Данное изобретение относится к способу и устройству для управления тягой летательного аппарата, в особенности транспортного самолета, многодвигательного и, в частности, двухдвигательного типа.
Известно, что обычно на самолете вертикальный стабилизатор (то есть неподвижная часть вертикального оперения самолета, предназначенная для обеспечения его навигационной устойчивости) и руль направления (то есть подвижный щиток, закрепленный на вертикальном стабилизаторе, которым можно маневрировать с целью изменения направления самолета) имеют размеры, позволяющие самолету полностью соответствовать различным полетным требованиям (так или иначе описанным в правилах), в частности, таким, как минимальная эволютивная скорость (VMC скорость) при отказе одного из двигателей.
Также известно, что для улучшения летных характеристик самолета (таких, как расход топлива, уровень шума и т.д.) без уменьшения полезной нагрузки, конструкторам приходится по возможности уменьшать массу самолета, а именно уменьшать массу самой конструкции, ее компонентов, оборудования и т.д., а в особенности, массу упомянутых вертикального стабилизатора и руля направления. Однако уменьшение размеров вертикального стабилизатора и руля направления для таких целей автоматически увеличивает вышеупомянутую VMC скорость в ущерб летным характеристикам самолета потому, что, если один из двигателей выходит из строя, минимальная скорость, которая должна быть достигнута, увеличивается.
Настоящее изобретение относится к способу управления тягой многодвигательного летательного аппарата, позволяющему устранить вышеуказанные недостатки.
С этой целью, в соответствии с данным изобретением, упомянутый метод отличается следующим:
а) определяют параметр, характеризующий текущий вес летательного аппарата, и упомянутый текущий вес выводят из этого параметра. Этим параметром может быть как, например, сам текущий вес самолета, так и угол атаки;
b) рассчитывают уменьшенное значение тяги, которое пропорционально текущему весу, определенному на этапе а);
с) определяют, по меньшей мере, одну команду на двигатель, команду, которая является такой, что, если она подается на те двигатели упомянутого летательного аппарата, которые не отказали, эти двигатели выдают тягу, по существу равную уменьшенному значению тяги, рассчитанной на этапе b); и
d) упомянутая команда, определенная на этапе с), подается на те двигатели летательного аппарата, которые не отказали.
Способ в соответствии к настоящим изобретением может быть применен к летательному аппарату, у которого все двигатели работающие. Однако, в предпочтительном варианте осуществления данного способа, двигатели летательного аппарата должны контролироваться таким образом, чтобы была возможность выявить отказ одного из упомянутых двигателей, а этапы а) и d) осуществляют только в том случае, если обнаруживают отказ одного из двигателей.
Итак, на основании изобретения, когда отказывает один из двигателей летательного аппарата, тяга двигателя или двигателей, которые не отказали, уменьшается (как функция от веса летательного аппарата) таким образом, чтобы угол наклона тоже уменьшался, но в то же время оставался достаточно крутым и устойчивым, предотвращая нежелательные положения летательного аппарата в полете, если летательный аппарат вынужден заходить на второй круг, когда его масса небольшая. В результате уменьшения момента рыскания этого или этих двигателя или двигателей, которые не отказали, теоретически минимальная эволютивная скорость VMC уменьшается независимо от веса летательного аппарата. Таким образом, становится возможным уравновесить летательный аппарат по рысканию без заброса руля направления. Это означает, что скорость не будет ограничена минимальной скоростью VMC. Таким образом, ограничения на летные характеристики, вследствие минимальной эволютивной скорости из-за отказа одного из двигателей, менее жесткие, и максимальная выгода от летных характеристик продольного движения летательного аппарата может быть достигнута путем уменьшения скорости полета, если это необходимо.
В результате, летательный аппарат, который реализует способ в соответствии с данным изобретением, значительно уменьшает ограничения на летные характеристики из-за минимальной скорости VMC. Различные вышеупомянутые требования к летным характеристикам могут, таким образом, быть достигнуты независимо от веса летательного аппарата, независимо от его скорости. Это, в частности, особенно выгодно для двухдвигательного летательного аппарата. Это связано с тем, что в двухдвигательном летательном аппарате тяга одного двигателя должна обеспечивать управляющий минимальный угол наклона при большой массе. Результатом этого является то, что при меньшей массе тяга отдельного двигателя больше тяги, необходимой для достижения нормативного угла наклона.
