Область техники
Настоящее изобретение относится к акселерометрам, в частности к трехосевому кристаллическому акселерометру в едином блоке, выполненному с возможностью изменения оси чувствительности датчика в любом данном направлении.
Предшествующий уровень техники
Навигационные приборы, использующие акселерометр, используются в различных условиях. Например, в приборах для разведки нефтяных скважин обычно используют три независимых одноосевых датчика для определения ускорения. Недостаток одноосевых датчиков заключается в том, что они занимают значительное место в разведочном инструменте. При этом большинство известных одноосевых датчиков являются сервоакселерометрами уравновешенных сил, в которых используется магнитно-восстанавливаемая проверочная масса, которая оказывает магнитное влияние на окружающую среду. Инерциальные навигационные приборы также содержат магнитометры. Для потенциального взаимодействия между имеющими сильную намагниченность акселерометрами и магнитометрами требуется, чтобы акселерометры находились на минимальном расстоянии от магнитометров. Ранее в датчиках использовались резонаторы на кристалле кварца, и они предлагались для применения в трехосевых акселерометрах (см., например, патент США №6826960). Трехосевой акселерометр согласно указанному патенту представляет собой статическую систему, которая не обеспечивает чувствительность и не обеспечивает возможность переменной чувствительности в каком-либо одном или более направлениях без обязательного модифицирования размера или формы отдельных кристаллов.
Сущность изобретения
Технической задачей настоящего изобретения является создание усовершенствованного трехосевого акселерометра, имеющего переменную осевую чувствительность и в котором может быть использована стандартная опорная система, т.е. опорный кристалл.
