Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к управлению локомотивами, а более конкретно к управлению работой отдаленного локомотива в поезде с распределенным подводом движущей силы в зависимости от неожиданного состояния потока текучей среды в тормозной магистрали.
Уровень техники
Эксплуатация поезда с распределенным подводом движущей силы обусловливает подвод движущей силы от головного локомотива и одного или более отдаленных локомотивов в составе поезда. Каждый головной и отдаленный локомотив включает в себя систему управления торможением для управления операциями торможения и систему связи для обмена информацией между головным и отдаленным локомотивами по линии связи. Тормозная магистраль обеспечивает взаимосвязь посредством текучей среды каждого из локомотивов и железнодорожных вагонов поезда, при этом для указания желаемых операций торможения обычно используется модуляция потока текучей среды, например давления текучей среды в тормозной магистрали. Торможение обычно осуществляется путем продувки или уменьшения давления в тормозной магистрали. Однако продувка тормозной магистрали только в головном локомотиве поезда требует распространения соответствующего снижения давления тормозной магистрали по всей длине поезда, тем самым замедляя торможение в железнодорожных вагонах и отдаленных локомотивах в хвосте поезда. В поездах с распределенным подводом движущей силы торможение эффективно осуществляется путем продувки тормозной магистрали и в головном локомотиве, и в отдаленных локомотивах поезда, тем самым ускоряя продувку тормозной магистрали и торможение по всему поезду.
Для поездов с распределенным подводом движущей силы и с линией оперативной связи между головным и отдаленным локомотивами, радиокоманды тяги и торможения, как правило, передаются в каждый отдаленный блок по линии связи, когда машинист в головном локомотиве поезда дает команду торможения. Например, по радиокомандам торможения, каждый отдаленный локомотив также продувает тормозную магистраль. Аналогично, отпускание тормозов, инициируемое в головном локомотиве поезда, также передается по линии радиосвязи, и каждый отдаленный локомотив может среагировать на это, отпуская свои тормоза и заполняя тормозную магистраль.
В случае если радиосвязь в поезде с распределенным подводом движущей силы оказывается неработоспособной, как правило, отводят заданный период времени, например 45 секунд, для того, чтобы попытаться повторно установить радиосвязь перед объявлением о потере связи. Например, отдаленный локомотив, испытывающий потерю связи, может поддерживать последнее наступившее по команде состояние тяги или торможения до тех пор, пока не будет повторно установлена связь или не истечет упомянутый заданный период времени. Если упомянутый период времени истекает до повторного установления связи, отдаленный локомотив может воплотить режим отказоустойчивого выхода из эксплуатации, например, запрещая заполнение или продувку тормозной магистрали в отдаленном локомотиве и/или понижая величину тяги отдаленного локомотива. В течение этого периода времени отдаленный локомотив продолжает реагировать на состояния потока текучей среды в тормозной магистрали, определенные в отдаленном локомотиве. Например, если в тормозной магистрали определено относительно малое падение давления, отдаленный локомотив может интерпретировать это падение как медленную утечку и попытаться заполнить тормозную магистраль, чтобы вернуть ее к ее предыдущему давлению.
Краткое описание чертежей
На единственном чертеже показан схематичный вид приведенной в качестве примера системы автоматического управления работой отдаленного локомотива поезда с распределенным подводом движущей силы для распространения указания о торможении с помощью тормозной магистрали по этой тормозной магистрали.
