Настоящее изобретение относится к области приборостроения и может быть использовано в бесплатформенных инерциальных навигационных системах (БИНС).
Из существующего уровня техники в рассматриваемой области известен «Способ интеграции навигационной информации и самоинтегрированная инерциальная навигационная система» [1]. Такой способ повышения точности инерциальной навигационной системы (ИНС) основан на применении схемы самокоррекции ИНС, которая настраивается по информации от спутниковой навигационной системы (СНС). Указанный способ имеет следующие недостатки: для настройки схемы самокоррекции ИНС требуется внешняя информация, например, от СНС; так как не используется модель ошибок ИНС, то самокоррекция обеспечивается только по непосредственно наблюдаемым внешним параметрам, например, по информации о скорости от СНС; невысокая помехоустойчивость схемы самокоррекции из-за возможных сбоев СНС при настройке.
Наиболее близким к заявленному техническому решению является «Способ повышения точности бесплатформенной инерциальной навигационной системы» [2]. Такой способ повышения точности БИНС основан на применении математической модели погрешностей БИНС при совместной обработке информации инерциального счисления и спутниковой навигационной системы, результаты которой используются в виде оценок поправок к калибровочным величинам первичных погрешностей системы. При этом используются запомненные оценки поправок к калибровочным величинам первичных погрешностей системы, сформированные в предыдущем и/или предыдущих полетах. Указанный способ повышения точности БИНС имеет следующие недостатки: для оценки поправок к калибровочным величинам первичных погрешностей системы требуется внешняя информация, например, от СНС; из-за изменения условий эксплуатации БИНС оценки первичных погрешностей системы, сформированные в предыдущем и/или предыдущих полетах, могут ухудшать точностные характеристики БИНС при их использовании в текущем полете.
Задачей, на решение которой направлено заявляемое изобретение, является создание БИНС, не использующей внешнюю, в том числе, спутниковую информацию. В таком способе повышается также помехоустойчивость БИНС, исключается существенное нарастание ошибок при поступлении недостоверной информации от спутниковой навигационной системы.
Данная задача решается на основе применения математической модели погрешностей БИНС, их оценке с помощью фильтра Калмана [3] путем обработки наблюдений геофизических инвариантов, отличающаяся тем, что в качестве наблюдений применяются разности сигналов, пропорциональных вычисленным в БИНС и известным априорно значениям проекций вектора угловой скорости вращения Земли на оси инерциальной системы координат. Задача может также решаться, если в качестве наблюдений применить разности сигналов, пропорциональных вычисленным в БИНС и известным априорно значениям приращений углов поворота Земли в инерциальной системе координат за заданный промежуток времени.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности БИНС в автономном режиме функционирования без внешней, в том числе, спутниковой информации на основе использования данных об угловой скорости вращения Земли. При этом оценка поправок к выходным параметрам БИНС и к калибровочным величинам датчиков первичной информации проводится непрерывно.
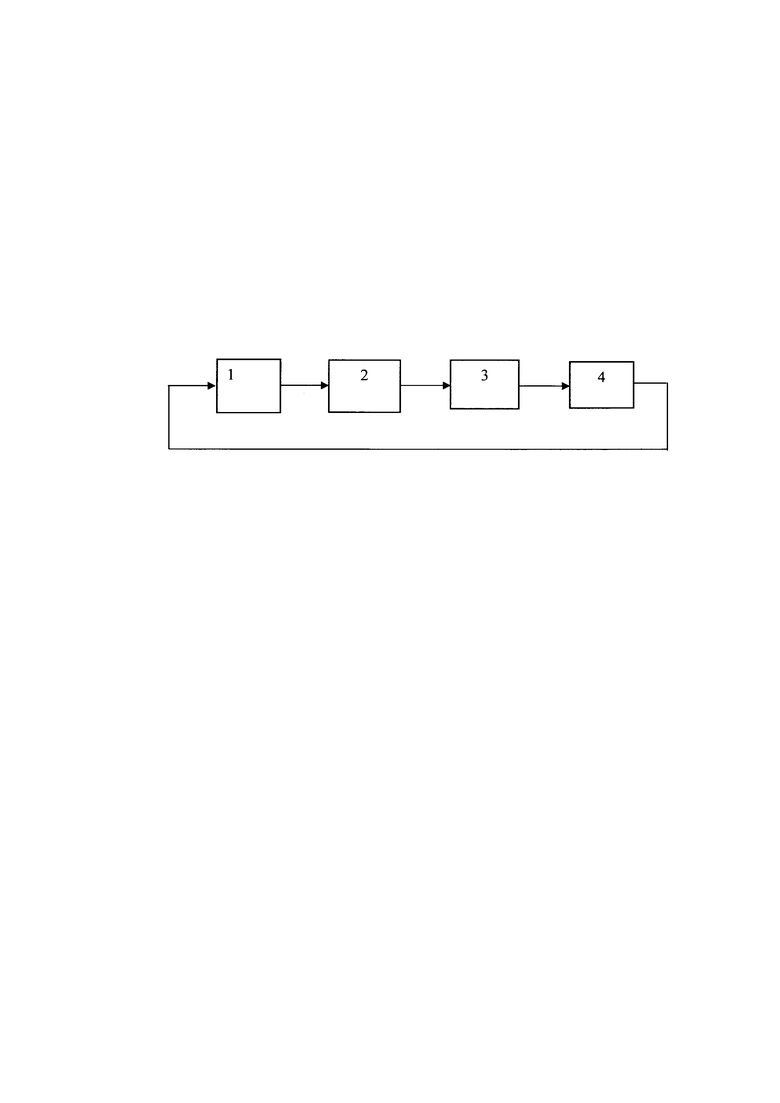
Сущность изобретения отражена на фиг., где показаны: 1 - бесплатформенная инерциальная навигационная система; 2 - формирователь инвариантов; 3 - формирователь наблюдений; 4 - оптимальный фильтр Калмана.