В предпочтительном варианте осуществления изобретения предложен датчик для измерения ускорения в трех измерениях, содержащий инерциальную массу и опорную систему для инерциальной массы, причем опорная система имеет основание и множество опорных элементов, проходящих между основанием и инерциальной массой, подвешивая инерциальную массу в ортогональных направлениях и обеспечивая статически неопределенную конструкцию, и датчики напряжений для измерения, вызванного ускорением напряжения в опорных элементах, тем самым обеспечивая параметр ускорения массы.
Согласно еще одному варианту осуществления предложен акселерометр, содержащий инерциальную массу и опорную систему для инерциальной массы, причем опорная система имеет основание и множество опорных элементов, проходящих между основанием и инерциальной массой, подвешивая инерциальную массу в ортогональных направлениях и обеспечивая статически неопределенную конструкцию, и по меньшей мере шесть опорных элементов, образующих соответствующие датчики напряжений для измерения обусловленного ускорением напряжения в опорных элементах для определения параметра ускорения массы.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
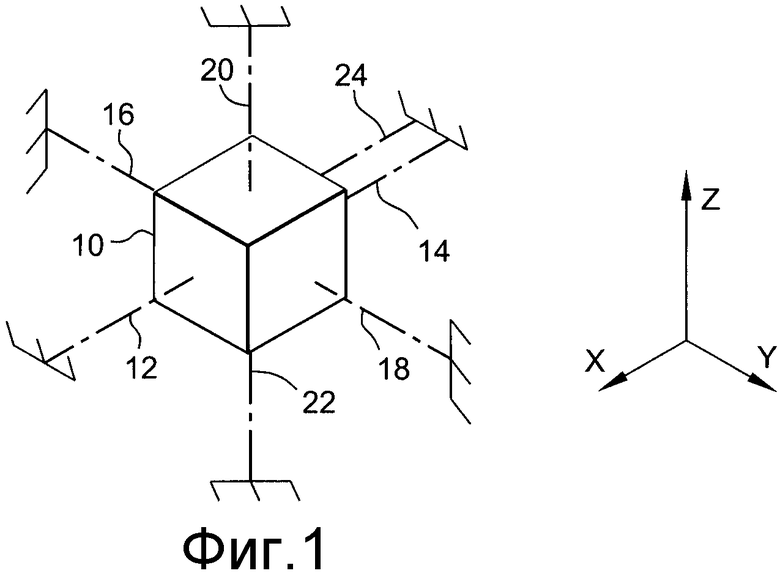
фиг.1 изображает проверочную массу, опирающуюся на датчики в ортогональных направлениях, обеспечивая статически неопределенную конструкцию согласно изобретению;
фиг.2 - модуль акселерометра, показаны инерциальная масса, датчик, неподвижная опора и упоры статически неопределенной конструкции согласно изобретению;
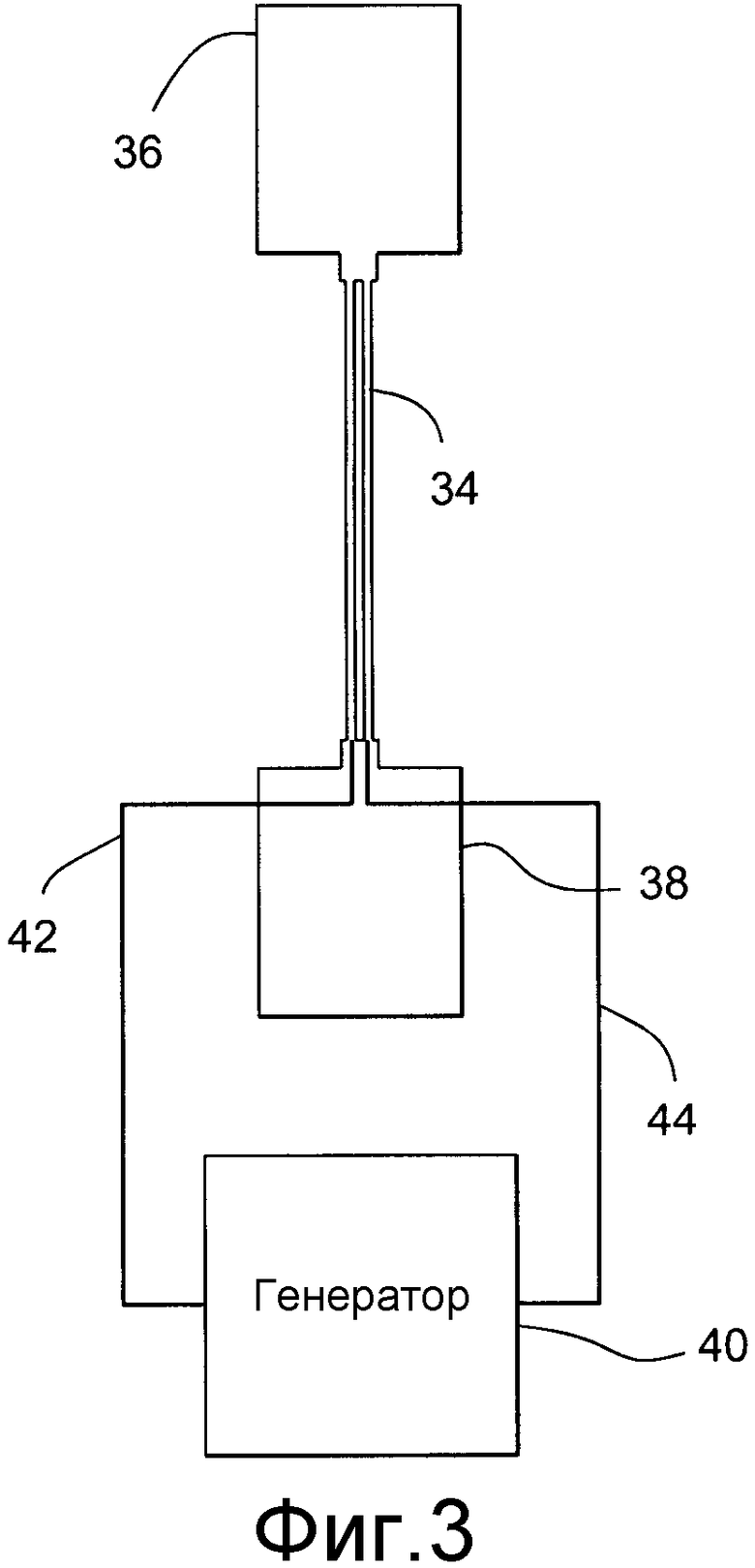