Подробное описание изобретения
Авторы настоящего изобретения наблюдали за поездом с распределенным подводом движущей силы, когда впереди расположенный отдаленный локомотив определял неожиданное состояние потока текучей среды в тормозной магистрали, не совпадающее с последней проведенной по радиокоманде операцией торможения, причем это состояние потока в тормозной магистрали может не распространяться на расположенные позади отдаленные локомотивы. Например, команда потока текучей среды в тормозной магистрали, соответствующая команде головного локомотива, обеспечивающая минимальное служебное торможение, может быть интерпретирована первым отдаленным локомотивом, определяющим падение давления в тормозной магистрали, как утечка. Тогда первый отдаленный локомотив может заполнить тормозную магистраль для корректирования утечки, что приводит к прерыванию распространения минимальной волны прикладываемого давления по тормозной магистрали к расположенным позади отдаленным локомотивам. Следовательно, расположенные позади отдаленные локомотивы могут оставаться в состоянии тяги и продолжать заполнять тормозную магистраль, несмотря на указание минимального служебного торможения, выданное головным локомотивом, что приводит к нежелательно увеличенным тормозным путям и увеличению сил, действующих на поезд. Поэтому авторы изобретения разработали новый способ управления работой первого отдаленного локомотива в поезде с распределенным подводом движущей силы в зависимости от неожиданного потока текучей среды в тормозной магистрали, вследствие чего указание торможения посредством тормозной магистрали распространяется по этой тормозной магистрали к расположенному позади второму отдаленному локомотиву с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого отдаленного локомотива.
На единственном чертеже показан схематичный вид приведенной в качестве примера системы 10 автоматического управления работой отдаленного локомотива 12 поезда с распределенным подводом движущей силы для распространения указания о торможении посредством тормозной магистрали по этой тормозной магистрали 14. Система 10 предпочтительно распространяет указание торможения посредством тормозной магистрали к расположенному позади отдаленному локомотиву с уменьшенными помехами потоку текучей среды в тормозной магистрали от отдаленного локомотива 12. Система 10 может включать в себя систему 18 управления торможением, сообщающуюся по текучей среде с тормозной магистралью 14 через клапан 20 тормозной магистрали, причем система 18 управления торможением управляет потоком текучей среды в тормозной магистрали в отдаленном локомотиве 12. Клапан 20 тормозной магистрали выполнен с возможностью обеспечения работы для лишения отдаленного локомотива 12 возможности управления потоком в тормозной магистрали, например, за счет прерывания сообщения посредством текучей среды между системой 18 управления торможением и тормозной магистралью 14. Соответственно клапан 20 тормозной магистрали может быть выполнен с возможностью предотвращения, или разрешения заполнения, или продувки тормозной магистрали в отдаленном локомотиве 12. Система 10 может также включать в себя систему 24 связи, такую как беспроводная система связи, для приема команд, выданных головным локомотивом по линии 34 связи.
В одном аспекте изобретения система 10 включает в себя контроллер 16 для приема сигнала 26 потока текучей среды из датчика 22 потока текучей среды и/или приема сигнала 36 давления текучей среды из датчика 32 давления текучей среды. Датчик 22 потока текучей среды контролирует состояние потока текучей среды в тормозной магистрали, например притока жидкости в тормозную магистраль 14 в отдаленном локомотиве 12, и генерирует сигнал 26 потока текучей среды в соответствии с состоянием измеряемого потока текучей среды. Датчик 32 давления текучей среды может контролировать состояние давления текучей среды в тормозной магистрали, например давление текучей среды в тормозной магистрали 14 в отдаленном локомотиве 12, и генерирует сигнал 36 давления текучей среды в зависимости от состояния измеряемого давления текучей среды.
В одном варианте осуществления изобретения контроллер 16 осуществляет управление работой клапана 20 тормозной магистрали в соответствии с состоянием потока текучей среды в тормозной магистрали, указываемым сигналом 26 потока текучей среды и/или сигналом 36 давления текучей среды. Контроллер 26 может иметь любую форму, известную в данной области техники, например может быть аналоговым либо цифровым микропроцессором или компьютером, и может быть встроен в один или более контроллеров, используемых для других выполнений функций, связанных с эксплуатацией отдаленного локомотива 12, либо объединен с одним или более таких контроллеров. Контроллер 16 может управлять работой системы 30 дроссельного управления, например, в зависимости от сигнала 26 потока текучей среды или сигнала 36 давления текучей среды. Контроллер 16 также может принимать сигнал 28 статуса работоспособности связи из системы 24 связи, указывающий, работоспособна или нет линия беспроводной связи, для осуществления связи с головным локомотивом с целью приема команд тяги или торможения. Контроллер 16 может управлять системой 30 дроссельного управления и/или клапаном 20 тормозной магистрали в зависимости от упомянутого сигнала 28 статуса.
