Изобретение относится к комплексам навигации, управления и наведения летательных аппаратов (ЛА).
В наиболее близком аналоге, приведенном в книге [1] (Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. - М.: Транспорт, 1987 г.), представлен измеритель скорости (ИС) ЛА на основе использования доплеровского эффекта - доплеровский измеритель скорости и сноса (ДИСС), одним из серьезных недостатков которого является зависимость смещения спектра доплеровского сигнала от вида отражающей поверхности (см.[1], стр.19-22). Учет и компенсация этой зависимости в аналоге производится путем ввода корректирующих поправок (ΔХОПi, i=x,y,z), учитывающих характер отражающей поверхности и радиопрозрачность люка ДИСС; причем вводятся усредненные значения этих поправок для полетов над сушей и над морем: поправка для суши вводится автоматически, для моря - вручную (см.[1], стр.19-22). Однако так как указанная зависимость достаточно сложная, то и величины ΔХОПi, для разных конкретных условий могут существенно отличаться от усредненных значений (над сушей диапазон изменения ΔХОПi, составляет от 0.09% до 0.71%, над морем - от 0.97% до 2.3%). Вследствие этого возможны ухудшения качества коррекции ДИСС и система измерения скорости становится малоэффективной.
Задачей изобретения является повышение точности ИС и, как следствие этого, повышение эффективности работы ЛА, снабженных ИС.
Достигается указанный результат тем, что комплексная система определения скорости (КСОС), содержащая базовый измеритель скорости и блок коррекции, вход которого подключен к выходу базового измерителя скорости, а выход является выходом КСОС, дополнительно снабжена блоком корректирующих средств, блоком формирования корректирующих поправок, блоком хранения корректирующих поправок, блоком анализа обстановки, причем первый вход блока формирования корректирующих поправок подключен к выходу блока корректирующих средств, второй вход блока формирования корректирующих поправок подключен к выходу базового измерителя скорости, первый вход блока хранения корректирующих поправок подключен к выходу блока анализа обстановки, второй вход блока хранения корректирующих поправок подключен к выходу блока формирования корректирующих поправок, выход блока хранения корректирующих поправок подключен ко второму входу блока коррекции.
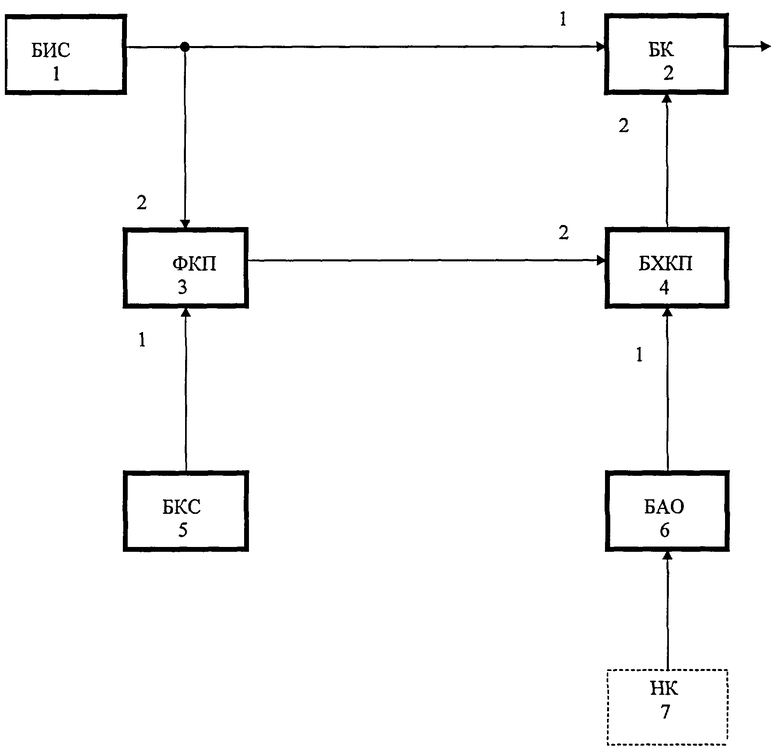
На чертеже представлена блок-схема комплексной системы определения скорости, содержащей следующие блоки:
1 - базовый измеритель скорости БИС;
2 - блок коррекции БК;
3 - блок формирования корректирующих поправок ФКП;
4 - блок хранения корректирующих поправок БХКП;
5 -блок корректирующих средств БКС;
6 - блок анализа обстановки БАО.