Фиг.3 - двухпучковый двухконечный камертон на кварцевом кристалле, используемый в качестве опоры/датчика согласно изобретению;
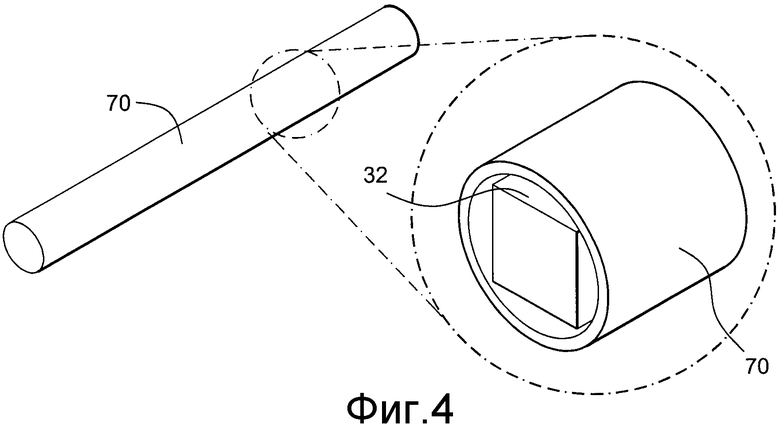
фиг.4 - инструмент для разведки бурением нефтяной скважины, в котором используется трехосевой акселерометр, согласно изобретению;
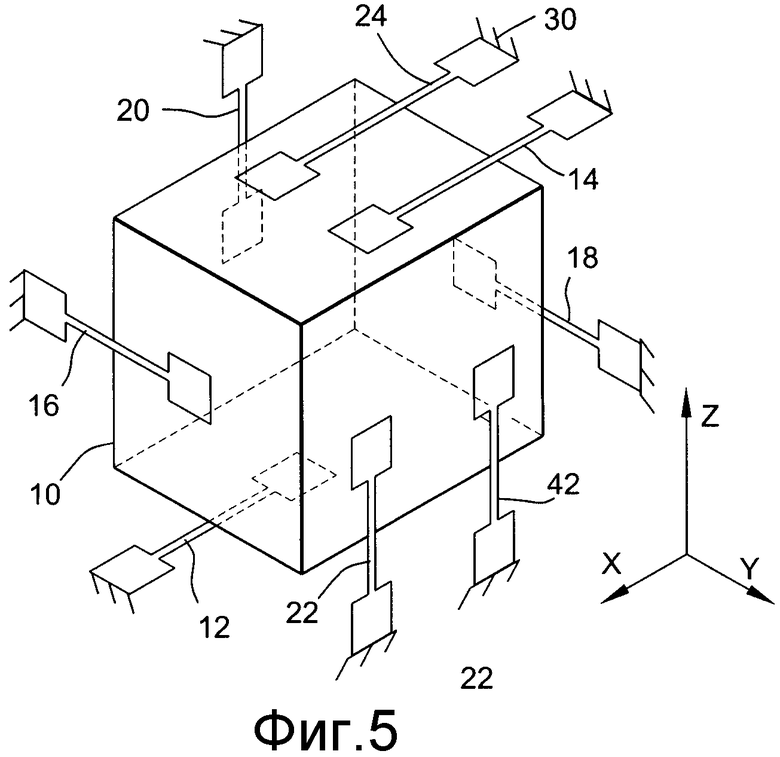
фиг.5-8 - разные варианты осуществления изобретения, показаны опоры для инерциальной массы в разных статически неопределенных конструкциях согласно изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1 схематически показана инерциальная масса 10 в виде куба. Масса 10 может иметь любую геометрическую конфигурацию. Масса 10 опирается на шесть ортогонально расположенных опор 12, 14; 16, 18 и 20, 22. Также имеется дополнительная опора 24. Противоположные концы каждой опоры прикреплены к массе 10 и к неподвижному опорному основанию, которое, например, может содержать корпус для акселерометра. Расположение опор 12, 14; 16, 18; 20, 22 совпадает с соответствующими осями X, Y, Z системы прямоугольных координат. Опорная система для массы 10 имеет семь опор и поэтому образует статически неопределенную опорную систему. В частности, если масса 10 опирается только на шесть опор 12, 14; 16, 18; 20, 22, то статическая опорная система является статически определенной опорной конструкцией. Какая-либо система является статически неопределенной конструкцией, если число неизвестных сил равно числу уравнений движения, необходимых для описания движения массы в свободном пространстве. То есть, опоры или ограничители равны числу и типам степеней свободы и являются независимыми. Поэтому в статически определенной системе можно определить все осевые усилия в опорах и все противодействия на опорах путем решения уравнений равновесия.
