Изобретение относится к способам обработки экспериментальных данных и может быть использовано для восстановления параметров фактической (опытной) траектории на атмосферном участке полета при проведении летных испытаний летательного аппарата (ЛА).
Известен «Способ обработки информации о перемещении летательного аппарата» (Патент РФ №2436047, А.И. Клименко, А.А. Клименко, А.В. Абакумов, Е.Н. Скрипаль, Р.В. Ермаков, Л.А. Филиппов, МПК G01C 23/00 (2006.01), опубл. 10.12.2011 г., Бюл. №34), который включает операции, связанные с получением информации об основных параметрах навигации: от инерциальной навигационной системы (ИНС), состоящей из функционирующих в режиме регистрации информации по меньшей мере одного трехосевого акселерометра, по меньшей мере одного трехосевого датчика угловой скорости, по меньшей мере одного трехосевого магнитометра и от спутниковой навигационной системы (СНС). Комплексирование данных СНС осуществляют с возможностью корректировки параметров навигации и ошибок, накапливающихся при функционировании инерциальных навигационных систем. При этом маркируют выбранную траекторию перемещения ЛА точками его возможного нахождения, находящимися друг относительно друга в пространстве на расстоянии, равном заранее заданной величине. Реальные координаты положения ЛА определяют с использованием данных от ИНС и СНС в дискретные моменты времени, значения которых зависят от динамики и направления угловых скоростей ЛА. Данный способ выбран в качестве прототипа.
Известный способ предназначен для восстановления траектории ЛА в процессе полета, техническим результатом способа является повышение эффективности обработки информации путем обеспечения определения и восстановления траектории ЛА. Однако данный способ не обеспечивает высокоточного определения фактических (опытных) значений вектора скорости и параметров ориентации на атмосферном участке полета при проведении летных испытаний управляемых ЛА, что необходимо для подтверждения правильности функционирования бортовых систем навигации и управления, определения экспериментальных значений аэродинамических характеристик (АДХ) корпуса и органов управления ЛА, уточнения его тактико-технических характеристик.
Технической задачей, на решение которой направлено заявляемое изобретение, является обеспечение высокой точности определения фактических параметров поступательного и вращательного движения летательного аппарата на атмосферном участке полета.
Указанный технический результат достигается за счет того, что в заявляемом способе восстановления параметров траектории ЛА, включающем получение информации о движении ЛА от бортовой инерциальной навигационной системы на всем атмосферном участке полета ЛА и информации об основных параметрах навигации от бортовой аппаратуры спутниковой навигации (БАСН), обработку полученных данных от ИНС и БАСН и определение параметров движения ЛА, в отличие от прототипа, дополнительно получают информацию об основных параметрах навигации от БАСН на доплазменном и не менее чем в двух точках на послеплазменном участке полета ЛА, информацию от ИНС и БАСН получают телеметрически и проводят ее обработку апостериорно. В ходе обработки параметров движения ЛА с использованием информации ИНС и информации о параметрах движения навигационных спутников (НС) производят определение расчетных радиальных скоростей и дальностей ЛА относительно НС; формируют массивы данных об измеренных и расчетных значениях радиальных скоростей и дальностей ЛА относительно НС и с использованием данных о координатах точки падения и моменте встречи ЛА с земной поверхностью, определяют поправки, согласующие измеренные и расчетные данные о значениях радиальных скоростей и дальностей, восстанавливают параметры движения с учетом полученных поправок.
Обеспечение высокой точности определения фактических параметров поступательного и вращательного движения летательного аппарата на атмосферном участке полета достигается за счет использования всей совокупности признаков заявляемого способа.
