималось и учитывалось.
На этапе 240 способа 200 определяется любое изменение частоты сигнала, передаваемого передатчиком, на которую настроен приемник, происходящее из-за ускорения или скорости приемника. На этапе 250 изменение частоты, определенное на этапе 240, сравнивается с порогом. Если изменение частоты равно или превышает упомянутый порог, процедура обработки сигнала по способу 200 продолжается на этапе 260; в противном случае процедура сигнала возвращается обратно к этапу 230. На этапе 260 полоса частот, на которую настроен приемник, изменяется в соответствии с воспринимаемым доплеровским смещением принимаемой частоты или полосы частот таким же образом, как описано для этапа 140 способа 100.
Вслед за изменением полосы частот на этапе 260, этап 220 способа 200 повторяется, чтобы поддерживать слежение за полезным сигналом и затем процедура продолжается на последующих этапах, предпочтительно, пока приемник включен или пока возможно перемещение приемника. Таким образом, способ 200 может представлять собой функциональную возможность или прикладную программу электронного устройства, содержащего приемник, причем указанная функциональная возможность может включаться или выключаться в соответствии с потребностями пользователя. Однако всякий раз, когда ожидается, что приемник может двигаться, использование способа 200 будет экономить энергию и время, потому что приемник продолжает слежение за сигналами, передаваемыми на определенной частоте, даже когда доплеровское смещение влияет на частоту, на которой возможно слежение за сигналом, так что можно избежать потери времени и энергии на повторный захват для слежения за передатчиком. Способ 100 заканчивается на этапе 270 в типовом случае всякий раз, когда приемник или функциональная возможность приемника, выполняющая способ, выключается.
Фиг.3 показывает схему примера электронного устройства 10, обеспечивающего выполнение способа соответствующего изобретению. Электронное устройство 10 содержит приемник GPS 20, процессор 30, акселерометр 40 и индикатор 50. Хотя в настоящем описании используется приемник GPS, мог бы использоваться любой приемник сигналов для определения местоположения навигационных спутниковых систем, таких как GLONASS, GNSS/"Галилей" или любых других существующих или будущих навигационных спутниковых систем. Электронное устройство 10 может быть любым электронным устройством, устройством или аппаратурой, которые могут быть установлены на транспортном средстве типа самолета, автомобиля, корабля и т.д., или переносным/портативным типа переносного приемника GPS или мобильной станции типа терминала мобильной радиостанции, мобильного телефона, пейджера, коммуникатора (например, электронные органайзеры, смарт-телефоны и т.д.), содержащих приемник GPS. Фиг.3 показывает только те элементы электронного устройства 10, которые необходимы для описания изобретения.
Приемник GPS обеспечивает прием сигналов GPS от спутников системы GPS. Сигналы спутников GPS гражданского назначения обычно передаются на частоте 1575,42 МГц, поэтому приемник настроен на эту частоту для приема сигналов GPS. Однако приемник GPS может быть настроен на любую другую частоту, на которой передаются сигналы GPS.
Обычный сигнал GPS включает три различных вида информации: псевдослучайный код, данные эфемерид и данные альманаха. Псевдослучайный код является идентификационным кодом, идентифицирующим спутник, передающий сигнал. Данные эфемерид, которые постоянно передаются каждым спутником в системе GPS, содержат информацию о состоянии спутника и текущих дате и времени. Эта часть сигнала существенно необходима для определения местоположения приемника. Наконец, данные альманаха содержат информацию, где должен находиться каждый спутник GPS в любое время в течение дня. Каждый спутник передает данные альманаха, показывающие орбитальную информацию для этого спутника и для каждого другого спутника в системе.
Блок 30 электронного устройства 10 представляет собой процессор. Некоторые из функций процессора 30 показаны в блоках 32, 34, 36 и 38. В блоке 32 принятый сигнал GPS обрабатывается для извлечения данных различных типов, описанных выше.
