Изобретение относится к области судовождения - управлению движением корабля по заданному направлению с использованием приемника спутниковой навигационной системы и локатора, определяющего параметры движения цели.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления движением судна» (патент RU 2240953 C1, 27.11.2004). Способ управления направлением движения судна основан на использовании информации от приемника спутниковой навигационной системы, блока заданного значения путевого угла и сумматора, в котором по сигналам текущего путевого угла, заданного путевого угла и угловой скорости судна формируется сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением судна (патент RU 2292289 C1, 27.01.2007, принятый в качестве прототипа), в котором автоматическое управление направлением движения судна осуществляется с использованием: сумматора, рулевого привода, блока датчика руля, приемника спутниковой навигационной системы, задатчика точек поворота судна и блока заданного маршрута. Отличительной особенностью рассматриваемого способа управления движением судна является корректировка заданного значения путевого угла в процессе плавания из точки А в точку Б, затем В… по заданному маршруту.
Использование этого способа гарантирует выход судна в очередную заданную точку изменения направления движения даже при сильном волнении на море. Однако автоматизировать процесс управления кораблем при сближении с подвижной целью с использованием известных способов автоматического управления направлением движения судна нельзя, т.к. в блоке заданного маршрута отсутствует специальный задатчик путевого угла и связанная с ним подсистема формирования параметров движения цели.
Техническим результатом способа автоматического управления сближением корабля с подвижной целью является:
- формирование автоматического управления рулевым приводом при сближении корабля с подвижной целью по прямой «волчьей погони»,
- минимизация времени сближения корабля с подвижной целью,
- определение на будущей траектории движения цели точки стыковки корабля с подвижной целью, позволяющей оптимизировать процесс сближения.
Технический результат достигается тем, что способ управления сближением корабля с подвижной целью использует задатчик путевого угла (ПУзд), приемник спутниковой навигационной системы (СНС), датчик руля, рулевой привод и сумматор, на вход которого вводят сигналы:
- заданного путевого угла - ПУзд - из задатчика путевого угла (ПУзд),
- путевого угла - ПУ - из приемника спутниковой навигационной системы,
- угла перекладки руля (δ) - из датчика руля, сигнал с выхода сумматора вводят на вход рулевого привода, при этом используют блок формирования путевого угла цели (ПУц) и скорости движения цели (Vц), вычислитель коррекции заданного путевого угла (ΔПУзд) и формирователь пеленга (φ) и расстояния до цели (Lк-ц), в котором получают сигнал пеленга от корабля до цели - φк-ц и сигнал расстояния корабль-цель - Lк-ц, на первый вход блока формирования путевого угла цели (ПУц) и скорости движения цели (Vц) вводят сигналы - φк-ц и - Lк-ц из формирователя пеленга (φ) и расстояния до цели (Lк-ц), а на второй вход вводят сигналы широты и долготы корабля из приемника спутниковой навигационной системы, на вход вычислителя коррекции заданного путевого угла (ΔПУзд) вводят сигналы:
- путевого угла цели - ПУц и скорости движения цели - Vц - из блока формирования путевого угла цели (ПУц) и скорости движения цели (Vц),
- скорости корабля - Vк - из приемника спутниковой навигационной системы,
- пеленга от корабля до цели - φк-ц из и блока формирования пеленга (<p) и расстояния до цели (Lк-ц), сигнал коррекции заданного путевого угла - ΔПУзд,
- из вычислителя коррекции заданного путевого угла (ΔПУзд) вводят на вход сумматора.
Технический результат достигается тем, что формируют сигналы для создания способа автоматического управления сближением корабля с подвижной целью:
- коррекции заданного путевого угла (ΔПУзд),
- угла пеленга (азимута) (φк-ц),
- расстояния от корабля до подвижной цели (Lк-ц),
- путевого угла цели (ПУцели),
- скорости движения цели (Vцели),
- скорости движения корабля (Vкор).
Предлагаемый способ управления базируется на применении типового способа автоматического управления движением корабля с использованием:
- приемника спутниковой навигационной системы (СНС),
- задатчика путевого угла,
- сумматора,
- рулевого привода,
- датчика руля.