Более того, способ в соответствии с данным изобретением также позволяет выровнять угол наклона и пространственное положение самолета, особенно, со всеми работающими двигателями.
В предпочтительном варианте осуществления метода на этапе b) уменьшенное значение тяги FOEI вычисляют с использованием следующего выражения:
FOEI=mg(γcons + 1/f),
* где mg - упомянутый текущий вес, m - масса, а g - ускорение силы тяжести;
* γcons - значение угла наклона, соответствующее контрольному углу наклона; а
* f - текущее соотношение между подъемной силой и лобовым сопротивлением летательного аппарата.
В таком предпочтительном варианте осуществления упомянутое значение угла наклона γcons вычисляют с использованием следующего выражения:
γcons=γmin + Δγ,
где
* γmin - нормативное значение минимального значения угла наклона летательного аппарата; и
* Δγ - предопределенное значение угла наклона, например несколько градусов.
Кроме того, в конкретном конструктивном исполнении на этапе а) текущий вес летательного аппарата определяется суммированием веса летательного аппарата без топлива и (текущего) веса топлива, находящегося на борту упомянутого летательного аппарата.
В этом случае, эффективно во время этапа захода на посадку выполнять также следующие действия:
- до этапа d):
* первое значение веса самолета определяют суммированием веса самолета без топлива и веса топлива, находящегося на борту упомянутого летательного аппарата;
* второе значение веса определяют как функцию от текущего угла атаки летательного аппарата;
* упомянутые первое и второе значения веса сравниваются друг с другом; и
- на этапе d):
* в случае если упомянутые первое и второе значения равны или находятся в допустимом пределе, тогда упомянутая команда, определенная на этапе с), подается на те двигатели, которые не отказали, чтобы получить тягу, по существу равную уменьшенному значению тяги, рассчитанной на этапе b); и
* если первое и второе значения веса различаются (на более чем допустимый предел), команда подается на те двигатели, которые не отказали, для того, чтобы получить постоянную предопределенную тягу, например тягу типа TOGA (где TOGA - общеизвестная аббревиатура английского выражения “Take Off/Go Around” (“На взлет/Уходить на второй круг”).
Таким образом, когда текущий вес (а именно, упомянутое первое значение веса), который определяют с учетом веса топлива, находящегося на борту самолета, и который используют для определения вышеупомянутого уменьшенного значения тяги, отличается от (второго значения) веса, рассчитанного как функция от текущего угла атаки, уменьшенное значение силы тяги согласно этому изобретению не применяют. Это связано с тем, что, в таком случае, значение веса, получаемое через угол атаки, обычно определяется очень точно. Это означает, что текущее значение веса, определенное на этапе а), вероятно, является ошибочным и приводит, таким образом, к ошибочному значению уменьшенной силы тяги, вычисленному во время этапа b), и также является ошибочным для команды, определенной на этапе с) способа в соответствии с данным изобретением.
Настоящее изобретение также относится к устройству управления тягой многодвигательного летательного аппарата, в частности многодвигательного транспортного самолета и, в особенности, двухдвигательного самолета.
В соответствии с изобретением упомянутое устройство этого типа предпочтительно включает средство для контроля двигателей упомянутого летательного аппарата для того, чтобы иметь возможность обнаружить отказ одного из упомянутых двигателей, отличается тем, что дополнительно включает:
- первое средство для определения параметра, характеризующее текущий вес летательного аппарата, и для вывода упомянутого текущего веса из него;
- второе средство для расчета уменьшенного значения тяги, которое пропорционально упомянутому текущему весу, определенному упомянутым первым средством;
- третье средство для определения, по меньшей мере, одной команды на двигатель, которая является такой, что, если она подается на те двигатели, которые не отказали, эти двигатели выдают тягу, по существу равную упомянутому уменьшенному значению тяги, вычисленному упомянутым вторым средством; и
- четвертое средство для подачи команды, определенной третьим средством, на те двигатели летательного аппарата, которые не отказали.
Устройство в соответствии с данным изобретением делает, таким образом, возможным в случае отказа одного из двигателей адаптировать тягу этого или этих двигателя (двигателей), который не отказал или не отказали, таким образом, чтобы получить заданные летные характеристики, но с более низкой минимальной эволютивной скоростью (VMC скоростью) и более устойчивым положением самолета в полете.