Наоборот, какая-либо опорная система является статически неопределенной в соответствии с настоящим изобретением, когда число ограничителей превышает число, требуемое для обеспечения независимой статически определенной конструкции, т.е. число имеющихся опор превышает их число, требуемое для независимого уравновешивания внешних нагрузок. Другими словами, система является статически неопределенной, если число ограничителей превышает число степеней свободы и имеется по меньшей мере один ограничитель для каждой степени свободы, например возвратно-поступательное перемещение по отношению к осям X, Y, Z и вращение вокруг этих осей. Для решения динамики статически неопределенной конструкции, помимо решения уравнений статического равновесия, также требуется знание данных о свойствах опорной системы.
Следует отметить, что опорная система для массы 10 (фиг.1) с шестью опорами 12, 14; 16, 18; 20, 22, расположенными взаимно ортогонально, образует статически определенную опорную систему. Указанная опорная система, имеющая семь опор, включая дополнительную опору 24, образует статически неопределенную опорную систему. То есть, имеется по меньшей мере одна дополнительная опора, помимо нужных, для независимого равновесия внешних нагрузок. Статически неопределенная система также содержит большее число дополнительных опор, чем одна дополнительная опора (фиг.1), и ее можно охарактеризовать как статически определенную опорную систему по меньшей мере с одной или более дополнительными опорами.
В одном из вариантов настоящего изобретения предложена опорная система для инерциальной массы, имеющей опоры, проходящие между неподвижным основанием и инерциальной массой в ортогональных направлениях в статически неопределенной опорной конструкции. Например, на фиг.2 более подробно показана та же опорная система с семью опорами, как и на фиг.1, но каждая опора может содержать любое число разных датчиков, чувствительных к усилию. Например, можно использовать устройства определения напряжения, такие как тензометры. Еще один пример, можно использовать однопучковые резонаторные системы, как показано на фиг.3А патента США 6826960. Предпочтительно, чтобы двухпучковые двухконечные камертоны имели опору/датчик между массой 10 и неподвижным основанием, возможно содержащим корпус 30 для модуля 32 акселерометра. Пример двухпучкового двухконечного камертона 34 показан на фиг.3. Монтажные площадки 36 и 38 размещены на противоположных концах чувствительной к усилию опоре/датчике двухпучкового двухконечного камертона. Генератор 40 электрически соединен выводными линиями 42 и 44 с электрическими соединениями на площадке 38, в результате чего генератор обеспечивает электрическую энергию для колебаний пучков датчика 34. Следовательно, двойные пучки опорной конструкции подвергаются растяжению или сжатию при противодействии линейным силам и угловому вращению, обусловленным ускорением массы 10, при этом частоты колебаний изменяются при изменении нагрузки и поэтому пропорциональны ускорению, т.е. являются параметром ускорения. Для обеспечения выходного сигнала, пропорционального ускорению, аналогичным образом можно использовать тензометры.
Чувствительные к усилию опоры 12 (фиг.2), 14, 24, 16, 18, 20, 22, схематически показанные на фиг.1, в предпочтительном варианте осуществления образуют соответствующие чувствительные к усилию двухпучковые двухконечные камертоны 34, соединенные между массой 10 и неподвижным основанием 30. На фиг.2 одна из монтажных площадок, например площадка 36, на каждой опоре/датчике 34 прикреплена к инерциальной массе 10, при этом противоположная монтажная площадка 38 прикреплена к неподвижному основанию 30. В частности, опоры/датчики 12, 14 обеспечивают опору в направлении Х; опоры/датчики 16, 18 обеспечивают опору в направлении Y; и опоры/датчики 20, 22 обеспечивают опору в направлении Z. Дополнительная опора/датчик 24 обеспечивает дополнительную опору в направлении Х и поэтому дополнительную жесткость в направлении Х. Эта дополнительная опора делает опорную систему статически неопределенной. Как отмечено ниже, в статически определяющие опорные системы можно ввести одну или более дополнительных опор, чтобы опорные системы стали статически неопределенными.