На чертеже показан также
7 - навигационный комплекс НК,
не входящий в состав предлагаемого устройства.
Информационный обмен между входами-выходами блоков осуществляется по линиям связи, показанным на чертеже тонкой сплошной линией. Линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блок БИС 1 представляет собой известное устройство - ДИСС, описанное, например, в литературе [1].
Блок БКС 5 представляет собой известные датчики и системы бортового оборудования ЛА, описанные в литературе, например [3], стр.8-16,171-243, 316-317, 325-327, 374-385. В состав блока БКС 5 входит, например, спутниковая навигационная система (СНС), измеряющая временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта; высокоточная инерциальная навигационная система, счисляющая скорости и координаты объекта. Вычислительно-логические блоки БК 2, ФКП 3, БАО 6 выполнены, например, в виде однопроцессорных вычислителей ([2], стр.31). Блок БХКП 4 выполнен, например, на постоянном запоминающем устройстве ПЗУ ([2], стр.30).
Блок БК 2 обеспечивает коррекцию параметров, выдаваемых БИС 1, на величину поправок, полученных с помощью блоков ФКП 3 и хранящихся в блоке БХКП 4, например, с помощью алгоритма вида:

Здесь  суть компоненты скорректированного (выходного) вектора скорости ЛА.
суть компоненты скорректированного (выходного) вектора скорости ЛА.
Дополнительно введенный блок ФКП 3 обеспечивает расчет корректирующих поправок к скорости ЛА, измеренной БИС 1 для конкретных текущих условий полета: над определенным видом отражающей поверхности. При этом используются составляющие вектора скорости, измеренные, с одной стороны, с помощью БИС 1 и, с другой стороны, с помощью БКС 5. Алгоритм формирования корректирующих поправок ΔХОПi (i=x,y,z) может заключаться, например, в усреднении на интервале времени Т величины относительной разности вида
ΔХОПi(tj)=1-VБИС(tj)/VБКС(tj),
где VБИС(tj) и VБКС(tj) - скорости ЛА в момент времени tj, измеренные с помощью БИС 1 и БКС 5 соответственно.
ΔХОПi отыщется как среднее значение текущей величины ΔХОПi(tj) на интервале времени от tj=t0 до tj=t0+Т.
С целью фильтрации измерительных высокочастотных шумов измерений может быть применен более сложный алгоритм обработки измеряемых величин VБИС и VБКС, например, на основе метода наименьших квадратов (см., например, литературу [4], стр.923-927), который минимизирует дисперсии ошибок оценивания величин ΔХОПi.
Дополнительно введенный блок БХКП 4 обеспечивает запоминание полученных корректирующих поправок и условий полета (вида подстилающей поверхности), для которых эти поправки получены. Также этот блок обеспечивает выдачу нужных значений поправок в блок коррекции БК 2.
Дополнительно введенный блок БАО 6 на основе анализа текущего состояния ЛА (координат, времени года и суток) осуществляет распознавание вида отражающей поверхности для адресного запоминания и выбора корректирующих поправок в блоке БХКП 5.
КСОС работает следующим образом.
Измеряемая с помощью БИС 1 скорость VБНС ЛА поступает на вход блока БК 2, в котором производится ее коррекция с помощью полученных оценок ΔХОПi (i=x,y,z), поступающих в блок БК 2 с выхода блока БХКП 4. Скорректированная информация
Vвыход поступает на выход БК 2, являющийся выходом ИС. Кроме того, измеренная с помощью БИС 1 скорость VБНС поступает на второй вход блока ФКП 3, на первый вход которого с выхода блока БКС 5 поступает величина VБКС, измеренная корректирующим средством из состава блока БКС 5.
В блоке ФКП 3 производится обработка величин VБНС и VБКС, в результате определяются соответствующие корректирующие поправки для текущего состояния полета (вида отражающей поверхности).