Фигуры прилагающихся схем позволяют без труда понять, как устройство будет реализовано. На этих фигурах одинаковые сноски означают одинаковые элементы.
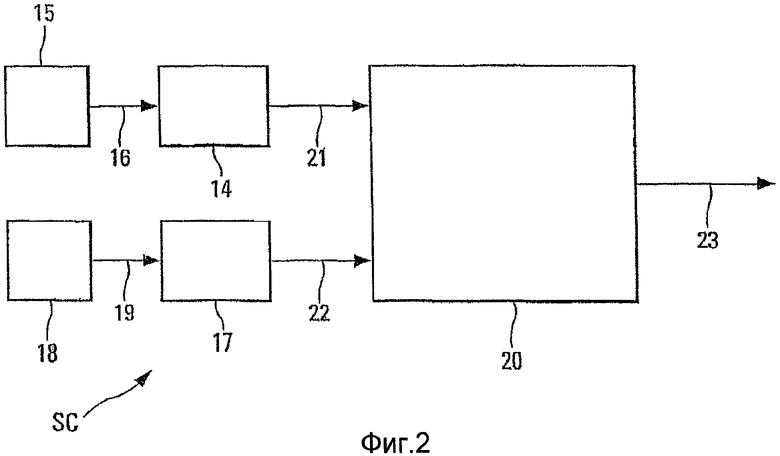
Фиг.1 - это структурная схема устройства управления в соответствии с данным изобретением.
Фиг.2 схематически показывает конкретное усовершенствование устройства управления в соответствии с данным изобретением.
Устройство 1 в соответствии с данным изобретением, схематически изображенное на фиг.1, предназначено для контролирования тяги многодвигательного летательного аппарата, в особенности многодвигательного транспортного самолета, не показанного на фиг.1.
Хотя, и не только, упомянутое устройство 1 применимо в большей степени для двухдвигательного самолета, и его предпочтительно использовать, по меньшей мере, во время этапа захода на посадку с целью приземления на взлетно-посадочную полосу.
Кроме того, в частности, упомянутое устройство 1 предназначается для применения, когда один из двигателей (он не изображен) многодвигательного летательного аппарата выходит из строя. Для этого упомянутое устройство 1 содержит обычное средство 2, предназначенное для контролирования двигателей летательного аппарата таким образом, чтобы иметь возможность обнаружить отказ одного из упомянутых двигателей.
Согласно изобретению устройство 1 дополнительно включает в себя следующее:
- средство 3 для определения параметра, представляющего текущий вес летательного аппарата, и для вывода упомянутого текущего веса из него. Этот параметр может быть как и непосредственно текущим весом, так и углом атаки, например, будет возможно определить текущий вес, используя обычное уравнение подъемной силы;
- средство 4 для вычисления уменьшенного значения тяги, которое пропорционально текущему весу, определенному упомянутым средством 3;
- средство 5, которое соединено со средством 4 через канал передачи данных 4А и которое выполнено таким образом, чтобы определять, по меньшей мере, одну команду на двигатель. Эта команда является такой, что при ее подаче на тот или те двигатель или двигатели, которые не отказали, этот или эти двигатель (двигатели) будут выдавать тягу, по существу равную уменьшенному значению тяги, вычисленной средством 4. В одном конкретном варианте выполнения средства 4 и 5 формируют часть центрального блока управления (UC), который, например, соединен через канал передачи данных 6 с упомянутым средством 3 и через канал передачи данных 13 со средством 2; и
- обычное средство 7, которое соединено через канал передачи данных 8 с центральным блоком управления (UC) и которое сформировано таким образом, чтобы подавать упомянутую команду, определенную средством 5, к тому (тем) двигателю (двигателям), который(ые) не отказал(и). Это обычное средство 7 может, например, обеспечивать команду на автономную цифровую систему управления двигателем типа FADEC (FADEC - общепризнанный акроним английского выражения “Full Authority Digital Engine Control” - “Автономная цифровая система управления двигателем”).
Таким образом, когда один из двигателей летательного аппарата отказывает, устройство 1 в соответствии с данным изобретением уменьшает тягу (как функцию от веса летательного аппарата) того или тех двигателя (двигателей), которые остаются рабочими, для того, чтобы уменьшить угол наклона упомянутого летательного аппарата, в то же время обеспечивая достаточный угол наклона для выполнения маневров. В результате, путем уменьшения момента рыскания того или тех двигателя (двигателей), которые не отказали, теоретическая минимальная эволютивная скорость (VMC скорость) уменьшается независимо от веса летательного аппарата. Таким образом, становится возможным уравновесить летательный аппарат по рысканию без заброса руля направления. Это означает, что скорость не будет ограничиваться минимальной скоростью VMC. Таким образом, ограничения на летные характеристики, обусловленные минимальной эволютивной скоростью из-за отказа одного из двигателей, становятся менее жесткими, и максимальная выгода от летных характеристик продольного движения летательного аппарата может быть достигнута путем уменьшения скорости полета, если это необходимо.
В результате, летательный аппарат, использующий устройство 1 в соответствии с данным изобретением, значительно уменьшает ограничения на летные характеристики, обусловленные минимальной скоростью VMC. Различные летные требования могут, таким образом, быть достигнуты независимо от веса самолета и независимо от его скорости. Это особенно выгодно для двухдвигательного летательного аппарата.
Более того, устройство 1 в соответствии с данным изобретением имеет также преимущество, что оно может применяться, даже когда все двигатели летательного аппарата исправны, чтобы добиться более устойчивого пространственного положения самолета, защитить двигатели и таким образом уменьшить повреждения. Плюс ко всему, это позволяет экономить на расходах на техобслуживание.
В предпочтительном варианте осуществления метода средство 4 вычисляет значение уменьшенной тяги FOEI, используя следующее соотношение:
FOEI = mg(γcons + 1/f), где
* mg - текущий вес, m - масса, а g - ускорение силы тяжести;
* γcons - значение угла наклона, равное контрольному углу наклона; а
* f - текущее соотношение между подъемной силой и лобовым сопротивлением летательного аппарата.
В предпочтительном варианте осуществления средство 4 также вычисляет значение угла наклона из следующего выражения:
γcons = γmin + Δγ,
где
* γmin - нормативное значение минимального угла наклона летательного аппарата; а
* Δγ - предопределенное значение угла наклона, например 0,5° градусов.
Данное устройство 1 также включает в себя серию источников информации 9, которые соединены связью 10 с центральным блоком управления UC и которые способны подавать на блок управления значения множества параметров, в частности значения вышеупомянутого текущего соотношения f.
В данном исполнении устройство 1 дополнительно включает в себя систему контроля (SC), изображенную схематически на фигуре 2. Эта система контроля SC используется, когда место посадки находится в зоне прямой видимости, в частности:
- средство 14, например, подобное упомянутому средству 3 или соответствующее средству 3, которое сформировано таким образом, чтобы определить первое значение веса летательного аппарата. Для этого упомянутое средство 14 (так же, как и средство 3) суммирует вес летательного аппарата без топлива с весом топлива, находящегося на борту летательного аппарата. Обычно, вес летательного аппарата без топлива определяется пилотом и вводится им в устройство 1, используя обычное средство ввода 15, которое, как правило, представляет собой многофункциональный блок управления и индикации типа MCDU (где MCDU - общепринятая аббревиатура от английского выражения “Multifunction Control Display Unit” - “Многофункциональный блок управления и индикации”), который соединен через канал передачи данных 16 с упомянутым средством 14;
- средство 17 обычным путем определяет второе значение веса летательного аппарата как функцию от текущего угла атаки, которое, например, получено от обычного средства 18, последнее соединено через канал передачи данных 19 с упомянутым средством 17. Это средство 18 может быть частью упомянутой совокупности источников информации 9. Кроме того, упомянутое средство 17 содержит обычную схему, используемую для определения второго значения веса из уравнения подъемной силы, основанного, например, на измерении угла атаки во время полета. Масса может быть определена из этого уравнения путем коррелирования ее со скоростью;
- средство 20, которое соединено через каналы передачи данных 21 и 22 со средствами 14 и 17 и которое предназначено для сравнивания первого и второго значений веса друг с другом и выработки команды в зависимости от этого сравнения.
В соответствии с данным изобретением целью упомянутого средства 20 является запрещение применения вышеупомянутого уменьшенного значения тяги к тому (тем) двигателю (двигателям), которые не отказали, когда упомянутые первое и второе значения веса отличаются друг от друга. Для этого упомянутое средство 20 может, например, передать запрещающую команду центральному блоку управления UC через канал передачи данных 23.
Таким образом, на основании системы контроля SC:
- если первое и второе значения веса равны (или находятся в допустимом пределе, например, равном нескольким процентам от текущей массы), то устройство 1 подает упомянутую команду на тот (те) двигатель (двигатели), которые не отказали, с целью получения тяги, по существу равной уменьшенному значению тяги, которое вычисляется средством 4; и
- если первое и второе значения веса отличаются друг от друга (больше чем на заданную величину), то устройство 1 подает обычную команду на тот (те) двигатель (двигатели), которые не отказали, чтобы получить постоянную предопределенную тягу, например силу тяги TOGA типа (где TOGA - общепринятая аббревиатура английского выражения “Take Off/ Go Around” (“На взлет/Уходить на второй круг”).
В результате, если текущий вес (то есть первое значение веса), который определяется средством 14 с учетом веса топлива, находящегося на борту летательного аппарата, и который используется для определения уменьшенного значения тяги, отличается от веса, вычисленного средством 17 как функция от текущего угла атаки, то устройство 1 в соответствии с данным изобретением не использует полученное уменьшенное значение тяги, так как во время захода на посадку (в течение которого упомянутая система управления предпочтительно активизирована) значение веса, полученное из угла атаки, обычно очень точное, что означает, что текущий вес, определенный средством 14 и 3, вероятно, является ошибочным. Использование этого ошибочного значения приводит к неправильному определению уменьшенного значения силы тяги, посчитанного средством 4 и заданного командой, определенной аппаратом 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ, УСТРОЙСТВО СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2514293C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЕТНОГО ЭКСПЕРИМЕНТА | 2022 |
|
RU2790358C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСА ТОПЛИВА НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2002 |
|
RU2234685C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2006 |
|
RU2369907C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ МУХАМЕДОВА НА ПРЫЖКОВОМ ШАССИ | 2011 |
|
RU2497721C2 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ ЮСТИРОВКИ ПРИЦЕЛА ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2000 |
|
RU2187776C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
Изобретение относится к способу и устройству управления тягой многодвигательного летательного аппарата. Устройство и способ управления тягой заключаются в том, что определяют параметр, характеризующий текущий вес, и выводят его из этого параметра, рассчитывают уменьшенное значение тяги, которое пропорционально текущему весу, и определяют команду, которая подается на те двигатели летательного аппарата, которые не отказали. Эти двигатели выдают уменьшенную тягу в соответствии с рассчитанной. Достигается улучшение летных характеристик самолета без уменьшения полезной нагрузки. 3 н. и 4 з.п. ф-лы, 2 ил.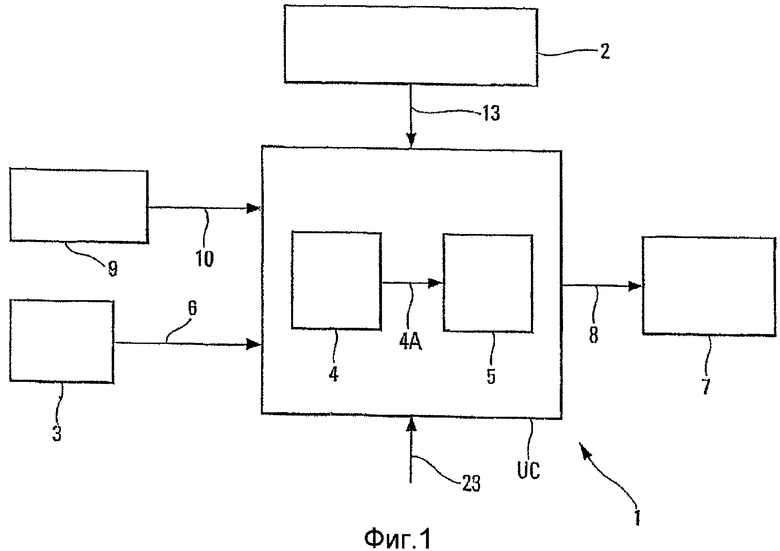
1. Способ управления тягой многодвигательного летательного аппарата, в данном способе: с) определяют, по меньшей мере, одну команду на двигатель, команду, которая является такой, что, если она подается на те двигатели летательного аппарата, которые не отказали, эти двигатели выдают тягу, по существу, равную уменьшенному значению тяги, и d) упомянутую команду, определенную на этапе с), подают на те двигатели летательного аппарата, которые не отказали, в котором с целью определения упомянутого уменьшенного значения тяги, используемого на этапе с): а) определяют параметр, характеризующий текущий вес летательного аппарата, и упомянутый текущий вес выводят из этого параметра и b) в качестве уменьшенного значения силы тяги вычисляют уменьшенное значение тяги FOEI, которое пропорционально упомянутому текущему весу летательного аппарата, это выполняют с использованием следующего выражения: FOEI=mg(γcons+1/f), где mg - упомянутый текущий вес, m - масса, a g - ускорение силы тяжести; γcons - значение угла наклона, соответствующее контрольному углу наклона и f - текущее соотношение между подъемной силой и лобовым сопротивлением летательного аппарата.