Следует отметить, что дополнительная опора не обязательно должна образовывать чувствительную к нагрузке опору. Поэтому для обеспечения статически неопределенной конструкции в данном акселерометре минимально требуется одна чувствительная к нагрузке опора для каждой степени свободы, совместно с одной или более дополнительными опорами. Каждая дополнительная опора может быть или не быть чувствительной к нагрузке, например одна или более дополнительных опор могут быть полностью конструктивными.
На фиг.2 показаны шесть упоров 40. Упоры показаны парами в каждом из шести ортогональных направлений. Упоры 40 выполнены на основании 30 и ограничивают расстояние перемещения инерциальной массы в ортогональных направлениях за пределы функциональных возможностей датчиков напряжений для измерения обусловленного ускорением напряжения в опорных элементах. Следует отметить, что расположение и количество упоров на шести сторонах могут изменяться, например четыре на углах или шесть (четыре по углам и два посередине), указанное расположение приведено только в качестве примера.
Статически неопределенная опорная конструкция для инерциальной массы 10 обеспечивает возможность изменения чувствительности акселерометра в любом заданном направлении(ях). За счет присутствия статически неопределенных опор жесткость акселерометра по отношению к опорному основанию 30 можно увеличить в любом направлении или направлениях. Благодаря этому обеспечивается повышение естественной частоты опорной системы, что очень желательно, например, в условиях низкой вибрации инструментов при разведке нефтяных скважин. Для разведочного оборудования для нефти требуется, чтобы естественная частота акселерометра превышала около 1500 Гц. В этом варианте воплощения дополнительная опора/датчик 24 находится в направлении Х, параллельном оси Х, и поэтому обеспечивает в этом направлении повышенную жесткость. Следовательно, в случае статически неопределенной конструкции конкретная чувствительность в одном или более направлениях для обеспечения изменения чувствительности по любой оси создается за счет введения одного или более дополнительных опор/датчиков, например двухпучковых двухконечных камертонов на заданной стороне или сторонах массы. При этом достигается дополнительное преимущество, заключающееся в том, что опоры/датчики будут использовать один основной двухпучковый резонатор, а для изготовления акселерометра не придется изготавливать несколько размеров двухпучковых резонаторов, что приведет к повышению их себестоимости.
Следует отметить, что статически неопределенную опорную систему можно скомпоновать в различных конфигурациях, с установкой инерциальной массы на неподвижном основании (фиг.5-8). При этом статически неопределенные опорные системы следует рассматривать только как характерные примеры. В зависимости от предполагаемого применения можно использовать многие другие комбинации опор. На фиг.5 три опоры/датчика 12, 14, 24 взаимно соединены между инерциальной массой 10 и неподвижным основанием 30 в направлении Х. Две опоры/датчика 16, 18 установлены между инерциальной массой 10 и неподвижным основанием 30 в направлении Y. Три опоры/датчика 20, 22, 42 установлены между массой 10 и неподвижным основанием 30 в направлении Z. То есть, статически определяющая в ином случае опорная система, состоящая из опор/датчиков 12, 14; 16, 18; 20, 22, увеличилась на две дополнительные опоры/датчика 24, 42 в направлениях Х и Y, сделав опорную систему статически неопределенной. Причем чувствительность акселерометра стала более жесткой в направлениях Х и Y.
