Предлагаемое изобретение относится к измерительной технике и может быть использовано для определения дальности и скорости или только скорости удаленного объекта, в частности для обнаружения и фиксации нарушений правил дорожного движения транспортным средством.
Известен способ определения дальности и/или скорости удаленного объекта [1], включающий многократное зондирование объекта путем периодической посылки на него серии n лазерных импульсов и определения в каждом i-м зондировании временного интервала ti между моментами излучения лазерного импульса и приема отраженного объектом излучения, определении и регистрации при каждом зондировании значений моментов текущего времени Ti, в которые производят посылки лазерных импульсов, и измеренных интервалов и ti в серии n зондирований, и определении скорости объекта V путем определения дальностей до объекта при каждом зондировании Ri=с·ti/2, где с - скорость света, и линейной интерполяции значений Ri, например, по формуле:
 .
.
Согласно описанному способу, дальность до объекта определяют по формуле:  .
.
Указанная процедура не обеспечивает минимальной среднеквадратической ошибки определения скорости и дальности. Кроме того, не обеспечивается синхронность определения дальности и скорости объекта.
Наиболее близким по технической сущности к предлагаемому способу является способ определения дальности и/или скорости удаленного объекта, согласно которому производят многократное зондирование объекта путем периодической посылки на него серии n лазерных импульсов, в каждом i-м зондировании определяют задержку ti между моментами излучения лазерного импульса и приема отраженного объектом излучения, и определяют текущую дальность до объекта по формуле Ri=сti/2, где с - скорость света; при этом зондирования производят с постоянной частотой без пауз, а результаты зондирований делят на две равные группы: в первой группе определяют среднее значение дальности
 ,
,
во второй группе определяют среднее значение дальности
и определяют скорость объекта V пo формуле V=(R2-R1)/T1/2, где Т1/2 - период времени между первой и второй группами серии зондирования.
Согласно описанному способу для повышения достоверности измерений сравнивают результаты измерений Ri между собой и, если какой-либо результат отличается от предыдущего более чем на 10 м, то измерение считают недействительным, полученные результаты аннулируют и измерение начинают сначала. Как указано в [2], в случае превышения объектом (автомобилем) допустимой скорости к серии измерений из n=800 зондирований добавляют третью группу n/2 зондирований, по ним определяют среднее значение дальности
и повторно определяют скорость объекта по формуле V'=(R3-R2)/T2/3, где Т2/3 - период времени между второй и третьей группами серии зондирования. Сравнивают значения V и V' и, в случае их совпадения с заданной точностью, индицируют полученный результат.
Данный способ не обеспечивает минимального количества зондирований на один замер, что приводит к неоправданному снижению срока службы измерителя дальности и скорости и ресурса батареи питания. Кроме того, известный способ не обеспечивает минимальную среднеквадратическую ошибку определения скорости и дальности при минимальном количестве зондирований в серии, особенно при превышении объектом допустимой скорости, и не обеспечивает однозначность временной привязки результата измерения дальности к определенному моменту текущего времени. Этот способ не обеспечивает также возможности проведения измерений за одну серию при наличии ложных замеров.
Задачей изобретения является сбережение ресурса и увеличение срока службы аппаратуры, реализующей способ, а также сокращение энергопотребления при питании аппаратуры от автономного источника, за счет сокращения количества измерений в серии зондирований при минимальной погрешности определения скорости объекта в широком диапазоне скоростей. Задачей изобретения является также определение дальности до объекта с однозначной привязкой по времени. Кроме того, задачей изобретения является обеспечение возможности измерения дальности и/или скорости за одну серию при наличии ложных замеров.
