Объектами настоящего изобретения являются способ настройки инерциальной навигационной системы с осесимметричным вибрационным датчиком и инерциальная навигационная система, содержащая осесимметричный вибрационный датчик.
Уровень техники
Известно, что для определения направления носителя, в частности для навигационного обеспечения полета самолета обычно используют инерциальную навигационную систему, содержащую осесимметричные вибрационные датчики, такие как вибрационные датчики с полусферическим колпаком или «quapasons».
Известно также, что осесимметричный вибрационный датчик выполняют с возможностью работы в режиме гироскопа или в режиме гирометра. В режиме гироскопа возбуждают колебания, но положение колебаний остается свободным; когда ориентация носителя меняется, положение колебаний по отношению к основанию характеризует угол, на который повернулся носитель.
В режиме гирометра возбуждают колебания и поддерживают положение колебаний по отношению к основанию неподвижным путем подачи соответствующей электронной команды; в этом случае значение этой команды характеризует скорость вращения носителя в инерциальном пространстве.
На практике осесимметричные вибрационные датчики используют для навигации в гироскопическом режиме, который позволяет использовать высококачественный масштабный множитель (коэффициент Бриана).
Навигация включает в себя две основные фазы:
- подготовительная фаза, называемая фазой настройки, позволяющая определить первоначальную ориентацию инерциальной системы навигации,
- собственно навигация, во время которой первоначальная географическая ориентация служит системой отсчета для вычисления географической ориентации и положения носителя в определенные моменты.
Получаемое качество навигации и, в частности, точность расчета курса напрямую связаны с погрешностью ухода гироскопов, которыми оснащена навигационная система.
Осесимметричные вибрационные гироскопы, используемые в гироскопическом режиме, характеризуются погрешностью ухода, которая является функцией положения колебаний по отношению к основанию датчика. Разумеется, эту погрешность ухода моделируют и компенсируют, но эта компенсация не является идеальной. Таким образом, остается погрешность ухода, зависящая от положения. Во время использования таких гироскопов в навигационных системах эта погрешность ухода является одной из причин ошибок системы навигации.
Кроме того, погрешность ухода изменяется также в зависимости от температуры и в зависимости от времени.
Изобретение основано на двух положениях:
1. Погрешность ухода гироскопов во время фазы настройки имеет исключительное влияние на качество навигации.
2. Во время фазы настройки носитель не меняет ориентации.
Когда запускают инерциальную навигационную систему, первоначальное положение колебаний может быть любым и может меняться от одного запуска к другому; таким образом, погрешность ухода, связанная с положением колебаний, является переменной величиной и может влиять на качество настройки.
Задача изобретения
Задачей изобретения является сведение к минимуму влияния погрешности ухода на навигационные характеристики инерциальной навигационной системы.
Сущность изобретения
Для решения этой задачи согласно изобретению предлагается способ настройки инерциальной навигационной системы с осесимметричным вибрационным датчиком, генерирующим колебания, при этом способ содержит этап установки колебаний в положении, при котором датчик характеризуется минимальным изменением погрешности ухода по сравнению с изменением погрешности ухода при других положениях колебаний.
Этот способ позволяет:
- свести к минимуму ошибки настройки, появляющиеся в результате погрешности ухода датчика,
- улучшить повторяемость погрешности ухода от одной настройки к другой, что позволяет ее отслеживать и, следовательно, компенсировать, так как положение колебаний остается неизменным.
Согласно предпочтительному варианту осуществления способа в соответствии с настоящим изобретением управляемый выбор положения колебаний во время фазы настройки осуществляют, в основном учитывая изменение погрешности ухода в зависимости от температуры.
Согласно предпочтительному варианту осуществления способа в соответствии с настоящим изобретением выбор положения колебаний в фазе настройки осуществляют, прежде всего, учитывая изменение погрешности ухода в зависимости от температуры, а затем изменение погрешности ухода в зависимости от времени.