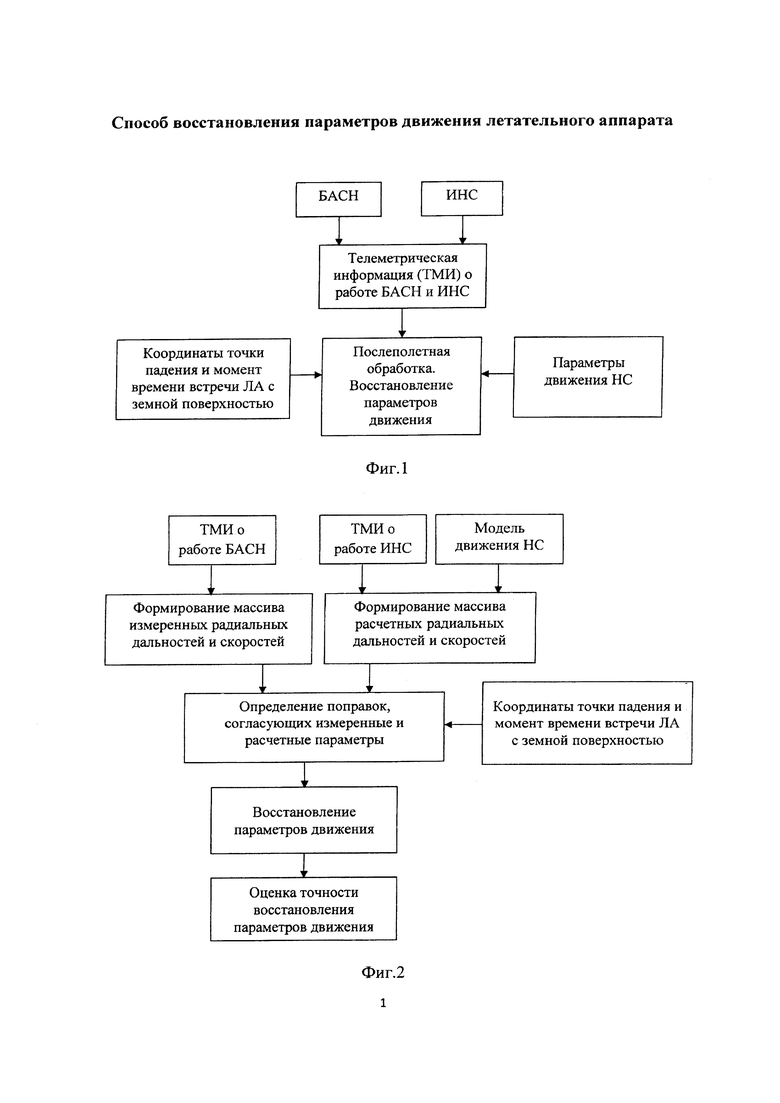
На фиг. 1 показан алгоритм реализации заявляемого способа обработки; на фиг. 2 - алгоритм обработки информации в соответствии с заявляемым способом, полученной в ходе осуществлении заявляемого способа при помощи математических моделей ИНС и БАСН, а также комплексной модели движения управляемого ЛА при проведении летных испытаний летательного аппарата.
Способ восстановления параметров движения летательного аппарата реализуется следующим образом.
В процессе полета ЛА телеметрически получают информацию:
- данные о параметрах движения (поступательного и вращательного) на атмосферном участке полета летательного аппарата от бортовой ИНС, состоящей из по крайней мере одного трехосевого акселерометра (либо трех одноосевых акселерометров) и по крайней мере одного трехосевого датчика угловой скорости (либо трех одноосевых датчиков угловой скорости), функционирующих в режиме регистрации информации на всем атмосферном участке полета ЛА:
- координаты положения, составляющие вектора скорости и параметры ориентации ЛА в инерциальной геоцентрической системе координат (ИГСК);
- проекции кажущихся скоростей и приращений углов поворотов на измерительные оси трехосевого датчика угловой скорости (ДУС) (либо трех одноосевых датчиков угловой скорости) и измерительные оси трехосевого акселерометра (либо трех одноосевых акселерометров) (АКС) из состава ИНС, измеряемые в каждом цикле навигационных определений;
- информацию об основных параметрах навигации от БАСН на доплазменном и не менее чем в двух точках на послеплазменном участке траектории полета ЛА:
- измеренные значения радиальных скоростей и дальностей до видимых НС;
- моменты измерений радиальных скоростей и дальностей;
- номера навигационных спутников, относительно которых получены измерения радиальных скоростей и дальностей.
После проведения испытаний ЛА из архива Информационно-аналитического центра координатно-временного и навигационного обеспечения (ИАЦ КВНО) ЦНИИмаш получают информацию о:
- параметрах движения навигационных спутников в гринвичской геоцентрической системе координат, относительно которых получены измерения радиальных скоростей и дальностей.
Обработку полученных данных от ИНС и БАСН проводят апостериорно, при этом в ходе обработки параметров траектории ЛА производят определение расчетных радиальных скоростей и дальностей ЛА относительно НС, формируют массивы данных об измеренных и расчетных значениях радиальных скоростей и дальностей.
С использованием полученных данных, данных о координатах точки падения и данных о моменте встречи ЛА с земной поверхностью, полученных с помощью средств контроля, методом наименьших квадратов определяют поправки, согласующие измеренные и расчетные данные о значениях радиальных скоростей и дальностей (поправки к начальным условиям поступательного и вращательного движения), к показаниям акселерометра, а также поправку на рассогласование шкалы времени БАСН и системной шкалы времени навигационных спутников, восстанавливают параметры движения с учетом полученных поправок, то есть для восстановления параметров траектории определяют поправки, согласующие навигационные определения ИНС с результатами траекторных измерений БАСН, включая поправки к начальным условиям поступательного и вращательного движения, к показаниям акселерометра, а также поправку на рассогласование шкалы времени БАСН и системной шкалы времени НС.