Указанная задача решается за счет того, что в известном способе определения дальности и/или скорости удаленного объекта, включающем многократное зондирование объекта путем посылки на него серии n лазерных импульсов, определения в каждом i-м зондировании задержки ti между моментами излучения лазерного импульса и приема отраженного объектом излучения, определения текущей дальности до объекта по формуле Ri=сti/2, где с - скорость света, и регистрации этих значений дальности, при этом серию зондирований делят на две группы, регистрируют значения времени Ti, в моменты i-го зондирования, в первой группе зондирований производят n1≤n/2 зондирований, осуществляют линейную интерполяцию зарегистрированных в моменты времени Ti значений дальности до объекта Ri, по результатам которой предварительно определяют траекторию объекта R*(t) в виде R*(t)=R0*+V*t, где R0* - оценка дальности до объекта в момент времени T1, соответствующий первому зондированию, V* - оценка скорости объекта, t - текущее время, отсчитываемое от момента первого зондирования, в зависимости от определенной величины скорости V* формируют базовый интервал времени Тб, по окончании которого производят вторую группу зондирований в количестве n2=n-n1, после чего по зарегистрированным в обеих группах зондирований значениям дальности Ri и моментам времени Ti определяют уточненную траекторию объекта R**(t) в виде R**(t)=R0**+V**t, где R0** - уточненная оценка дальности до объекта в момент времени, соответствующий первому зондированию, V** - уточненная оценка скорости объекта, t - текущее время, отсчитываемое от момента первого зондирования.
Для повышения точности можно в процессе регистрации результатов зондирований аннулировать замеры дальности до объекта Ri, результаты которых отличаются от величины предыдущего признанного достоверным замера Ri-l на величину, превышающую предельную погрешность измерения дальности до объекта.
После определения уточненной траектории объекта целесообразно аннулировать замеры дальности до объекта Ri, результаты которых отличаются от уточненной оценки в i-й момент времени R**(Ti) на величину, превышающую предельную погрешность измерения дальности, после чего повторно определяют уточненную оценку траектории объекта по оставшимся признанным достоверными результатам зондирований.
Предварительные и окончательные оценки дальности до объекта R0 в начальный момент измерения Т1 и скорости объекта V можно формировать по формулам:


где
R0 - оценка дальности до объекта в момент времени T1;
V - оценка скорости объекта;
Rim=c·ti/2 - признанный достоверным результат измерения дальности до объекта в i-м зондировании;
Ti - моменты времени, в которые произведены замеры дальности Ri,
с - скорость света,
m - количество признанных достоверными замеров дальности в серии из n зондирований.
ti - задержка между моментами излучения лазерного импульса и приема отраженного объектом излучения в i-м зондировании.
Величину базового интервала можно устанавливать в зависимости от предварительной оценки скорости объекта путем сравнения предварительной оценки скорости объекта с заданной величиной скорости и принятия решения о выборе базового интервала по заранее установленному правилу.
Выбирать базовый интервал можно, например, так, что если предварительная оценка скорости объекта превышает предельно допустимое значение, то устанавливают максимально возможную величину базового интервала Тб, а если не превышает, то устанавливают величину базового интервала от 1,5 до 4 раз меньше предельно возможного.
Величину дальности до объекта R**(Т) в произвольный момент времени Т можно определять по формуле R**(T)=R0**+V**T, где R0** - уточненная оценка дальности в момент первого зондирования, и V** - уточненная оценка скорости, причем время Т отсчитывают от момента первого зондирования.