В одном аспекте изобретения контроллер 16 может быть выполнен с возможностью осуществления этапов управления работой отдаленного локомотива, и тогда такие системы 20, 30 реагируют на различные входные сигналы, такие как сигналы 26, 28 или 36. Этапы, необходимые для таких способов, можно воплощать в аппаратных средствах, программных средствах или аппаратно-программных средствах в любой форме, которая доступна контроллеру 16 и может быть воплощена им, и могут быть запомнены на любом носителе информации, который является удобным для конкретного приложения. В одном варианте осуществления контроллер 16 может быть выполнен с возможностью определения состояния текучей среды в тормозной магистрали в отдаленном локомотиве, не соответствующего радиокоманде торможения, выданной головным локомотивом и последней принятой отдаленным локомотивом 12. Например, если принятая радиокоманда предписала отпускание тормозов, а текущий сигнал 26 потока текучей среды и/или сигнал 36 давления текучей среды указывает падение давления в тормозной магистрали 14, контроллер 16 определяет это состояние как состояние текучей среды в тормозной магистрали, не соответствующее последней радиокоманде, или неожиданное состояние потока текучей среды в тормозной магистрали. После определения неожиданного состояния потока текучей среды в тормозной магистрали контроллер 16 может обеспечивать лишение отдаленного локомотива 12 возможности управления потоком в тормозной магистрали. Например, вместо ожидания проведения проверки работоспособности связи, как обычно делается, контроллер 16 лишает отдаленный локомотив 12 возможности заполнения или продувания тормозной магистрали 14, не ожидая проверки связи, вследствие чего неожиданное состояние потока текучей среды в тормозной магистрали, которое может быть указанием торможения, без помех распространяется в позади расположенные отдаленные локомотивы. В одном аспекте изобретения упомянутое лишение возможности может предусматривать закрытие клапана 20 тормозной магистрали отдаленного локомотива для предотвращения заполнения или продувки тормозной магистрали 14 посредством системы 18 управления торможением. Помимо лишения отдаленного локомотива 12 возможности управления потоком в тормозной магистрали в зависимости от неожиданного состояния потока текучей среды в тормозной магистрали контроллер 16 может быть выполнен с возможностью уменьшения величины тяги отдаленного локомотива 12, например работы отдаленного локомотива 12 на холостом ходу, и/или лишения отдаленного локомотива 12 возможности реагирования на радиокоманды тяги, выданные головным локомотивом. Например, контроллер 16 может скомандовать системе 30 дроссельного управления перевести отдаленный локомотив 12 в режим холостого хода, вследствие чего отдаленный локомотив 12 не обеспечивает движущую силу поезду.
После лишения отдаленного локомотива 12 возможности управления потоком в тормозной магистрали контроллер 16 может обеспечить контроль сигнала 28 статуса связи, выданного системой 24 связи. Если проверка связи указывает, что радиосвязь с головным локомотивом неработоспособна, контроллер 16 может обеспечить снижение величины тяги отдаленного локомотива 12 вплоть до перехода в режим холостого хода и/или лишение отдаленного локомотива 12 возможности реагирования на радиокоманды управления тягой, выданные головным локомотивом. Если проверка связи указывает, что радиосвязь с головным локомотивом работоспособна, контроллер 16 может обеспечить продолжение обеспечения отдаленному локомотиву 12 возможности реагирования на радиокоманды управления тягой, выданные головным локомотивом.