При формировании закона автоматического управления движением корабля используются сигналы:
- путевого угла (ПУ) и угловой скорости корабля (ω) - из приемника СНС,
- заданного путевого угла (ПУзд) - из задатчика путевого угла,
- угла перекладки руля (δ) - от датчика руля.
Все четыре сигнала вводят на вход сумматора, на выходе которого формируется сигнал управления рулевым приводом при движении по заданному направлению (ПУзд):

где
δзд - заданное значение угла перекладки руля.
Для формирования закона сближения корабля с подвижной целью в способе управления типовой закон управления движением корабля вида (1) дополняется и имеет вид:
где: ПУзд - сигнал заданного путевого угла (последний совпадает по направлению с пеленгом (азимутом) на цель (φк-ц)),
ΔПУзд - сигнал коррекции заданного путевого угла.
Использование закона управления движением корабля вида (1а) при ΔПУзд=0 позволяет осуществить автоматическое управление сближением корабля с целью по кривой «собачьей погони»:

где ПУзд - путевой угол корабля,
φк-ц - угол пеленга (азимута) корабль-цель.
При |ΔПУзд|>0 использование закона управления движением корабля вида (1а), позволяет осуществить сближение корабля с целью по прямой «волчьей погони».
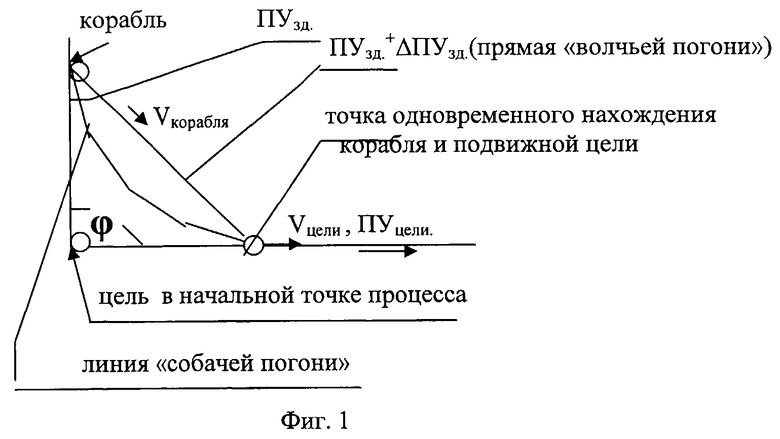
На фиг.1 приведен корабль и подвижная цель с двумя возможными линиями сближения:
- по кривой «собачьей погони» (линия с изломами, касательная к кривой, всегда исходит из центра масс корабля и направлена на текущее положение цели, совпадает с направлением заданного путевого угла (ПУзд), равного углу азимута (φк-ц)),
- по прямой «волчьей погони».
Прямая «волчьей погони» исходит из первоначального положения корабля и пересекает траекторию движения цели в точке будущего одновременного (по времени) нахождения корабля и цели в процессе сближения. Прямая совпадает с направлением движения корабля - путевым углом корабля при сближении ПУкорабля=ПУзд+ΔПУзд.
Для формирования процесса сближения корабля (близкого к минимальному по времени) по прямой «волчьей погони» за подвижной целью следует формировать сигнал (|ΔПУзд|>0). С этой целью используем:
- вычислитель коррекции заданного путевого угла (ΔПУзд),
- формирователь:
а) расстояния между кораблем и подвижной целью (Lк-ц),
б) угла пеленга корабль-цель (φк-ц),
- блок формирования:
а) путевого угла цели (ПУц),
б) скорости движения цели (Vц).
Величина сигнала коррекции путевого угла корабля (ΔПУзд) (для формирования направления движения корабля по прямой при сближении с целью) является функцией двух переменных:

где φц.к - угол пеленга от подвижной цели к кораблю, ΔV=Vкор/Vцель.
В соответствии с зависимостью (3) сигнал коррекции заданного путевого угла (ΔПУзд) формируется в вычислителе с использованием сигналов:
- путевого угла цели (ПУц) и скорости цели (Vц) - из блока формирования путевого угла цели и скорости хода цели,
- скорости корабля (Vк) - из приемника СНС,
- угла пеленга корабль-цель (φк-ц) (совпадающего с направлением путевого угла корабля в первоначальном состоянии схождения (ПУзд).