Поскольку данные альманаха в сигналах GPS содержат информацию об орбитах спутников в системе GPS, процессор 30 использует в блоке 34 обработанные сигналы GPS для захвата спутников, от которых он принимает передаваемые сигналы GPS. Таким образом, слежение, выполняемое в блоке 34, используется в блоке 32, что, в свою очередь, влияет на фактический прием сигналов GPS в приемнике GPS 20. Обработанные сигналы GPS и выполняемое слежение за ними используются в блоке 36 для вычисления местоположения электронного устройства 10. Когда приемником GPS получены сигналы от трех или более спутников, местоположение приемника GPS может быть определено с высокой точностью, обычно в пределах 5-15 метров. Когда положение электронного устройства 10 определено, процессор 30 может вычислять другую информацию, такую как скорость, ускорение, пеленг, пройденное расстояния и т.д. Положение, вычисленное в блоке 36, может отображаться на индикаторе 50 электронного устройства 10 в виде широты и долготы или адреса или на карте.
Электронное устройство 10, кроме того, содержит акселерометр 40, предпочтительно трехосевой акселерометр. Хорошо известно, как использовать акселерометр 40 для соответствия вычислению местоположения, выполняемому в блоке 36, в случаях, когда приему сигналов GPS создаются препятствия, например плотной листвой или городскими застройками с высокими зданиями. Это подробно описано ниже в связи с фильтром Калмана 38. Таким образом, когда приемник GPS 20 не может принимать достаточные сигналы для выполнения точного вычисления положения, информация акселерометра 40 может использоваться для вычисления изменения в местоположении электронного устройства 10. Согласно изобретению, результаты измерения акселерометра 40 могут также использоваться для слежения, выполняемого в блоке 34, так чтобы традиционный способ слежения мог быть дополнен способом 100 или 200, описанным выше, чтобы учесть любое изменение частоты/частот, на которых могут приниматься сигналы GPS. Наконец, акселерометр 40 может быть откалиброван посредством определения местоположения, скорости и/или ускорения электронного устройства 10 на основе принятых сигналов GPS, что указано стрелкой от блока 34 к акселерометру 40 на фиг.3.
Блок 38 указывает подход к выполнению слежения и вычислению местоположения, описанных выше, а именно с помощью фильтра Калмана. Фильтр Калмана является набором математических уравнений, а именно алгоритмом оптимальной рекурсивной обработки данных. Фильтр Калмана поддерживает оценки прошлого, настоящего и будущего состояний системы. Фильтр Калмана 38 имеет внутренние переменные, которые соответствуют положению по трем координатам, скорости по трем координатам и ускорению по трем координатам.
При традиционном решении измерения положения на основе сигналов GPS, где в фильтр Калмана вводится только положение по трем координатам, фильтр Калмана вырабатывает решения для скорости и ускорения. После этого фильтр Калмана интегрирует значения по скорости и ускорению для получения сглаженного решения в зависимости от времени.
В фильтре Калмана 38 электронного устройства 10 на фиг.3 информация в отношении одного из указанных выше значений, то есть значения ускорения, может дополняться дополнительной информацией от акселерометра 40. В таком случае, дополнительная информация от акселерометра 40 может продолжать обработку фильтра Калмана даже при отсутствии входных сигналов от системы GPS. Переменные ускорения могут изменяться следующим образом:
Aх=Ах,старое∗(1-λ)+λ∗ах
Ay=Аy,старое∗(1-λ)+λ∗аy
Az=Аz,старое∗(1-λ)+λ∗аz
где Aх, Ay, Az соответственно обозначают ускорение по координатным осям x, y и z оси евклидовой системы координат; Ах,старое, Аy,старое, Аz,старое соответственно обозначают старые значения ускорения по координатным осям x, y и z; ах, аy и аz соответственно ускорение по координатным осям x, y и z, измеренное посредством акселерометра, и λ является коэффициентом, который может быть между 0 и 1.
Как описано выше, одной из выгод изобретения является то, что данные акселерометров могут использоваться в качестве входных сигналов для метода слежения, чтобы улучшить надежность и ширину полосы (определяется допуском на сдвиг частоты) в способе слежения. Увеличенной шириной полосы слежения можно, в конечном счете, если нужно, пожертвовать для увеличения чувствительности по сигналу.