В блоке БАО 6 по информации, поступающей из НК 7, осуществляется распознавание (идентификация) текущих условий полета, например: дневной полет над штилевым морем или ночной полет над лесом и т.п. Информация об условиях полета поступает в блок БХКП 5, например, в виде соответствующего признака.
Блок БХКП 4 работает в двух основных режимах: во-первых, при наличии информации от БКС 5 и, соответственно, ФКП 3; во-вторых, при отсутствии такой информации, например, при пропадании сигналов блока БКС 5 (например, при попадании ЛА в зону постановки помех для СНС). В первом режиме осуществляется запись сформированных в ФКП 3 поправок в ячейку памяти, соответствующую поименованным условиям полета, и, кроме этого, выдача этих поправок в блок БК 2 для коррекции сигналов блока БИС 1. Во втором режиме в блоке БХКП 4 осуществляется выбор из соответствующей ячейки памяти (согласно идентифицированным блоком БАО 6 условиям) ранее записанных корректирующих поправок и выдача их в блок БК 2. Введение в состав ИС блоков ФКП 3, БКС 5 обеспечивает оперативную и точную подстройку корректирующих поправок для конкретных условий полета, а введение блоков БХКП 4, БАО 6 - запоминание этих поправок для разных условий и селективную выборку в условиях отсутствия опорной информации блока БКС 5.
Таким образом, введение в состав ИС описанных блоков обеспечивает гибкую оперативную реконфигурацию алгоритмов обработки информации измерительной системы, формирование, запоминание и выбор наиболее подходящих к текущему режиму полета корректирующих поправок, вследствие чего устраняются недостатки наиболее близкого аналога и расширяются функциональные возможности системы.
На примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей ИС и, как следствие, повышение эффективности применения оснащаемых ею летательных аппаратов.
ЛИТЕРАТУРА
1. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. - М.: Транспорт, 1987 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
4. И.Н.Бронштейн, К.А.Семендяев. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, ГРФМЛ, 1980 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПЕРАТИВНЫХ ЦЕЛЕЙ | 2008 |
|
RU2383468C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
Изобретение относится к области приборостроения, а именно к навигационным приборам для контроля и управления летательными аппаратами. Технический результат - повышение точности измерения скорости. Для достижения данного результата в систему дополнительно введены блоки высокоточных корректирующих средств, формирования и хранения корректирующих поправок и анализатор обстановки. Причем первый вход блока формирования корректирующих поправок подключен к выходу блока корректирующих средств, второй вход блока формирования корректирующих поправок подключен к выходу базового измерителя скорости. Первый вход блока хранения корректирующих поправок подключен к выходу блока анализа обстановки, а его второй вход - к выходу блока формирования корректирующих поправок. Корректирующие поправки формируются при наличии информации от корректирующих средств и запоминаются вместе с признаком конкретных условий полета в блоке хранения корректирующих поправок. 1 ил.
Комплексная система определения скорости, содержащая базовый измеритель скорости и блок коррекции, вход которого подключен к выходу базового измерителя скорости, а выход является выходом комплексной системы определения скорости, отличающаяся тем, что комплексная система определения скорости дополнительно снабжена блоком корректирующих средств, блоком формирования корректирующих поправок, блоком хранения корректирующих поправок, блоком анализа обстановки, причем первый вход блока формирования корректирующих поправок подключен к выходу блока корректирующих средств, второй вход блока формирования корректирующих поправок подключен к выходу базового измерителя скорости, первый вход блока хранения корректирующих поправок подключен к выходу блока анализа обстановки, второй вход блока хранения корректирующих поправок подключен к выходу блока формирования корректирующих поправок, выход блока хранения корректирующих поправок подключен ко второму входу блока коррекции.
| ФЛЕРОВ А.Г., ТИМОФЕЕВ В.Т | |||
| Доплеровские устройства и системы навигации | |||
| - М.: Транспорт, 1987, с.19-22 | |||
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| US 5325098 A, 28.06.1994 | |||
| БАШЕННЫЙ КРАН | 0 |
|
SU205246A1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ВЕКТОРА СКОРОСТИ | 2001 |
|
RU2188432C1 |