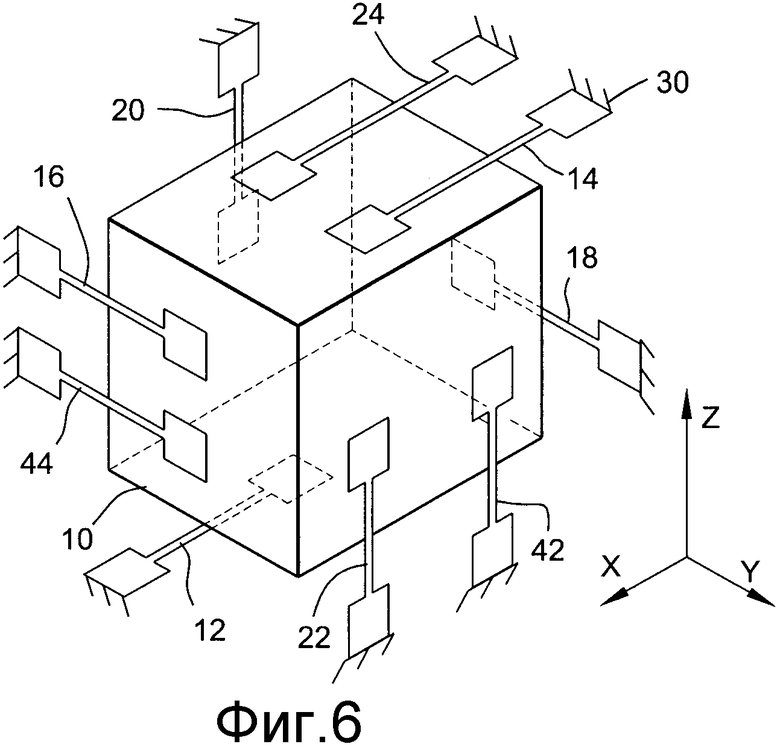
На фиг.6 представлено три датчика/опоры 12, 14, 24, которые проходят между инерциальной массой 10 и неподвижной опорой 30 в направлении Х; три опоры/датчика 16, 18, 44 проходят в направлении Y, и три опоры/датчика 20, 22, 42 проходят в направлении Z для совокупности девяти опор/датчиков. Таким образом, три опоры/датчика размещены в ортогональных направлениях, помимо статически определяющей опорной системы, тем самым превращая опорную систему в статически неопределенную.
Статически неопределенная опорная система не обязательно должна иметь опоры/датчики, проходящие между инерциальной массой и основанием вдоль осей, совпадающих с или параллельных шести осям X, Y, Z системы прямоугольных координат, при условии, что одна или более дополнительных опор/датчиков превращает статически определенную конструкцию опорной системы в статически неопределенную. Согласно фиг.7 опоры/датчики включают в себя опоры/датчики 50, 52, 62, проходящие в положительном направлении Х; опоры/датчики 54, 56, проходящие в положительном направлении Y; и опоры/датчики 58, 60, проходящие в положительном направлении Z. Между массой 10 и основанием 30 в отрицательных направлениях Х, Y, Z опор нет. Следует отметить, что опоры/датчики 50, 52, 54, 56, 58, 60 обеспечивают статически определенную опорную систему для массы 10. Введение одного или более датчиков/опор, например введение датчика/опоры 62 в положительном направлении Х, делает опорную систему статически неопределенной. Поэтому опорная система согласно фиг.7 имеет повышенную жесткость в направлении Х.
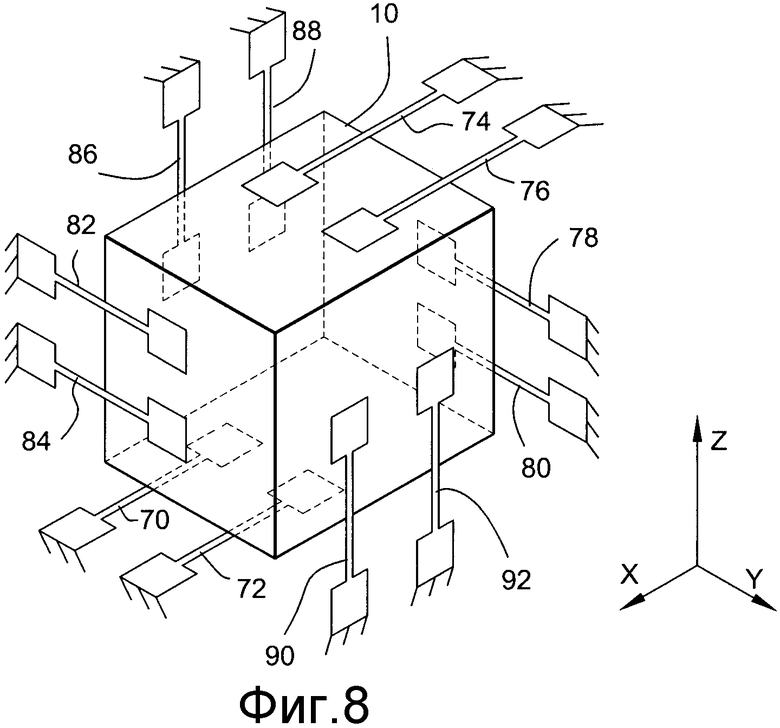
Пары опор/датчиков проходят и в положительных и в отрицательных направлениях системы прямоугольных координат. Поэтому в статически неопределенной опорной системе согласно фиг.8 опоры/датчики включают в себя опоры/датчики 70, 72 и 74, 76, проходящие в соответствующих положительных и отрицательных направлениях Х; опоры/датчики 78, 80 и 82, 84, проходящие в соответствующих положительных и отрицательных направлениях; и опоры/датчики 86, 88 и 90, 92, проходящие в соответствующих положительных и отрицательных направлениях Z. Введение одного или более датчиков/опор, помимо необходимых шести опор, превращает опорную систему в статически неопределенную. Поэтому опорная система согласно фиг.8 имеет повышенную жесткость в направлениях X, Y, Z и обеспечивает более широкие пределы нагрузки/полезной нагрузки в любом заданном направлении. Из вышеуказанного следует, что в трехосевом акселерометре согласно настоящему изобретению осуществлено введение одной или более опор/датчиков в дополнение к опорам/датчикам, которые превращают опорную систему в статически определенную.
На фиг.3 показан разведочный инструмент 70 для нефти, который может содержать модуль 32 акселерометра согласно настоящему изобретению. Например, модуль 32 можно установить в цилиндрическом кожухе инструмента 70. В модуле 32 неподвижное основание 30 и статически неопределенная опорная система для инерциальной массы установлены компактно. Основание и система легко устанавливаются и интегрируются с электронной аппаратурой навигационного разведочного инструмента 70.
Изобретение изложено в связи с его осуществлением, которое в настоящее время считается наиболее предпочтительным, но подразумевается, что изобретение не ограничивается этим осуществлением, а содержит различные модификации, входящие в рамки идеи и объема прилагаемой формулы изобретения.
Перечень компонентов
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| ВЫСОКОТОЧНЫЙ КОСМИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2468374C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2496689C1 |
| КОСМИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПРИРАЩЕНИЯ СКОРОСТИ | 2012 |
|
RU2524687C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЯГИ СТАЦИОНАРНОГО ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2022 |
|
RU2786669C1 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |

Изобретение относится к акселерометрам, в частности к трехосевым кристаллическим акселерометрам. Акселерометр содержит инерциальную массу (10), неподвижное основание (30) и по меньшей мере одну или более опор/датчиков (12, 14; 16, 18; 20, 22, 24), которые являются опорой для массы на основании, делая опорную систему статически неопределенной. Опоры/датчики предпочтительно являются двухконечными двухпучковыми камертонами (34), подвешенными между монтажными площадками и которым генератор (40) придает вибрацию. За счет введения одной или более опор/датчиков, помимо опор/датчиков, необходимых для статически определенной опорной системы, опорная система становится статически неопределенной и поэтому чувствительной в одном или более направлениях. 9 з.п. ф-лы, 8 ил.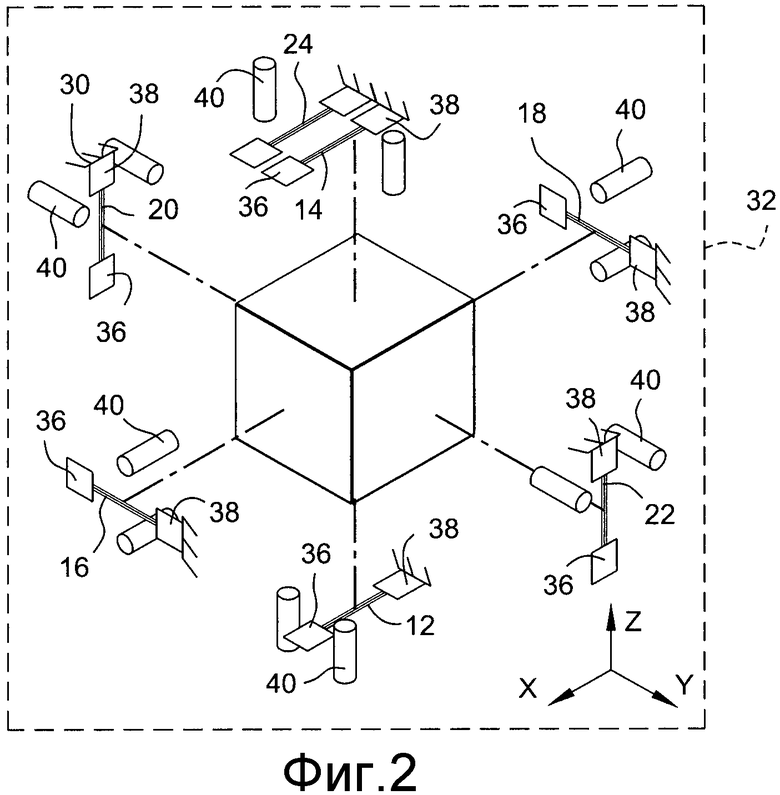
1. Датчик для измерения ускорения в трех измерениях, содержащий инерциальную массу (10) и опорную систему для инерциальной массы, причем опорная система содержит основание (30) и множество опорных элементов (12, 14, 16, 18, 20, 22, 24), проходящих между основанием и инерциальной массой для подвешивания инерциальной массы в ортогональных направлениях, обеспечивая статически неопределенную конструкцию, датчики (34) напряжений, предназначенные для измерения обусловленного напряжением ускорения в опорных элементах посредством определения параметра ускорения массы.
2. Датчик по п.1, отличающийся тем, что множество опорных элементов включает в себя по меньшей мере семь опорных элементов (12, 14, 16, 18, 20, 22, 24), размещенных между основанием и инерциальной массой.
3. Датчик по п.1, отличающийся тем, что множество опорных элементов содержит пары опорных элементов (12, 14; 16, 18; 20, 22, 24), размещенных между основанием и инерциальной массой в ортогональных направлениях соответственно, причем отдельные опорные элементы каждой пары опорных элементов проходят параллельно друг другу, при этом множество опорных элементов содержит также еще один опорный элемент (24), размещенный между основанием и инерциальной массой в одном из ортогональных направлений для обеспечения жесткости в этом одном из ортогональных направлений, дополнительно к жесткости в других ортогональных направлениях.
4. Датчик по п.1, отличающийся тем, что отдельные опорные элементы (12, 14; 16, 18; 20, 22, 24) множества опорных элементов проходят от противоположных сторон массы, по существу, параллельно ортогональным направлениям.
5. Датчик по п.1, отличающийся тем, что множество опорных элементов (12, 14; 16, 18; 20, 22, 24) содержит пары опорных элементов, проходящих между основанием и инерциальной массой в ортогональных направлениях соответственно, при этом отдельные опорные элементы каждой пары опорных элементов проходят параллельно друг к другу, по меньшей мере один элемент из множества опорных элементов (24) имеет чувствительность к прилагаемому ускорению в одном из ортогональных направлений, которая отличается от чувствительности к прилагаемому ускорению по меньшей мере в другом направлении из упомянутых ортогональных направлений.
6. Датчик по п.5, отличающийся тем, что упомянутый один опорный элемент (24) является опорным элементом в дополнение к трем парам опорных элементов (12, 14; 16, 18; 20, 22) делающих опорную систему статически определяющей.
7. Датчик по п.6, отличающийся тем, что отдельные опорные элементы (12, 14; 16, 18; 20, 22) каждой пары опорных элементов проходят от противоположных сторон массы.
8. Датчик по п.1, отличающийся тем, что множество опорных элементов (12, 14; 16, 18; 20, 22, 24) содержит пары опорных элементов, проходящих между основанием и инерциальной массой в ортогональных направлениях соответственно, отдельные опорные элементы каждой пары опорных элементов проходят параллельно друг к другу и от соответствующих противоположных сторон массы, при этом множество опорных элементов также содержит по меньшей мере два дополнительных опорных элемента (22, 24), размещенных между инерциальной массой и основанием в двух ортогональных направлениях соответственно для обеспечения жесткости в упомянутых двух ортогональных направлениях дополнительно к жесткости и в другом ортогональном направлении.
9. Датчик по п.1, отличающийся тем, что каждый опорный элемент содержит пучковый резонатор на кристалле кварца.
10. Датчик по п.1, отличающийся тем, что каждый опорный элемент содержит двухпучковый резонатор на кристалле кварца.
| US 6826960 В2, 07.12.2004 | |||
| US 5962788 А, 05.10.1999 | |||
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| JP 5203667 A, 10.08.1993. | |||