Ниже со ссылкой на фиг.3 описан пример, где электронное устройство содержит приемное средство, предназначенное для приема сигналов для определения местоположения от спутников, например приемник GPS 20, содержащийся в мобильных телефонах. Электронное устройство также содержит часы (не показаны), определяющие точку начала отсчета времени электронного устройства, когда точка начала отсчета времени используется, помимо прочего, при обработке сигналов GPS в блоке 32. Если электронное устройство 10 содержится в мобильном телефоне, то настройки информации о синхронизации и/или информации о частоте электронного устройства могут передаваться на электронное устройство по сети мобильной связи, например, в качестве обновления опорного времени и/или опорной частоты.
Такая настройка может вызывать обновление положения электронного устройства 10, поскольку положение электронного устройства, определяемое с помощью сигналов GPS, зависит от времени приема сигналов, и, таким образом, может указываться изменение его скорости и ускорения. Однако так как электронное устройство 10 содержит акселерометр 40, такие настройки скорости/ускорения могут сравниваться с контролируемым ускорением электронного устройства, получаемым с акселерометра. Таким образом, электронное устройство способно различать два случая, то есть случай, когда обновление временной информации, получаемой по сети мобильной связи, вызывает расчетное изменение положения, и/или скорости, и/или ускорения электронного устройства 10, и случай, когда акселерометр контролирует ускорение электронного устройства. Это выгодно, поскольку слежение за спутниками в каждом из случаев испытывает разное влияние, как объясняется далее, но до сего времени эти два случая не различались друг от друга.
В первом случае обновление опорного времени или опорной частоты электронного устройства может вызвать в приемнике 20 сигнала GPS потерю слежения за всеми спутниками. Если, однако, акселерометр 40 указывает, что никакие специальные или внезапные изменения условий или изменения движения электронного устройства 10 не произошли, может быть определено, что электронное устройство 10 подверглось изменению опорной частоты или точки начала отсчета времени за счет обновления. В этом случае можно весьма обоснованно предположить, что сигналы от всех спутников изменились на неизвестную, но равную величину. Таким образом, повторный захват спутников на слежение может быть оптимизирован путем настройки каналов, по которым принимаются сигналы от спутников, на наиболее вероятные изменения частоты. Например, частота первого канала может быть смещена вверх на 30 Гц, второго канала - вниз на 30 Гц, частота третьего канал может быть смещена вверх на 60 Гц, и т.д. Тем самым, вероятно, что приемник быстро установит слежение за спутником по, как минимум, одному каналу, и соответствующее смещение частоты идентифицируется. Поскольку это идентифицированное смещение частоты должно быть одним и тем же для всех каналов (в том случае, когда приемник не испытывал существенного ускорения), остальные спутники могут повторно захватываться для слежения приемником GPS 20 посредством настройки частот, на которые настроены каналы приемника GPS 20, на идентифицированное смещение частоты.
Таким образом, время и энергия, затраченные на повторный захват спутников на слежение, могут быть существенно уменьшены. В последнем из этих двух случаев, когда смещение частоты вызвано доплеровским эффектом, может использоваться изменение полосы частот, как описано ранее.
Приведенный выше пример мог бы получить дальнейшее развитие путем поддержания слежения за ускорениями во время описанного повторного захвата для слежения, то есть в интервале с момента, когда приемное средство теряет слежение за спутниками, и до того момента, когда первый канал не будет повторно захвачен для слежения, и компенсации имевшего место ускорения повторным захватом для слежения остальных каналов и, таким образом, соответствующего изменения принимаемой частоты из-за доплеровского эффекта. Кроме того, повторный захват для слежения каналов приемного средства 20 может включать учет доплеровского эффекта из-за движения спутников путем использования информации, содержащей в данных эфемерид.
Следует отметить, что приведенный выше пример является лишь примером и что могли бы использоваться любые другие подходящие многоканальные устройства слежения, отличные от приемника сигналов GPS, такие как любая мобильная станция, содержащая средства связи.