В еще одном варианте осуществления, когда проверка связи указывает, что радиосвязь с головным локомотивом работоспособна, конфигурация контроллера 16 может обеспечить повторное обеспечение отдаленному локомотиву 12 возможности управления потоком текучей среды в тормозной магистрали, например, путем открывания клапана 20 тормозной магистрали, что позволит отдаленному локомотиву 12 заполнять и продувать тормозную магистраль 14. Этот этап можно проводить, когда отдаленный локомотив 12 находится в состоянии отпускания тормозов, если определяется неожиданное состояние потока текучей среды. В еще одном аспекте повторное обеспечение возможности управления потоком в тормозной магистрали может быть реализовано посредством контроллера 16 после приема радиокоманды отпускания тормозов отдаленным локомотивом и/или вслед за определением заданного роста давления тормозной магистрали в потоке текучей среды в тормозной магистрали, например, на величину около 3 фунтов на квадратный дюйм (psi).
В другом варианте осуществления, если отдаленный локомотив 12 находится в состоянии торможения, когда определяется неожиданное состояние потока текучей среды, а последующая проверка связи указывает, что радиосвязь с головным локомотивом работоспособна, контроллер 16 может обеспечить продолжение обеспечения первому отдаленному локомотиву 12 возможности реагирования на радиокоманды управления тягой, выданные головным локомотивом. Кроме того, когда в отдаленном локомотиве 12 принимается радиокоманда отпускания тормозов, контроллер 16 может повторно обеспечить отдаленному локомотиву 12 возможность управления потоком в тормозной магистрали, например, после определения заданного роста давления.
В еще одном варианте осуществления контроллер 16 может реализовывать способ адаптивного управления клапаном тормозной магистрали, если отдаленный локомотив 12 находится в состоянии отпускания тормозов, когда определяется неожиданное состояние потока текучей среды в тормозной магистрали. Этот способ может предусматривать определение неожиданного состояния потока текучей среды и осуществление проверки связи с головным локомотивом. Когда проверка связи указывает потерю связи с головным локомотивом, а измеряемое давление в тормозной магистрали в отдаленном локомотиве падает ниже заданного уровня в течение заданного периода времени, в отдаленный локомотив 12 может быть выдана команда его торможения, например команда выполнения минимального торможения. В приведенном в качестве примера варианте осуществления упомянутый заданный уровень может составлять 0,5 psi, а заданный период может составлять около 2-х секунд. Упомянутый способ может дополнительно включать в себя уменьшение величины тяги отдаленного локомотива 12, например обеспечение холостого хода локомотива 12 и/или лишение возможности управления тормозной магистралью, например, путем закрывания клапана 20 тормозной магистрали отдаленного локомотива 12.
В другом приведенном в качестве примера варианте осуществлении, если проверка связи указывает потерю связи с головным локомотивом после определения неожиданного состояния потока текучей среды в отдаленном локомотиве 12, способ может предусматривать уменьшение тяги первого отдаленного локомотива 12, когда неожиданное измеренное давление тормозной магистрали остается в заданных пределах в течение заданного периода времени. Например, этот способ может быть воплощен, когда неожиданное падение давления составляет менее чем около 0,5 psi примерно за 2 секунды. Упомянутый способ может дополнительно предусматривать лишение отдаленного локомотива возможности управления потоком в тормозной магистрали 14 и/или лишение отдаленного локомотива возможности реагирования на радиокоманды тяги и/или торможения, выданные головным локомотивом.
На основании вышеизложенного описания изобретение можно воплотить с помощью методов, предусматривающих использование компьютерных программных средств, аппаратных средств, аппаратно-программных средств или любой их комбинации либо подмножества, при этом технический эффект заключается в том, чтобы обеспечить распространение указания торможения посредством тормозной магистрали в зависимости от операции торможения головного локомотива по тормозной магистрали от первого отдаленного локомотива ко второму отдаленному локомотиву, расположенному позади первого отдаленного локомотива. Любую программу, получаемую в результате этого и имеющую машиночитаемые кодовые средства, можно воплотить или выполнить в одном или более машиночитаемых носителях, создавая тем самым компьютерный программный продукт, т.е. изделие производства, в соответствии с изобретением. Машиночитаемые носители могут представлять собой, например, дисковод на фиксированных (жестких) дисках, дискету, оптический диск, магнитную ленту, полупроводниковое запоминающее устройство, такое как постоянное запоминающее устройство (ПЗУ), и т.д., или любую принимающую и/или передающую среду, такую как Internet либо другую сеть связи, или линию связи. Изделие производства, содержащее компьютерный код, может быть изготовлено и/или использовано путем выполнения операций в соответствии с кодом непосредственно с одного носителя, путем копирования кода с одного носителя на другой носитель или путем передачи кода через сеть.
