t 1
Изобрете1ше относится к робото-- теккике, а именно к конструкции про- мглпленных манипуляторов, работаюиргх в сферической системе координат.
Целью изобретения является упро- .щение конструкц ш.
На фиг. 1 изображен манипулятор,, общий вид; на фиг. 2 - сечение А-А на фир. 1.
Предлагаемый манипулятор состоит из руки 1 со охватом 2, двух групп 3 и 4 линейных двигателей, расположенных в параллельных плоскостях, каждая из которых вклочает расположенные попарно и взаимно перпендикулярно двигатели 5, 6, 7 и 8.
Мелоду концом руки 1 и корпусом 9 расположен допох1Нительнь1й двигатель 10. Каждый из двигателей выполнен в виде трубки из эластв;чного материала образующей петлю, стороны которой скручены между собой, при этом средняя часть петли через шарпргр 11 связана с рукой 1, а ее концы закреплены на корпусе 9. Один конец трубки заглушен, а другой - связан с источником дабления рабочей среды (не показан) .
Предлагаемый маншпулятор работает следующим образом.
При подаче под давлением рабочей среды в. трубку одного из двигателей петля раскручивается,- что приводит к ее удлинению. При снятии давления
362
0
5
0
5
петля возвращается в исходное состояние под действием сил упругости. Взаимное расположение двигателей позволяет руке 1 манипуля1 ора совершать продольное перемещение, с помощью двигателя 10 и вращение вокруг центра групп 3 и 4 при ПОМОЕЩ двигателей, образующих этих группы, что обеспечивает обслтасивание рабочей зоны ма1- ипулятора„
Форм у л а изобретения
Наношулятор, содержащей установленную в корпусе руку со схватом на одном из ее концов и две двигателей линейного перемещения, располоясенньЕ в параллельных плоскостях, калс,цая из которых включает расположенные попарь о и взаимно перпендикулярно двигатели, о т л и ч а - ю щ и и с я темэ что, с целью упро- цения конструкции, он снабжен источником давлеп11я рабочей среды и до- полнительны двигателем линейного перемещения, расположенным между вторым концом руки и корпусом, а каждый двигатель