Изобретение относится к способу слежения за радиочастотным сигналом и сохранения настройки приемника на передатчик, даже когда приемник движется с относительно высокой скоростью, и устройству для его реализации. Достигаемый технический результат - предотвращение необходимости восстановления слежения или перенастройки приемника из-за относительного движения приемника и передатчика. Реализующее способ электронное устройство, предназначенное для приема радиочастотных сигналов, передаваемых в полосе частот, содержит приемное средство, выполненное с возможностью настройки на полосу передаваемых частот, устройство измерения ускорения, выполненное с возможностью контроля ускорения электронного устройства, и процессор, выполненный с возможностью изменения полосы частот, на которую настроено приемное средство, путем умножения частот в полосе частот на коэффициент, рассчитанный по упомянутому контролируемому ускорению. 2 н. и 14 з.п. ф-лы, 3 ил.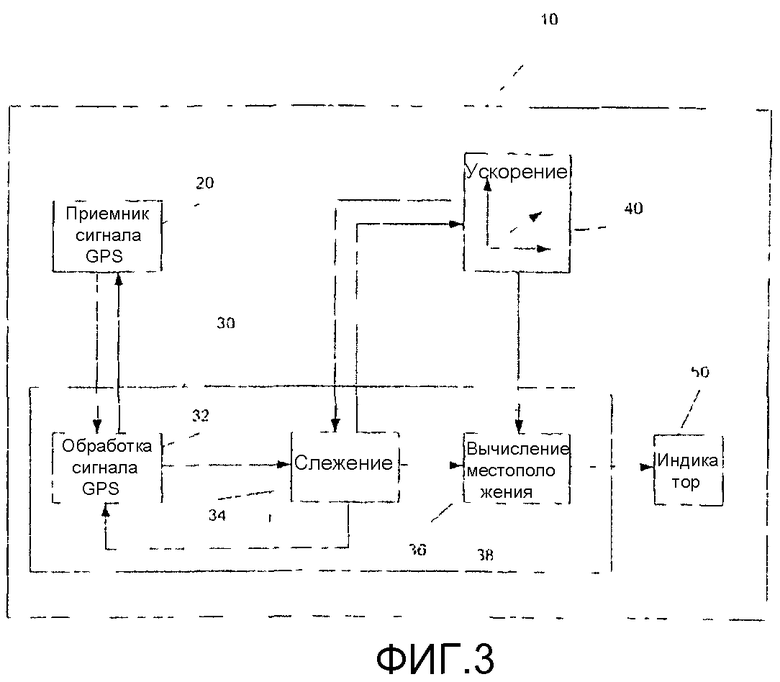
1. Способ слежения за радиочастотным сигналом с помощью электронного устройства, содержащего приемное средство, в котором упомянутый радиочастотный сигнал передается передающим средством в полосе частот с одной или более частотами, при этом способ содержит следующие этапы, на которых: инициализируют слежение за упомянутыми радиочастотными сигналами путем настройки упомянутого приемного средства на упомянутую полосу передаваемых частот;
контролируют (130; 230) ускорение электронного устройства с помощью устройства измерения ускорения в электронном устройстве; и изменяют (140; 260) полосу частот, на которую настроено упомянутое приемное средство, на основе упомянутого контролируемого ускорения, отличающийся тем, что этап изменения полосы частот, на которую настроено приемное средство, содержит умножение частот, в полосе частот, на коэффициент, вычисленный из упомянутого контролируемого ускорения.
2. Способ по п.1, отличающийся тем, что упомянутый коэффициент является коэффициентом доплеровского смещения.
3. Способ по п.1 или 2, отличающийся тем, что способ дополнительно содержит этап, на котором: определяют (240) изменение принимаемых частот в упомянутой полосе частот за счет ускорения электронного устройства, контролируемого упомянутым устройством измерения ускорения, и выполняют этап изменения полосы частот, на которую настроено упомянутое приемное средство, только если упомянутое изменение превышает заранее установленный порог.
4. Способ по п.1 или 2, отличающийся тем, что приемное средство электронного устройства выполнено с возможностью приема сигналов в полосе ультравысоких частот.