Специалист в области вычислительной техники легко сможет объединить вышеописанные программные средства с подходящими аппаратными средствами компьютера общего назначения или специального назначения, такими как процессор, для создания компьютерной системы или компьютерной подсистемы, воплощающей способ согласно изобретению. Устройство для изготовления, использования или продажи изобретения может представлять собой одну или более обрабатывающих систем, включая, но не ограничиваясь, центральный процессор (ЦП), память, запоминающие устройства, линии и устройства связи, серверы, устройства ввода-вывода, или любые подкомпоненты одной или более обрабатывающих систем, включая программные средства, аппаратно-программные средства, аппаратные средства или любую их комбинацию или подмножество, которые воплощают изобретение.
Хотя выше проиллюстрированы и описаны различные варианты осуществления настоящего изобретения, очевидно, что такие варианты осуществления представлены лишь в качестве примера. Для специалистов в данной области техники будет ясно, что в рамках объема притязаний описываемого здесь изобретения возможны многочисленные варианты, изменения и дополнения. Например, описанные здесь способ и систему можно применить к любой транспортной системе, содержащей элементы, взаимно соединенные тормозной магистралью, несущей текучую среду, и системой связи для обмена информацией между управляющим элементом системы и управляемыми элементами системы, такими как поезд, полугрузовик с прицепами, и т.д. Кроме того, система связи может быть проводной, беспроводной, спутниковой, электронной, инфракрасной, и т.д., системой для передачи и приема команд, включая команды торможения. Соответственно следует считать, что изобретение ограничивается лишь сущностью и объемом прилагаемой формулы изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 - система
12 - отдаленный локомотив
14 - тормозная магистраль
16 - контроллер
18 - система управления торможением
20 - клапан тормозной магистрали
22 - датчик потока текучей среды
24 - система беспроводной связи
26 - сигнал потока текучей среды
28 - сигнал статуса работоспособности связи
30 - система дроссельного управления
32 - датчик давления текучей среды
34 - линия связи
36 - сигнал давления текучей среды
Изобретение относится к области управления локомотивами. Предложены способ и система распространения команды торможения посредством тормозной магистрали по переносящей текучую среду тормозной магистрали (14). Транспортная система содержит систему (24) связи для обмена информацией между управляющим элементом системы и управляемыми элементами системы, при котором определяют неожиданное состояние потока текучей среды в тормозной магистрали в первом управляемом элементе (12) транспортной системы, не совпадающее с передаваемой по системе связи командой торможения, выданной управляющим элементом транспортной системы. Способ также предусматривает лишение первого управляемого элемента возможности управления потоком в тормозной системе, вследствие чего команда торможения посредством тормозной магистрали, выданная управляющим элементом, распространяется по тормозной магистрали ко второму управляемому элементу транспортной системы, расположенному позади первого управляемого элемента, с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого управляемого элемента. Достигается уменьшение тормозных путей и сил, действующих на поезд. 4 н. и 23 з.п. ф-лы, 1 ил.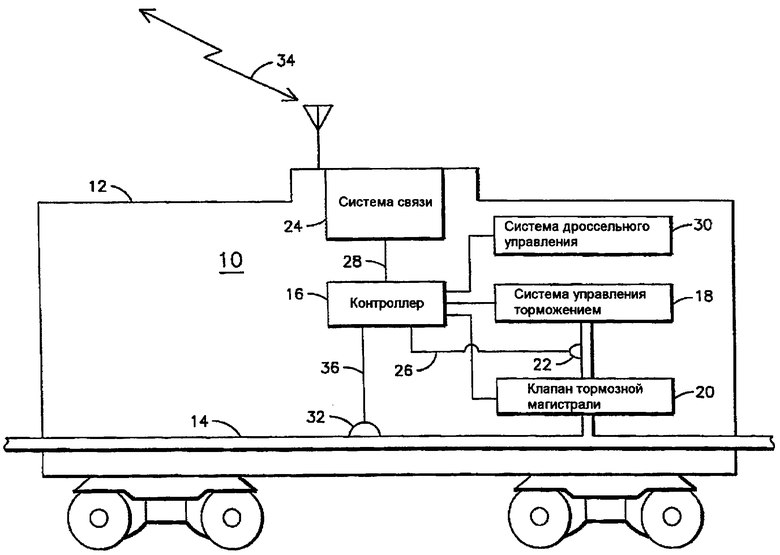