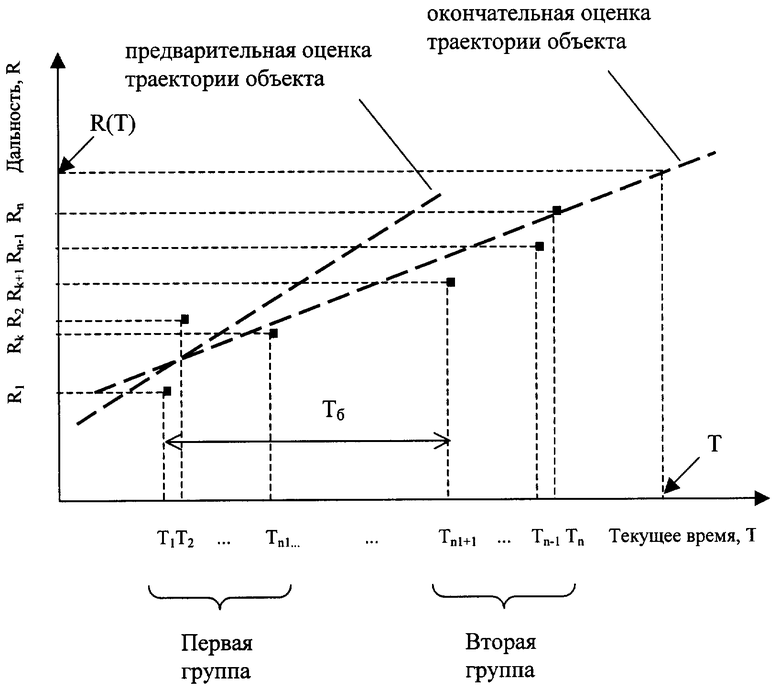
На чертеже показана временная диаграмма, иллюстрирующая описанный способ.
Начиная с момента времени T1, производят группу n1 зондирований, регистрируют моменты Ti, определяют и регистрируют измеренные значения дальности R1…Rn1, производят предварительную оценку траектории объекта путем линейной интерполяции измеренных дальностей, по которым формируют предварительные оценки скорости V* и дальности R0*, например, по указанным выше формулам или по одной из известных упрощенных процедур.
Если определенная таким образом скорость объекта не превышает допустимого значения, то выбирают базу измерения Tб1, если превышает, то выбирают увеличенное значение базы Тб2, формируют соответствующий временной интервал Тб и по его истечении производят вторую группу зондирований, вновь регистрируя измеренные значения дальности Rn1+1…Rn. Соотношение Tб2/Tб1 может выбираться в пределах от 1,5 (меньшая величина этого соотношения мало влияет на конечный результат) до 4 (при большем значении не выполняются требования по точности и времени измерения).
В процессе измерений исключают замеры, отличающиеся от предыдущего значения более чем на предельную погрешность измерения - такие замеры считают недостоверными. По окончании серии зондирований по оставшимся m замерам дальности, признанным достоверными, производят линейную интерполяцию траектории движения объекта, например, по формулам (1) и (2), реализующим метод минимума средних квадратов, обеспечивающий наименьшее значение ошибки определения скорости и дальности. При этом формируют уточненные оценки скорости V** и дальности в начальный момент времени R0**. После этого проверяют имеющиеся результаты зондирования Ri, на соответствие условию |R**(Ti)-Ri|≤ΔR, где ΔR - максимальная погрешность измерения. Результаты Ri, не соответствующие этому условию, аннулируют и по оставшимся m результатам зондирования повторно уточняют оценки скорости V** и дальности в начальный момент времени R0**. Начальный момент времени T1 соответствует моменту первого зондирования независимо от количества и очередности аннулированных замеров дальности.
Величину дальности R**(T) до объекта в произвольный момент времени Т определяют по формуле R**(T)=R0**+V**T, что позволяет осуществить однозначную привязку измерения дальности к определенному моменту времени, например, к времени окончания серии зондирований.
Пример 1.
Согласно предлагаемому способу в первой и второй группах производят по n1=n2=200 зондирований с частотой следования F=2220 1/с. Общее время измерения скорости Тизм принято равным 0,36 с. База измерения Тб=Tизм-n1/F=0,36-200/2220~0,27 с.
При этих условиях среднеквадратическая погрешность измерения скорости при использовании простейшего алгоритма усреднения, принятого в [2],
σV=2σ1/Tб√n1=2σ1/0,27√200,
где σ1 - среднеквадратическая погрешность измерения дальности в одном замере.
При измерении по способу [2] при том же времени измерения Tизм=0,36 с требуется по n10=n20=400 измерений, а база измерений составляет Тб0=Tизм/2=0,18 с. При этом среднеквадратическая погрешность измерения скорости
σV0=2σ1/Tб0√n10=2σ1/0,18√400.