Состав поправок ограничивают наиболее значимыми для восстановления опытной траектории и включают поправки в начальные условия для решения навигационной задачи в соответствии с алгоритмом работы ИНС, в том числе: три поправки в координаты положения; три поправки в составляющие вектора скорости; три поправки в параметры ориентации.
Поправки должны минимизировать функционал вида:
 ,
,
при условии, что A⋅X=b,
где X - вектор искомых поправок;
M - матрица коэффициентов влияния поправок на изменения величин отклонений квадратов радиальных дальностей (S2) до видимых НС и скалярных произведений радиальных дальностей и скоростей (S-W);
B - вектор, элементами которого являются взвешенные разности расчетных и измеренных значений:
- квадратов радиальных дальностей S;
- скалярных произведений радиальных дальностей S и скоростей W;
A - матрица коэффициентов влияния элементов вектора X на отклонения координат конечной точки траектории (точки падения ЛА);
b - вектор, содержащий отклонения координат фактической точки падения от точки прицеливания.
Искомое решение определяется из уравнений:
 ,
,
 .
.
Дополнительно могут быть определены характеристики точности восстановления параметров движения ЛА, так же как ошибки определения поправок (с учетом и без учета идентифицированного вектора поправок), обусловленные совместным влиянием всех погрешностей ИНС, и восстановлены параметры движения с использованием расширенного вектора поправок (три поправки в координаты положения; три поправки в составляющие вектора скорости; три поправки в параметры ориентации; одна поправка в аддитивную погрешность акселерометра; две поправки в мультипликативные составляющие погрешности акселерометра).
Наибольшая точность восстановления параметров движения достигается на завершающем этапе послеполетной обработки телеметрической информации - при интегрировании уравнений движения с использованием измерений приращений кажущихся скоростей и углов поворота ЛА с учетом полученных поправок к начальным условиям и результатам измерений акселерометра. Учет указанных поправок позволяет повысить точность определения координат положения ЛА до единиц метров.
Заявляемый способ восстановления параметров движения летательного аппарата был проверен при помощи математической модели ИНС и БАСН, а также комплексной модели движения управляемого ЛА (см. фиг. 2). Проверка показала работоспособность заявляемого способа и достижение заданной точности восстановления траектории движения ЛА.
Таким образом, заявляемый способ обеспечивает высокоточное определение фактических (опытных) параметров поступательного и вращательного движения ЛА на атмосферном участке траектории полета, при условии наличия полной телеметрической информации о работе бортовой ИНС на всем атмосферном участке и информации от БАСН на доплазменном и не менее чем в двух точках на послеплазменном участке траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
Изобретение относится к области авиационного приборостроения и может найти применение для восстановления фактических (опытных) параметров движения при проведении летных испытаний летательного аппарата (ЛА). Технический результат – расширение функциональных возможностей. Для этого на основе телеметрической информации о работе бортовой инерциальной навигационной системы (ИНС) и бортовой аппаратуры спутниковой навигации (БАСН), а также данных о координатах точки падения ЛА и моменте встречи ЛА с земной поверхностью апостериорно определяют поправки, согласующие измеренные и расчетные данные, на основании которых восстанавливают параметры движения (поступательного и вращательного) на атмосферном участке полета ЛА. При этом обеспечивают высокоточное определение фактических (опытных) параметров (поступательного и вращательного) движения атмосферного участка траектории полета. 2 ил.
Способ восстановления параметров движения летательного аппарата (ЛА), включающий получение информации от бортовой инерциальной навигационной системы (ИНС) на всем атмосферном участке полета ЛА и информации об основных параметрах навигации от бортовой аппаратуры спутниковой навигации (БАСН), обработку полученных данных от ИНС и БАСН и определение параметров движения ЛА, отличающийся тем, что информацию об основных параметрах навигации от БАСН получают на доплазменном и не менее чем в двух точках на послеплазменном участке полета ЛА, информацию от ИНС и БАСН получают телеметрически и проводят ее обработку апостериорно, в ходе обработки параметров движения ЛА с использованием информации ИНС и информации о параметрах движения навигационных спутников (НС) производят определение расчетных радиальных скоростей и дальностей ЛА относительно НС, формируют массивы данных об измеренных и расчетных значениях радиальных скоростей и дальностей ЛА относительно НС, и с использованием данных о координатах точки падения и моменте встречи ЛА с земной поверхностью определяют поправки, согласующие измеренные и расчетные данные о значениях радиальных скоростей и дальностей, восстанавливают параметры движения с учетом полученных поправок.
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |
| US 6041280 A, 21.03.2000. | |||