Заявляемый способ в соответствии с фиг. реализуется следующим образом. Из БИНС 1 в формирователь инвариантов 2 поступают сигналы с триады ортогонально размещенных датчиков угловой скорости (ДУС), а также сигналы, пропорциональные проекциям вектора угловой скорости вращения сопровождающего трехгранника [5] БИНС относительно земной поверхности, и сигналы, характеризующие вращение триады ДУС относительно сопровождающего трехгранника. В формирователе инвариантов сначала сигналы с триады ДУС пересчитываются на оси инерциальной системы координат с помощью соответствующей матрицы направляющих косинусов, затем из полученных после пересчета сигналов ДУС вычитаются полученные в БИНС следующие сигналы. Пересчитанные с помощью соответствующей матрицы направляющих косинусов на оси инерциальной системы координат сигналы угловых скоростей вращения сопровождающего трехгранника БИНС относительно земной поверхности и таким же образом пересчитанные сигналы, характеризующие вращение ДУС относительно сопровождающего трехгранника. Вычисленные в формирователе инвариантов 2 разностные сигналы поступают в формирователь наблюдений 3, где из вычисленных сигналов инвариантов вычитаются их априорно известные эталонные значения, характеризующие вращение Земли в инерциальной системе координат, а именно: вертикальная проекция вектора угловой скорости вращения Земли, равная 15,041 угловых секунд за секунду, и горизонтальные проекции также являющиеся постоянными и равными нулю. Сформированные таким образом сигналы наблюдений инвариантов поступают в оптимальный фильтр Калмана 4, где формируются оценки ошибок параметров БИНС и датчиков первичной информации: ДУС и акселерометров. Сформированные оценки ошибок с выхода фильтра Калмана 4 поступают для компенсации на вход БИНС 1.
Таким образом, предлагаемый способ обеспечивает непрерывную коррекцию параметров БИНС и датчиков первичной информации в автономном режиме по наблюдениям инвариантов, характеризующих проекции вектора угловой скорости Земли на оси инерциальной системы координат.
Заявленный способ формирования оценок ошибок позволяет повысить точность БИНС в автономном режиме без использования данных от спутниковой навигационной системы.
БИБЛИОГРАФИЧЕСКИЕ ДАННЫЕ ИСТОЧНИКОВ ИНФОРМАЦИИ
1. RU 2386108, Волжин Анатолий Сергеевич, 10.04.2010, Способ интеграции навигационной информации и самоинтегрированная инерциальная навигационная система.
2. RU 2593432, Вавилова Нина Борисовна, Голован Андрей Андреевич, Измайлов Евгений Аркадьевич, Кухтевич Сергей Евгеньевич, Парусников Николай Алексеевич, Фомичев Александр Владимирович, 10.08.2016, Способ повышения точности бесплатформенной инерциальной навигационной системы.
3. Браммер К., Зиффлинг Г. Фильтр Калмана-Бьюси, М.: Наука, 1982.-200 с.
4. ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. - М.: Издательство стандартов, 1981. - 52 с.
5. Бромберг П.В. Теория инерциальных систем навигации. - М.: Наука, ГРФМЛ, 1979. - 296 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
Настоящее изобретение относится к области приборостроения и может быть использовано в бесплатформенных инерциальных навигационных системах (БИНС). Способ повышения точности БИНС основан на применении математической модели погрешностей БИНС. При этом оценка поправок к выходным параметрам БИНС и к калибровочным величинам датчиков первичной информации проводится непрерывно. Оценка формируется с помощью фильтра Калмана путем обработки наблюдений геофизических инвариантов. В качестве наблюдений применяются разности сигналов, пропорциональных вычисленным в БИНС и известным априорно значениям проекций вектора угловой скорости вращения Земли на оси инерциальной системы координат. Технический результат - повышение точности БИНС в автономном режиме функционирования на основе использования данных об угловой скорости вращения Земли. 1 ил.
Способ повышения точности бесплатформенной инерциальной навигационной системы (БИНС), основанный на применении математической модели погрешностей БИНС и их оценке с помощью фильтра Калмана путем обработки наблюдений геофизических инвариантов, отличающийся тем, что в качестве наблюдений применяются разности сигналов, пропорциональных вычисленным в БИНС и известным априорно значениям проекций вектора угловой скорости вращения Земли на оси инерциальной системы координат.
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2593432C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| US 20050114023 A1, 26.05.2005. | |||