В вычислителе формируется библиотека набора возможных сигналов коррекции заданного путевого угла Σ(ΔПУзд)i в функции двух переменных: φц-к, ΔV (или набора функций одной переменной ΣΔПУздφi=f(ΔV) для набора областей различных значений угла пеленга подвижная цель-корабль (φцель-корабль). Библиотека с набором сигналов коррекции заданного путевого угла ∑{(ΔПУзд)i=f(φц.к.i, ΔVi)} создается путем моделирования возможных процессов сближения корабля с подвижной целью по прямой «волчьей погони» и вводится в вычислитель. Выбор конкретного сигнала коррекции заданного путевого угла (ΔПУзд)i из библиотеки набора сигналов производят по текущим значениям: φц-к.i, ΔVi перед началом процесса сближения с конкретной подвижной целью. Сигнал коррекции заданного путевого угла (ΔПУзд)i для конкретного данного случая сближения корабля с целью вводят на вход сумматора, на выходе которого формируется закон автоматического управления кораблем в режиме сближения с целью (1а) по прямой «волчьей погони».
Рассмотрим возможный вариант устройства, реализующего предложенный способ сближения корабля с подвижной целью.
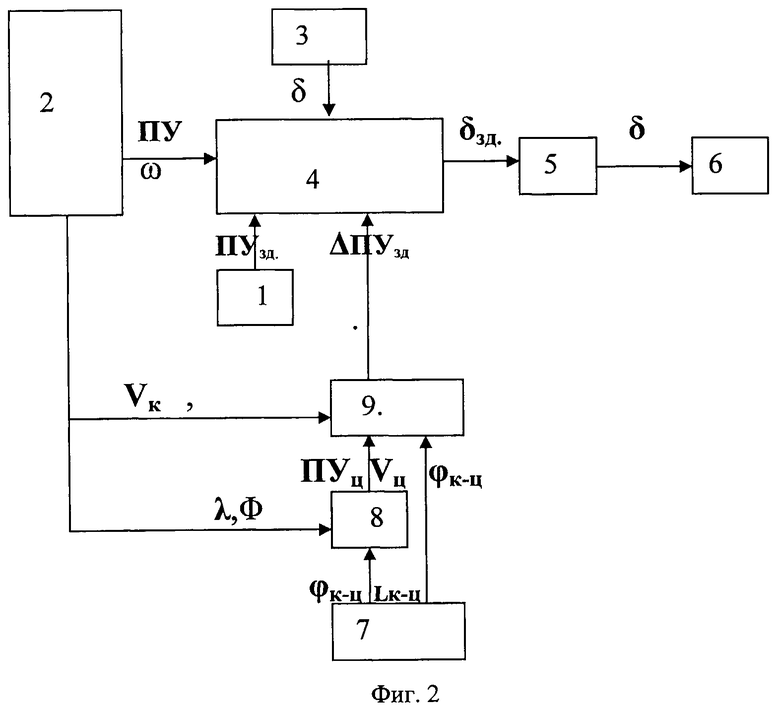
На фиг.2 приведена блок-схема устройства автоматического управления сближением корабля с подвижной целью.
Устройство содержит задатчик 1 путевого угла ПУзд, приемник 2 спутниковой навигационной системы (СНС), датчик 3 руля, сумматор 4, рулевой привод 5, объект управления 6 - корабль, формирователь 7 пеленга (φ) и расстояния до цели (Lк-ц), блок 8 формирования путевого угла цели (ПУц) и скорости цели (Vц), вычислитель 9 коррекции заданного путевого угла (ΔПУзд).
Все связи между блоками устройства приведены на чертежах. Реализация предлагаемого устройства может быть осуществлена с использованием микросхем типа 140 УД 6 (сумматор 4, формирователь 7 пеленга и расстояния до цели, блок 8 формирования путевого угла цели (ПУц) и скорости цели (Vц) и вычислитель 9 коррекции заданного путевого угла (ΔПУзд). Блок выработки угловой скорости, датчик угловой скорости - типовой «ДУС»-5 с чувствительностью не ниже 0,05 гр/с). Штатные корабельные системы: приемник СНС-2, рулевой привод 5.