1. Способ распространения команды торможения в железнодорожном поезде, содержащем тормозную магистраль, переносящую текучую среду и соединяющую головной локомотив и множество отдаленных локомотивов, и дополнительно содержащем систему связи для использования головным локомотивом с целью выдачи передаваемых по системе связи команд в отдаленные локомотивы, причем головной локомотив и отдаленные локомотивы содержат систему управления торможением, сообщающуюся по текучей среде с тормозной магистралью через клапан тормозной магистрали, при этом система управления торможением в каждом из головного и отдаленных локомотивов выполнена с возможностью управления потоком текучей среды в тормозной магистрали, причем команду торможения распространяют посредством тормозной магистрали в зависимости от операции торможения головного локомотива по тормозной магистрали от первого отдаленного локомотива ко второму отдаленному локомотиву, расположенному позади первого отдаленного локомотива, при этом способ включает: определение неожиданного состояния потока текучей среды в тормозной магистрали в первом отдаленном локомотиве, не совпадающего с передаваемой по системе связи командой торможения, выданной головным локомотивом и последней принятой первым отдаленным локомотивом, и лишение первого отдаленного локомотива возможности управления потоком в тормозной системе, вследствие чего команда торможения посредством тормозной магистрали в зависимости от операции торможения головного локомотива распространяется по тормозной магистрали ко второму отдаленному локомотиву с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого отдаленного локомотива.
2. Способ по п.1, в котором лишение возможности включает в себя закрывание клапана тормозной магистрали первого отдаленного локомотива.
3. Способ по п.1, дополнительно включающий уменьшение величины тяги первого отдаленного локомотива.
4. Способ по п.3, в котором уменьшение величины тяги включает в себя задание величины тяги первого отдаленного локомотива в соответствии с состоянием холостого хода, вследствие чего первый отдаленный локомотив не обеспечивает движущую силу поезду.
5. Способ по п.3, дополнительно включающий лишение первого отдаленного локомотива возможности реагировать на передаваемые по системе связи команды управления тягой, выданные головным локомотивом.
6. Способ по п.3, дополнительно включающий осуществление в первом отдаленном локомотиве проверки связи по системе связи с головным локомотивом после лишения первого отдаленного локомотива возможности управления потоком в тормозной системе.
7. Способ по п.6, дополнительно включающий продолжение обеспечения первому отдаленному локомотиву возможности реагирования на передаваемые по системе связи команды управления тягой, выданные головным локомотивом, если первый отдаленный локомотив ранее был лишен возможности реагировать на команды тяги, когда проверка связи указывает работоспособную связь с головным локомотивом.
8. Способ по п.6, дополнительно включающий повторное обеспечение первому отдаленному локомотиву возможности управления потоком в тормозной системе после приема первым отдаленным локомотивом передаваемой по системе связи команды отпускания тормозов из головного локомотива, если проверка связи указывает работоспособную связь с головным локомотивом.
9. Способ по п.8, в котором повторное обеспечение возможности откладывают до тех пор, пока после приема команды отпускания тормозов первым отдаленным локомотивом этот первый отдаленный локомотив не определит заданный рост давления в тормозной магистрали.