Другим объектом настоящего изобретения является инерциальная навигационная система, содержащая осесимметричный вибрационный датчик, средства возбуждения датчика для генерирования колебаний и средства установки колебаний в положении, при котором изменение погрешности ухода сводится к минимуму по сравнению с изменением погрешности ухода при других положениях колебаний.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания неограничительного частного варианта выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
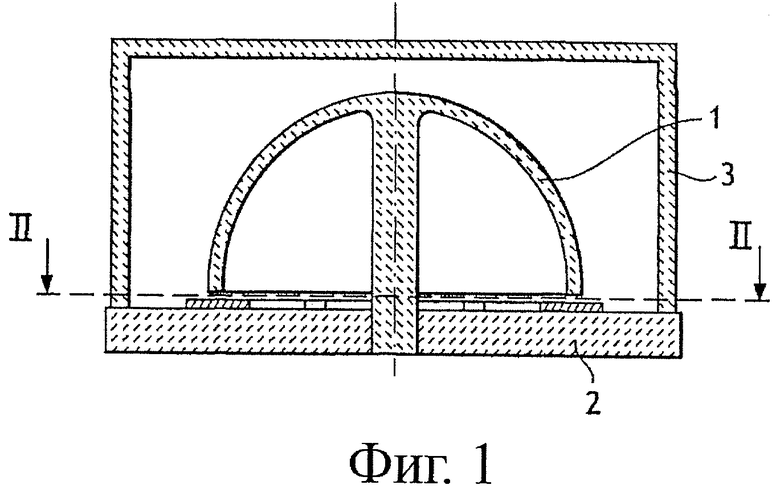
Фиг.1 - схематичный вид в осевом разрезе по линии I-I на фиг.2 вибрационного датчика с полусферическим колпаком.
Фиг.2 - вид в разрезе по линии II-II на фиг.1 с блок-схемой, иллюстрирующей пример осуществления способа в соответствии с настоящим изобретением.
Подробное описание изобретения
Как известно, показанный на фигурах вибрационный датчик с полусферическим колпаком содержит выступающий колпак 1, установленный на выступающем основании 2. Колпак 1 окружен герметичным корпусом 3, позволяющим создавать вакуум вокруг датчика.
Внутренняя поверхность колпака 1, так же как и его нижний край, имеют металлическое покрытие, и этот нижний край находится напротив двух пар управляющих электродов 4 и двух пар детекторных электродов 5, соединенных соответствующих образом с блоком 6 управления и детектирования для генерирования колебаний 11, которые показаны на фиг.2 штрихпунктирной линией, положение колебаний задается блоком 6 управления.
Блок 6 управления и детектирования соединен с устройством 7 вычисления ориентации датчика на основании сигналов детектирования, полученных блоком управления и детектирования.
Согласно изобретению, фазу настройки осуществляют путем возбуждения датчика управляющим сигналом, позиционирующим полученные колебания, согласно выбранному положению, записанному в запоминающем устройстве 9.
В представленном примере выбранное положение для осуществления фазы настройки определяется во время фазы калибровки 10, которую предпочтительно осуществляют на заводе и которая содержит следующие этапы: датчик удерживают неподвижным и возбуждают управляющим сигналом 13 колебания с разными последовательными положениями, показанные на фиг.2 штрихпунктирной линией 11 и двойными сплошными стрелками 12. Для каждого положения колебаний осуществляют измерение 14 вибраций погрешности ухода в зависимости от температуры, доводя датчик последовательно до разных температур, сохраняя при этом постоянным командный сигнал управления положением колебаний. Различные измерения полученного реального положения вводят в память, затем производят сравнение между изменениями погрешности ухода для осуществления выбора 15 положения, которое дает минимальные изменения в зависимости от температуры.
В случае, когда изменение погрешности ухода в зависимости от температуры является одинаковым для нескольких положений колебаний, согласно предпочтительному варианту выполнения изобретения для каждого положения колебаний предусматривают новое измерение при постоянной температуре и в разные моменты времени, чтобы выявить изменение погрешности ухода в зависимости от времени и выбрать положение, которое дает минимальное изменение погрешности ухода. Выбранное, в конечном счете, положение вводят в память устройства 9 запоминания положения с целью дальнейшего использования в каждой фазе настройки. Во время каждой фазы настройки колебания устанавливают непосредственно в положении, записанном в памяти запоминающего устройства.
Предпочтительно погрешность ухода, включая ее изменения, моделируют в зависимости от температуры и в зависимости от времени и результаты моделирования вводят в запоминающее устройство 9 для передачи в блок 6 управления и детектирования с целью коррекции измерений, произведенных во время фазы настройки.
Разумеется, изобретение не ограничивается описанным вариантом выполнения и в него можно вносить изменения, не выходя при этом за рамки изобретения, определенные формулой изобретения.
В частности, хотя в представленном предпочтительном варианте выполнения предусмотрен приоритетный выбор по изменению погрешности ухода в зависимости от температуры, которая, как правило, является наиболее чувствительным параметром, можно предусмотреть выбор положения по изменению погрешности ухода в зависимости от времени или, наоборот, ограничить выбор положением, при котором изменения являются минимальными в зависимости от температуры.
Хотя изобретение было описано для частного случая применения вибрационного датчика с полусферическим колпаком, изобретение можно применять для любого осесимметричного вибрационного датчика, используемого в режиме гироскопа «quapason».
Несмотря на то, что изобретение было описано с предварительной фазой калибровки, положение вибрации для фазы настройки можно выбирать вначале произвольно, затем изменять после определенного числа полетов, что позволяет производить статистический анализ погрешности ухода для разных положений, в которых колебания устанавливают во время последовательных фаз настройки, и сравнивать полученные результаты для окончательного выбора оптимального положения во время фазы настройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ОСЕСИММЕТРИЧНОГО ВИБРАЦИОННОГО ДАТЧИКА И ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2423669C1 |
| БЛОК СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2567094C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499223C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499225C1 |
Изобретение относится к инерциальным навигационным системам, предназначенным, в частности, для навигационного обеспечения полета самолета. Способ настройки инерциальной навигационной системы с осесимметричным вибрационным датчиком, генерирующим колебания, включает этап установки колебаний в положение, при котором датчик характеризуется изменением погрешности ухода, которое является минимальным по сравнению с изменением погрешности ухода при других положениях колебаний. Изобретение позволяет свести к минимуму влияния погрешности ухода на навигационные характеристики инерциальной навигационной системы. 2 с. и 6 з.п. ф-лы, 2 ил.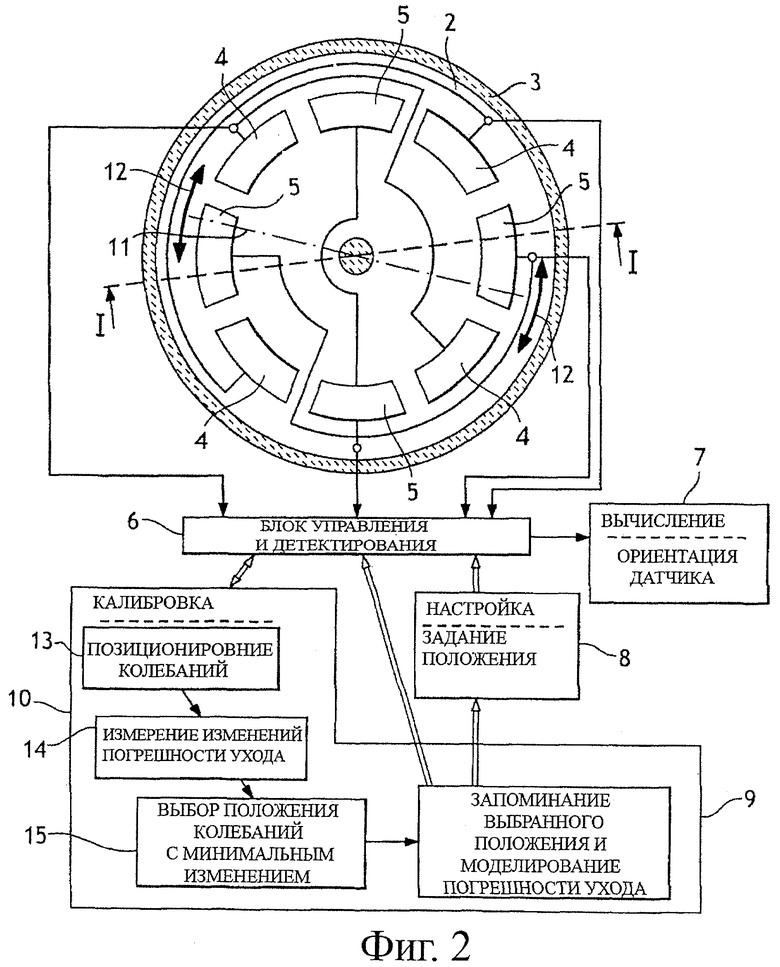
1. Способ настройки инерциальной навигационной системы с осесимметричным вибрационным датчиком, генерирующим колебания, отличающийся тем, что содержит этап установки колебаний в положении, при котором датчик характеризуется изменением погрешности ухода, которое является минимальным по сравнению с изменением погрешности ухода при других положениях колебаний.