Автоматическое управление движением корабля осуществляется в соответствии с величиной заданного путевого угла (ПУзд), который устанавливается в задатчике 1 путевого угла равным азимуту на цель. Для формирования закона управления по путевому углу также используют:
- приемник спутниковой навигации СНС-2, в котором формируют текущий путевой угол корабля (ПУ) и угловую скорость (ω),
- датчик руля 3, на выходе которого вырабатывается угол перекладки руля (δ),
- сумматор 4, на вход которого подключены выходы трех перечисленных выше блоков. В этом случае на выходе сумматора 4 будет формироваться закон управления рулевым приводом 5 в соответствии с зависимостью (1). Режим сближения корабля с подвижной целью начинается с определения пеленга (азимута) на цель (φк-ц) и расстояния до цели (Lк-ц) в формирователе 7 пеленга (φк-ц) и расстояния (Lк-ц) до цели. Оба сигнала поступают на вход блока 8 формирования путевого угла цели (ПУц) и скорости движения цели (Vц), на вход которого также поступают сигналы текущей широты и долготы корабля из приемника СНС-2.
Выходные сигналы из:
- блока 8: ПУц и Vц,
- формирователя 7: φк-ц,
- приемника СНС-2: Vк (скорости хода корабля),
вводятся на вход вычислителя 9 для выбора из библиотеки сигналов коррекции заданного путевого угла (ΔПУзд), конкретного значения ΔПУзд i в соответствии с текущими сигналами: ΔV=Vкi/Vц, и φцель-, кор i (угла пеленга на корабль из подвижной цели). Выход вычислителя 9 подключен к входу сумматора 4. Таким образом, на выходе сумматора 4 формируется закон управления сближением:

и обеспечивается сближение корабля с целью по прямой «волчьей погони».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
Изобретение относится к области судовождения. Способ управления сближением корабля с целью базируется на использовании системы автоматического управления движением корабля по путевому углу. Величина заданного значения путевого угла формируется как угол пеленга (азимута) - φ плюс приращение путевого угла - ΔПУзд. Величина приращения путевого угла ΔПУзд формируется как функция двух параметров процесса сближения корабля с целью: ΔПУзд=f(φ, ΔV), где ΔVкорабля/Vцели, Vкорабля - скорость хода корабля, Vцели - скорость хода цели, φ - пеленг цель-корабль. Изобретение обеспечивает формирование автоматического управления рулевым приводом при сближении корабля с подвижной целью по прямой, минимизацию времени сближения корабля с подвижной целью, определение на будущей траектории движения цели точки стыковки корабля с подвижной целью для оптимизации процесса сближения. 2 ил.
Способ управления сближением корабля с подвижной целью, использующий задатчик путевого угла (ПУзд.), приемник спутниковой навигационной системы (СНС), датчик руля, рулевой привод и сумматор, на вход которого вводят сигналы:
- заданного путевого угла (ПУзд.) - из задатчика путевого угла (ПУзд.),
- путевого угла (ПУ) - из приемника спутниковой навигационной системы,
- угла перекладки руля (δ) - из датчика руля, сигнал с выхода сумматора вводят на вход рулевого привода, отличающийся тем, что используют блок формирования путевого угла цели (ПУц) и скорости движения цели (Vц), вычислитель коррекции заданного путевого угла (ΔПУзд.) и формирователь пеленга (φ) и расстояния до цели (Lк-ц), в котором получают сигнал пеленга от корабля до цели (φк-ц) и сигнал расстояния корабль-цель (Lк-ц), на первый вход блока формирования путевого угла цели (ПУц) и скорости движения цели (Vц) вводят сигналы φк-ц и Lк-ц из формирователя пеленга (φ) и расстояния до цели (Lк-ц), а на второй вход вводят сигналы широты и долготы корабля из приемника спутниковой навигационной системы, на вход вычислителя коррекции заданного путевого угла (ΔПУзд.) вводят сигналы:
- путевого угла цели (ПУц) и скорости движения цели (Vц) из блока формирования путевого угла цели (ПУц) и скорости движения цели (Vц),
- скорости корабля (Vк.) - из приемника спутниковой навигационной системы,
- пеленга от корабля до цели (φк-ц) из блока формирования пеленга (φ) и расстояния до цели (Lк-ц),
сигнал коррекции заданного путевого угла - ΔПУзд. из вычислителя коррекции заданного путевого угла (ΔПУзд.) вводят на вход сумматора.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |

