Изобретение относится к лазерной технике и предназначено для формирования информационного поля лазерных систем телеориентации, навигации, оптической связи и может использоваться при управлении, посадке и стыковке летательных аппаратов, корректировке траектории полета самонаводящихся снарядов и ракет, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах.
Из уровня техники известен способ формирования информационного поля лазерной системы телеориентации (Патент US 4111385, опубликован 16.04.1976, МПК: F42B 13/30, F41G 7/12, F41G 7/14, F41G 9/00), основанный на использовании модулирующих растров.
К недостаткам данного способа можно отнести недостаточно высокое быстродействие и низкий энергетический потенциал, что ограничивает дальность управления.
Более совершенным является способ телеориентации (Патент GB 2133652, опубликован 25.07.1984, МПК: F41G 7/00, G01S 1/70), в котором лазерный пучок совершает возвратно-поступательное сканирование, вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем, после заполнения прямоугольного растра, направление сканирования меняют на ортогональное. Выделение координат управляемого объекта в информационном поле лазерной системы телеориентации основано на зависимости от этих координат длительности временного интервала между двумя соседними принимаемыми лазерными сигналами, возникающими при возвратно-поступательном сканировании лазерного пучка.
Данный способ требует дополнительных затрат времени при формировании кадра информационного поля из двух взаимно перпендикулярных растров, поскольку между тактами возвратно-поступательного сканирования лазерного пучка по строкам введены временные задержки признака координат, превышающие рабочее время.
Следует отметить также низкую помехозащищенность этого способа от случайных помеховых импульсов, которые могут попасть в большие интервалы между выделяемыми импульсами координат, что приводит к сбоям в определении координат управляемого объекта и его возможному срыву с необходимой траектории.
Наиболее близким к заявляемому техническому решению является способ формирования информационного поля лазерной системы телеориентации (Патент RU №2080615, опубликовано 27.05.1997, МПК: G01S 1/70), который выбран в качестве прототипа. Способ основан на поочередном формировании двух прямоугольных лазерных растров размерами L×L, образованных путем сканирования лазерного пучка в каждом растре по N строкам и развернутых вокруг общего центра друг относительно друга на 90°. Особенностью способа является формирование строк в растре циклами по М строк в цикле, с дискретными переходами лазерного пучка между соседними строками цикла на величину L/M. Каждую строку формируют за счет не менее трех тактов сканирования, со временем сканирования такта Тс и заданными задержками между тактами, причем только два соседних такта в каждой строке имеют встречное направление сканирования и равные времена задержек для первого и второго растров. По данному способу объект управления получает информацию о своем пространственном положении в виде двух ортогональных координат относительно центра двух последовательно формируемых лазерным пучком растров, образующих кадр. При прямом сканировании, реверсировании сканирования и дублировании последнего лазерный пучок проходит трижды по одной строке, а затем его сдвигают на шаг цикла (L/M) и повторяют операции по этой строке. Этим достигается удаление управляющих сигналов (представляющих собой группы из трех импульсов) по двум соседним строкам растра. Далее формируют следующий цикл, смещая сканирование лазерного пучка на ширину строки относительно первой строки предыдущего цикла, до заполнения растра. Объект управления, находящийся где-либо в пределах информационного поля, при прохождении по нему лазерного луча регистрирует в результате, по крайней мере, по три импульса в каждом растре. При этом интервал между первым и вторым импульсами зависит от удаления фотоприемного устройства объекта от начала строки, а интервал между вторым и третьим импульсами независим от положения объекта, что служит признаком передаваемой координаты.
Принадлежность «троек» к соответствующему растру по координатам Х и Y зафиксирована различными значениями временного интервала между вторым тактом сканирования (реверс лазерного пучка) и третьим тактом - дублированием реверса.
Но данный способ имеет ряд недостатков, снижающих его функциональную надежность: наличие в поле управления объектом энергетических «дыр» - зон, где отсутствует лазерное поле управления и объект не управляется, что приводит к появлению неполных групп информационных импульсов; объект управления, находящийся в информационном поле, работает асинхронно с системой формирования растров и не имеет к ней временной привязки, следовательно, идентификация полезных групп импульсов затруднительна и при принятии ложной команды управления может привести к срыву объекта с заданной траектории; восстановление информации из неполных групп информационных импульсов затруднительно из-за отсутствия временной синхронизации между объектом управления и системой формирования растров; в случаях, когда объект управления расположен в одном из формируемых при ортогональном переходе сканирования по растрам углов информационного поля, возможно ошибочное совмещение импульсов различных растров в ложную "тройку" по причине сопоставимости интервалов времени между растрами и между импульсами в одном растре, или при случайных пропусках сигналов в импульсной последовательности.
Технический результат изобретения направлен на повышение надежности выделения координат в системах телеориентации за счет восстановления синхронизации между объектом управления и системой формирования растров, при сохранении скорости передачи информации.
Технический результат достигается тем, что способ телеориентации движущихся объектов включает последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения. Причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле. При этом данный способ телеориентации движущихся объектов отличается от прототипа тем, что осуществляют восстановление импульсов синхронизации между объектом управления и системой формирования растров из информационных кадров, а также идентификацию полных групп импульсов и восстановление закодированной информации при регистрации неполных групп импульсов на основе восстановленных импульсов синхронизации. Причем восстановление импульсов синхронизации осуществляют по хотя бы одной, достоверно принятой группе импульсов по координатам Х и Y путем восстановления синхронизации для данной группы импульсов, после чего рассчитывают синхронизацию в пределах всего кадра Х и Y. При этом в случае приема следующей полной группы импульсов производят идентификацию полезных групп импульсов и пересчет синхронизации, а в случае приема неполной группы импульсов производят восстановление информации хотя бы по одному из импульсов в группе.
В рассматриваемом случае полная группа импульсов состоит из трех импульсов.
Сущность изобретения поясняется Фиг.1, Фиг.2.
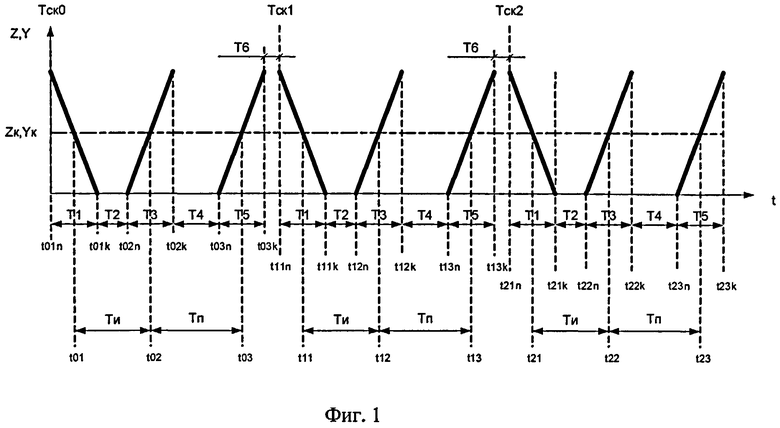
На Фиг.1 представлены метки синхронизации, которые соответствуют моментам времени начала формирования строк импульсов синхронизации.
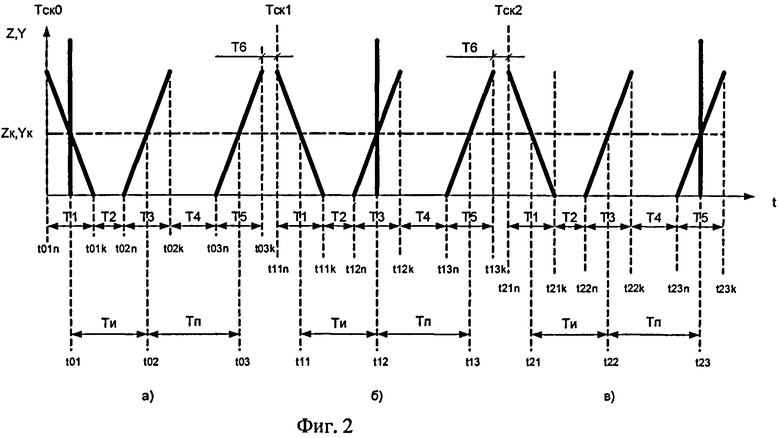
На Фиг.2 представлены неполные группы импульсов и рассчитанные метки синхронизации.
Предлагаемый способ телеориентации движущихся объектов осуществляется следующим образом. При облучении фотоприемного устройства (ФПУ) управляемого объекта лазерным пучком во время строчного сканирования, содержащего, например, три такта, ФПУ формирует три импульса. Временной интервал между двумя импульсами определяет величину координаты ФПУ с информационным полем (ИП), а временной интервал между вторым и третьим импульсами - ее признак (X или Y). В случае командного кадра временной интервал между двумя импульсами определяет величину команды, а временной интервал между вторым и третьим импульсами - ее признак (тип).
При формировании кадра используется:
Т1=Т3=Т5=Тс, где Tc - время сканирования по строке;
T4=T4 x,y - временная задержка, которая определяет тип передаваемой координаты.
Рассмотрим возможность выделения синхронизации из принятого сигнала (Фиг.2).
Синхронизация представляет собой моменты времени Тск0, Тск1, …, Тскn, которые соответствуют моментам времени начала формирования строк.
Как видно из Фиг.2 при передаче информационного кадра на каждую строку i может приходиться три импульса: первый импульс может находиться только в интервале [ti1n, ti1k], второй - только в интервале [ti2n, ti2k], третий - только в интервале [ti3n, ti3k], где i изменяется от 0 до n-1, a n - число строк (столбцов).
Из этого следует, что если заранее известна синхронизация, то становится возможным однозначно идентифицировать полезные группы импульсов (принадлежность импульсов к тройке, в рассматриваемом случае).
Импульсы, попадающие в интервалы (ti1k, ti2k), (ti2k, ti3n) и (ti3k, t(i+1)1n), где i изменяется от 0 до n-1, a n - число строк (столбцов), можно идентифицировать как явную помеху.
Зависимость моментов времени, соответствующих началу формирования строк (столбцов), можно представить в виде формулы:
Tcki+1=Tcki+T1+T2+T3+T4+T5+T6=Tcki+3Tc+T2+T4+T6,
где i ∈ Ni=0…n-1, a n - число строк (столбцов).
Зависимость времени прихода первого, второго и третьего импульсов от величины передаваемой информации Ти относительно моментов времени T cki, соответствующих началу формирования строк, можно представить в виде формул:


где i ∈ Ni=0…n-1, a n - число строк (столбцов).
Таким образом, по одной достоверно принятой группе (тройке) импульсов можно восстановить синхронизацию в пределах кадра.
Для восстановления синхронизации в пределах последующих кадров необходимо и достаточно достоверно принять группы (тройки), соответствующие координатам Х и Y.
Рассмотрим возможность восстановления информации:
После вычисления синхронизации в пределах всего кадра становится возможным восстанавливать информацию хотя бы по одному из импульсов в группе (тройке).
Восстановление информации по первому импульсу в тройке
(Фиг.2а):

Восстановление информации по второму импульсу в тройке (Фиг.2б):

Восстановление информации по третьему импульсу в тройке (Фиг.2в):

Алгоритм восстановления синхронизации:
1) По хотя бы одной достоверно принятой группе (тройке) импульсов по координате Х восстанавливают синхронизацию в пределах группы (тройки) согласно одной из формул:


2) далее рассчитывают синхронизацию в пределах всего кадра Х согласно формуле:
Tcki+1=Teki+3Tc+T2+T4+T6,
3) По хотя бы одной достоверно принятой группе (тройке) импульсов по координате Y восстанавливают синхронизацию в пределах группы (тройки) согласно одной из формул:

4) Далее рассчитывают синхронизацию в пределах всего кадра Y и для последующего кадра согласно формуле:
Tcki+1=Tcki+3Tc+Т2+Т4+Т6,
5) В случае приема полной группы импульсов производят пересчет синхронизации согласно п.1, п.2 или п.3, п.4 при приеме координат Х и Y соответственно.
6) В случае приема неполной группы импульсов производят восстановление информации согласно одной из формул:
Восстановление информации по первому импульсу в тройке:

Восстановление информации по второму импульсу в тройке:

Восстановление информации по третьему импульсу в тройке:

Восстановление импульсов синхронизации обеспечивает гарантированную идентификацию групп полезных сигналов, возникающих при формировании информационного поля (ИП), и позволяет восстанавливать информацию из неполных групп сигналов.
Таким образом, предлагаемый способ телеориентации движущихся объектов обеспечивает синхронизацию между объектом управления и системой формирования растров, что позволяет однозначно идентифицировать полезные группы сигналов и восстанавливать информацию неполных групп сигналов, а следовательно, повышает надежность выделения координат. При этом скорость передачи информации сохраняется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| Способ телеориентации движущихся объектов | 2015 |
|
RU2614333C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2537662C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ЛАЗЕРНОЙ ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504906C1 |
Изобретение предназначено для формирования информационного поля лазерных систем телеориентации, навигации и оптической связи. Достигаемый технический результат - повышение надежности выделения координат в системах телеориентации, при сохранении скорости передачи информации. Результат достигается тем, что заявленный способ включает последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, при этом осуществляют восстановление импульсов синхронизации между объектом управления и системой формирования растров из информационных кадров, а также идентификацию полных групп импульсов (ГИ) и восстановление закодированной информации при регистрации неполных ГИ на основе восстановленных импульсов синхронизации. Восстановление импульсов синхронизации осуществляют по, хотя бы одной, достоверно принятой ГИ по координатам X и Y путем восстановления синхронизации для данной ГИ, после чего рассчитывают синхронизацию в пределах всего кадра X и Y. В случае приема следующей полной ГИ производят идентификацию полезных ГИ и пересчет синхронизации, а в случае приема неполной ГИ производят восстановление информации хотя бы по одному из импульсов в группе. 1 з.п. ф-лы, 2 ил.
1. Способ телеориентации движущихся объектов, осуществляемый с помощью информационного поля, включающий последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, отличающийся тем, что осуществляют восстановление импульсов синхронизации между объектом управления и системой формирования растров из информационных кадров, а также идентификацию полных групп импульсов и восстановление закодированной информации при регистрации неполных групп импульсов на основе восстановленных импульсов синхронизации, при этом восстановление импульсов синхронизации осуществляют по, хотя бы одной, достоверно принятой группе импульсов по координатам X и Y путем восстановления синхронизации для данной группы импульсов, после чего рассчитывают синхронизацию в пределах всего кадра X и Y, причем в случае приема следующей полной группы импульсов производят идентификацию полезных групп импульсов и пересчет синхронизации, а в случае приема неполной группы импульсов производят восстановление информации хотя бы по одному из импульсов в группе.
2. Способ телеориентации по п.1, отличающийся тем, что полная группа импульсов состоит из трех импульсов.
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| US 4716298 А, 29.12.1987 | |||
| УСТРОЙСТВО для ОБРАЗОВАНИЯ ВОДЯНОЙ ЗАВЕСЫ12 | 0 |
|
SU309962A1 |
| WO 1987005138 А, 27.08.1987 | |||
| Смазка для абразивной обработки натуральных минералов и синтетических сверхтвердых материалов | 1975 |
|
SU619502A1 |
| JP 4351988 А, 07.12.1992. | |||