10. Способ по п.6, дополнительно включающий продолжение обеспечения первому отдаленному локомотиву возможности реагирования на передаваемые по системе связи команды управления тягой, выданные первым локомотивом, если проверка связи указывает работоспособную связь с головным локомотивом, а первый отдаленный локомотив находится в состоянии торможения, когда определено неожиданное состояние потока текучей среды.
11. Способ по п.10, дополнительно включающий повторное обеспечение первому отдаленному локомотиву возможности управления потоком в тормозной магистрали.
12. Способ по п.6, дополнительно включающий повторное обеспечение первому отдаленному локомотиву возможности управления потоком в тормозной магистрали после приема передаваемой по системе связи команды отпускания тормозов первым отдаленным локомотивом, если проверка связи указывает работоспособную связь с головным локомотивом, а первый отдаленный локомотив находится в состоянии отпускания тормозов, когда определено неожиданное состояние потока текучей среды.
13. Способ распространения команды торможения в железнодорожном поезде, содержащем тормозную магистраль, переносящую текучую среду и соединяющую головной локомотив и множество отдаленных локомотивов, и дополнительно содержащем систему связи для использования головным локомотивом с целью выдачи передаваемых по системе связи команд в отдаленные локомотивы, причем головной локомотив и отдаленные локомотивы содержат систему управления торможением, сообщающуюся по текучей среде с тормозной магистралью через клапан тормозной магистрали, при этом система управления торможением в каждом из головного и отдаленных локомотивов выполнена с возможностью управления потоком текучей среды в тормозной магистрали, причем команду торможения распространяют посредством тормозной магистрали в зависимости от операции торможения головного локомотива по тормозной магистрали от первого отдаленного локомотива ко второму отдаленному локомотиву, расположенному позади первого отдаленного локомотива, при этом способ включает: определение неожиданного состояния потока текучей среды в тормозной магистрали в первом отдаленном локомотиве, не совпадающего с передаваемой по системе связи командой торможения, выданной головным локомотивом и последней принятой первым отдаленным локомотивом, если тормоза первого отдаленного локомотива находятся в состоянии отпускания, осуществление в первом отдаленном локомотиве проверки связи по системе связи с головным локомотивом, и осуществление торможения первого отдаленного локомотива, если проверка связи указывает потерю связи с головным локомотивом, а измеренное давление тормозной магистрали в отдаленном локомотиве падает ниже заданного уровня в течение заданного интервала времени.
14. Способ по п.13, дополнительно включающий лишение первого отдаленного локомотива возможности управления потоком в тормозной системе, вследствие чего команда торможения посредством тормозной системы в зависимости от операции торможения головного локомотива распространяется по тормозной системе ко второму отдаленному локомотиву с уменьшенными помехами потоку текучей среды в тормозной системе, идущими от первого отдаленного локомотива.
15. Способ по п.14, в котором лишение возможности включает в себя закрывание клапана тормозной магистрали первого отдаленного локомотива.
16. Способ по п.13, дополнительно включающий уменьшение величины тяги первого отдаленного локомотива.
17. Способ по п.16, в котором уменьшение величины тяги включает в себя задание величины тяги первого отдаленного локомотива в соответствии с состоянием холостого хода, вследствие чего первый отдаленный локомотив не обеспечивает движущую силу поезду.
18. Способ по п.13, в котором уменьшают величину тяги первого отдаленного локомотива, если измеренное давление тормозной магистрали остается в заданных пределах в течение заданного периода времени.
19. Способ по п.18, дополнительно включающий лишение первого отдаленного локомотива возможности управления потоком в тормозной системе, вследствие чего команда торможения посредством тормозной магистрали в зависимости от операции торможения головного локомотива распространяется по тормозной магистрали ко второму отдаленному локомотиву с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого отдаленного локомотива.