линейного перемещения вьшолнен в виде трубки из эластичного материала, образугаа(ей петлю, стороны которой скручены между собой5 при этом средняя часть петли шарнирно связана с рукой, а ее концы закреплены на корпусе; причем один конец трубки заглушен, а другой связан с источ:ником давления рабочей среды.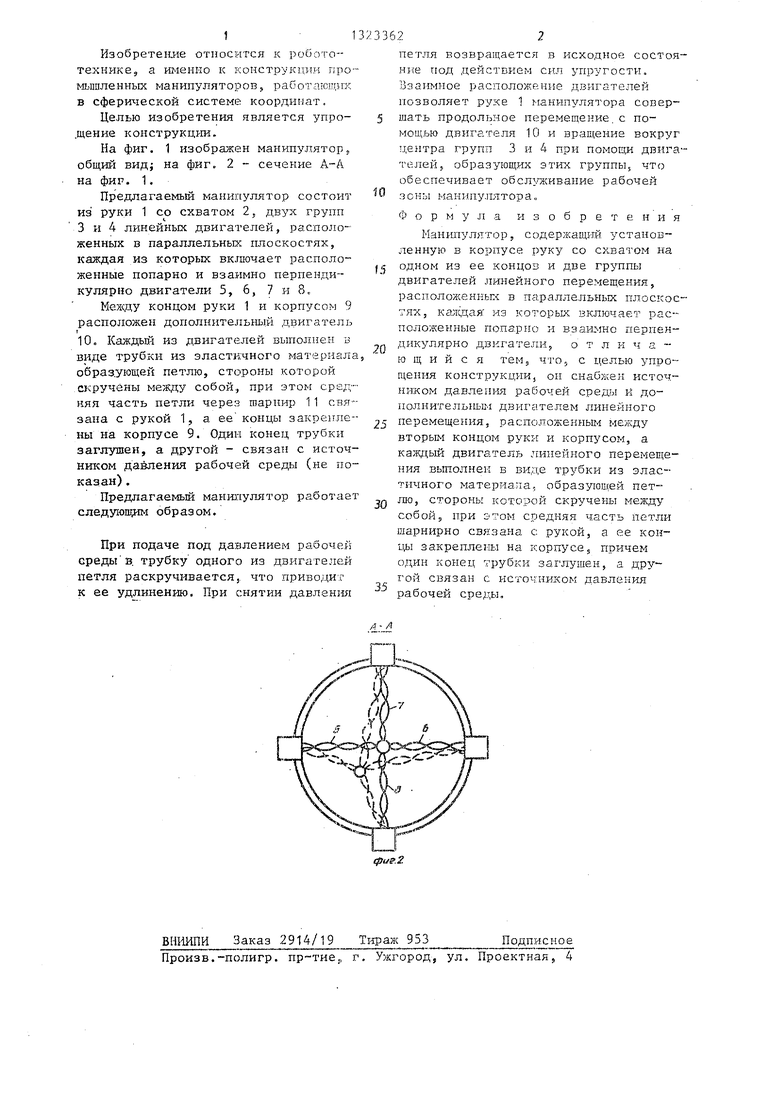
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1269990A1 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ НА АСТЕРОИДЕ С ПОМОЩЬЮ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ | 2014 |
|
RU2586437C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| МАНИПУЛЯТОР-ПЛАТФОРМА | 1995 |
|
RU2093344C1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2592070C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДЛОЖЕК БЕЗ ОБРАЗОВАНИЯ ЧАСТИЦ | 2010 |
|
RU2510546C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
Изобретение относится к робототехнике, а именно к конструкции промышленных манипуляторов, работающих в сферической системе координат. Целью изобретения является упрощение конструкции. Манипулятор содержит две группы 3 и 4 двигателей, расположенных в каждой группе попарно и взаимно перпендикулярно, и дополнительный двигатель 10, установленный между концом руки 1 и корпусом 9. Каждый из двигателей выполнен в виде трубки из эластичного материала,образующего петлю со скрученными между собой сторонами, при этом средняя часть петли шарнирно связана с рукой а ее концы закреплены на корпусе 9. Один конец петли заглушен, а другой связан с источником давления рабочей среды. Подача рабочей среды в трубку приводит к увеличению длины петли, а снятие давления - к возвращению ее в исходное положение под действием сил упругости. Взаимное расположение двигателей позволяет руке совершать продольное перемещение и вращение вокруг центра групп 3 и 4. 2 ил, t § (Л фи&.1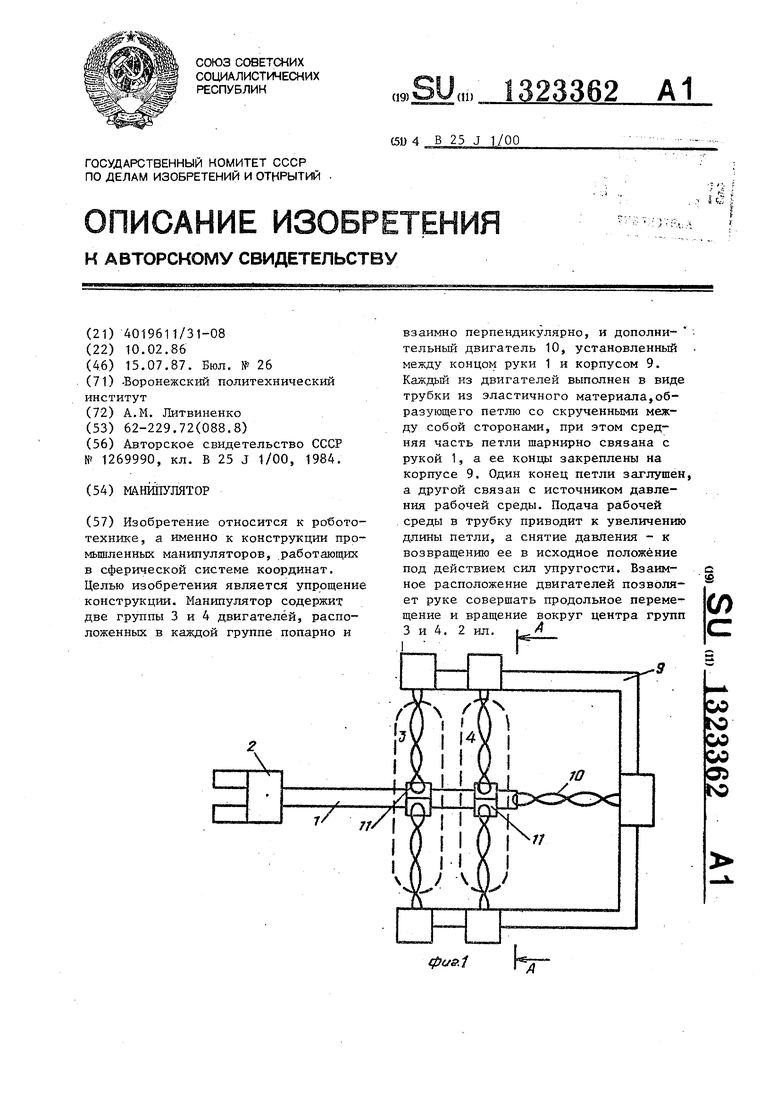
| Манипулятор | 1984 |
|
SU1269990A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