2. Способ по п.1, в котором, пока летательный аппарат находится в полете, двигатели упомянутого летательного аппарата контролируются таким образом, чтобы быть в состоянии обнаружить отказ одного из упомянутых двигателей, и этапы а) и d) выполняются только в том случае, когда обнаружен отказ одного из упомянутых двигателей.
3. Способ по п.1, в котором упомянутое значение угла наклона γcons вычисляют с использованием следующего выражения: γcons=γmin+Δγ,
где γmin - нормативное значение минимального угла наклона для летательного аппарата, a Δγ - предопределенное значение угла наклона.
4. Способ по п.1, в котором на этапе а) текущее значение веса летательного аппарата определяют суммированием веса летательного аппарата без топлива с весом топлива, находящегося на борту упомянутого летательного аппарата.
5. Способ по п.1, в котором во время этапа захода на посадку выполняют также следующие операции: перед этапом d) первое значение веса летательного аппарата определяют суммированием веса летательного аппарата без топлива с весом топлива, находящегося на борту упомянутого летательного аппарата, второе значение веса определяют как функцию от текущего угла атаки летательного аппарата, первое и второе значения веса сравнивают между собой, и на этапе d), если упомянутые первое и второе значения веса равны с допустимым пределом, то на двигатели, которые не отказали, подают упомянутую команду для того, чтобы получить тягу, по существу, равную уменьшенному значению тяги, вычисленному на этапе b), и, если упомянутые первое и второе значения веса различны, то на те двигатели, которые не отказали, подают команду для того, чтобы получить постоянную предопределенную тягу.
6. Устройство для управления тягой многодвигательного летательного аппарата, причем упомянутое устройство содержит средство (5) для определения, по меньшей мере, одной команды на двигатель, такой, что, если она подается на те двигатели, которые не отказали, эти двигатели выдают тягу, по существу, равную уменьшенному значению тяги, и средство (7) для подачи упомянутой команды на те двигатели летательного аппарата, которые не отказали, средство (3) для определения параметра, характеризующего текущий вес летательного аппарата, и для вывода из него упомянутого текущего веса, и средство (4) для вычисления в качестве уменьшенного значения тяги, уменьшенного значения тяги FOEI, которое пропорционально упомянутому текущему весу, с использованием следующего выражения: FOEI=mg(γcons+1/f), где mg - упомянутый текущий вес, m - масса, a g - ускорение силы тяжести, γcons - значение угла наклона, соответствующее контрольному углу наклона, a f - текущее соотношение между подъемной силой и лобовым сопротивлением летательного аппарата.
7. Летательный аппарат, содержащий устройство (1), подобное тому, которое описано в п.6.
| Учебный прибор для демонстрацииСВязи МЕжду ВРЕМЕННыМи и ВЕКТОРНыМидиАгРАММАМи ТРигОНОМЕТРичЕСКиХфуНКций | 1979 |
|
SU828206A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| Способ контроля разнотяговости двигателей многодвигательной силовой установки самолета | 1989 |
|
SU1838182A3 |
| Система управления двигательной установкой летательного аппарата | 1990 |
|
SU1822832A1 |