2. Способ по п.1, отличающийся тем, что содержит фазу калибровки (10), содержащую этапы, на которых датчик возбуждают для установки колебаний в разных последовательных положениях (13) и при разных температурах, для каждого положения колебаний измеряют изменение (14) погрешности ухода в зависимости от температуры и выбирают (15) положение, при котором изменение погрешности ухода является минимальным.
3. Способ по п.1, отличающийся тем, что содержит фазу калибровки (10), содержащую этапы, на которых датчик возбуждают для установки колебаний в разных последовательных положениях (13) при постоянной температуре, для каждого положения колебаний измеряют изменение (14) погрешности ухода в разные моменты времени и выбирают (15) положение, при котором изменение погрешности ухода является минимальным.
4. Способ по п.1, отличающийся тем, что содержит фазу калибровки (10), содержащую этапы, на которых датчик возбуждают для установки колебаний в разных последовательных положениях (13) и при разных температурах, для каждого положения колебаний измеряют изменение погрешности ухода в зависимости от температуры, выбирают положения, при которых изменение (14) погрешности ухода являются минимальными, для полученных положений измеряют изменения (14) погрешности ухода в разные моменты времени и выбирают положение, при котором изменение погрешности ухода в зависимости от времени является минимальным.
5. Способ по п.1, отличающийся тем, что содержит фазу калибровки, содержащую этапы, на которых моделируют погрешности ухода и определяют поправку погрешности ухода.
6. Инерциальная навигационная система, содержащая осесимметричный вибрационный датчик, средства (6) возбуждения датчика для генерирования колебаний, отличающаяся тем, что содержит средства (8) установки колебаний в положении, при котором датчик характеризуется изменением погрешности ухода, которое является минимальным по сравнению с изменением погрешности ухода при других положениях колебаний.
7. Инерциальная навигационная система по п.6, отличающаяся тем, что содержит устройство (9) запоминания положения, при котором датчик характеризуется погрешностью ухода с минимальными изменениями.
8. Инерциальная навигационная система по п.7, отличающаяся тем, что содержит средства (9) запоминания модели погрешности ухода и средства (6) корректировки погрешности ухода.
| Лесная сеялка | 1986 |
|
SU1445580A1 |
| Способ изготовления плавленныхфлюСОВ | 1978 |
|
SU810418A1 |
| HONG S.K | |||
| Compensation of nonlinear thermal bias drift of Resonant Rate Sensor using fuzzy logic | |||
| SENSORS AND ACTUATORS A, ELSEVIER SEQUOIA S/A/, LAUSANNE, CH, V.78, №2-3, 14 decembre 1999, p.143-148 | |||
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |
| JP 11325927 А, 26.11.1999 | |||
| JP 7270178 А, 20.10.1995. | |||