5. Способ по п.1 или 2, отличающийся тем, что приемное средство электронного устройства выполнено с возможностью приема сигналов от спутников для определения местоположения.
6. Способ по п.5, дополнительно содержащий этапы, на которых:
определяют ускорение электронного устройства посредством принятых сигналов для определения местоположения, и калибруют измерения упомянутого устройства измерения ускорения с помощью ускорения, определенного посредством упомянутых принятых сигналов для определения местоположения.
7. Способ по п.5, отличающийся тем, что дополнительно содержит этап, на котором: определяют ускорение электронного устройства с помощью сигналов для определения положения, принятых приемным средством;
причем упомянутое изменение полосы частот, на которую настроено приемное средство, выполняют на основе упомянутого ускорения, определенного по принятым сигналам для определения местоположения, и упомянутого ускорения, контролируемого с помощью упомянутого устройства измерения ускорения.
8. Электронное устройство (10), предназначенное для приема радиочастотных сигналов, передаваемых в полосе частот, содержащее:
приемное средство (20), выполненное с возможностью настройки на упомянутую полосу передаваемых частот; устройство измерения ускорения (40), выполненное с возможностью контроля ускорения электронного устройства (10); и процессор (30), выполненный с возможностью изменения полосы частот, на которую настроено упомянутое приемное средство (20), на основе упомянутого контролируемого ускорения, отличающееся тем, что процессор выполнен с возможностью изменения полосы частот, на которую настроено приемное средство (20), путем умножения частот, в полосе частот, на коэффициент, рассчитываемый по упомянутому контролируемому ускорению.
9. Электронное устройство (10) по п.8, отличающееся тем, что упомянутый коэффициент является коэффициентом доплеровского смещения.
10. Электронное устройство по п.8 или 9, отличающееся тем, что упомянутый процессор (30) выполнен с возможностью определения изменения принимаемых частот в упомянутой полосе частот из-за ускорения электронного устройства (10), контролируемого упомянутым устройством измерения ускорения (40), и выполнения изменения полосы частот, на которую настроено приемное средство (20), только если упомянутое изменение превышает заранее установленный порог.
11. Электронное устройство (10) по п.8 или 9, отличающееся тем, что приемное средство (20) электронного устройства (10) выполнено с возможностью приема сигналов в полосе ультравысоких частот.
12. Электронное устройство (10) по п.8 или 9, отличающееся тем, что приемное средство (20) электронного устройства (10) выполнено с возможностью приема от спутников сигналов для определения местоположения.
13. Электронное устройство (10) по п.12, отличающееся тем, что приемное средство (20) электронного устройства выбрано из следующей группы: приемник GPS, приемник GLONASS, приемник GNSS/Galileo.
14. Электронное устройство (10) по п.12, отличающееся тем, что оно дополнительно содержит: средство для определения ускорения электронного устройства с помощью сигналов для определения местоположения, принимаемых приемным средством; и средство для выполнения упомянутого изменения полосы частот на основе упомянутого ускорения, определенного с помощью принятых сигналов для определения местоположения, и упомянутого ускорения, контролируемого упомянутым устройством измерения ускорения.
15. Электронное устройство (10) по п.12, отличающееся тем, что это электронное устройство (10) выполнено с возможностью определения его ускорения с помощью принятых сигналов для определения местоположения, и что оно выполнено с возможностью калибровки упомянутого устройства измерения ускорения на основе упомянутого ускорения, определенного с помощью упомянутых принятых сигналов для определения местоположения.
16. Электронное устройство (10) по п.8, отличающееся тем, что электронное устройство содержится в мобильном телефоне.
| US 5703597 А, 30.12.1997 | |||
| ПРИЕМОИНДИКАТОР | 1990 |
|
SU1814387A1 |
| US 6397146 B1, 28.05.2002 | |||
| УСТРОЙСТВО СОПРЯЖЕНИЯ ОТСЧЕТОВ МНОГОКАНАЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ УГОЛ—ФАЗА—КОД | 0 |
|
SU292182A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