Отношение этих погрешностей σV/σV0=(0,18√400)/(0,27√200)=0,94. Это означает, что при равном времени измерения предлагаемый способ практически не уступает по точности прототипу, а при использовании оптимального алгоритма вычисления скорости (2) - и превосходит его по точности. По количеству же зондирований на одно измерение выигрыш предлагаемого способа составляет два раза.
Пример 2.
В случае превышения некоторого заданного предела скорости объекта согласно известному способу производят дополнительную серию зондирований длительностью 0,18 с и производят вторую оценку скорости на измерительной базе 0,18 с. В результате общее количество зондирований n0=3 n10=1200, и при этом обеспечивается снижение погрешности измерения в √2 раз, т.е. для условий Примера 1 среднеквадратическая погрешность измерения скорости составит
σV0=2σ1(√2Tб0√n10)=2σ1/0,18√400=0,393σ1.
При том же общем количестве зондирований n=1200 и том же времени измерения Тизм=3n/F=1200/2220=0,54 сек процедура измерения по предлагаемому способу
обеспечивает погрешность измерения скорости [3]
 .
.
Выигрыш предлагаемого способа по точности составляет 0,393/0,093=4,2 раза.
Предлагаемое изобретение обеспечивает существенное сбережение ресурса и увеличение срока службы аппаратуры, реализующей способ, а также сокращение энергопотребления при питании аппаратуры от автономного источника, за счет сокращения количества измерений в серии зондирований при минимальной погрешности определения скорости объекта в широком диапазоне скоростей. В частности, способ позволяет:
- при одинаковом количестве зондирований значительно сократить среднеквадратическую ошибку измерения скорости и дальности, уменьшив ее до теоретически минимально возможного значения;
- существенно сократить количество зондирований, необходимое для обеспечения заданной точности;
- сократить время процедуры, необходимое для проведения измерений с заданной точностью;
- однозначно привязывать результат измерения дальности по времени к любому заданному моменту, например, началу, середине или концу серии зондирований, что имеет значение, например, для протоколирования результатов.
Источники информации
1. J.G.Dunne "Laser-based measuring device". US Patent 5359404, Oct. 25, 1994.
2. Ю.В.Абазадзе, Н.А.Лицарев, В.Л.Почтарев и др. «Особенности построения лазерного измерителя скорости и дальности ЛИСД-2М». Квантовая электроника, 2002, Том 32, №3, С.247-250 - прототип.
3. Б.Р.Левин «Теоретические основы статистической радиотехники». Изд. «Радио и связь», Москва, 1975 г., т.2, c.131-139.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И/ИЛИ СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2008 |
|
RU2385471C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |
| Устройство обеспечения безопасности пилотирования в условиях облачности с оценкой возможности посадки на водоем со снежно-ледяным покровом | 2024 |
|
RU2821159C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ИЗМЕРЕНИЯ СКОРОСТИ, ДАЛЬНОСТИ И УГЛОВЫХ КООРДИНАТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2521203C1 |
Изобретение относится к измерительной технике и может быть использовано, в частности, для обнаружения и фиксации нарушений правил дорожного движения транспортным средством. Способ включает многократное зондирование удаленного объекта путем посылки на него серии лазерных импульсов, определения в каждом зондировании задержки между моментами излучения импульса и приема отраженного объектом излучения, аналитического определения текущей дальности до объекта и регистрации этих значений дальности. Серию зондирований с регистрацией значений времени делят на две группы. Для первой группы зондирований осуществляют линейную интерполяцию зарегистрированных значений дальности, по результатам которой предварительно определяют траекторию объекта. В зависимости от определенной величины скорости формируют базовый интервал времени, по окончании которого производят вторую группу зондирований. По зарегистрированным в обеих группах зондирований значениям дальности и моментам времени определяют уточненную траекторию. В процессе регистрации результатов зондирований и после определения уточненной траектории объекта аннулируются замеры дальности до объекта, результаты которых отличаются от величины предыдущего признанного достоверным замера на величину, превышающую предельную погрешность измерения дальности. По оставшимся признанным достоверными результатам повторно определяют уточненную оценку траектории объекта зондирований. Изобретение обеспечивает сбережение ресурса и увеличение срока службы аппаратуры, а также уменьшение энергопотребления за счет сокращения количества измерений в серии зондирований при минимальной погрешности определения скорости объекта в широком диапазоне скоростей. 5 з.п. ф-лы, 1 ил.