20. Система для распространения команды торможения в железнодорожном поезде, содержащем тормозную магистраль, переносящую текучую среду и соединяющую головной локомотив и множество отдаленных локомотивов, и дополнительно содержащем систему связи для использования головным локомотивом с целью выдачи передаваемых по системе связи команд в отдаленные локомотивы, причем головной локомотив и отдаленные локомотивы содержат систему управления торможением, сообщающуюся по текучей среде с тормозной магистралью через клапан тормозной магистрали, при этом система управления торможением в каждом из головного и отдаленных локомотивов выполнена с возможностью управления потоком текучей среды в тормозной магистрали, причем команду торможения распространяют посредством тормозной магистрали в зависимости от операции торможения головного локомотива, по тормозной магистрали от первого отдаленного локомотива ко второму отдаленному локомотиву, расположенному позади первого отдаленного локомотива, при этом система содержит: датчик состояния потока текучей среды в первом отдаленном локомотиве для определения состояния потока текучей среды в тормозной магистрали в первом отдаленном локомотиве и для выдачи сигнала состояния потока текучей среды, характеризующего определенное состояние текучей среды, клапан тормозной магистрали, выполненный с возможностью лишения первого отдаленного локомотива возможности управления состоянием потока текучей среды, и контроллер для обеспечения работы клапана тормозной магистрали в зависимости от сигнала состояния потока текучей среды, характеризующего команду торможения посредством тормозной магистрали, для лишения первого отдаленного локомотива возможности управления состоянием потока текучей среды в тормозной магистрали, вследствие чего указание торможения посредством тормозной магистрали распространяется по тормозной магистрали ко второму отдаленному локомотиву, расположенному позади первого отдаленного локомотива, с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого отдаленного локомотива.
21. Система по п.20, в которой система связи выполнена с возможностью выдачи сигнала статуса, характеризующего работоспособность системы связи, в контроллер.
22. Система по п.20, в которой контроллер дополнительно выполнен с возможностью снижения величины тяги локомотива в зависимости от команды торможения посредством тормозной магистрали.
23. Система по п.20, в которой контроллер дополнительно выполнен с возможностью лишения первого отдаленного локомотива возможности реагирования на передаваемые по системе связи команды управления тягой, выданные головным локомотивом, в зависимости от указания торможения посредством тормозной магистрали.
24. Система по п.20, в которой контроллер дополнительно выполнен с возможностью обеспечения работы клапана тормозной магистрали для отключения первого отдаленного локомотива перед определением работоспособности системы связи.
25. Система по п.20, в которой датчик состояния потока текучей среды представляет собой датчик потока, выдающий сигнал состояния потока текучей среды, характеризующий измеренный поток текучей среды в тормозной магистрали.
26. Система по п.20, в которой датчик состояния потока текучей среды представляет собой датчик давления, выдающий сигнал состояния потока текучей среды, характеризующий измеренное давление текучей среды в тормозной магистрали.
27. Способ распространения команды торможения посредством тормозной магистрали по переносящей текучую среду тормозной магистрали, взаимно соединяющей элементы транспортной системы, причем транспортная система содержит систему связи для обмена информацией между управляющим элементом системы и управляемыми элементами системы, при этом способ включает: определение неожиданного состояния потока текучей среды в тормозной магистрали в первом управляемом элементе транспортной системы, несовпадающего с передаваемой по системе связи командой торможения, выданной управляющим элементом транспортной системы, и лишение первого управляемого элемента возможности управления потоком в тормозной магистрали, вследствие чего команда торможения посредством тормозной магистрали, выданная управляющим элементом, распространяется по тормозной магистрали ко второму управляемому элементу транспортной системы, расположенному позади первого управляемого элемента, с уменьшенными помехами потоку текучей среды в тормозной магистрали, идущими от первого управляемого элемента.
| Устройство для управления тормозами поезда | 1970 |
|
SU473627A1 |
| RU 95102181 A1, 27.09.1996 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ | 1999 |
|
RU2238199C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6435623 B1, 20.08.2002. | |||