1. Способ определения дальности и/или скорости удаленного объекта, включающий многократное зондирование объекта путем посылки на него серии n лазерных импульсов, определения в каждом i-м зондировании задержки ti между моментами излучения лазерного импульса и приема отраженного объектом излучения, определения текущей дальности до объекта по формуле Ri=cti/2, где с - скорость света, и регистрации этих значений дальности, при этом серию зондирований делят на две группы, отличающийся тем, что регистрируют значения времени Тi, в моменты i-го зондирования, в первой группе зондирований производят n1≤n/2 зондирований, осуществляют линейную интерполяцию зарегистрированных в моменты времени Ti, значений дальности до объекта Ri, по результатам которой предварительно определяют траекторию объекта R*(t) в виде R*(t)=R0*+V*t, где R0* - оценка дальности до объекта в момент времени T1, соответствующий первому зондированию, V* - оценка скорости объекта, t - текущее время, отсчитываемое от момента первого зондирования, в зависимости от определенной величины скорости V* формируют базовый интервал времени Tб, по окончании которого производят вторую группу зондирований в количестве n2=n-n1, после чего по зарегистрированным в обеих группах зондирований значениям дальности Ri и моментам времени Ti, определяют уточненную траекторию объекта R**(t) в виде R**(t)=R0**+V**t, где R0** - уточненная оценка дальности до объекта в момент времени, соответствующий первому зондированию, V** - уточненная оценка скорости объекта, при этом предварительные и окончательные параметры интерполирующей траектории R0 и V определяют так, чтобы среднеквадратическое отклонение значений Ri, от интерполирующей зависимости было минимальным, например формируют по формулам
 ,
,
 ,
,
где Rim=c·t/2 - признанный достоверным результат измерения дальности до объекта в i-м зондировании;
m - количество признанных достоверными замеров дальности в серии из n зондирований.
2. Способ по п.1, отличающийся тем, что в процессе регистрации результатов зондирований аннулируют замеры дальности до объекта Ri, результаты которых отличаются от величины предыдущего признанного достоверным замера Ri-1 на величину, превышающую предельную погрешность измерения дальности до объекта.
3. Способ по п.1, отличающийся тем, что после определения уточненной траектории объекта аннулируют замеры дальности до объекта Ri, результаты которых отличаются от уточненной оценки в i-й момент времени R**(Ti) на величину, превышающую предельную погрешность измерения дальности, после чего повторно определяют уточненную оценку траектории объекта по оставшимся признанным достоверными результатам зондирований.
4. Способ по п.1, отличающийся тем, что величину базового интервала Тб устанавливают в зависимости от предварительной оценки скорости объекта путем сравнения предварительной оценки скорости объекта с заданной величиной скорости и принятия решения о выборе базового интервала по заранее установленному правилу.
5. Способ по п.4, отличающийся тем, что если предварительная оценка скорости объекта превышает предельно допустимое значение, то устанавливают максимально возможную величину базового интервала Tб, a если не превышает, то устанавливают величину базового интервала от 1,5 до 4 раз меньше предельно возможного.
6. Способ по п.1, отличающийся тем, что величину дальности до объекта R**(T) в произвольный момент времени Т определяют по формуле R**(T)=R0**+V**T, причем время Т отсчитывают от момента первого зондирования.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| АППАРАТ ДЛЯ СШИВАНИЯ КРОВЕНОСНЫХ СОСУДОВ | 1947 |
|
SU71792A1 |
| Устройство для непрерывного брожения теста и т.п. продуктов | 1946 |
|
SU68741A1 |
| Устройство для измерения дальности и скорости объектов | 1989 |
|
SU1661572A1 |

